

Real-time Online Compression Method for Vehicle Trajectory Data Based on Smart Phone Sensors
-
摘要:
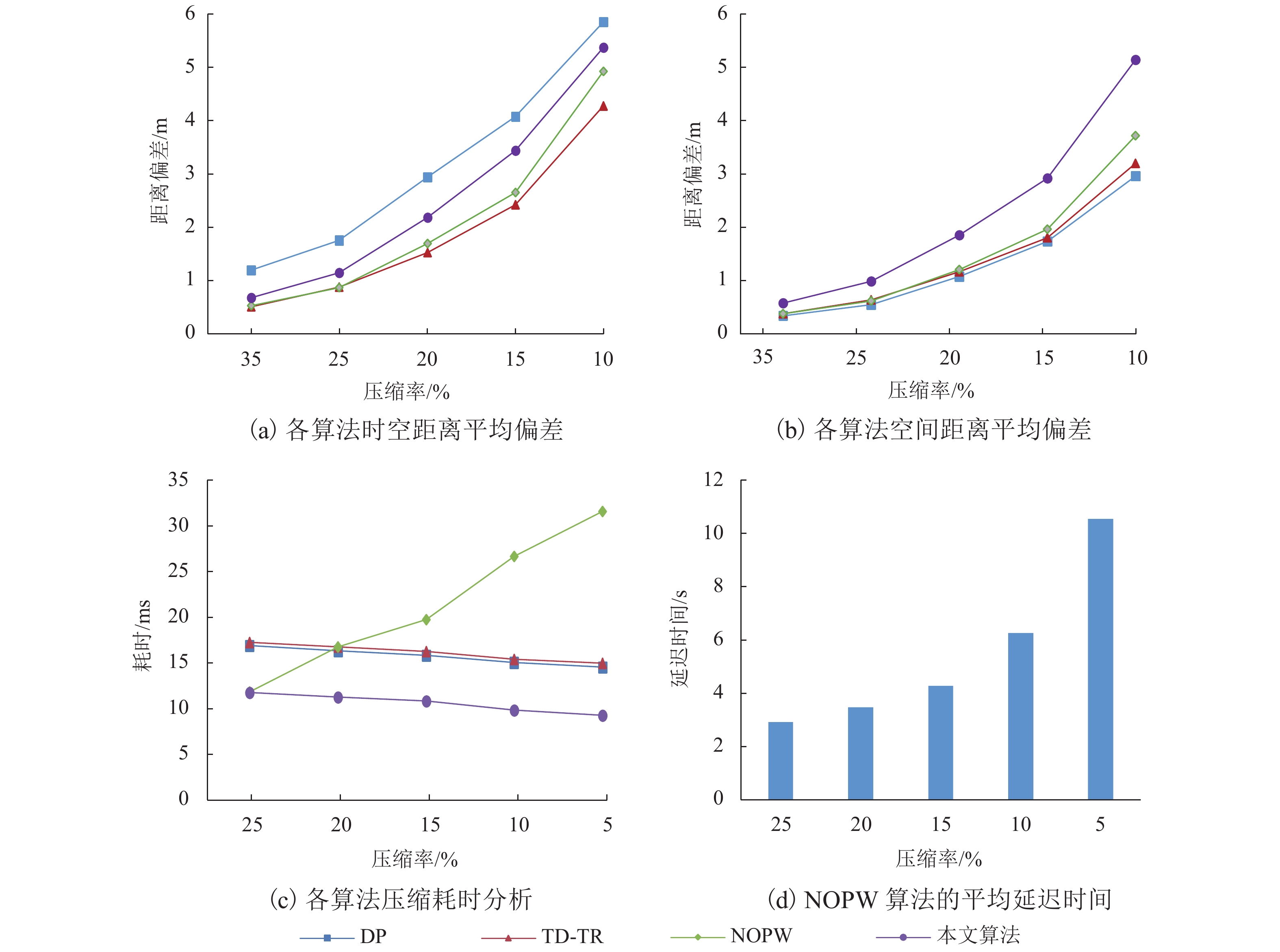
随着具有定位功能的各类便携式移动设备的普及,产生了大量的移动目标时空轨迹数据,庞大的数据规模对轨迹数据管理和分析带来了严峻的挑战. 车辆时空轨迹数据压缩算法,通过监测分析车辆在不同运动行为模式下智能手机内置线性加速度传感器和方向传感器的数据变化规律,识别车辆的转向行为和变速行为,并根据识别结果请求GPS传感器定位,记录相应轨迹特征点,从而实现车辆轨迹的实时在线压缩. 将本文算法与基于特征点提取的轨迹压缩的代表性算法进行对比实验,结果表明:本文算法在压缩精度上稍弱于代表性算法,与在线NOPW (normalopening window)算法相比,时空距离偏差平均比其多0.4 m,空间距离偏差平均比其多0.6 m;本文算法可在当前秒获得特征点,比DP (douglas-peucker)算法减少约30%的计算耗时,减少了网络传输数据量;只在关键特征点处请求定位采样,压缩结果能一定程度地适应路况变化,减少了对手机存储空间的占用,并有助于降低手机耗电量.
Abstract:Popularization of various portable mobile devices with positioning function produces massive spatial-temporal trajectory data of moving objects, and the huge data scale has brought severe challenges to trajectory data management and analysis. Therefore, a spatial-temporal trajectory data compression algorithm based on smart phone sensors is proposed. The algorithm recognizes the turning behavior and speed change behavior of the vehicle by monitoring and analyzing the data change law of the linear acceleration sensor and direction sensor built in the smartphone, and requests GPS sensor positioning to record the corresponding trajectory feature points according to the pattern recognition result, so as to realize real-time online compression of vehicle trajectory. The proposed algorithm is compared with the representative trajectory compression algorithms characterized by feature point extraction. The results indicate that it is slightly weaker than the representative trajectory compression algorithms in compression accuracy, its spatial-temporal distance deviation is 0.4 meters more than that of the online NOPW (normalopening window) algorithm on average, and its spatial distance deviation is 0.6 meters more that of the online NOPW algorithm on average. The real-time performance of the proposed algorithm is strong, and the feature points can be obtained in the current second, the calculation efficiency of the proposed algorithm is high, and the calculation time consumption is reduced by about 30% compared with the DP (douglas-peucker) algorithm, which reduces the amount of network transmission data; It only requests positioning and sampling at key feature points, the compression results is able to adapt to changes in road conditions to some extent, thus it reduces the storage space of the mobile phone, and decreases the power consumption of the mobile phone.
-
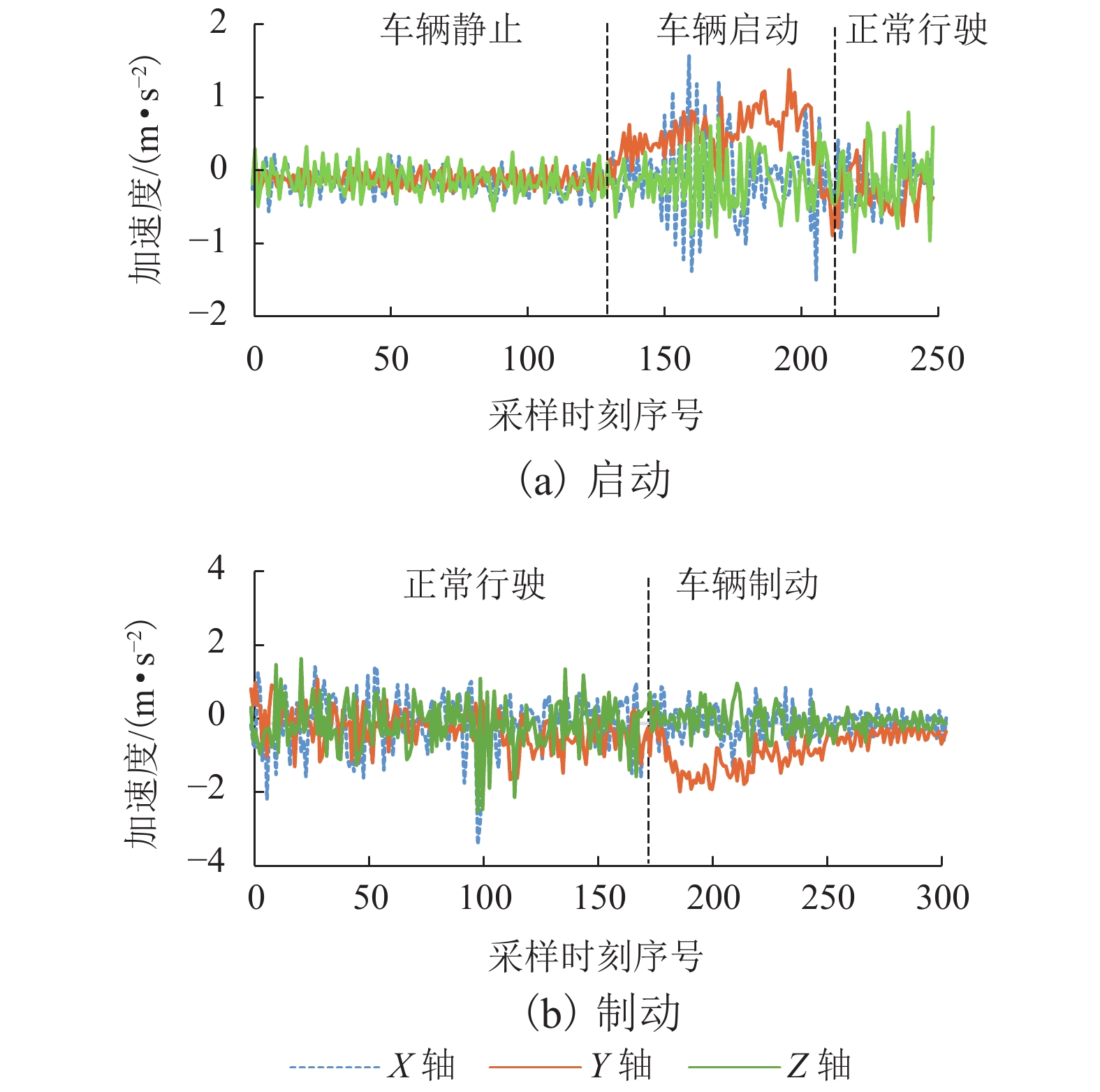
图 3 车辆启动、制动时线性加速度计数据变化趋势
Figure 3. Changes in linear accelerometer data during vehicle starting and breaking
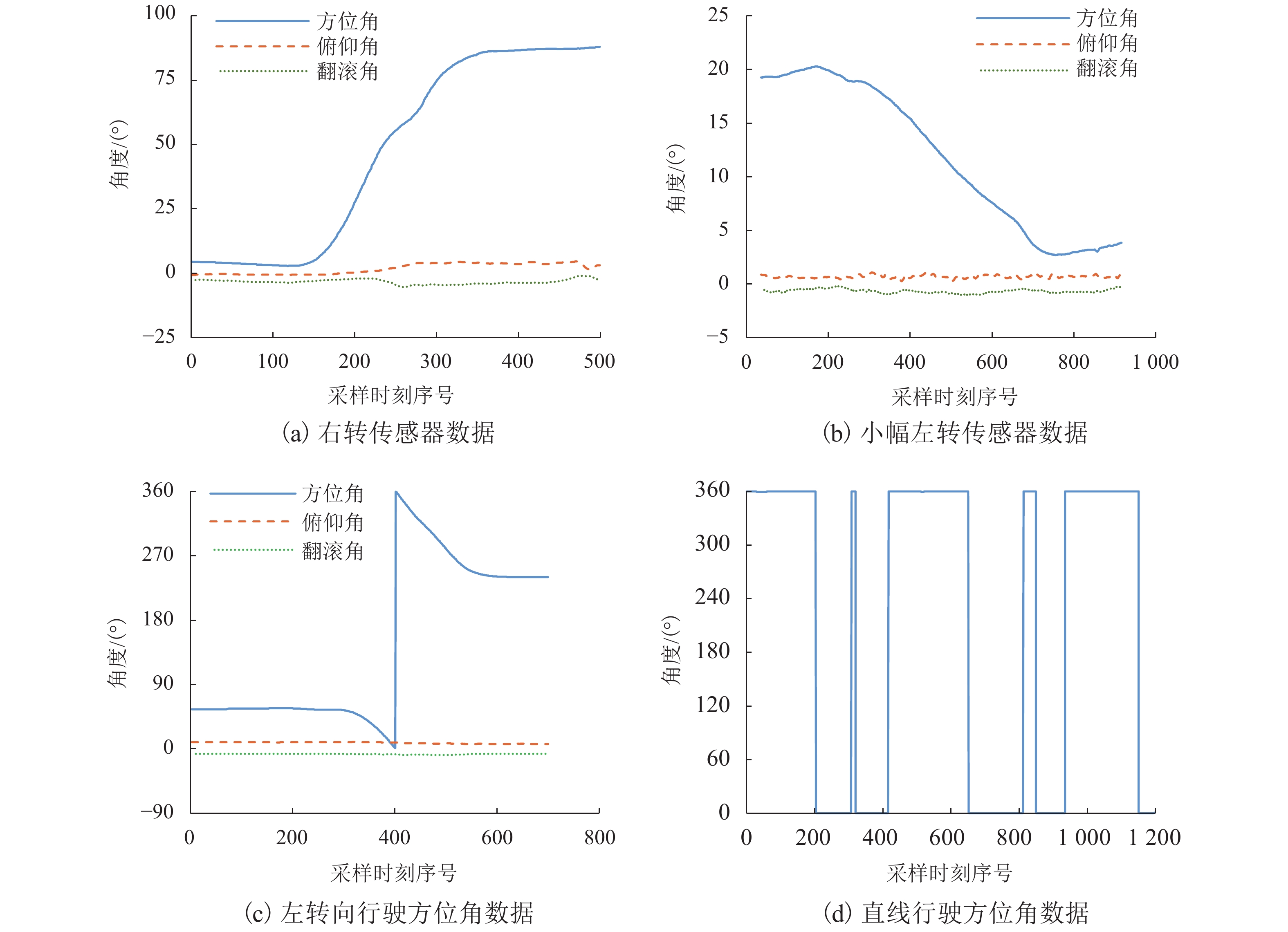
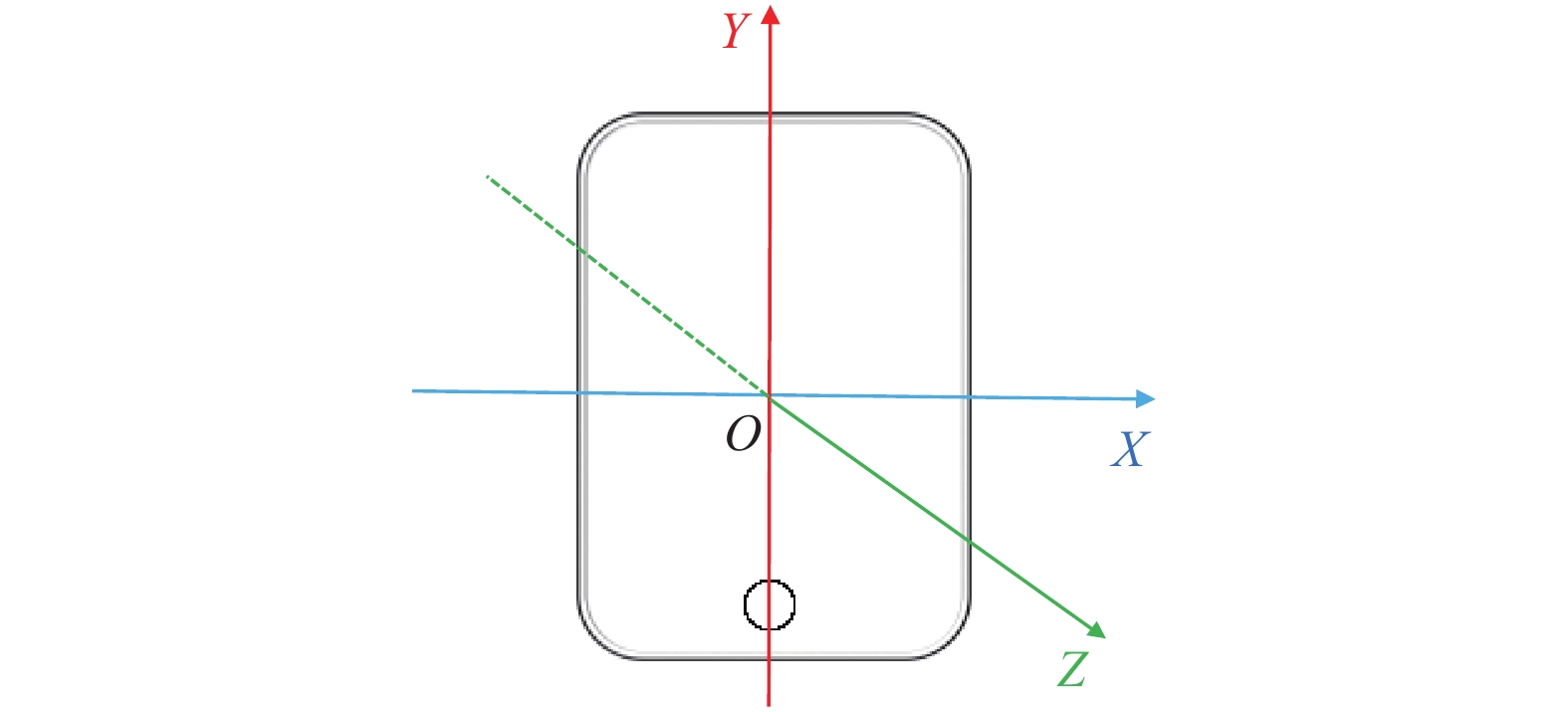
图 4 车辆转向行驶时方向传感器三轴数据变化
Figure 4. Changes in three-axis data of direction sensor during vehicle turning
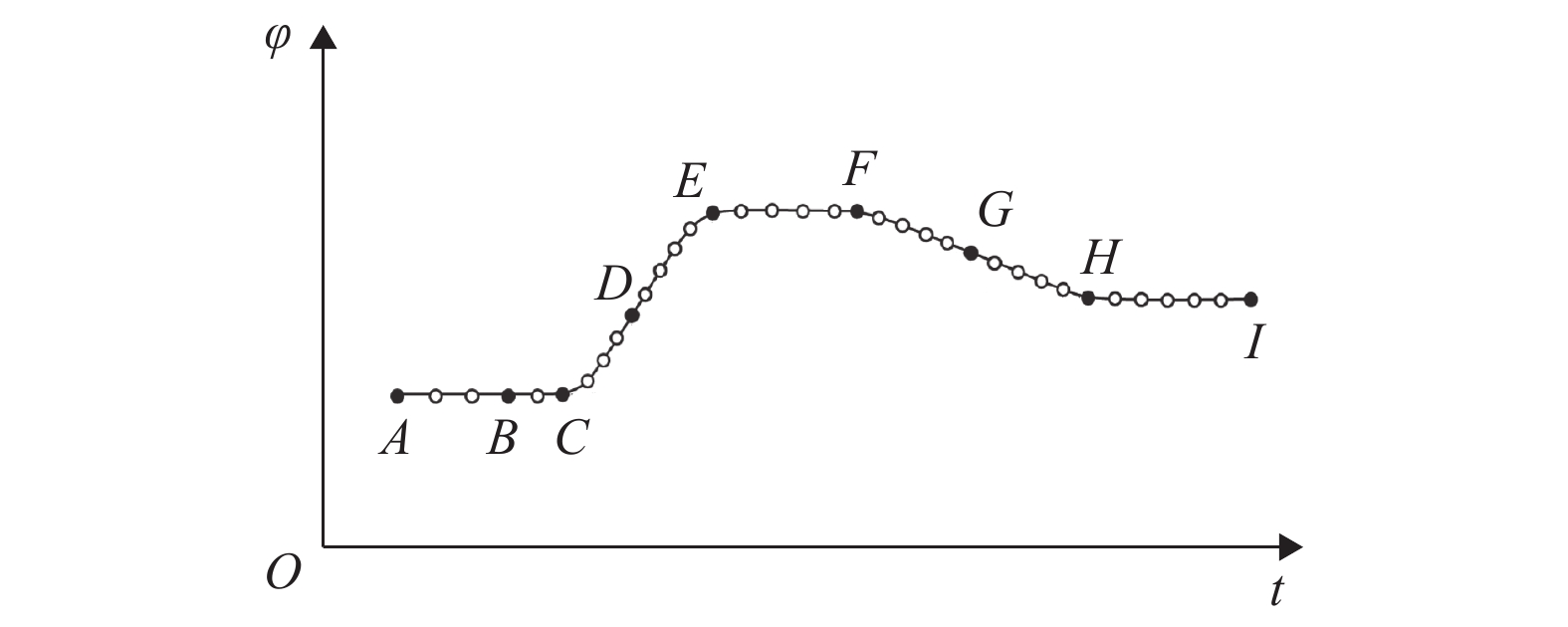
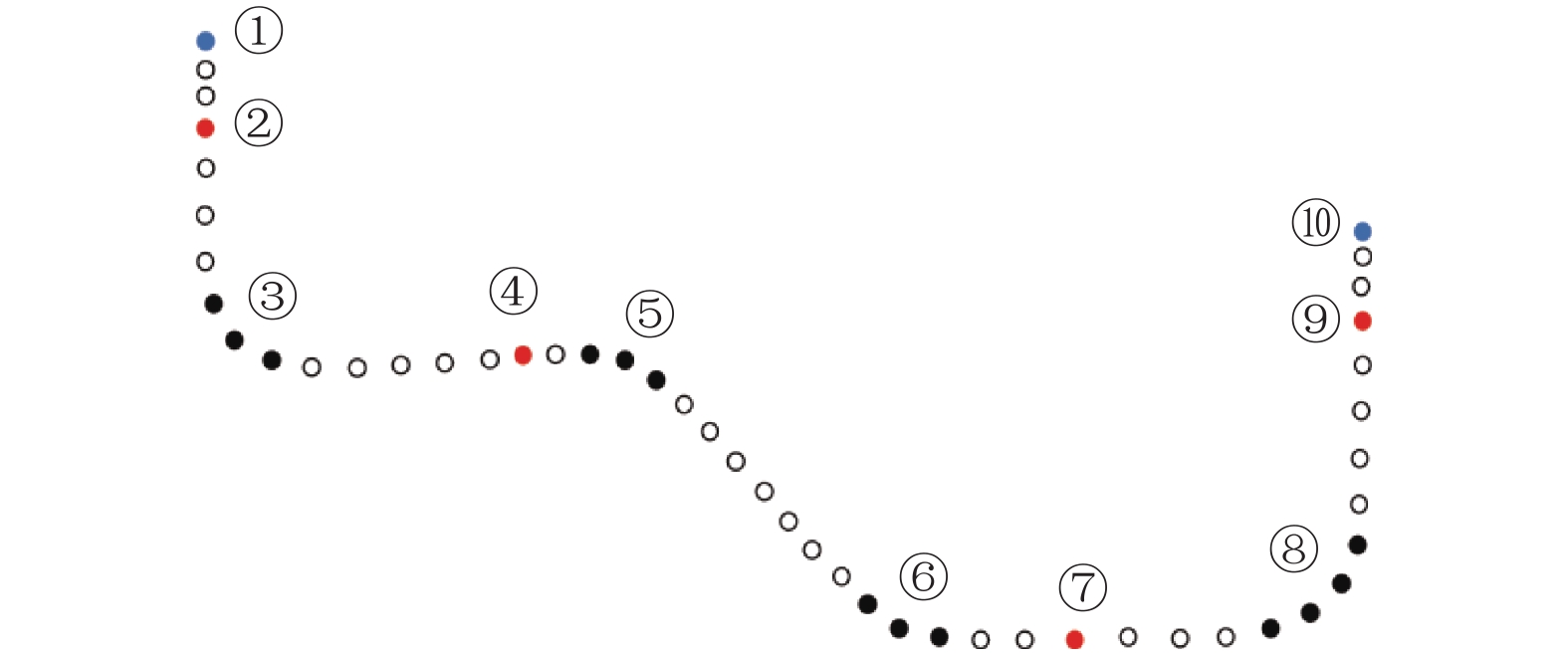
图 5 基于方位角的车辆转向特征点采样示意
Figure 5. Acquisition of vehicle turning feature points based on azimuth angle
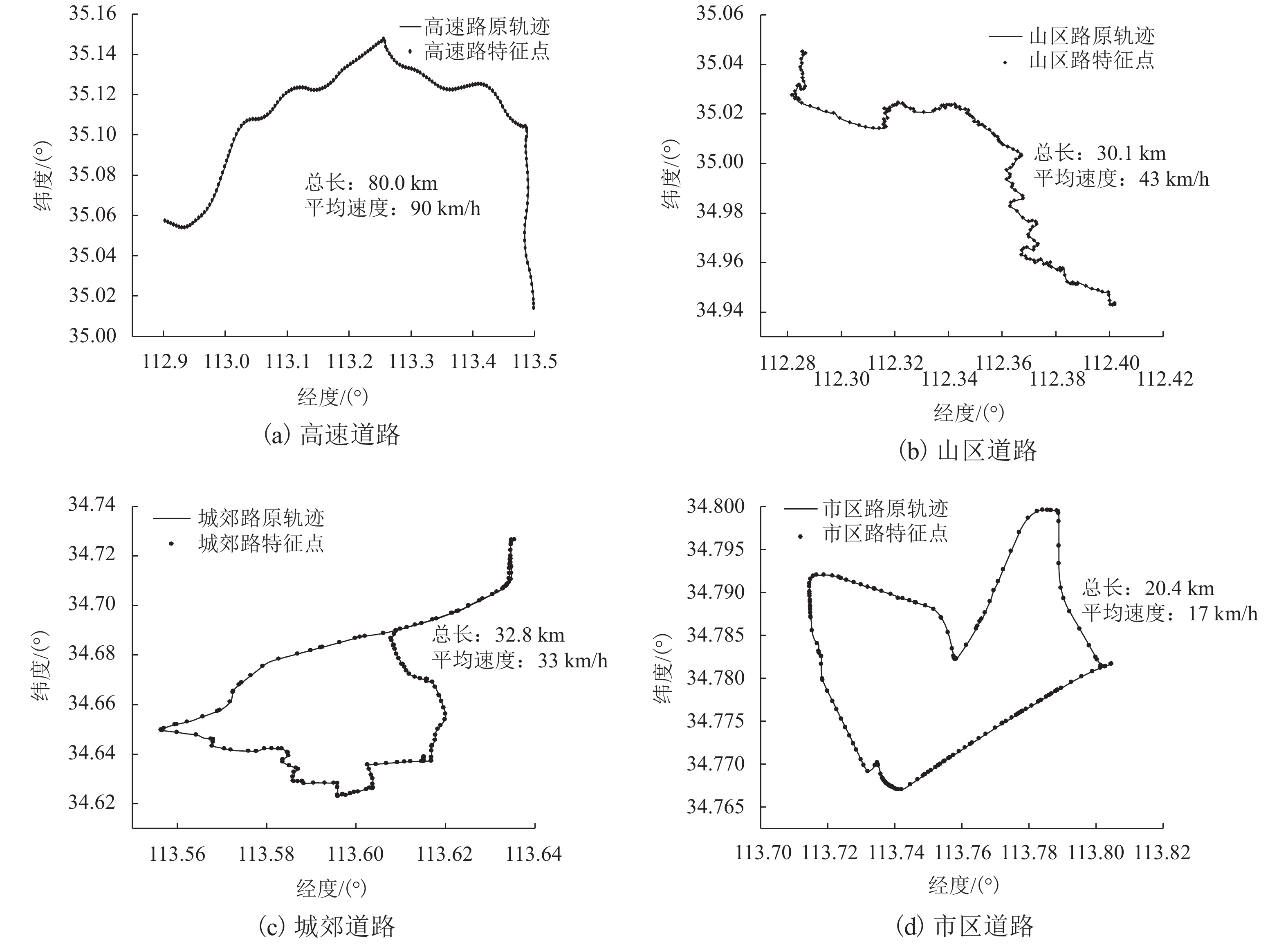
图 8 4种不同类型的实测轨迹路线图及其压缩结果
Figure 8. Compression results of four different types of experimental vehicle trajectories
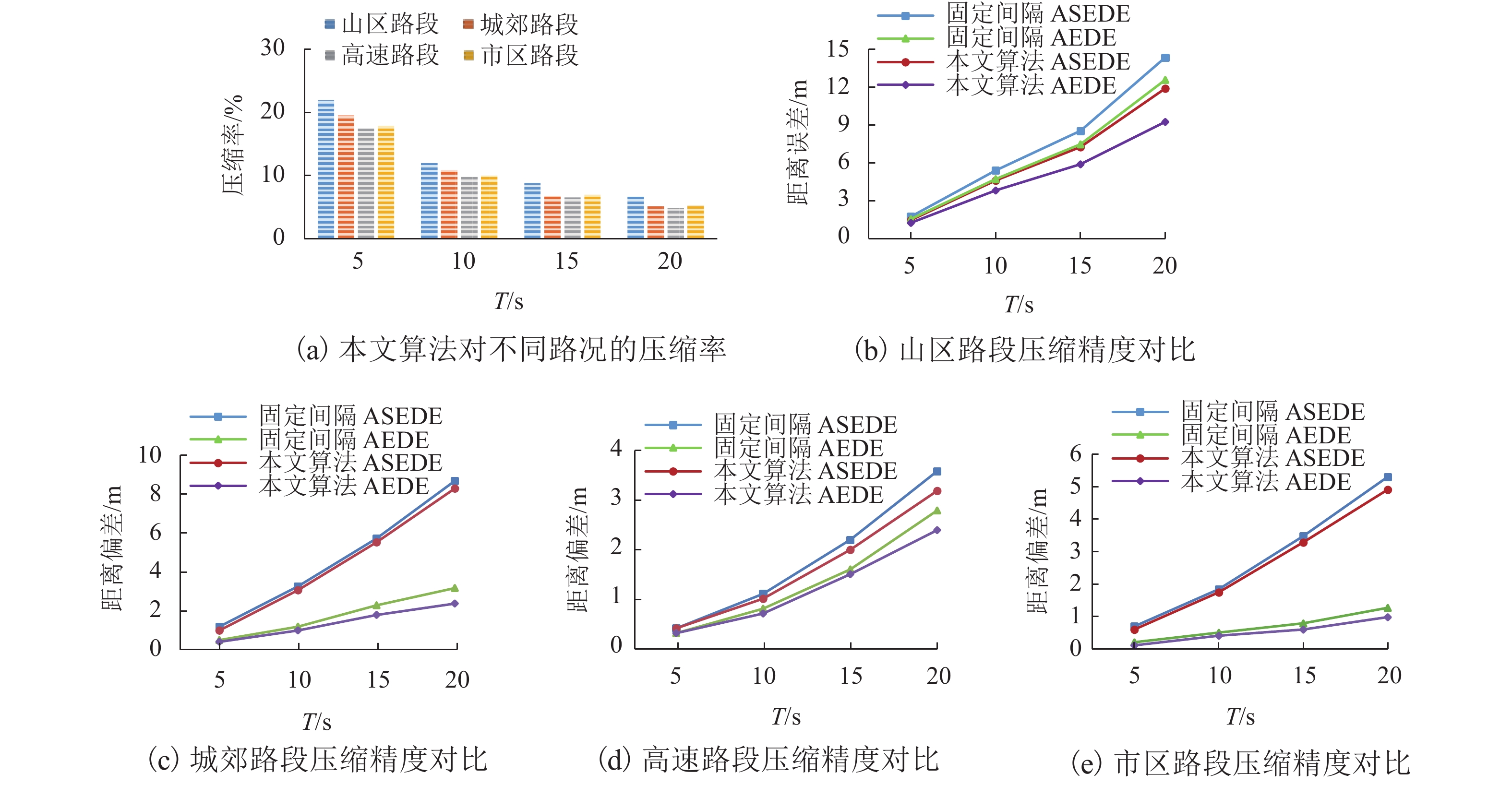
图 9 本文算法与固定间隔采样的压缩精度对比
Figure 9. Comparison of compression accuracy between proposed algorithm and fixed interval sampling
-
[1] RAY S, BLANCO R, GOEL A K. Supporting location-based services in a main-memory database[C]//2014 IEEE 15th International Conference on Mobile Data Management. Brisbane: IEEE, 2014: 3-12. [2] SUN P H, XIA S X, YUAN G, et al. An overview of moving object trajectory compression algorithms[J]. Mathematical Problems in Engineering, 2016, 2016: 6587309.1-6587309.13. [3] DOUGLAS D H, PEUCKER T K. Algorithms for the reduction of the number of points required to represent a digitized line or its caricature[J]. Cartographica:the International Journal for Geographic Information and Geovisualization, 1973, 10(2): 112-122. doi: 10.3138/FM57-6770-U75U-7727 [4] MERATNIA N, DE BY R A. Spatiotemporal compression techniques for moving point objects[C]//The annual International Conference on Extending Database Technology. Berlin: Springer Berlin Heidelberg, 2004: 765-782. [5] CAO X, CONG G, JENSEN C S. Mining significant semantic locations from GPS data[J]. Proceedings of the VLDB Endowment, 2010, 3(1/2): 1009-1020. [6] KEOGH E, CHU S, HART D, et al. An online algorithm for segmenting time series[C]//Proceedings 2001 IEEE International Conference on Data Mining. San Jose: IEEE, 2001: 289-296. [7] 唐炉亮,刘章,杨雪,等. 符合认知规律的时空轨迹融合与路网生成方法[J]. 测绘学报,2015,44(11): 1271-1276, 1284. doi: 10.11947/j.AGCS.2015.20140591TANG Luliang, LIU Zhang, YANG Xue, et al. A method of spatio-temporal trajectory fusion and road network generation based on cognitive law[J]. Acta Geodaetica et Cartographica Sinica, 2015, 44(11): 1271-1276, 1284. doi: 10.11947/j.AGCS.2015.20140591 [8] SANDU POPA I, ZEITOUNI K, ORIA V, et al. Spatio-temporal compression of trajectories in road networks[J]. GeoInformatica, 2015, 19(1): 117-145. doi: 10.1007/s10707-014-0208-4 [9] SONG Renchu, SUN Weiwei, ZHENG Baihua, et al. PRESS: a novel framework of trajectory compression in road networks[C]//The 40th International Conference on Very Large Data Bases. Hangzhou: [s.n.], 2014: 661-672. [10] GAO Chongming, ZHAO Yi, WU Ruizhi, et al. Semantic trajectory compression via multi-resolution synchronization-based clustering[J]. Knowledge-Based Systems, 2019, 174: 177-193. doi: 10.1016/j.knosys.2019.03.006 [11] SU H, ZHENG K, ZENG K, et al. Making sense of trajectory data: a partition-and-summarization approach[C]//2015 IEEE 31st International Conference on Data Engineering. Seoul: IEEE, 2015: 963-974. [12] 武芳,巩现勇,杜佳威. 地图制图综合回顾与前望[J]. 测绘学报,2017,46(10): 1645-1664. doi: 10.11947/j.AGCS.2017.20170287WU Fang, GONG Xianyong, DU Jiawei. Overview of the research progress in automated map generalization[J]. Acta Geodaetica et Cartographica Sinica, 2017, 46(10): 1645-1664. doi: 10.11947/j.AGCS.2017.20170287 [13] DUARTE F, LOURENÇO A, ABRANTES A. Classification of physical activities using a smartphone:evaluation study using multiple users[J]. Procedia Technology, 2014, 17: 239-247. doi: 10.1016/j.protcy.2014.10.234 [14] ALMAN A, LAWI A, TAHIR Z. Pattern recognition of human activity based on smartphone data sensors using SVM multiclass[C]//Proceedings of the 1st International Conference on Science and Technology. Makassar: EAI, 2019: 2284606.1-2284606.11. [15] CATAL C, TUFEKCI S, PIRMIT E, et al. On the use of ensemble of classifiers for accelerometer-based activity recognition[J]. Applied Soft Computing, 2015, 37: 1018-1022. doi: 10.1016/j.asoc.2015.01.025 [16] HASEGAWA T. Smartphone sensor-based human activity recognition robust to different sampling rates[J]. IEEE Sensors Journal, 2021, 21(5): 6930-6941. doi: 10.1109/JSEN.2020.3038281 [17] LI Xiaoou, ZHOU Zhiyong, WU Jiajia, et al. Human posture detection method based on wearable devices[J]. Journal of Healthcare Engineering, 2021, 2021: 8879061.1-8879061.8. [18] GUVENSAN M, DUSUN B, CAN B, et al. A novel segment-based approach for improving classification performance of transport mode detection[J]. Sensors, 2017, 18(1): 87-105. doi: 10.3390/s18010087 [19] 姚振兴. 基于手机传感器数据的个体交通出行链信息采集方法研究[D]. 成都: 西南交通大学, 2018. [20] 龚彦云. 基于深度学习的出行模式识别技术研究[D]. 北京: 北京邮电大学, 2018. [21] 谢非,汪壬甲,沈世斌,等. 基于手机惯性传感器与多特征CNN的驾驶行为识别算法[J]. 中国惯性技术学报,2019,27(3): 288-294.XIE Fei, WANG Renjia, SHEN Shibin, et al. Detecting driving behaviors by smartphone inertial sensors based on multi-feature convolutional neural network[J]. Journal of Chinese Inertial Technology, 2019, 27(3): 288-294. [22] 杜文文. 基于智能手机传感器的人车状态持续感知与危险驾驶识别[D]. 合肥: 中国科学技术大学, 2019. [23] 周后飞. 基于移动终端的异常驾驶行为及碰撞事故识别技术研究[D]. 重庆: 重庆交通大学, 2016. [24] STRACZKIEWICZ M, JAMES P, ONNELA J P. A systematic review of smartphone-based human activity recognition for health research[EB/OL]. [2021-01-28]. https://arxiv.org/abs/1910.03970v1. [25] KENDALL M G. Rank correlation methods[M]. London: Charles Grifin Company, 1975. -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 579
- HTML全文浏览量: 392
- PDF下载量: 46
- 被引次数: 0