

Wind Tunnel Tests on Aerodynamic Characteristics of Moving Vehicles on Bridge Decks under Skew Tail-Wind
-
摘要:
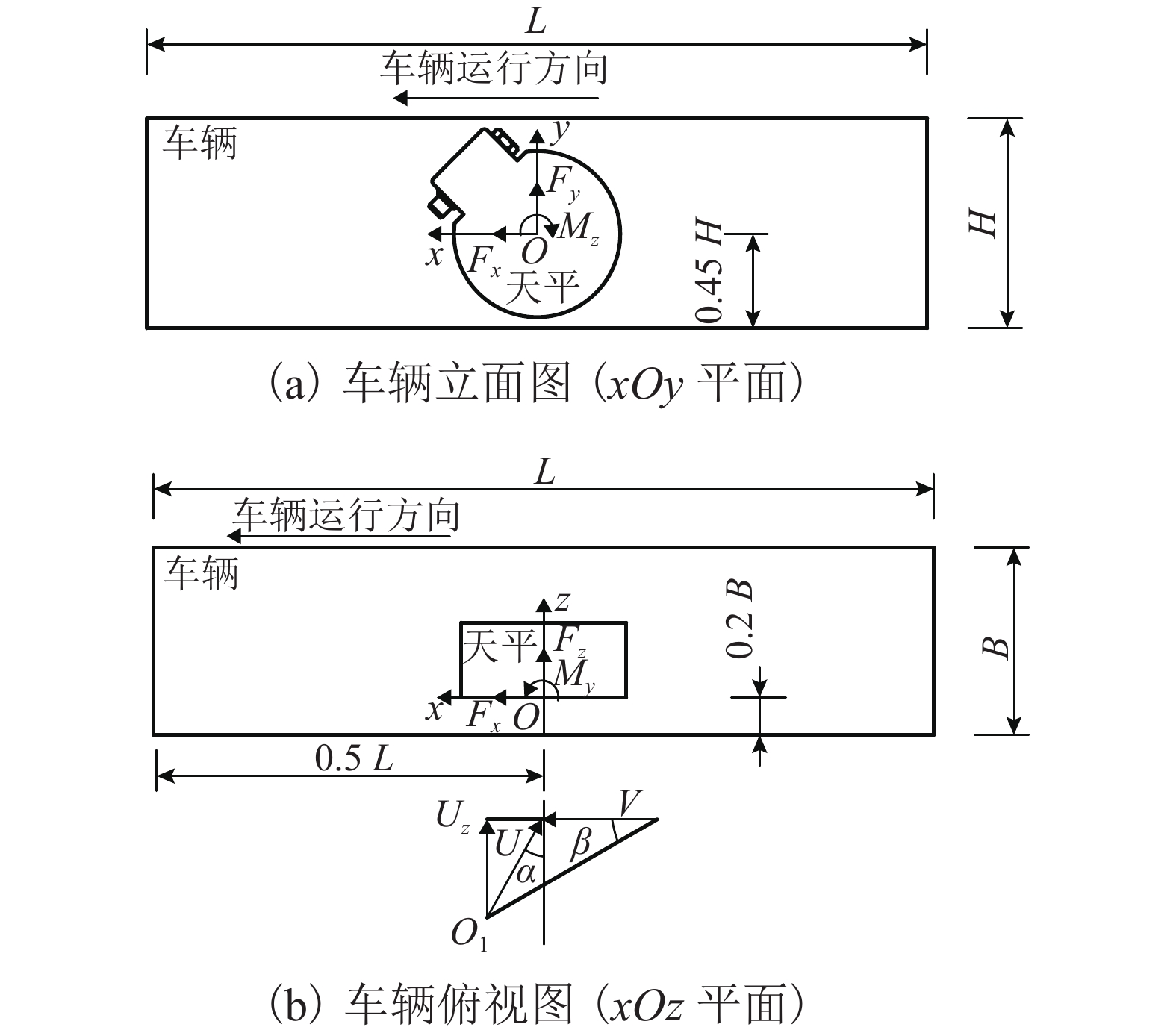
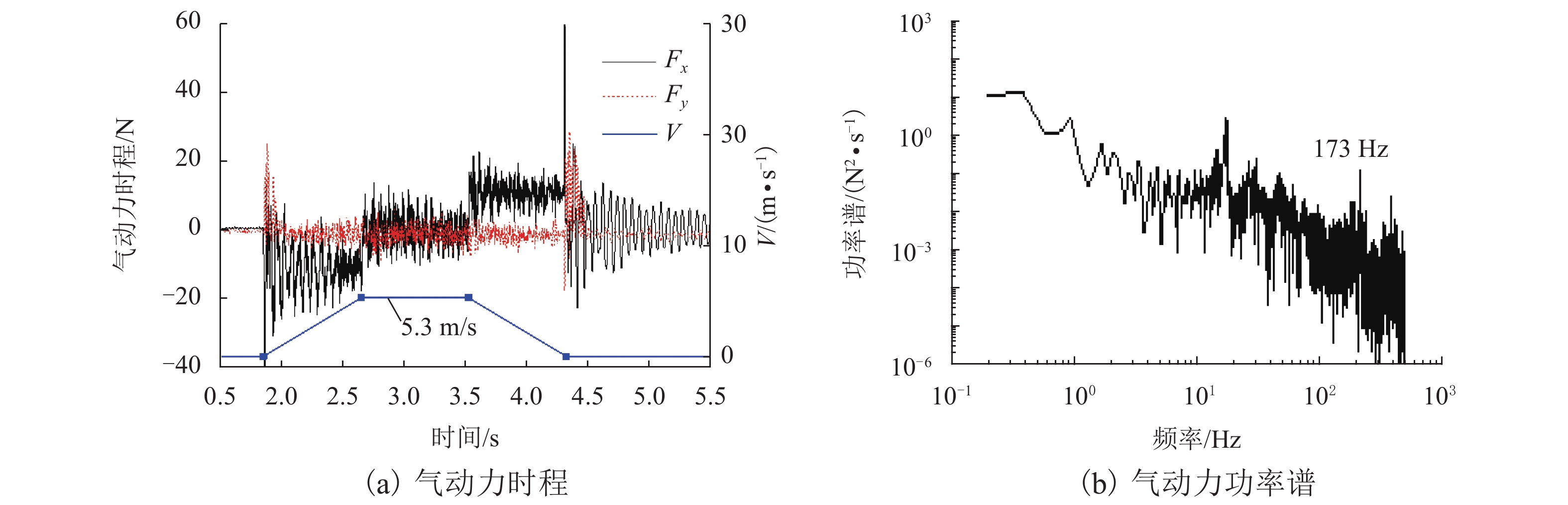
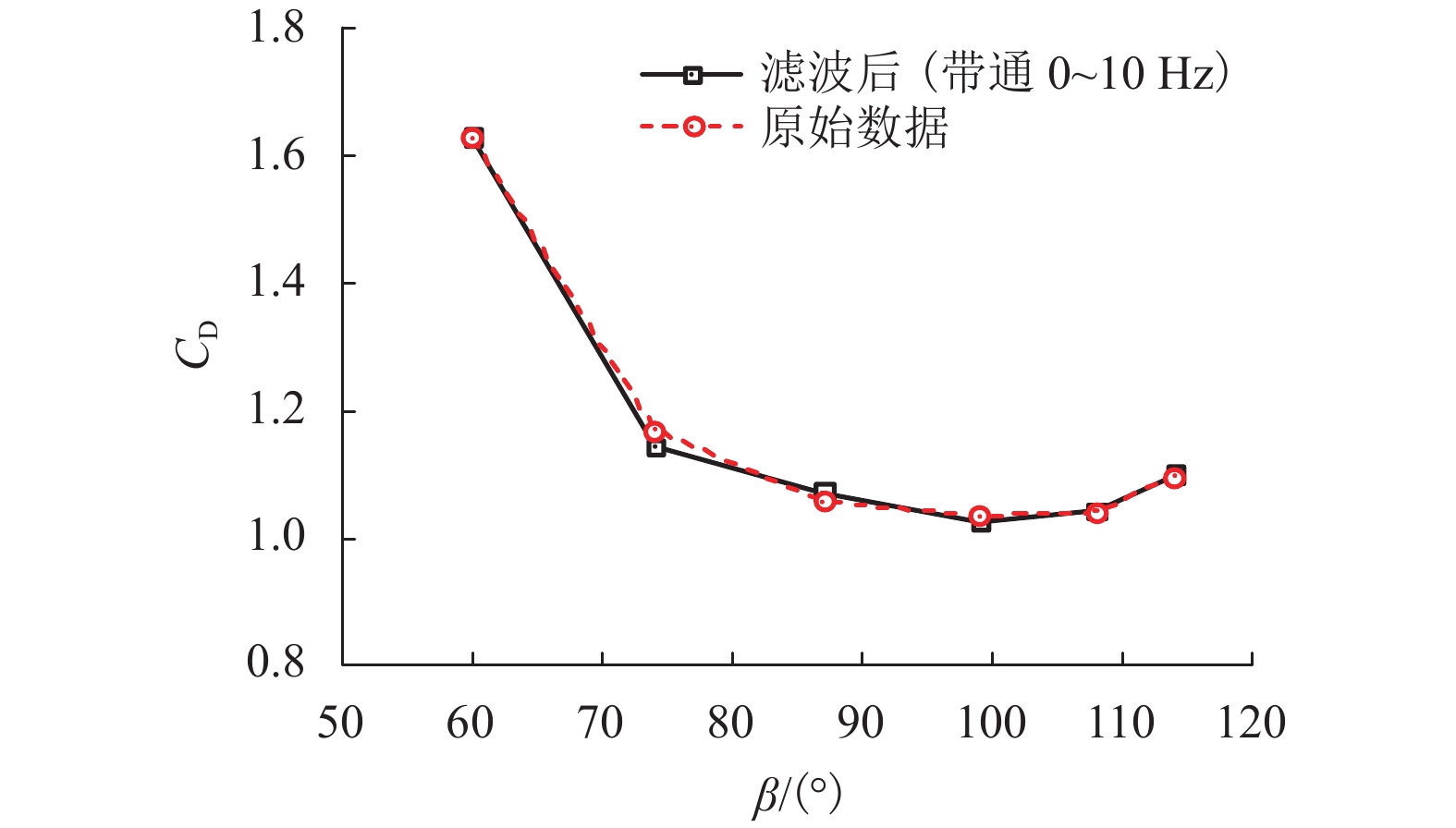
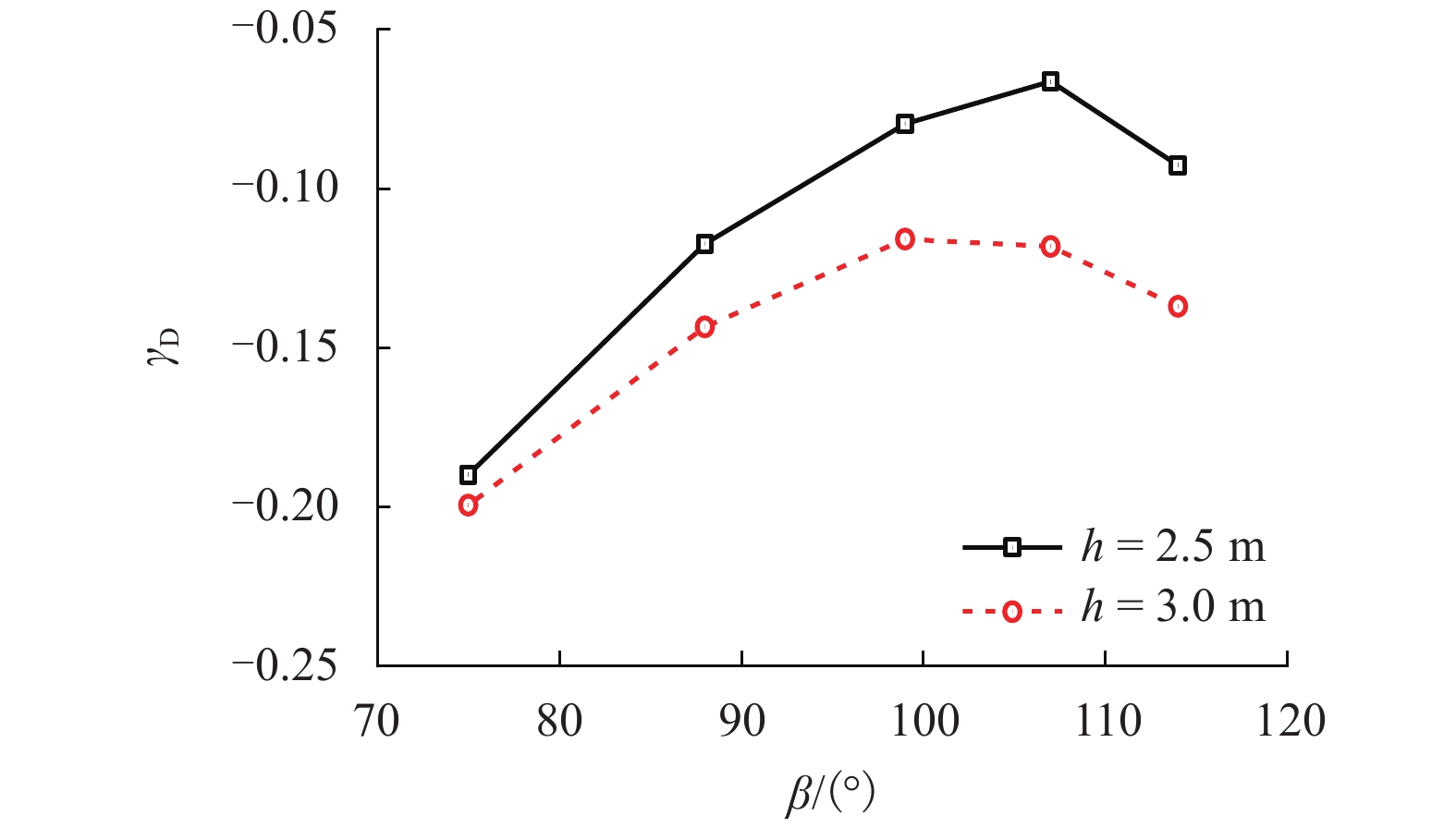
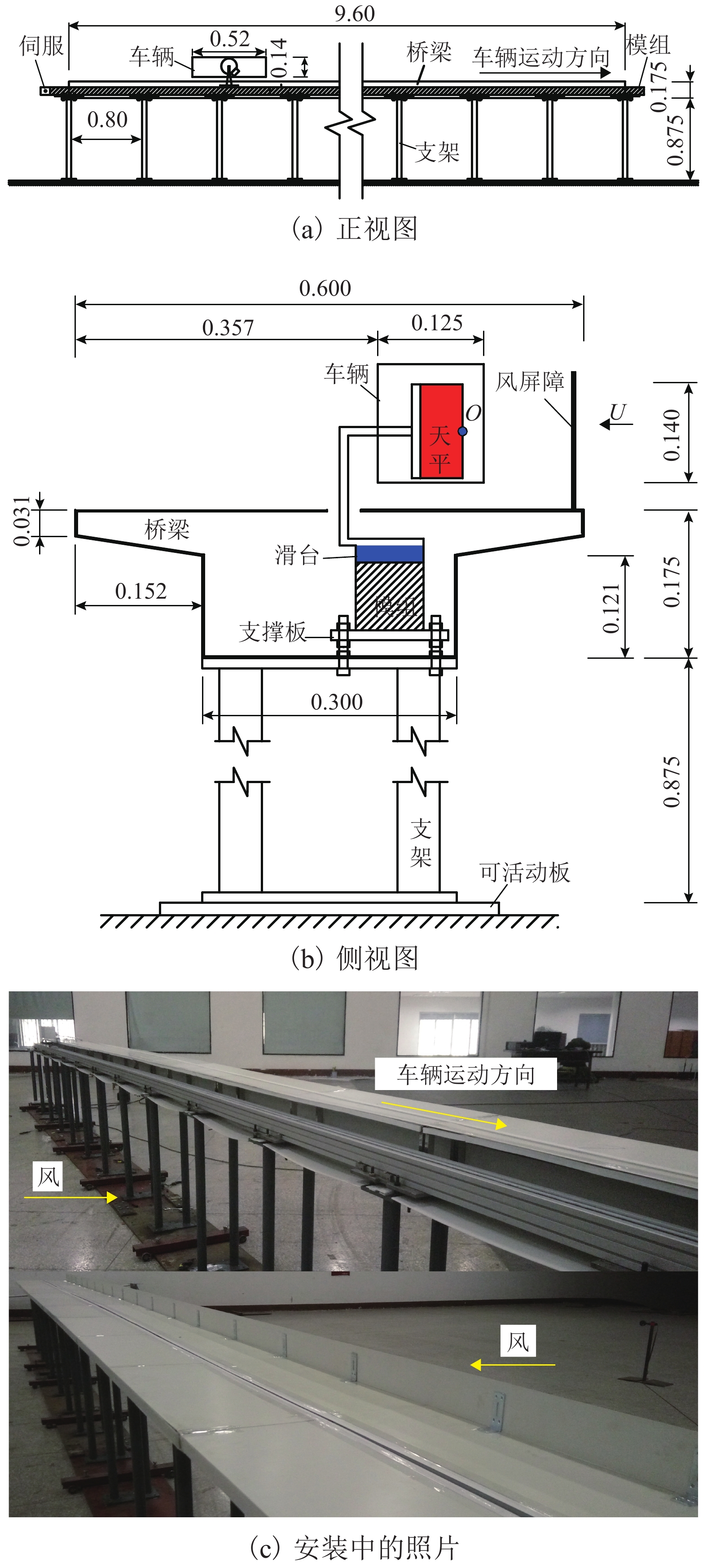
顺向斜风对行车安全的影响不容忽略,为考查顺向斜风对运动车辆气动特性的影响,采用移动车辆模型风洞试验装置,针对缩尺比为1/20的车辆和桥梁模型,测试了顺向斜风作用下运动车辆的气动特性,讨论了风速、风向和风屏障等因素对移动车辆气动特性的影响. 结果表明:移动车辆的五分力系数在不同风速时吻合较好;侧向阻力系数、升力系数和点头力矩系数随着合成风偏角的增大而减小;风偏角较小时,风向角对车辆的升力系数有较明显的影响;风屏障使车辆的气动力系数接近0,且明显地改变了车辆气动力系数随风偏角的变化规律;设置风屏障后,车辆阻力系数的变化率受风偏角、车速和风速等条件的影响.
Abstract:The effect of skew tail-wind on driving safety cannot be ignored. To investigate the effect of skew tail-wind, the aerodynamic characteristics of the vehicle under the action of skew tail-wind were tested by using a wind tunnel test device of the moving vehicle model, aiming at the vehicle and bridge models with the scale ratio of 1/20. The effects of wind speed, wind direction and wind barrier on the aerodynamic characteristic of moving vehicle were discussed. The results show that the five-component coefficients of moving vehicle well agree with different wind speeds. The lateral drag coefficient, lift coefficient and nodding moment coefficient decrease with the increase of the yaw angle. The skew tail-wind has a significantly effect on the lift coefficients when the yaw angle is small. The wind barrier makes the aerodynamic characteristics of the vehicle close to 0, but it obviously transforms the change law of the aerodynamic coefficient of the vehicle with the yaw angle. After the wind barrier is installed, the change rate of drag coefficient of vehicle is affected by the yaw angle, vehicle speed and wind speed.
-
Key words:
- moving vehicle model /
- wind tunnel test /
- skew tail-wind /
- aerodynamic characteristic /
- wind barrier
-
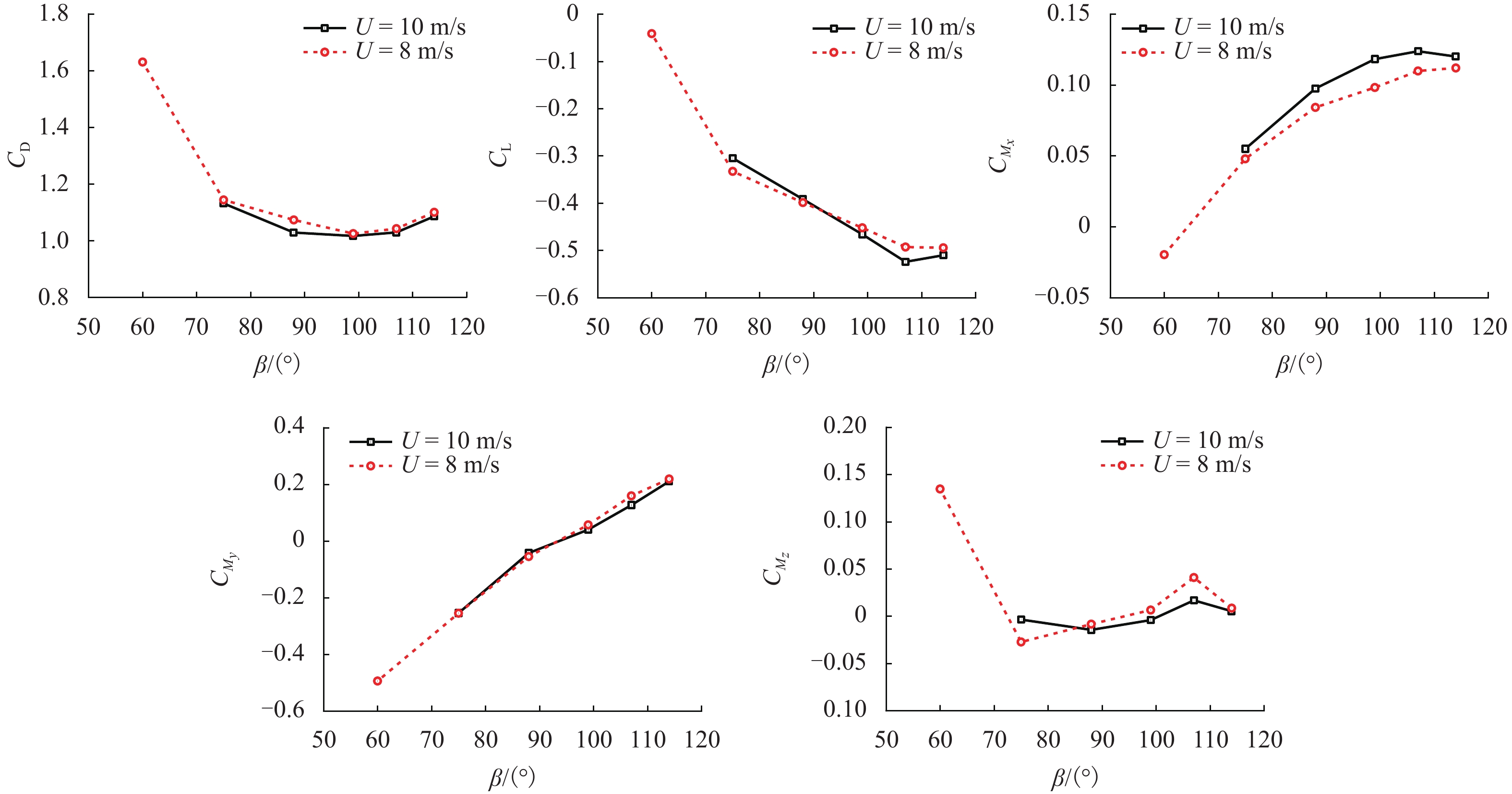
图 5 不同风速时的车辆五分力系数
Figure 5. Five-component coefficients of vehicle in various wind speeds
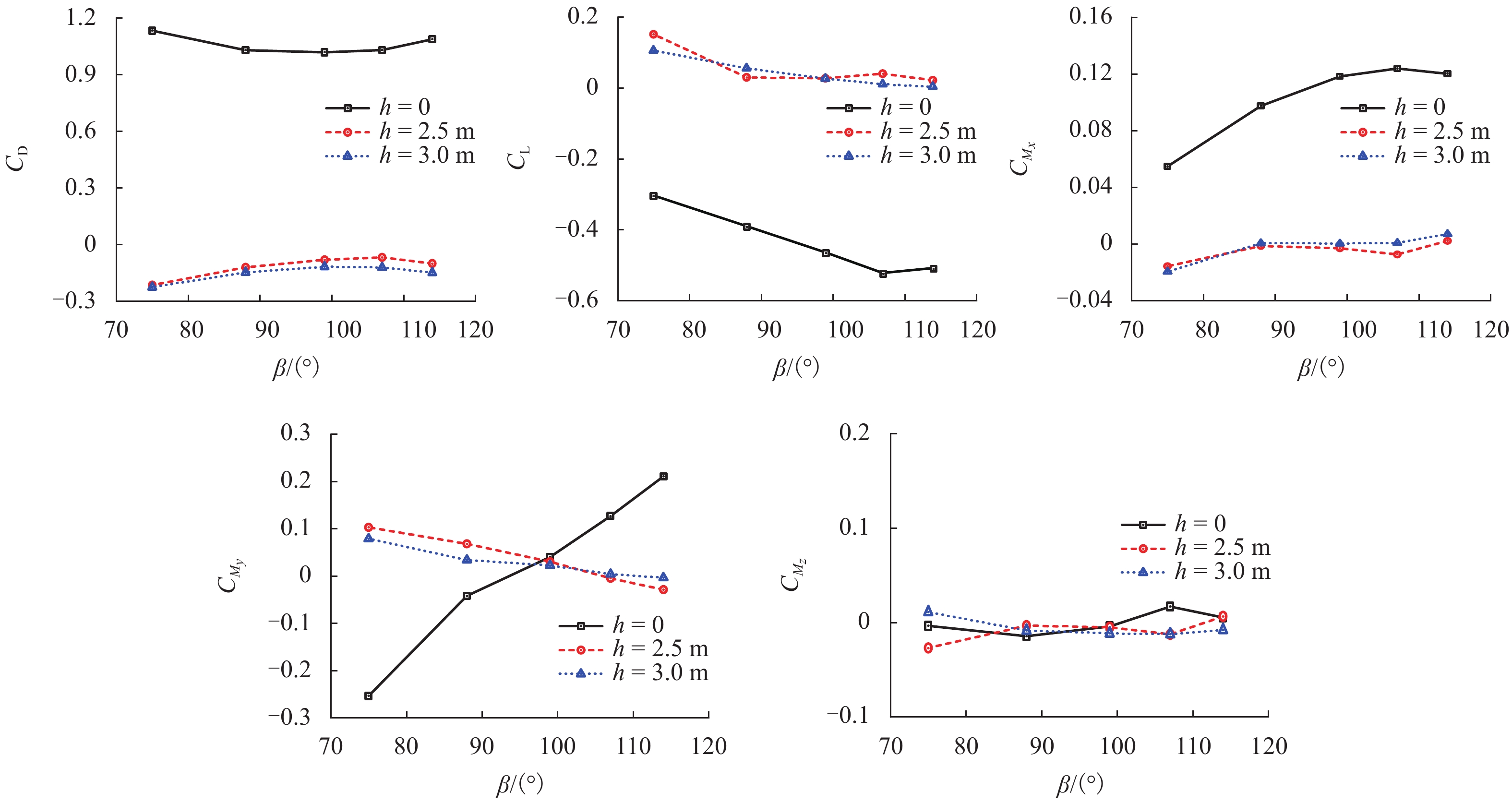
图 6 不同风屏障高度时车辆的五分力系数
Figure 6. Five-component coefficients of vehicle under different wind barrier heights
表 1 不同风向时的车辆五分力系数
Table 1. Five-component coefficients of vehicle under different wind directions
β/(°) α/(°) CD CL $C_{M_x} $ $C_{M_y} $ $C_{M_{\textit{z}}}$ 60 0 1.46 −0.43 0.07 −0.38 −0.03 30 1.63 −0.04 −0.02 −0.49 0.13 75 0 1.25 −0.47 0.09 −0.21 −0.08 74 30 1.14 −0.33 0.05 −0.25 −0.03 85 0 1.26 −0.45 0.10 −0.05 −0.03 87 30 1.07 −0.40 0.08 −0.05 −0.01  下载: 导出CSV
下载: 导出CSV
-
[1] 肖军,李小珍,刘德军. 高速列车运行对铁路简支箱梁空气动力特性的影响[J]. 铁道建筑,2015,55(11): 1-5. doi: 10.3969/j.issn.1003-1995.2015.11.01XIAO Jun, LI Xiaozhen, LIU Dejun. Influence of high speed train running on aerodynamic characteristics of railway simple-supported box-girder[J]. Railway Engineering, 2015, 55(11): 1-5. doi: 10.3969/j.issn.1003-1995.2015.11.01 [2] 李永乐,蔡宪棠,唐康,等. 深切峡谷桥址区风场空间分布特性的数值模拟研究[J]. 土木工程学报,2011,44(2): 116-122.LI Yongle, CAI Xiantang, TANG Kang, et al. Study of spatial distribution feature of wind fields over bridge site with a deep-cutting gorge using numerical simulation[J]. China Civil Engineering Journal, 2011, 44(2): 116-122. [3] 张明金,李永乐,唐浩俊,等. 高海拔高温差深切峡谷桥址区风特性现场实测[J]. 中国公路学报,2015,28(3): 60-65. doi: 10.3969/j.issn.1001-7372.2015.03.008ZHANG Mingjin, LI Yongle, TANG Haojun, et al. Field measurement of wind characteristics at bridge site in deep gorge with high altitude and high temperature difference[J]. China Journal of Highway and Transport, 2015, 28(3): 60-65. doi: 10.3969/j.issn.1001-7372.2015.03.008 [4] 韩艳,胡揭玄,蔡春声,等. 横风作用下考虑车辆运动的车桥系统气动特性的数值模拟研究[J]. 工程力学,2013,30(2): 318-325. doi: 10.6052/j.issn.1000-4750.2011.07.0475HAN Yan, HU Jiexuan, CAI Chunsheng, et al. Numerical simulation on aerodynamic characteristics of vehicles and bridges under cross winds with the consideration of vehicle moving[J]. Engineering Mechanics, 2013, 30(2): 318-325. doi: 10.6052/j.issn.1000-4750.2011.07.0475 [5] COLEMAN S A, BAKER C J. High sided road vehicles in cross winds[J]. Journal of Wind Engineering and Industrial Aerodynamics, 1990, 36: 1383-1392. doi: 10.1016/0167-6105(90)90134-X [6] 李永乐,陈宁,蔡宪棠,等. 桥塔遮风效应对风-车-桥耦合振动的影响[J]. 西南交通大学学报,2010,45(6): 875-881,887. doi: 10.3969/j.issn.0258-2724.2010.06.009LI Yongle, CHEN Ning, CAI Xiantang, et al. Wake effect of bridge tower on coupling vibration of wind-vehicle-bridge system[J]. Journal of Southwest Jiaotong University, 2010, 45(6): 875-881,887. doi: 10.3969/j.issn.0258-2724.2010.06.009 [7] 向活跃,李永乐,廖海黎. 基于DEA的铁路桥梁风屏障防风效果评价[J]. 西南交通大学学报,2012,47(4): 546-550,566. doi: 10.3969/j.issn.0258-2724.2012.04.002XIANG Huoyue, LI Yongle, LIAO Haili. DEA-based evaluation of wind shielding effect of wind barrier for railway bridges[J]. Journal of Southwest Jiaotong University, 2012, 47(4): 546-550,566. doi: 10.3969/j.issn.0258-2724.2012.04.002 [8] XIANG H Y, LI Y L, CHEN S R, et al. Wind loads of moving vehicle on bridge with solid wind barrier[J]. Engineering Structures, 2018, 156: 188-196. doi: 10.1016/j.engstruct.2017.11.009 [9] CHARUVISIT S, KIMURA K, FUJINO Y. Effects of wind barrier on a vehicle passing in the wake of a bridge tower in cross wind and its response[J]. Journal of Wind Engineering and Industrial Aerodynamics, 2004, 92(7/8): 609-639. [10] DORIGATTI F, STERLING M, BAKER C J, et al. Crosswind effects on the stability of a model passenger train:a comparison of static and moving experiments[J]. Journal of Wind Engineering and Industrial Aerodynamics, 2015, 138: 36-51. doi: 10.1016/j.jweia.2014.11.009 [11] 李永乐,胡朋,张明金,等. 侧向风作用下车-桥系统的气动特性——移动车辆模型风洞试验系统[J]. 西南交通大学学报,2012,47(1): 50-56. doi: 10.3969/j.issn.0258-2724.2012.01.009LI Yongle, HU Peng, ZHANG Mingjin, et al. Aerodynamic characteristics of vehicle-bridge system under cross wind:wind tunnel test system with moving vehicle model[J]. Journal of Southwest Jiaotong University, 2012, 47(1): 50-56. doi: 10.3969/j.issn.0258-2724.2012.01.009 [12] 何旭辉,邹云峰,杜风宇. 风屏障对高架桥上列车气动特性影响机理分析[J]. 振动与冲击,2015,34(3): 66-71.HE Xuhui, ZOU Yunfeng, DU Fengyu. Mechanism analysis of wind barrier’s effects on aerodynamic characteristics of a train on viaduct[J]. Journal of Vibration and Shock, 2015, 34(3): 66-71. [13] 韩艳,胡揭玄,蔡春声,等. 横风下车桥系统气动特性的风洞试验研究[J]. 振动工程学报,2014,27(1): 67-74. doi: 10.3969/j.issn.1004-4523.2014.01.010HAN Yan, HU Jiexuan, CAI Chunsheng, et al. Wind tunnel measurement on aerodynamic characteristics of vehicles and bridges under cross winds[J]. Journal of Vibration Engineering, 2014, 27(1): 67-74. doi: 10.3969/j.issn.1004-4523.2014.01.010 [14] 杨明智,袁先旭,鲁寨军,等. 强侧风下青藏线列车气动性能风洞试验研究[J]. 实验流体力学,2008,22(1): 76-79. doi: 10.3969/j.issn.1672-9897.2008.01.016YANG Mingzhi, YUAN Xianxu, LU Zhaijun, et al. Experimental study on aerodynamic characteristics of train running on Qinghai-Tibet railway under cross winds[J]. Journal of Experiments in Fluid Mechanics, 2008, 22(1): 76-79. doi: 10.3969/j.issn.1672-9897.2008.01.016 [15] SUZUKI M, TANEMOTO K, MAEDA T. Aerodynamic characteristics of train/vehicles under cross winds[J]. Journal of Wind Engineering and Industrial Aerodynamics, 2003, 91(1/2): 209-218. [16] 田红旗. 风环境下的列车空气阻力特性研究[J]. 中国铁道科学,2008,29(5): 108-112. doi: 10.3321/j.issn:1001-4632.2008.05.020TIAN Hongqi. Study on the characteristics of train air resistance under wind environment[J]. China Railway Science, 2008, 29(5): 108-112. doi: 10.3321/j.issn:1001-4632.2008.05.020 [17] XIANG H Y, LI Y L, CHEN S R, et al. A wind tunnel test method on aerodynamic characteristics of moving vehicles under crosswinds[J]. Journal of Wind Engineering and Industrial Aerodynamics, 2017, 163: 15-23. doi: 10.1016/j.jweia.2017.01.013 [18] 向活跃,李永乐,张明金,等. 侧风作用下移动车辆模型气动特性的试验方法[J]. 振动工程学报,2017,30(6): 976-982.XIANG Huoyue, LI Yongle, ZHANG Mingjin, et al. Test methods on aerodynamic characteristic of moving vehicle model under crosswinds[J]. Journal of Vibration Engineering, 2017, 30(6): 976-982. [19] 徐昕宇,李永乐,陈星宇,等. 风屏障的突风效应对桥上列车走行性的影响[J]. 西南交通大学学报,2020,56(5): 1050-1055, 1093.XU Xinyu, LI Yongle, CHEN Xingyu. et al. Impact of sudden change of the wind loads on running performance of vehicle on bridge with wind barriers[J]. Journal of Southwest Jiaotong University, 2020, 56(5): 1050-1055, 1093. [20] XIANG H Y, LI Y L, WANG B. Aerodynamic interaction between static vehicles and wind barriers on railway bridges exposed to crosswinds[J]. Wind and Structures, 2015, 20(2): 237-247. doi: 10.12989/was.2015.20.2.237 -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 665
- HTML全文浏览量: 370
- PDF下载量: 22
- 被引次数: 0