

Optimal Configuration of Wind-Solar-Hydrogen Multi-Energy Complementary Microgrid with Demand Side
-
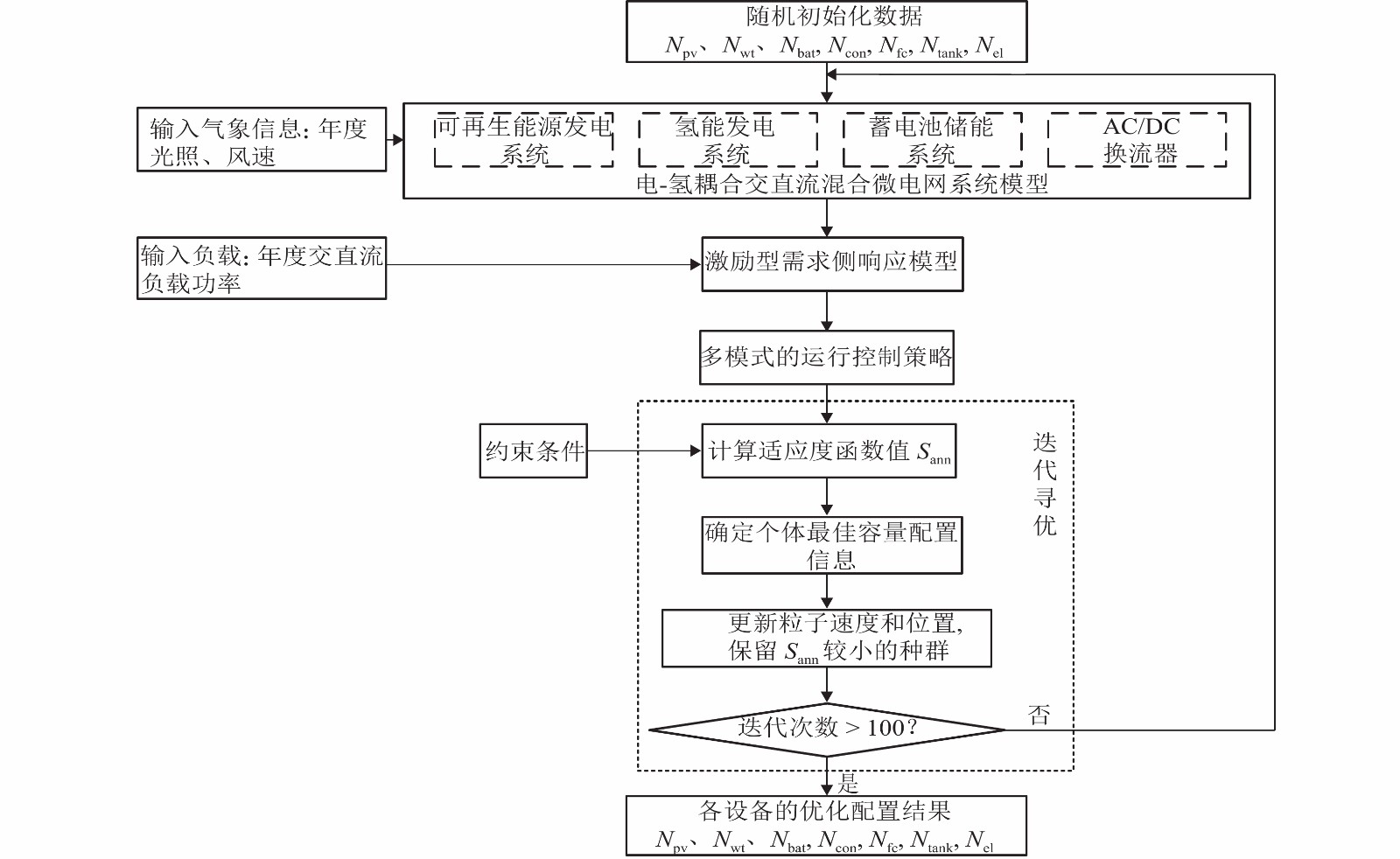
摘要: 针对多能互补微电网经济成本最优问题,提出一种计及需求侧响应的风-光-氢多能互补微电网优化配置方法. 首先,在相关功率约束和控制原则下制定运行控制策略;接着,为最大化直接消纳风光发电,引入激励型需求侧响应,利用混合整数规划优化负荷曲线;进而,建立考虑需求侧响应的优化配置模型,基于等年值成本最小的优化目标,综合考虑系统的必要约束条件,利用粒子群算法迭代寻优求解最优配置. 为验证有效性,结合某一地区的历史数据,求解优化配置方案,并开展微电网不同运营方式、自平衡率约束与建设成本影响因素下的技术经济分析. 分析结果表明:引入氢能发电系统和考虑需求侧响应后,当自平衡率为81.64%时,达到等年值成本最低为314.37万元;将自平衡率控制在合理水平,随着科技发展建设成本的降低均有助于提高微电网经济效益.Abstract: To optimize the economic cost of multi-energy complementary microgrid, an optimal configuration method is proposed for the wind-solar-hydrogen multi-energy complementary microgrid with demand-side response. First, the operation control strategy is formulated under the relevant power constraints and control principles. Then, in order to maximize the direct consumption of wind and solar power, an incentive demand-side response is introduced, and the mixed integer programming is used to optimize the load curve. Further the optimal configuration model with the demand-side response is established: with the minimum annual cost as the optimization goal and the requisite constraints of the system, the particle swarm optimization is used to iteratively find the optimal configuration. In order to verify the model, the historical data of a certain area is utilized to solve the optimal configuration scheme, and the technical and economic analysis is carried out under different operating modes of microgrid, the self-balance rate constraint and influencing factors of construction cost. The analysis results show that by introducing the hydrogen energy power generation system and considering the demand-side response, when the self-balancing rate is 81.64%, the minimum cost to reach the equivalent annual value is 3.143 million yuan; the self-balancing rate is controlled at a reasonable level, and the cost reduction promoted by the technology advancement will help to improve the economic benefits of the microgrid.
-
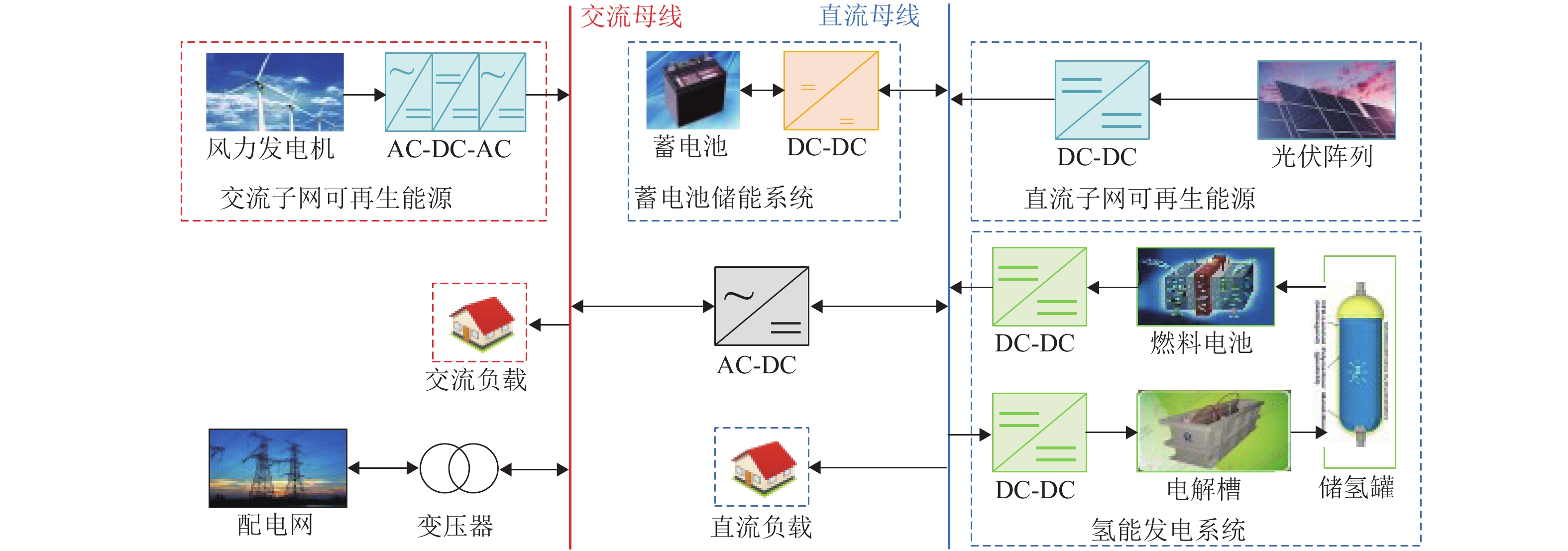
图 1 风-光-氢多能互补微电网系统拓扑结构
Figure 1. Topological structure of wind-solar-hydrogen multi-energy complementary AC/DC microgrid
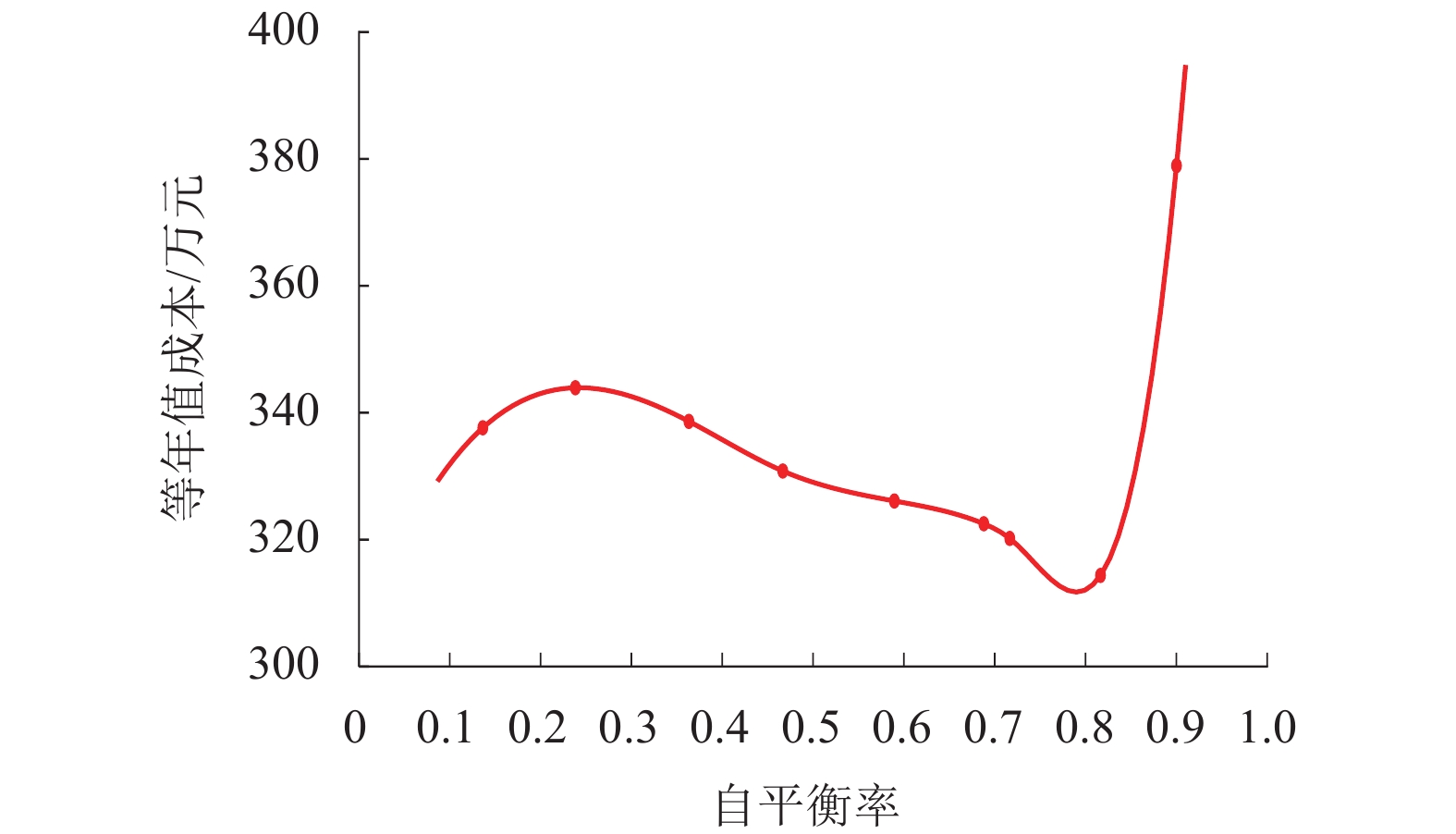
图 5 不同自平衡率约束对等年值成本的影响
Figure 5. Effect of different self-balance rate constraints on equivalent annual cost
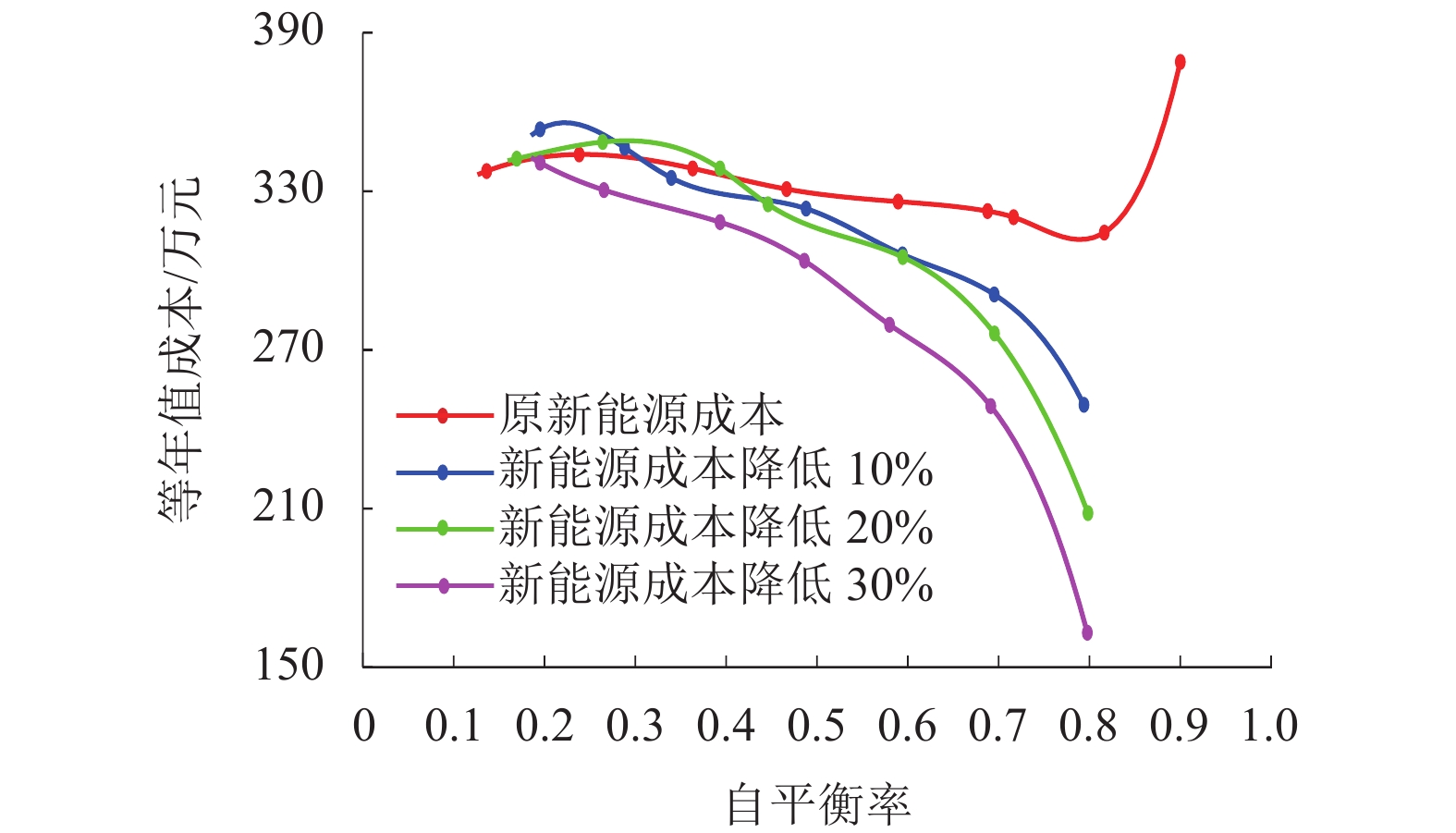
图 6 降低新能源设备成本对等年值成本的影响
Figure 6. Effect of reducing new energy costs on equivalent annual costs
表 1 不同设备的成本参数
Table 1. Cost parameters of different equipment
设备 相关参数 数值 设备 相关参数 数值 光伏 额定功率/kW 1 燃料电池 额定功率/kW 1 初始投资成本/(元•kW−1) 8 800 初始投资成本/(元•kW−1) 14 000 寿命/a 20 寿命/a 10 风机 额定功率/kW 10 储氢罐 容量/(kW•h) 1 初始投资成本/(元•kW−1) 12 000 初始投资成本/(元•(kW•h)−1) 1 800 寿命/a 20 寿命/a 20 蓄电池 容量/(A•h) 85 电解槽 额定功率/kW 1 最大电压/V 12 初始投资成本/(元•kW−1) 20 000 初始投资成本/(元•(kW•h)−1) 1 000 寿命/a 10 换流器 额定功率/kW 1 初始投资成本/(元•kW−1) 2 000 寿命/a 10  下载: 导出CSV
下载: 导出CSV
表 2 分时电价数据
Table 2. Time-of-use electricity price
时段
类型具体时段 购电价格/
(元•(kW•h)−1)售电价格/
(元•(kW•h)−1)低谷 00:00~08:00 0.37 0.28 尖峰 08:00~12:00,
17:00~21:000.87 0.72 高峰 12:00~17:00,
21:00~24:000.69 0.53
下载: 导出CSV
表 3 不同运营方式
Table 3. Different modes of operation
运营方式 是否考虑氢能
发电系统是否考虑负荷
需求侧响应方式一 否 否 方式二 是 否 方式三 是 是
下载: 导出CSV
表 4 不同运营方式下的优化配置方案
Table 4. Optimized configuration schemes in different modes of operation
运营
方式方案 光伏/
台风机/
台蓄电
池/个换流
器/台燃料电
池/个储氢
罐/个电解
槽/个等年值成
本/万元总换流损
耗/MW自平衡
率/%用电满
意度/%用户满
意度/%方式一 1 800 57 210 729 0 0 0 316.11 150.85 74.06 100.00 87.03 2 575 71 211 723 0 0 0 315.37 142.57 76.52 100.00 88.26 方式二 3 750 62 158 687 3 6 3 314.62 147.76 75.40 100.00 87.70 4 594 87 112 704 3 25 3 314.49 141.22 80.12 100.00 90.06 方式三 5 743 60 82 648 2 5 2 314.39 146.22 79.65 89.01 84.33 6 537 74 81 649 2 4 2 312.99 139.60 82.46 91.43 86.95
下载: 导出CSV
表 5 不同自平衡率约束范围内的优化配置方案
Table 5. Optimized configuration schemes within constraints of different self-balance rates
方案 自平衡率范围 光伏/台 风机/台 蓄电池/个 换流器/台 燃料电池/个 储氢罐/个 电解槽/个 等年值成本/万元 Ⅰ 0.1~0.2 79 6 42 724 2 5 2 337.63 Ⅱ 0.2~0.3 131 13 143 782 3 309 2 343.94 Ⅲ 0.3~0.4 232 21 113 935 3 12 3 338.64 Ⅳ 0.4~0.5 325 28 150 807 3 16 3 330.82 Ⅴ 0.5~0.6 463 38 198 704 4 195 4 326.10 Ⅵ 0.6~0.7 517 52 271 707 5 57 5 322.51 Ⅶ 0.7~0.8 645 55 102 800 7 32 7 320.20 Ⅷ 0.8~0.9 832 86 51 777 2 6 2 314.37 Ⅸ 0.9~1.0 970 368 209 697 4 485 22 378.93
下载: 导出CSV
-
李宏仲,吕梦琳,胡列翔,等. 第24届国际供电会议研究成果综述——微电网的规划与运行[J]. 电网技术,2019,43(4): 1465-1471.LI Hongzhong, LYU Menglin, HU Liexiang, et al. Review of CIRED 2017 on microgrid planning and operation[J]. Power System Technology, 2019, 43(4): 1465-1471. 陈维荣,于瑾,李奇,等. 电-氢多能互补型微电网的VSG平衡电流控制方法[J]. 西南交通大学学报,2019,54(6): 1323-1331.CHEN Weirong, YU Jin, LI Qi, et al. Balanced current control method for virtual synchronous generator in electro-hydrogen multi-energy complementary microgrid[J]. Journal of Southwest Jiaotong University, 2019, 54(6): 1323-1331. DUAN J, YI Z, SHI D, et al. Reinforcement-learning- based optimal control of hybrid energy storage systems in hybrid AC-DC microgrids[J]. IEEE Transactions on Industrial Informatics, 2019, 15(9): 5355-5364. doi: 10.1109/TII.2019.2896618 YANG H, LI S, LI Q, et al. Hierarchical distributed control for decentralized battery energy storage system based on consensus algorithm with pinning node[J]. Protection and Control of Modern Power Systems, 2018, 3: 1-9. doi: 10.1186/s41601-018-0081-5 刘畅,卓建坤,赵东明,等. 利用储能系统实现可再生能源微电网灵活安全运行的研究综述[J]. 中国电机工程学报,2020,40(1): 1-18, 369.LIU Chang, ZHUO Jiankun, ZHAO Dongming, et al. A review on the utilization of energy storage system for the flexible and safe operation of renewable energy microgrids[J]. Proceedings of the CSEE, 2020, 40(1): 1-18, 369. 李奇,蒲雨辰,韩莹,等. 电-氢孤岛直流微电网的分层能量管理[J]. 西南交通大学学报,2020,55(5): 912-919.LI Qi, PU Yuchen, HAN Ying, et al. Hierarchical energy management for electric-hydrogen island direct current micro-grid[J]. Journal of Southwest Jiaotong University, 2020, 55(5): 912-919. 蒲雨辰,李奇,陈维荣,等. 计及最小使用成本及储能状态平衡的电-氢混合储能孤岛直流微电网能量管理[J]. 电网技术,2019,43(3): 918-927.PU Yuchen, LI Qi, CHEN Weirong, et al. Energy management for islanded DC microgrid with hybrid electric-hydrogen energy storage system based on minimum utilization cost and energy storage state balance[J]. Power System Technology, 2019, 43(3): 918-927. YAMASHITA D, TSUNO K, KOIKE K, et al. Distributed control of a user-on-demand renewable-energy power-source system using battery and hydrogen hybrid energy-storage devices[J]. International Journal of Hydrogen Energy, 2019, 44(50): 27542-27552. doi: 10.1016/j.ijhydene.2019.08.234 MARCHENKO O V, SOLOMIN S V. Modeling of hydrogen and electrical energy storages in wind/PV energy system on the Lake Baikal coast[J]. International Journal of Hydrogen Energy, 2017, 42(15): 9361-9370. doi: 10.1016/j.ijhydene.2017.02.076 ZHANG Z, ZHOU J, ZONG Z, et al. Development and modelling of a novel electricity-hydrogen energy system based on reversible solid oxide cells and power to gas technology[J]. International Journal of Hydrogen energy, 2019, 44(52): 28305-28315. doi: 10.1016/j.ijhydene.2019.09.028 HAMAD A A, NASSAR M E, EL-SAADANY E F, et al. Optimal configuration of isolated hybrid AC/DC microgrids[J]. IEEE Transactions on Smart Grid, 2019, 10(3): 2789-2798. doi: 10.1109/TSG.2018.2810310 潘文霞,李建成,方坤豪. 考虑补贴的独立微网容量配置优化方法[J]. 电网技术,2018,42(7): 2206-2213.PAN Wenxia, LI Jiancheng, FANG Kunhao. Optimization method of capacity configuration of standalone microgrid considering subsidy[J]. Power System Technology, 2018, 42(7): 2206-2213. WANG H, WANG T, XIE X, et al. Optimal capacity configuration of a hybrid energy storage system for an isolated microgrid using quantum-behaved particle swarm optimization[J]. Energies, 2018, 11(2): 454. doi: 10.3390/en11020454 于东霞,张建华,王晓燕,等. 并网型风光储互补发电系统容量优化配置[J]. 电力系统及其自动化学报,2019,31(10): 59-65.YU Dongxia, ZHANG Jianhua, WANG Xiaoyan, et al. Optimization of system capacity in grid-connected wind/PV/storage hybrid system[J]. Proceedings of the CSU-EPSA, 2019, 31(10): 59-65. 汪湘晋,赵波,吴红斌,等. 并网型交直流混合微电网优化配置分析[J]. 电力系统自动化,2016,40(13): 55-62. doi: 10.7500/AEPS20151105005WANG Xiangjin, ZHAO Bo, WU Hongbin, et al. Optimal sizing analysis of grid-connected hybrid AC-DC microgrid[J]. Automation of Electric Power Systems, 2016, 40(13): 55-62. doi: 10.7500/AEPS20151105005 李鹏,华浩瑞,陈安伟,等. 基于二层规划模型的交直流混合微网源荷储协调分区优化经济调度[J]. 中国电机工程学报,2016,36(24): 6769-6779,6931.LI Peng, HUA Haorui, CHEN Anwei, et al. Source-load-storage coordination partition optimal economic operation of AC/DC hybrid microgrid based on bilevel programming model[J]. Proceedings of the CSEE, 2016, 36(24): 6769-6779,6931. 李姚旺,苗世洪,刘君瑶,等. 考虑需求响应不确定性的光伏微电网储能系统优化配置[J]. 电力系统保护与控制,2018,46(20): 69-77. doi: 10.7667/PSPC171431LI Yaowang, MIAO Shihong, LIU Junyao, et al. Optimal allocation of energy storage system in PV micro grid considering uncertainty of demand response[J]. Power System Protection and Control, 2018, 46(20): 69-77. doi: 10.7667/PSPC171431 -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 1077
- HTML全文浏览量: 421
- PDF下载量: 69
- 被引次数: 0