

Simplified Analysis Method for Deflection of Thin-Walled Box Girder
-
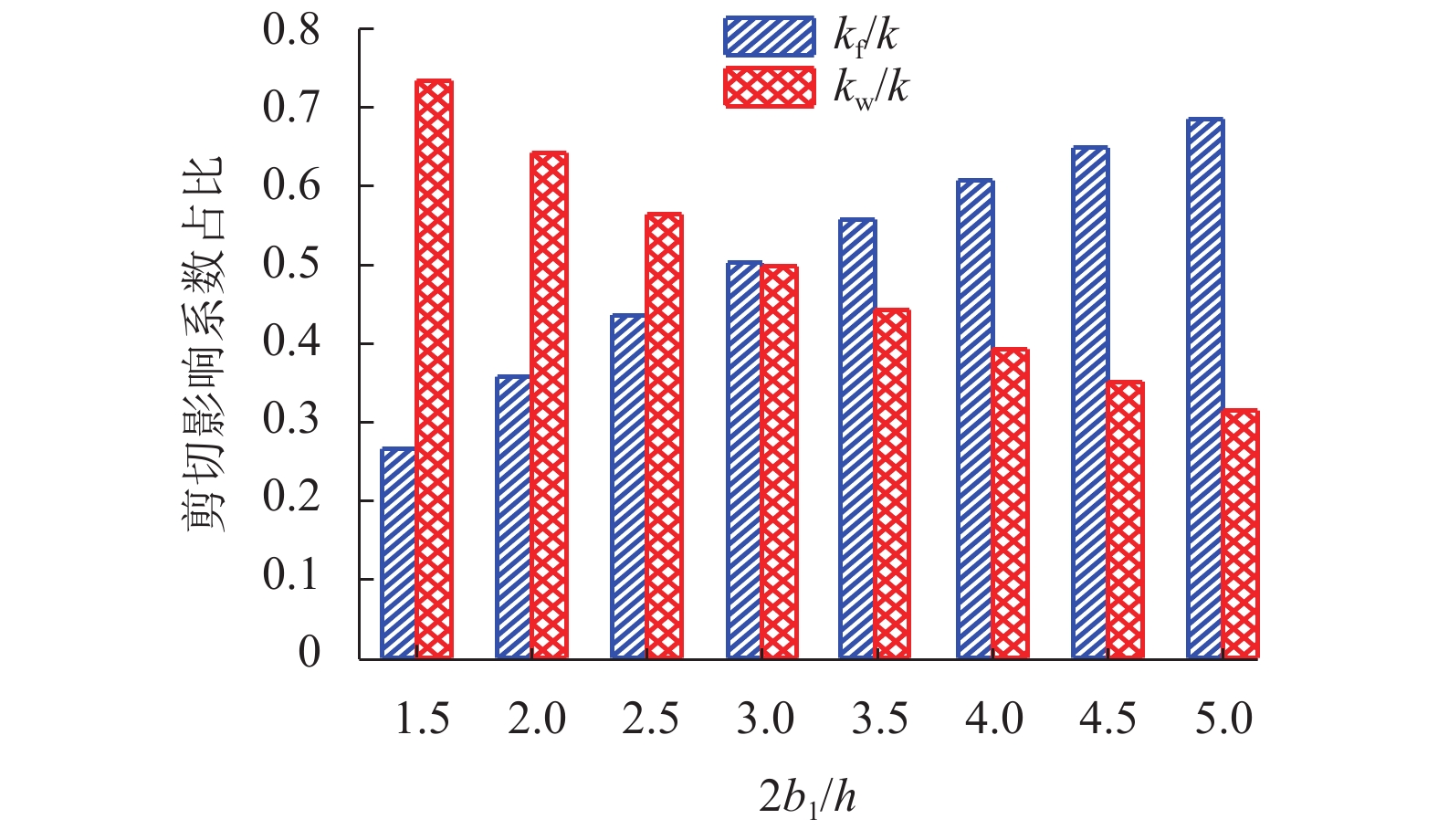
摘要: 为寻求考虑剪切变形影响的薄壁箱梁挠度计算简化方法,以单位力法为基础分析薄壁箱梁的挠曲变形. 首先,通过对薄壁箱梁挠曲剪应力分布模式的分析获取组成箱梁各壁板的剪切影响系数表达式,基于该剪切影响系数,利用Timoshenko梁理论导出简单箱梁挠度的解析表达式;其次,利用卡式第二定律推导出箱梁的梁段单元分析模型,编制了求解变截面箱梁等复杂结构的电算程序;最后,对等截面及变截面箱梁的算例模型进行了分析. 数值算例结果表明:程序计算的挠度与实测值及ANSYS空间有限元结果误差在3%以内;针对数值算例,剪切变形使箱梁挠度增大20%以上;随着宽高比的增大,翼板剪切产生的附加挠度会增大,而腹板情况与之相反.Abstract: In order to find a simplified method for calculating the deflection of the thin-walled box girder under the influence of shear deformation, the flexural deformation of the thin-walled box girder is analyzed on the basis of the unit force method. Firstly, by analyzing the distribution mode of the flexural shear stress of the thin-walled box girder, the expressions for the shear influence coefficients of each wallboard constituting the box girder are derived. With the shear influence coefficient, the analytical expression of the simple box girder deflection can be deduced by using Timoshenko beam theory. Secondly, the beam segment analysis model of the box girder is built by using the Castingliano’s second theorem and the program is compiled for solving the complex structure such as the box girder with variable sections. Finally, the example models of the box girders with constant and variable sections are analyzed. The results of numerical examples show that the error between the deflection calculated by the program and the measured and the ANSYS finite element results is within 3%. For the numerical example, the deflection of the box girder is increased by more than 20% due to the shear deformation. Parametric analysis also indicate that the additional deflection caused by the shearing of the flange increases with the width-to-height ratio, whereas for the web, the case is the opposite.
-
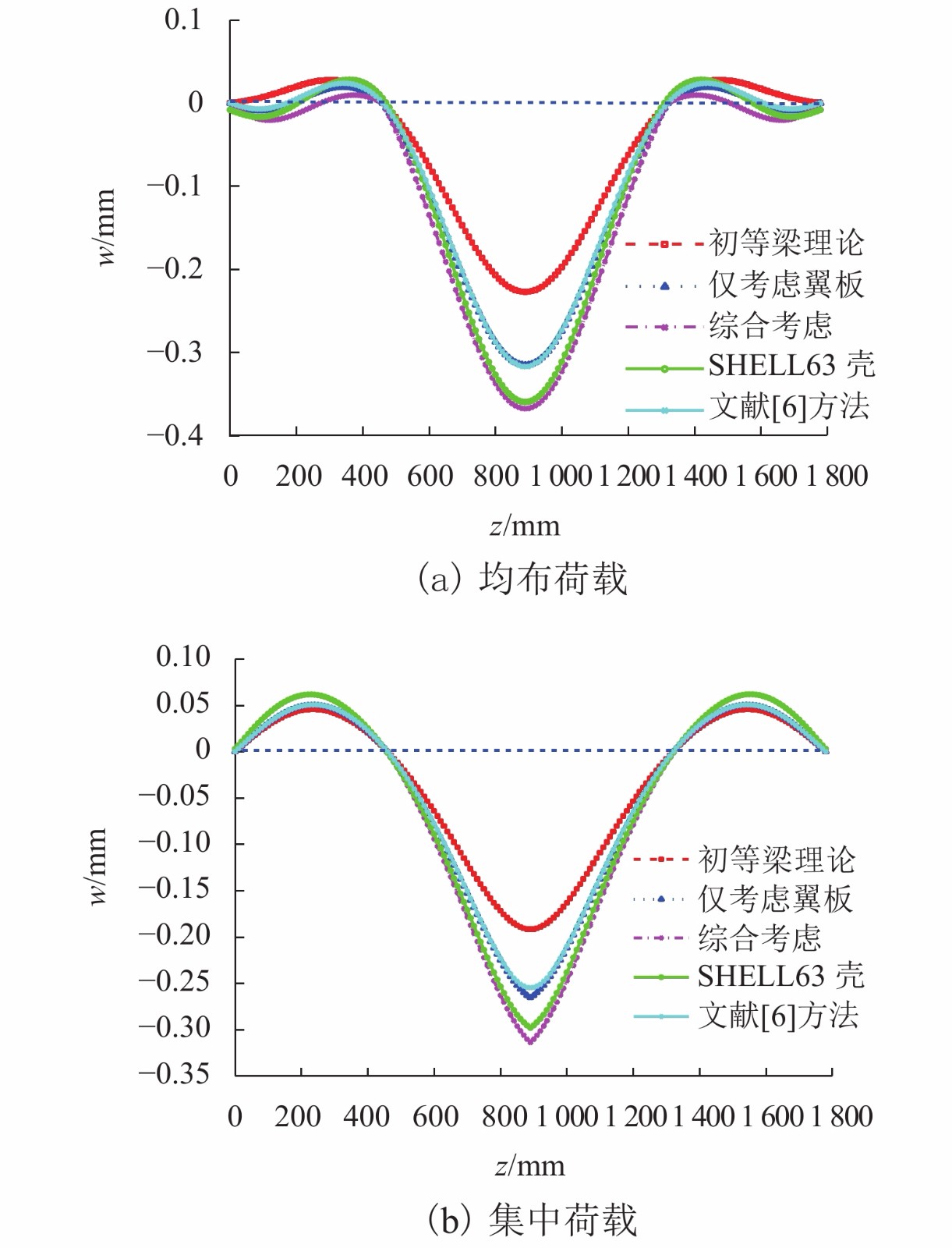
表 2 跨中截面处挠度分析
Table 2. Mid-span deflection analysis
荷载 vc/mm vf/mm vw/mm (vf•vc−1)/% (vw•vc−1)/% 均布 0.228 0.087 0.072 38 32 集中 0.193 0.073 0.049 38 25  下载: 导出CSV
下载: 导出CSV
-
楼庄鸿. 大跨径梁式桥的主要病害[J]. 公路交通科技,2006,23(4): 84-87. doi: 10.3969/j.issn.1002-0268.2006.04.021LOU Zhuanghong. Main faults in large span beam bridges[J]. Journal of Highway and Transportation Research and Development, 2006, 23(4): 84-87. doi: 10.3969/j.issn.1002-0268.2006.04.021 陈宇峰,徐君兰,余武军. 大跨PC连续刚构桥跨中持续下挠成因及预防措施[J]. 重庆交通大学学报(自然科学版),2007,26(4): 6-8. doi: 10.3969/j.issn.1674-0696.2007.04.003CHEN Yufeng, XU Junlan, YU Wujun. Causes and precautionary measures to long-term deflection of long span prestressed concrete box girder of continuous rigid frame bridge[J]. Journal of Chongqing Jiaotong University (Natural Science), 2007, 26(4): 6-8. doi: 10.3969/j.issn.1674-0696.2007.04.003 李宏江,王荣霞,李万恒,等. 大跨径预应力混凝土箱梁的剪切变形分析[J]. 应用基础与工程科学学报,2012,20(2): 286-295. doi: 10.3969/j.issn.1005-0930.2012.02.012LI Hongjiang, WANG Rongxia, LI Wanheng, et al. Analysis on shearing deformation of long-span prestressed concrete box girders[J]. Journal of Basic Science and Engineering, 2012, 20(2): 286-295. doi: 10.3969/j.issn.1005-0930.2012.02.012 邵旭东,詹豪,雷薇,等. 超大跨径单向预应力UHPC连续箱梁桥概念设计与初步实验[J]. 土木工程学报,2013,46(8): 83-89.SHAO Xudong, ZHAN Hao, LEI Wei, et al. Conceptual design and preliminary experiment of super-long-span continuous box-girder bridge composed of one-way prestressed UHPC[J]. China Civil Engineering Journal, 2013, 46(8): 83-89. 郭金琼,房贞政,罗孝登. 箱形梁桥剪滞效应分析[J]. 土木工程学报,1983,16(1): 1-13.GUO Jinqiong, FANG Zhenzheng, LUO Xiaodeng. Analysis of shear lag effect in box girder bridges[J]. China Civil Engineering Journal, 1983, 16(1): 1-13. ZHANG Y H. Improved finite-segment method for analyzing shear lag effect in thin-walled box girders[J]. Journal of Structural Engineering, 2014, 138(10): 1279-1284. 中华人民共和国交通运输部. 公路钢筋混凝土及预应力混凝土桥涵设计规范: JTG 3362—2018[S]. 北京: 人民交通出版社, 2018. 蔺鹏臻,扬子江,冀伟,等. 考虑剪力滞效应影响的箱梁变形修正计算方法[J]. 中国公路学报,2013,26(1): 93-97. doi: 10.3969/j.issn.1001-7372.2013.01.013LIN Pengzhen, YANG Zijiang, JI Wei, et al. Modified calculation method of deflection for box girders with consideration of shear lag effect[J]. China Journal of Highway and Transport, 2013, 26(1): 93-97. doi: 10.3969/j.issn.1001-7372.2013.01.013 刘世忠,吴亚平,夏旻,等. 薄壁箱梁剪力滞剪切变形双重效应分析的矩阵方法[J]. 工程力学,2001,18(4): 140-144. doi: 10.3969/j.issn.1000-4750.2001.04.021LIU Shizhong, WU Yaping, XIA Min, et al. Matrix analysis of thin-walled box girders with both shear lag and shear deformation[J]. Engineering Mechanics, 2001, 18(4): 140-144. doi: 10.3969/j.issn.1000-4750.2001.04.021 韦成龙,李斌,曾庆元. 变截面连续箱梁桥剪力滞及剪切变形双重效应分析的传递矩阵法[J]. 工程力学,2008,25(9): 111-117.WEI Chenglong, LI Bin, ZENG Qingyuan. Transfer matrix method considering both shear lag effect and shear deformation effects in non-uniform continuous box girder[J]. Engineering Mechanics, 2008, 25(9): 111-117. 李夏元,郭靖宇,万水,等. 基于Timoshenko梁理论的薄壁箱梁剪力滞效应研究[J]. 公路交通科技,2018,35(6): 52-60.LI Xiayuan, GUO Jingyu, WAN Shui, et al. Analysis on shear lag effect of thin-walled box girder based on Timoshenko beam theory[J]. Journal of Highway and Transportation Research and Development, 2018, 35(6): 52-60. 周茂定,李丽园,张元海. 考虑剪切变形时薄壁箱梁的挠曲分析[J]. 工程力学,2015,32(10): 138-144. doi: 10.6052/j.issn.1000-4750.2014.04.0266ZHOU Maoding, LI Liyuan, ZHANG Yanhai. Flexural analysis of thin-walled box girders with shear deformation[J]. Engineering Mechanics, 2015, 32(10): 138-144. doi: 10.6052/j.issn.1000-4750.2014.04.0266 S. 铁木辛柯, J. 盖尔. 材料力学[M]. 胡人礼, 译. 北京: 科学出版社, 1978: 270-460. 周茂定. 考虑剪切变形影响的薄壁箱梁挠曲解析理论及其应用研究[D]. 兰州: 兰州交通大学, 2018. 郭金琼. 箱形梁设计理论[M]. 第2版. 北京: 人民交通出版社, 2008: 13-50. 吴鸿庆, 任侠. 结构有限元分析[M]. 北京: 中国铁道出版社, 2012: 8-44. 吴幼明,罗旗帜,岳珠峰. 变高度连续箱梁剪力滞效应试验研究[J]. 实验力学,2004,19(1): 85-90. doi: 10.3969/j.issn.1001-4888.2004.01.016WU Youming, LUO Qizhi, YUE Zhufeng. An experimental study on the shear lag effect of continuous box girder with varying depth[J]. Journal of Experimental Mechanics, 2004, 19(1): 85-90. doi: 10.3969/j.issn.1001-4888.2004.01.016 -

 下载:
下载:




 点击查看大图
点击查看大图

图(10) / 表(2)
计量
- 文章访问数: 657
- HTML全文浏览量: 498
- PDF下载量: 24
- 被引次数: 0