

Overtopping Failure of Moraine Dams under Action of Earthquake-Induced Resonant Water Surges
-
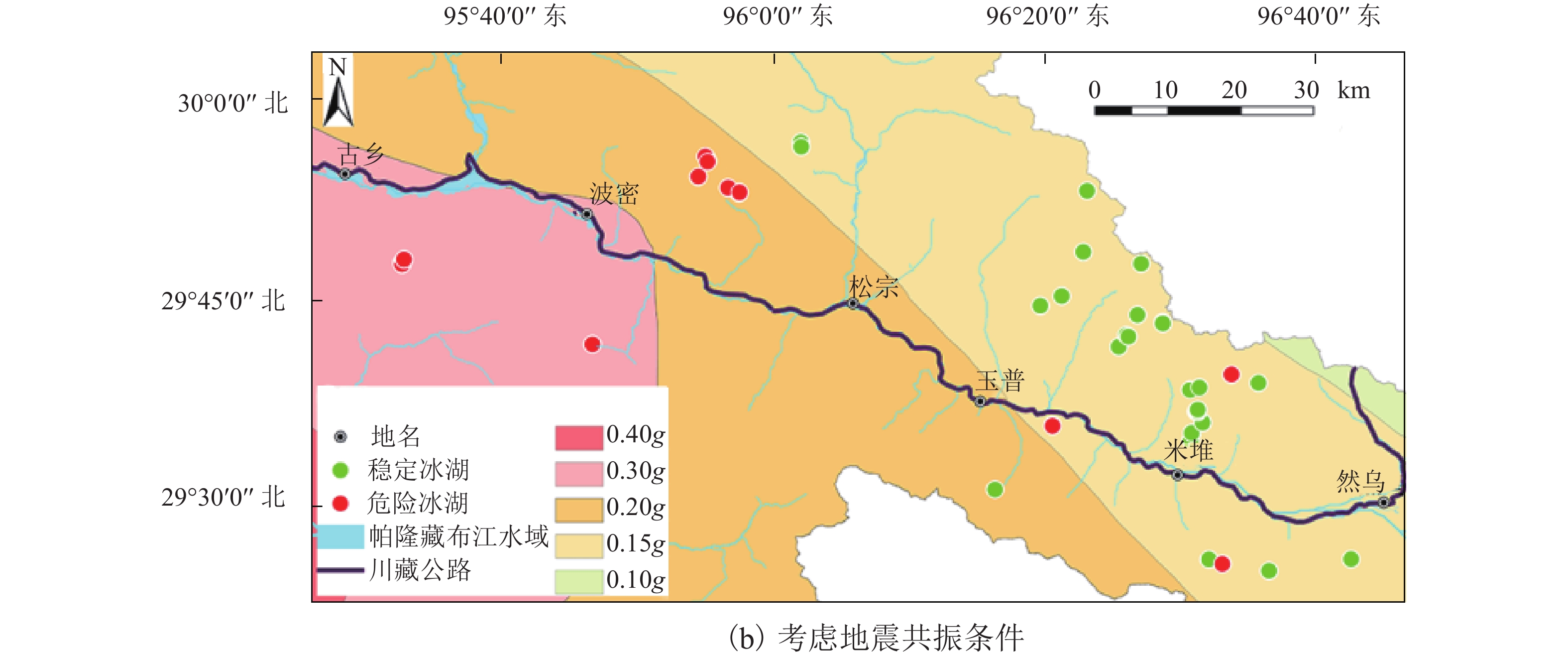
摘要: 为了研究冰碛坝在地震共振涌浪作用下的漫顶溃决机制,设计了振动台造波模型实验. 首先,通过对比实验获取了地震共振涌浪运动规律和最大波高的影响因素,并通过量纲分析建立了共振条件下涌浪最大波高计算公式;其次,依据非均匀沙起动临界水头高度与溃坝输沙临界水量条件,建立涌浪作用下堰塞坝漫顶溃决临界条件与溃决风险评估程式;最后,以帕隆藏布流域川藏铁路交通廊道沿线34个小型冰碛堰塞湖为例说明评估程式的作业流程. 研究结果表明:地震触发小型水体共振时涌浪运动幅度远超同等条件下的非共振涌浪幅度,且地震作用停止后涌浪波幅缓慢衰减,在共振涌浪时程曲线中存在稳态幅值持续运动阶段;当考虑地震共振效应后,帕隆藏布流域危险冰碛湖数量由3增至11,并在地震动水平地震加速度(PGA)较小区域均有分布;研究可为川藏铁路等沿线堰塞湖地震溃坝风险评估提供科学依据.Abstract: Shaking table model experiments were designed to study the overtopping failure mechanism of moraine dams under action of earthquake-induced resonant water surges (ERWSs). Firstly, movements of earthquake-triggered surges under resonant and non-resonant conditions were compared to examine the main influencing factors of maximum height of ERWSs, and a prediction equation for the maximum height was proposed through dimensional analysis. Then, based on the critical water head condition for coarse particle initiation and the critical water volume condition for sediment transportation in dam break, critical conditions of overtopping failure for barrier dams under water surge actions were established and a risk assessment procedure was developed. Finally, taking the 34 small-scale moraine-dammed lakes located in the Parlung Zangbo River basin as examples, the operation of the proposed procedure was demonstrated. Results show that compared with non-resonant surges, ERWSs have greater amplitudes and a much slower process of attenuation with time, and a steady state with continuous large-amplitude wave motion exists in the time history of the resonant surge. When the seismic resonance effect is considered, the number of dangerous moraine-dammed lakes in the Parlung Zangbo River basin increases from 3 to 11, and the distribution extends to the areas with smaller peak ground acceleration (PGA). The results provide a scientific basis for seismic risk assessment of barrier lakes along the Sichuan-Tibet Railway.
-
Key words:
- earthquake /
- surges /
- resonance /
- moraine-dammed lake /
- overtopping failure
-

图 2 白噪声激励下涌浪波高时程傅立叶幅值谱
Figure 2. Fast Fourier transform (FFT) spectrum of wave height time history due to white noise excitation
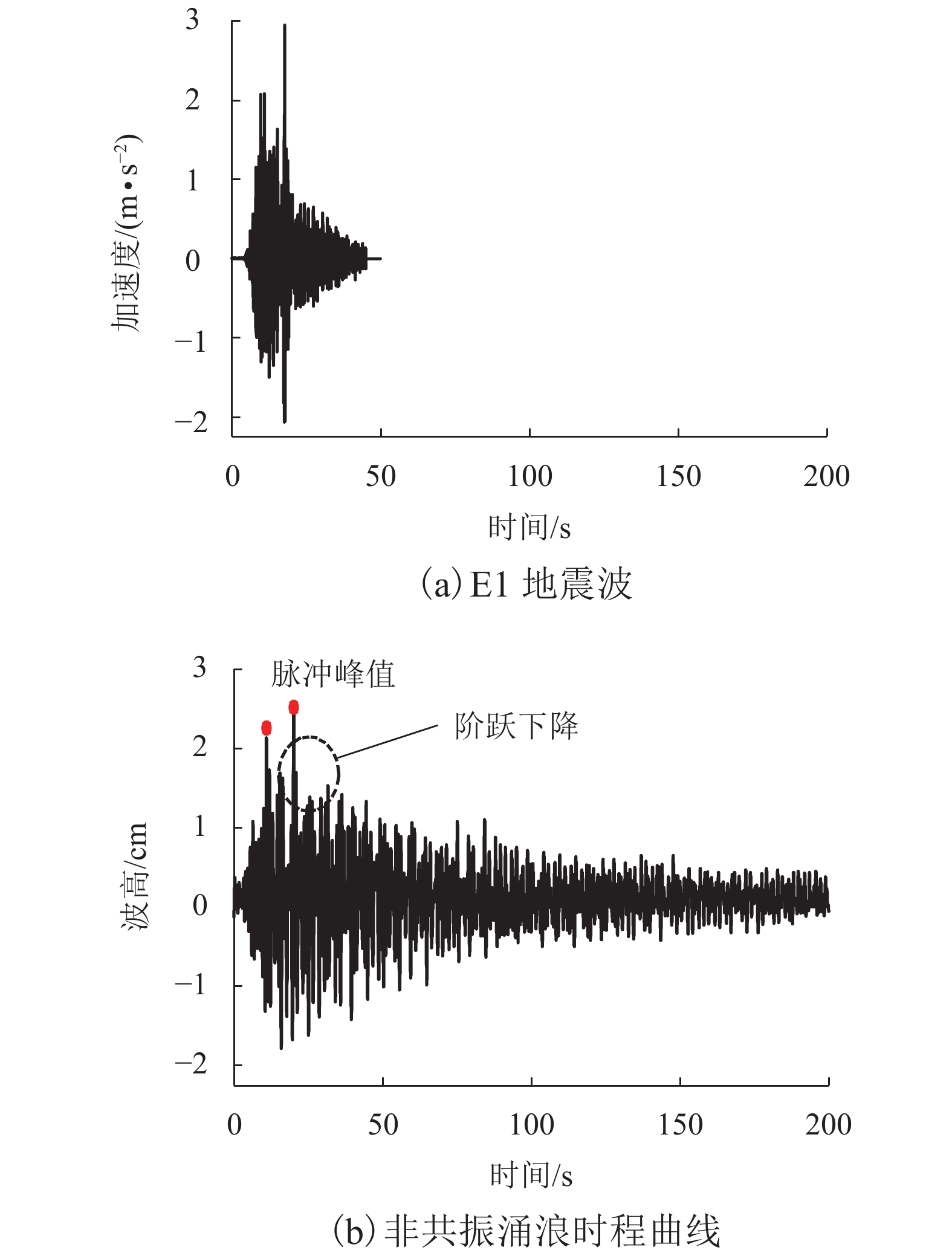
图 3 E1地震波及相应的非共振涌浪时程曲线(水深30.0 cm)
Figure 3. E1 earthquake wave and the induced non-resonant water wave (water depth = 30.0 cm)
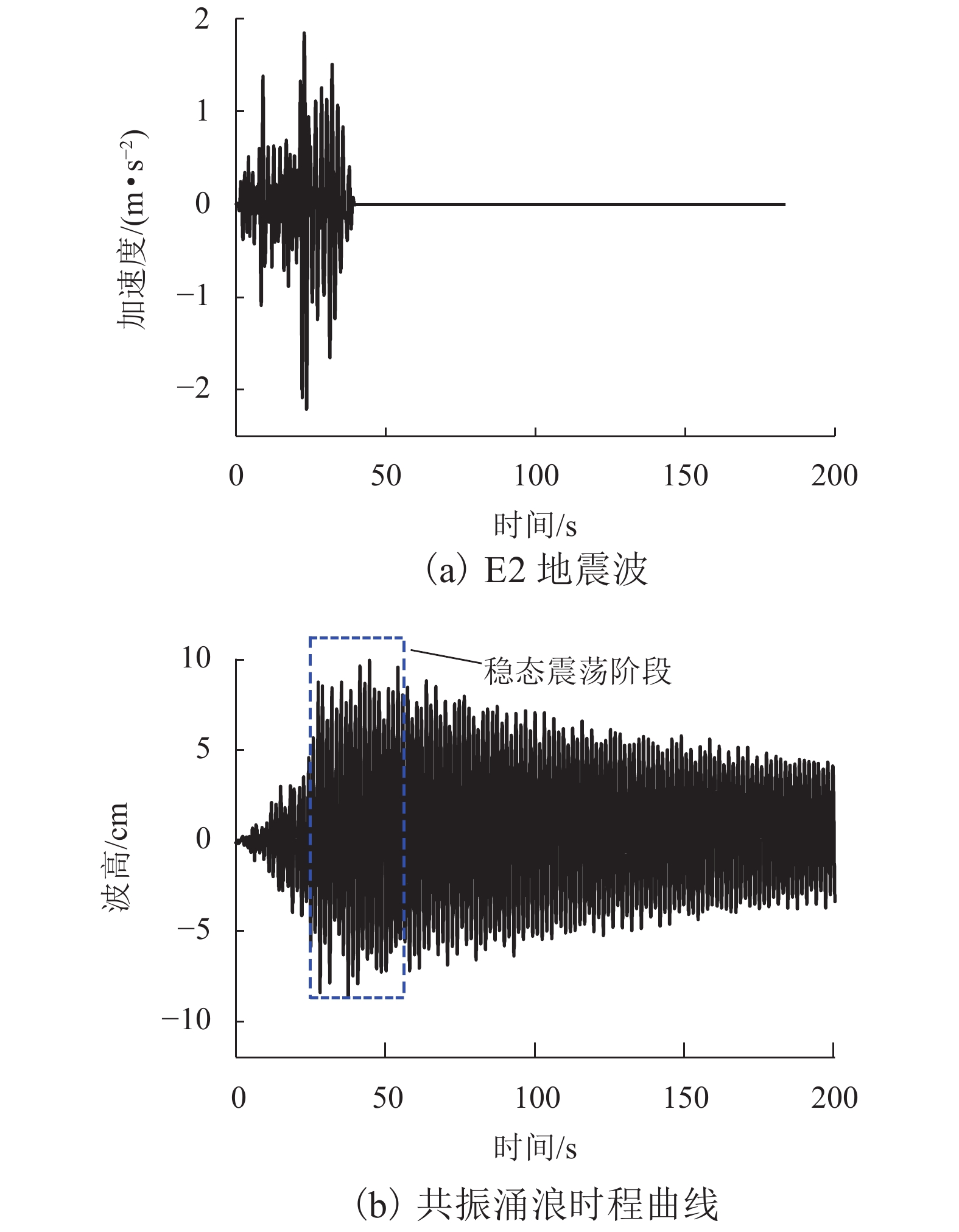
图 4 E2地震波及相应的共振涌浪时程曲线(水深30 cm)
Figure 4. E2 earthquake wave and the induced resonant water wave (water depth = 30 cm)
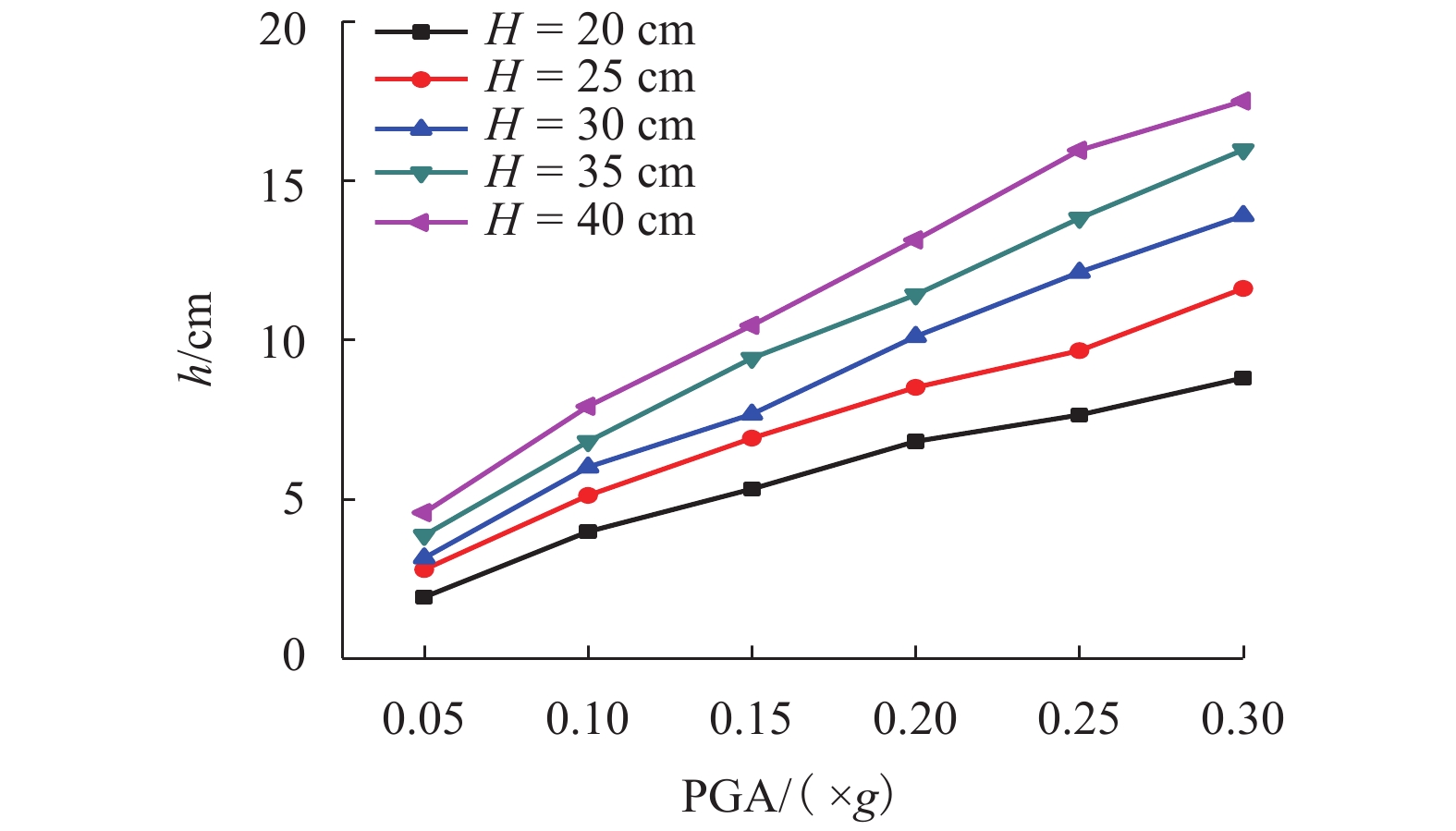
图 5 不同水深条件下地震共振涌浪最大波高随PGA变化
Figure 5. Variations of maximum wave elevation with increasing PGA at different water depths

图 7 涌浪作用下堰塞坝溃决风险评估程式
Figure 7. Risk assessment procedure for the overtopping failure of natural dams due to earthquake-induced water waves
-
刘宁, 程尊兰, 崔鹏, 等. 堰塞湖及其风险控制[M]. 北京: 科学出版社, 2013: 352-372. WILFRIED H. On the morphodynamics of iceldebris-transport systems in cold mountain areas[J]. Norsk Geografisk Tidsskrift, 1996, 50(1): 3-9. doi: 10.1080/00291959608552346 CLAUGE J J, EVANS S G. A review of catastrophic drainage of moraine-dammed lakes in British Columbia[J]. Quaternary Science Reviews, 2000, 19(17/18): 1763-1783. doi: 10.1016/S0277-3791(00)00090-1 AWAL R, BAYABIL H K, FARES A. Experimental study on glacial lake outburst floods due to waves overtopping and erosion of moraine dam[J]. Annuals of Disaster Prevention and Research Institute, 2010, 53: 583-594. 石振明,王友权,彭铭,等. 余震作用下堰塞坝体破坏及溃决过程大型振动台试验研究[J]. 工程地质学报,2014,22(1): 71-77. doi: 10.3969/j.issn.1004-9665.2014.01.010SHI Zhengming, WANG Youquan, PENG Ming, et al. Large scale shaking table tests on failure and breach process of landslide dams under aftershocks[J]. Journal of Engineering Geology, 2014, 22(1): 71-77. doi: 10.3969/j.issn.1004-9665.2014.01.010 WESTERGAARD H M. Water pressures on dams during earthquakes[J]. Transactions of the American Society of Civil Engineers, 1933, 98(3): 418-433. CHWANG A T, HOUSNER G W. Hydrodynamic pressures on sloping dams during earthquakes. part 1. momentum method[J]. Journal of Fluid Mechanics, 1978, 87(2): 335-341. doi: 10.1017/S0022112078001639 CHEN B F, YUAN Y S. Hydrodynamic pressures on arch dam during earthquakes[J]. Journal of Hydraulic Engineering, 2010, 137(1): 34-44. SATO Q. Seismic waves in reservoirs generated by earthquake[J]. Civil Engineering Materials, 1967, 9: 480-482. DEMIREL E, AYDIN I. Numerical simulation and formulation of wave run-up on dam face due to ground oscillations using major earthquake acceleration records[J]. Journal of Engineering Mechanics, 2016, 142(6): 06016001.1-06016001.10. DU C, YAO L, HUANG Y, et al. Effects of seismic surge waves and implications for moraine-dammed lake outburst[J]. Frontiers of Earth Science, 2016, 10(3): 570-577. doi: 10.1007/s11707-015-0533-4 周亦良. 地震动水压力及冰碛堰塞坝失稳机理研究[D]. 成都: 西南交通大学, 2017. 姚令侃,邱燕玲,魏永幸. 青藏高原东缘进藏高等级道路面临的挑战[J]. 西南交通大学学报,2012,47(5): 719-734. doi: 10.3969/j.issn.0258-2724.2012.05.001YAO Lingkan, QIU Yanling, WEI Yongxing. Challenges in construction of railway and highway from Sichuan to Tibet through eastern margin of Tibetan Plateau[J]. Journal of Southwest Jiaotong University, 2012, 47(5): 719-734. doi: 10.3969/j.issn.0258-2724.2012.05.001 CHEN X Q, CUI P, LI Y, et al. Changes in glacial lakes and glaciers of post-1986 in the Poiqu River basin,Nyalam,Xizang (Tibet)[J]. Geomorphology, 2007, 88(3/4): 298-311. doi: 10.1016/j.geomorph.2006.11.012 WU G X, MA Q W, TAYLOR R E. Numerical simulation of sloshing waves in a 3D tank based on a finite element method[J]. Applied Ocean Research, 1998, 20(6): 337-355. doi: 10.1016/S0141-1187(98)00030-3 BALMFORTH N J, VON H J, PROVENZALE A, et al. Dam breaking by wave-induced erosional incision[J]. Journal of Geophysical Research Atmospheres, 2008, 113: 341-356. 蒋忠信,崔鹏,蒋良潍. 冰碛湖漫顶型溃决临界水文条件[J]. 铁道工程学报,2004,84(4): 21-26. doi: 10.3969/j.issn.1006-2106.2004.04.006JIANG Zhongxin, CUI Peng, JIANG Liangwei. Critical hydrologic condition for overflow burst of moraine lake[J]. Journal of Railway Engineering Society, 2004, 84(4): 21-26. doi: 10.3969/j.issn.1006-2106.2004.04.006 崔鹏,马东涛,陈宁生,等. 冰湖溃决泥石流的形成、演化与减灾对策[J]. 第四纪研究,2003,23(6): 621-62. doi: 10.3321/j.issn:1001-7410.2003.06.005CUI Peng, MA Dongtao, CHEN Ningsheng, et al. The initiation,motion and mitigation of debris flow caused by glacial lake outburst[J]. Quaternary Sciences, 2003, 23(6): 621-62. doi: 10.3321/j.issn:1001-7410.2003.06.005 吴积善, 田连权, 康志成, 等. 泥石流及其综合治理[M]. 北京: 科学出版社, 1993: 129-130. 董华飞,李俊青. 洪水漫顶条件下涌浪越坝的试验研究[J]. 人民珠江,2015(4): 13-16. doi: 10.3969/j.issn.1001-9235.2015.04.005DONG Huafei, LI Junqing. Experimental study on over-dam surge under the condition of flood overtopping[J]. Pearl River, 2015(4): 13-16. doi: 10.3969/j.issn.1001-9235.2015.04.005 张金牛,吴卫,刘桦,等. 孤立波作用下斜坡堤越浪量的实验研究[J]. 水动力学研究与进展A辑,2014,29(6): 656-662.ZHANG Jinniu, WU Wei, LIU Hua, et al. An experimental study on overtopping of solitary wave against a slope dike[J]. Chinese Journal of Hydrodynamics, 2014, 29(6): 656-662. 王欣, 刘时银, 丁永建. 中国喜马拉雅山冰碛湖溃决灾害评价方法与应用研究[M]. 北京: 科学出版社, 2016: 56-61. 中国地震局. 中国地震动参数区划图: GB 18306—2015[S]. 北京: 中国标准出版社, 2016. -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 684
- HTML全文浏览量: 382
- PDF下载量: 23
- 被引次数: 0