

Shaking Table Test for Structural Model with Inclined Column Transfer System
-
摘要: 为了研究某超高层建筑的抗震表现,对其进行了比例为1:35的模型振动台试验研究,该建筑塔楼的部分框架结构由两根钢管混凝土越层巨型框支柱支承,在结构7~11层设有钢管混凝土斜柱转换结构. 通过试验研究了缩比模型的破坏模式、自振周期、层间位移、扭转响应等动力响应;采用PERFORM-3D软件进行原结构弹塑性地震响应数值分析. 研究结果表明:由于结构布置的不对称性,结构整体扭转效应明显,塔楼部分的结构抗扭刚度不足;在台面加速度峰值接近罕遇地震工况的设定值470 cm/s2时,塔楼部分发生扭转破坏,此时除个别楼层外,各楼层的层间位移角仍满足弹塑性层间位移角限值1/100的要求;在所有工况下,转换区域未见破坏,钢管混凝土框支柱、斜柱的应变均处于弹性工作状态;数值分析结果和试验结果吻合良好.Abstract: To study the seismic performance of a super high-rise building, a shaking table test with a geometrical scale of 1/35 was carried out. Part of frames in the tower structure of the building are supported by two concrete-filled steel tubular (CFST) mega frame columns with duplex-story height, which are not connected to the first 6 floors. The inclined CFST column transfer structure is arranged on the 7th to 11th floors. Through experiments, failure modes, natural vibration period, story drift, and torsional responses of the structural model were studied first. Then, a numerical analysis of the elastic-plastic seismic response of the original structure was carried out via PERFORM-3D software. Results show that torsion effects were significant because of the asymmetric plane arrangement and the inadequate torsional stiffness of the tower. When the actual peak acceleration on the shake table surface was close to the value of the rare earthquake condition (i.e., 470 cm/s2), the torsional failure occurred in the tower. In this condition, except for very few stories, the story-drift angle of each floor was still smaller the limit value 1/100 of the elastic-plastic story-drift angle. Under all load conditions, the strains of CFST frame columns and inclined ones of the transfer areas stayed elastic. The analysis results are in good agreement with those of experiments.
-

图 1 结构模型外观及斜柱转换结构示意
Figure 1. Diagram of the model and the inclined column transfer structure
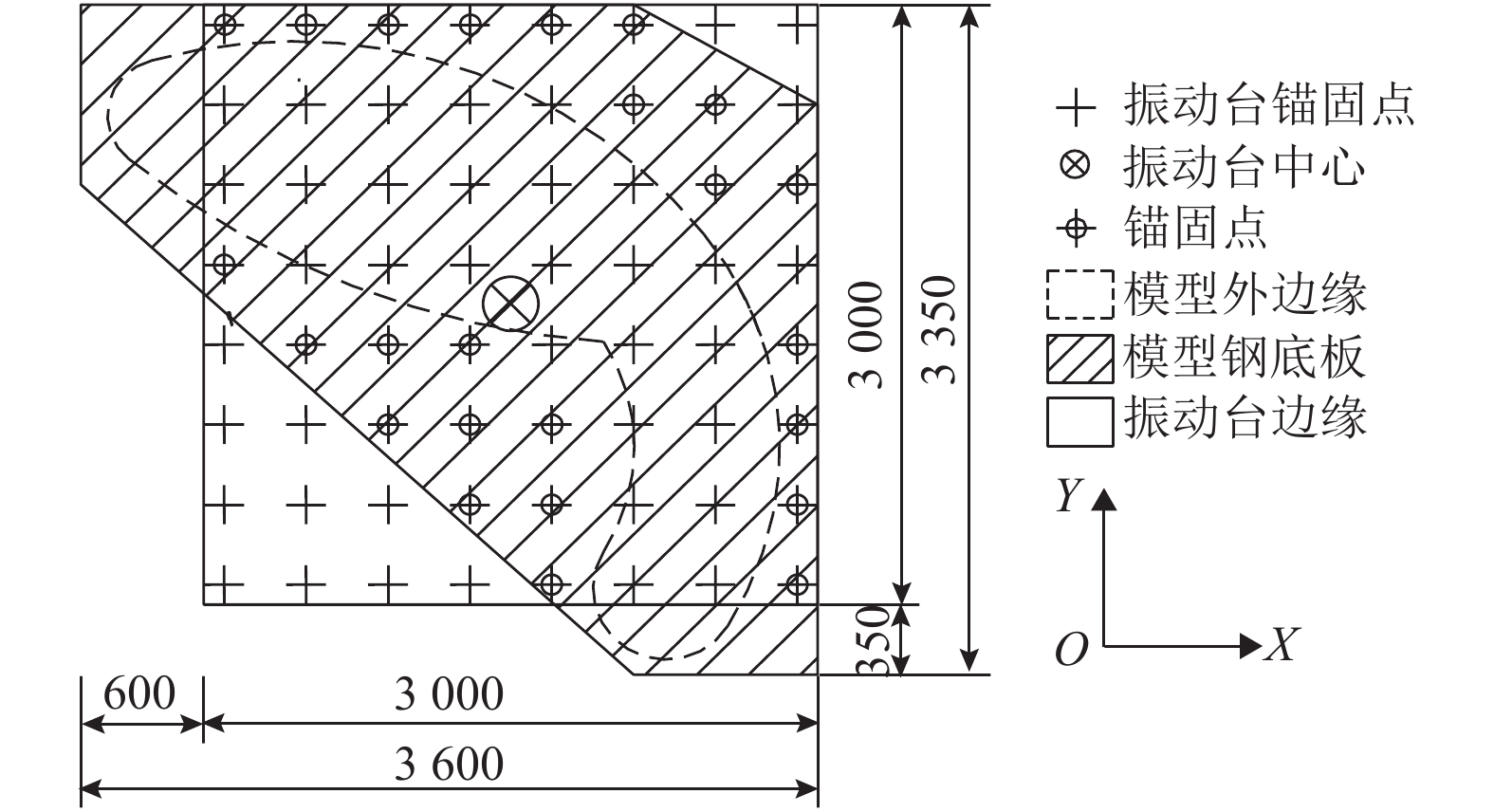
图 4 模型、底板和振动台面三者关系
Figure 4. Planar relationship among the model,base, and shake table
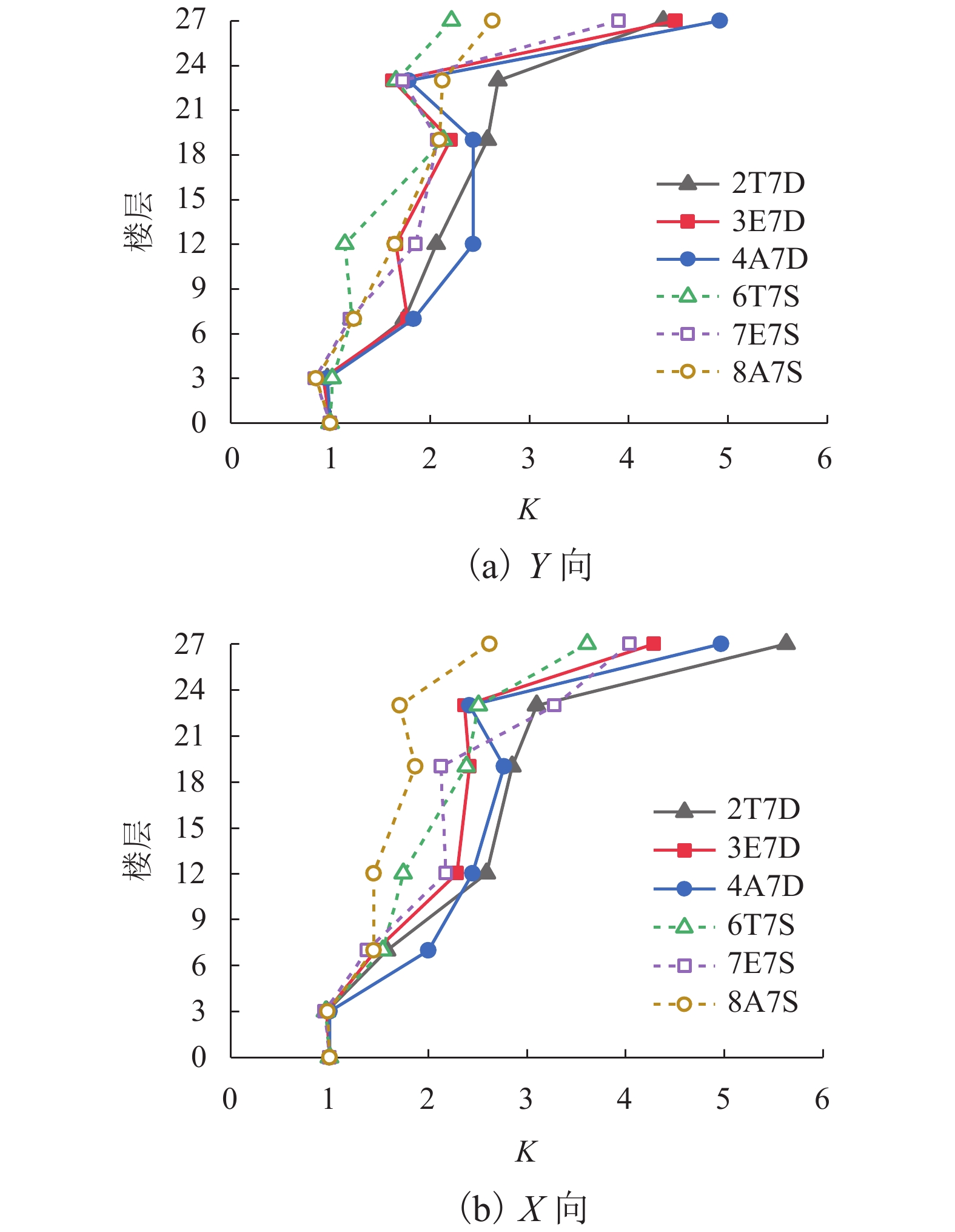
图 6 各工况下模型监测楼层加速度放大系数
Figure 6. Amplification factor of acceleration of the monitored stories of the model in various load cases
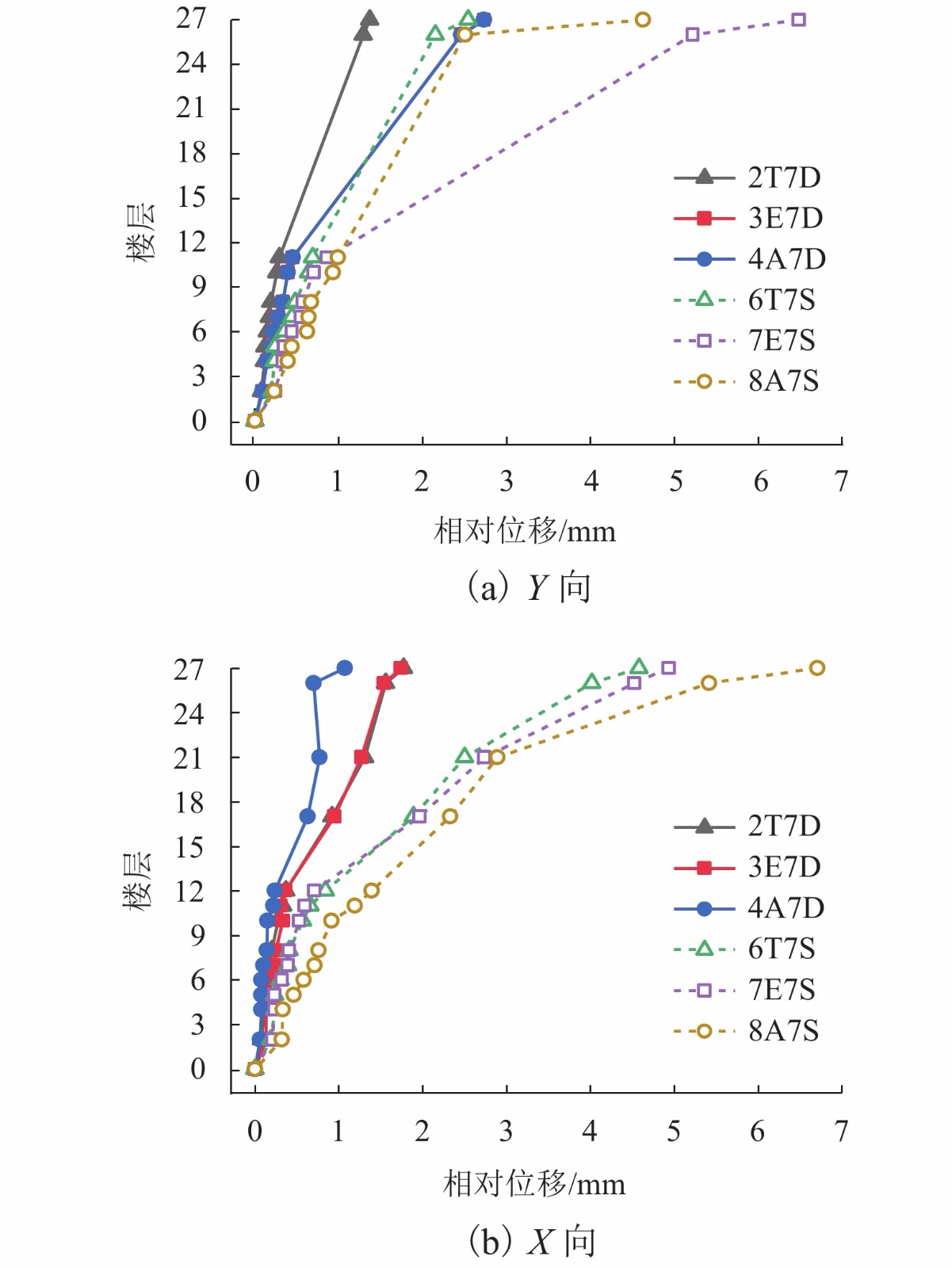
图 7 楼层质心相对底座位移变化曲线
Figure 7. Displacement at the mass center of floors relative to the base
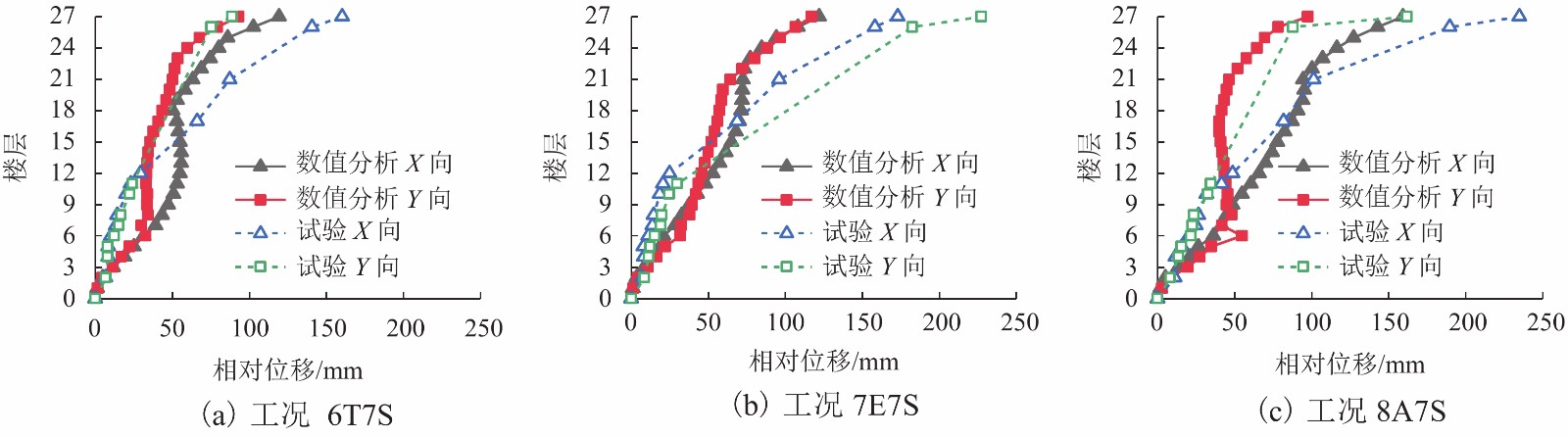
图 9 不同工况下楼层质心相对底座位移包络图
Figure 9. Relative displacement envelope of mass center to the base in various load cases
表 1 振动台试验的加载方案
Table 1. Loading scheme of shaking table test
工况 地震激励 加速度峰值/(× g) 持时/s X 向 Y 向 Z 向 1W 第 1 次白噪声 2T7D T 波 0.08 0.09 0.05 5.79 3E7D E 波 0.05 0.09 0.05 5.71 4A7D 安评波 0.08 0.09 0.06 4.38 5W 第 2 次白噪声 6T7S T 波 0.22 0.26 0.16 5.79 7E7S E 波 0.16 0.26 0.15 5.71 8A7S 安评波 0.22 0.26 0.17 4.38 9W 第 3 次白噪声  下载: 导出CSV
下载: 导出CSV
表 2 台面实测加速度峰值
Table 2. Acceleration measured on table surface
工况 Y 向/(cm•s−2) X 向/(cm•s−2) Z 向/(cm•s−2) X 向/Y 向 设定 实测 设定 实测 设定 实测 设定 实测 2T7D 87 84 77 70 21 2.0 0.88 0.83 3E7D 87 87 54 58 21 1.9 0.61 0.67 4A7D 88 88 74 55 25 1.9 0.85 0.63 6T7S 250 233 219 238 61 2.2 0.88 1.02 7E7S 250 239 153 152 60 1.8 0.61 0.64 8A7S 250 291 212 443 68 2.0 0.85 1.52
下载: 导出CSV
表 3 加速度计及位移计布置方法
Table 3. Layout of accelerometers and displacement meters
仪器类型 方向 测点位置 布置层数/层 加速度计 X、Y、Z 质心 底板、3、7、19、23 位移计 X、Y、Z 质心 底板、6、12、27 位移计 X、Y 质心 2、4、5、7、8、10、11、17、21、26 位移计 X、Y 远端 6、7、12、27
下载: 导出CSV
表 4 白噪声激励下自振频率测试结果
Table 4. Test results of natural frequency under white noise excitation
工况 频率/Hz 周期/s 第 1 次 第 2 次 第 3 次 第 1 次 第 2 次 第 3 次 1W 4.006 5.165 8.388 0.250 0.194 0.119 5W 3.944 5.102 8.075 0.254 0.196 0.124 9W 3.349 4.014 6.730 0.299 0.249 0.149
下载: 导出CSV
表 5 重点观测楼层远端和质心测点的位移比
Table 5. Inter-drift at the mass center and distal point of monitored floors
楼层 2T7D 3E7D 4A7D 6T7S 7E7S 8A7S 27 1.56 1.48 1.37 1.94 1.48 1.89 12 2.01 1.99 2.00 2.03 2.01 2.03 7 1.62 1.56 1.62 1.87 1.74 1.76 6 1.36 1.45 1.38 1.43 1.56 1.51
下载: 导出CSV
-
李豪邦. 高层建筑中结构转换层的新形式——斜柱转换[J]. 建筑结构学报,1997,18(2): 41-45. doi: 10.3321/j.issn:1000-6869.1997.02.006LI Haobang. A new form of structural transfer floors in highrise buildings—transfer by slanting columns[J]. Journal of Building Structures, 1997, 18(2): 41-45. doi: 10.3321/j.issn:1000-6869.1997.02.006 吕鹏,刘洪亮. 带斜柱转换的某高层建筑结构设计[J]. 广东土木与建筑,2013(4): 3-7.LÜ Peng, LIU Hongliang. Structural design of a high-rise building with inclining columns[J]. Guangdong Architecture Civil Engineering, 2013(4): 3-7. 王震,杨学林,冯永伟,等. 超高层钢结构中斜交网格节点有限元分析及应用[J]. 建筑结构,2019,49(10): 46-50,36.WANG Zhen, YANG Xuelin, FENG Yongwei, et al. Finite element analysis and application of diagonal frame joint in super high-rise steel structure[J]. Building Structure, 2019, 49(10): 46-50,36. 史庆轩,王峰,桑丹,等. 钢管混凝土斜交网格筒结构抗震性能研究[J]. 振动与冲击,2018,37(7): 77-84.SHI Qingxuan, Wang Feng, SANG Dan, et al. Aseismic behavior of CFST diagrid tube structures[J]. Journal of Vibration and Shock, 2018, 37(7): 77-84. 孙飞飞,冉明明,周健,等. 钢管混凝土柱巨型交叉节点受力性能研究[J]. 建筑结构学报,2017,38(5): 69-76.SUN Feifei, RAN Mingming, ZHOU Jian, et al. Mechanical behavior of huge crossover joint between two concrete-filled steel tubular columns[J]. Journal of Building Structures, 2017, 38(5): 69-76. 史杰,施泓,尹海鹏. 招商银行深圳分行大厦主塔楼结构抗震性能化设计[J]. 建筑结构,2016(9): 19-24.SHI Jie, SHI Hong, YIN Haipeng. Performance-based seismic design for the main tower of China Merchants Bank (Shenzhen Branch) mansion[J]. Building Structure, 2016(9): 19-24. 刘巍,张恺,牛奔,等. 深圳某斜柱转换超限工程结构设计与分析[J]. 建筑结构,2019(增刊1): 74-78.LIU Wei, ZHANG Kai, NIU Ben, et al. Structural design and analysis of an inclined column transfer overrun project in Shenzhen[J]. Building Structure, 2019(S1): 74-78. 何智,杨磊,申波,等. 斜柱角度对新型斜柱转换结构抗震性能的影响[J]. 广西大学学报(自然科学版),2018,43(1): 77-85.HE Zhi, YANG Lei, SHEN Bo, et al. Effect of angle of inclined column on seismic behavior of new inclined column transfer structure[J]. Journal of Guangxi University (Natural Science Edition), 2018, 43(1): 77-85. 朱颖杰,聂建国,樊健生. 交叉斜柱转换节点受力性能试验研究[J]. 建筑结构学报,2016,37(6): 115-122.ZHU Yingjie, NIE Jianguo, FAN Jiansheng. Experimental research on mechanical behavior of transfer nodes for oblique-cross columns[J]. Journal of Building Structures, 2016, 37(6): 115-122. 金振奋,沈金,干钢,等. 高烈度区型钢混凝土超高层建筑结构设计研究[J]. 建筑结构,2013,43(15): 1-8.JIN Zhenfen, SHEN Jin, GAN Gang, et al. Seismic analysis and design for a SRC tube-in-tube structure in Lanzhou[J]. Building Structure, 2013, 43(15): 1-8. 周颖, 吕西林. 建筑结构振动台模型试验方法与技术[M]. 北京: 科学出版社, 2016: 3-15. 中华人民共和国住房和城乡建设部组织. 建筑抗震设计规范: GB 50011—2010[S]. 北京: 中国建筑工业出版社, 2016. 谢礼立,翟长海. 最不利设计地震动研究[J]. 地震学报,2003,25(6): 250-261.XIE Lili, ZHAI Changhai. Study on the severest real ground motion for seismic design and analysis[J]. Acta Seismologica Sinica, 2003, 25(6): 250-261. 中华人民共和国住房和城乡建设部. 高层建筑混凝土结构技术规程: JGJ 3—2010[S]. 北京: 中国建筑工业出版社, 2010. 中国建筑科学研究院. 混凝土结构设计规范: GB 50010—2010[S]. 北京: 中国建筑工业出版社, 2015. 崔济东, 沈雪龙. PERFORM-3D原理与实例[M]. 北京: 中国建筑工业出版社, 2017: 65-66. MANDER J A B, PRIESTLEY M J N. Theoretical stress-strain model for confined concrete[J]. Journal of Structural Engineering, 1988, 114(8): 1804-1826. doi: 10.1061/(ASCE)0733-9445(1988)114:8(1804) -

 下载:
下载:





 点击查看大图
点击查看大图
计量
- 文章访问数: 693
- HTML全文浏览量: 441
- PDF下载量: 23
- 被引次数: 0