

BeiDou Navigation Satellite System/Inertial Measurement Unit Integrated Train Positioning Method Based on Improved Unscented Kalman Filter Algorithm
-
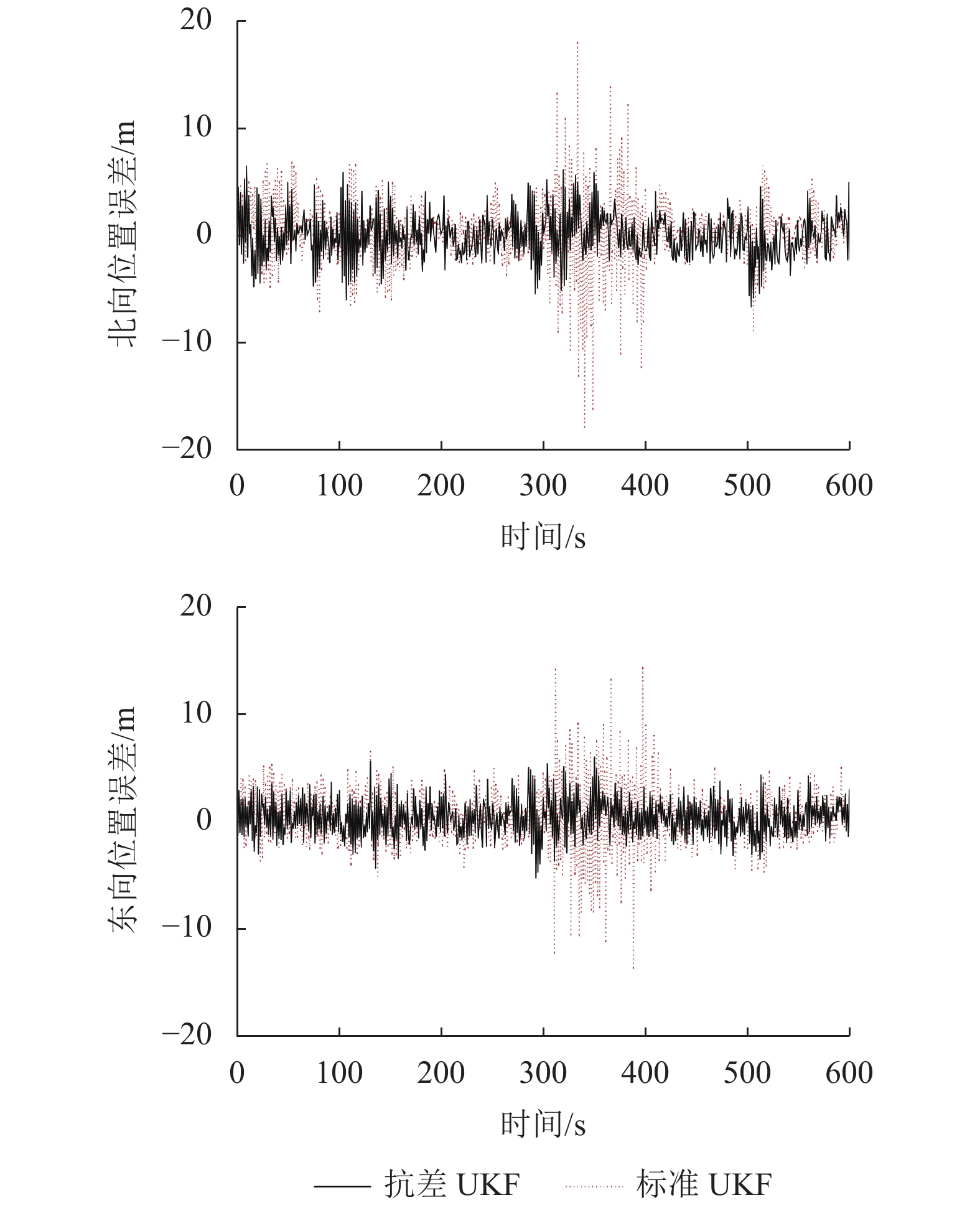
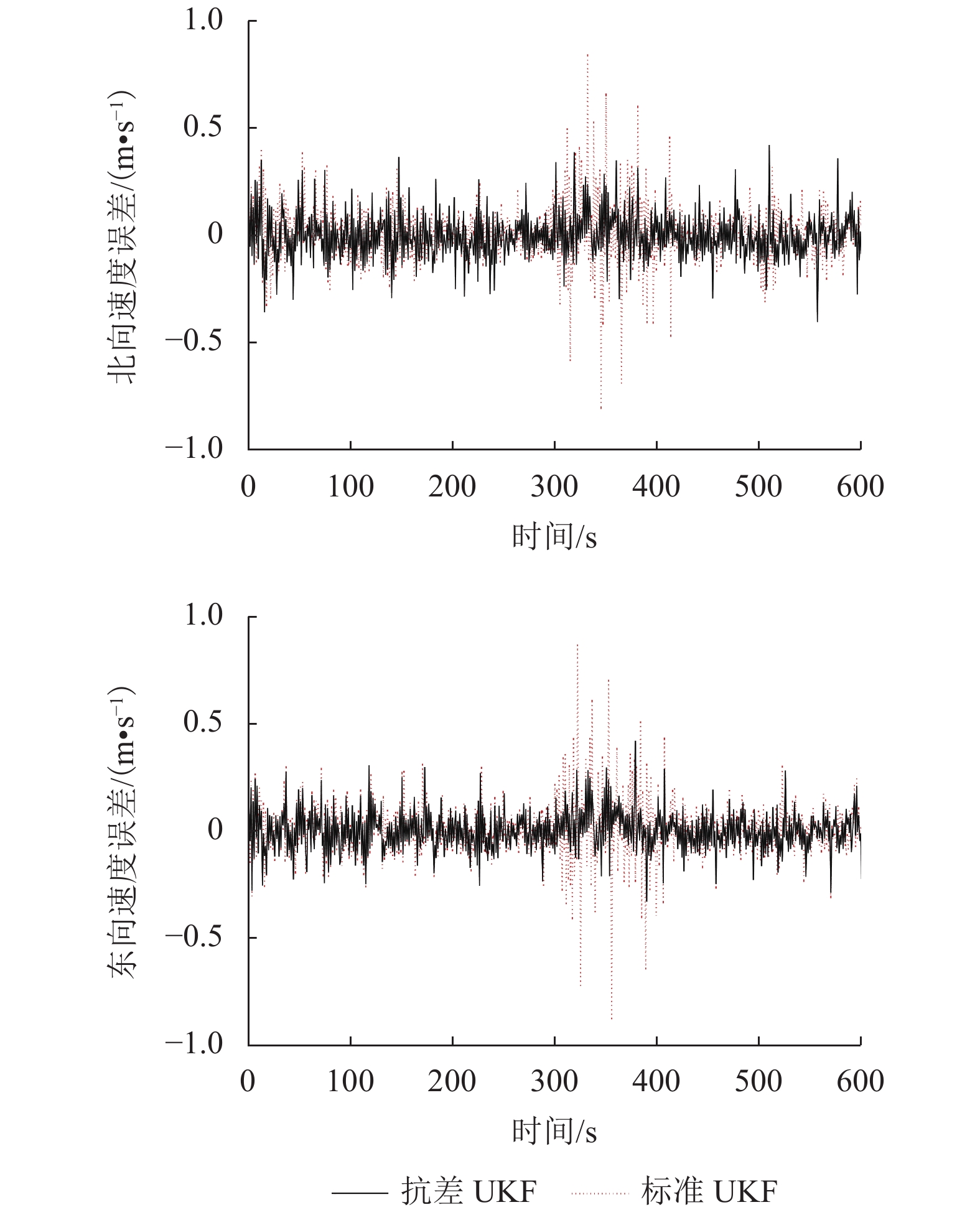
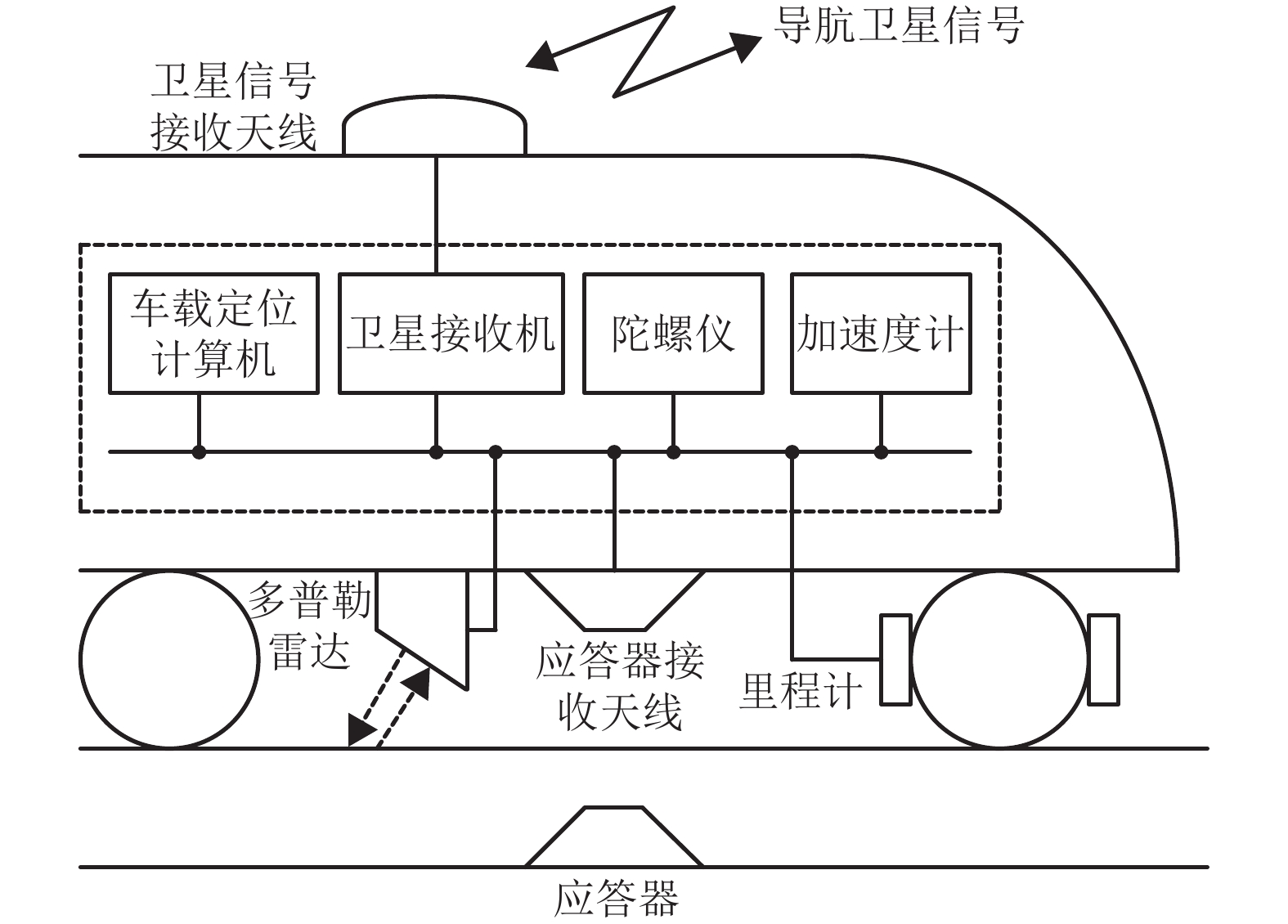
摘要: 为提高列车定位的精确性和连续性,采用北斗卫星接收机和惯性测量单元构建车载组合定位系统. 针对多传感器组合定位信息融合估计的非线性和鲁棒性需求,将抗差估计理论的等价权原理应用于标准无迹卡尔曼滤波(unscented Kalman filter,UKF)算法,构造了一种改进的UKF算法,通过对标准UKF算法的噪声协方差进行等价替换,从而起到调节滤波增益的作用,使得滤波算法对传感器观测粗差具有较强的抑制能力. 将改进的UKF算法与标准UKF算法应用于列车组合定位进行仿真比较,结果表明:传感器无观测异常时,改进UKF算法的滤波精度总体上略优于标准UKF算法;当传感器观测值含有随机粗差时,改进UKF算法的滤波精度及稳定性明显优于标准UKF算法,北向、东向位置平均估计误差分别降低了48.5%、48.8%,北向、东向速度平均估计误差分别降低了43.7%、48.9%.Abstract: In order to improve the accuracy and continuity of train positioning, BeiDou satellite receiver and inertial measurement unit were employed to construct an on-board integrated positioning system. Given the nonlinearity and robustness in the information fusion estimation of mulit-sensor positioning, an improved unscented Kalman filter (UKF) algorithm was proposed by applying the equivalence of robustness to the standard UKF. With the equivalent transformation of noise covariance in the standard UKF algorithm, the filter gain was adjusted, such that the filtering algorithm has a strong ability to suppress gross errors in sensor observation. The improved UKF algorithm and the standard UKF algorithm were applied to the integrated positioning for simulation comparison. The results show that, the filtering accuracy of the improved UKF is slightly higher than that of the standard UKF under normal conditions; the filtering accuracy and stability of the improved UKF is significantly better than the standard UKF when sensor observations contain gross errors. The average estimation errors of north and east positioning are respectively decreased by 48.5% and 48.8%. The average estimation errors of north and east speed are respectively declined by 43.7% and 48.9%.
-
表 1 误差统计结果(0~300 s)
Table 1. Error statistics(0−300 s)
参数 标准UKF 改进UKF 北向
位置/m东向
位置/m北向速度
/(m•s−1)东向速度
/(m•s−1)北向
位置/m东向
位置/m北向速度
/(m•s−1)东向速度
/(m•s−1)AVE 4.32 3.27 0.28 0.21 4.26 3.14 0.25 0.20 RMSE 3.34 2.51 0.22 0.16 3.18 2.45 0.19 0.15  下载: 导出CSV
下载: 导出CSV
表 2 误差统计结果(300~400 s)
Table 2. Error statistics(300−400 s)
参数 标准UKF 改进UKF 北向
位置/m东向
位置/m北向速度
/(m•s−1)东向速度
/(m•s−1)北向
位置/m东向
位置/m北向速度
/(m•s−1)东向速度
/(m•s−1)AVE 8.73 6.87 0.48 0.45 4.49 3.52 0.27 0.23 RMSE 6.49 5.11 0.35 0.33 3.23 2.74 0.21 0.17
下载: 导出CSV
-
SAAB S. A map matching approach for train positioning, part Ⅱ:application and experimentation[J]. IEEE Transactions on Vehicular Technology, 2000, 49(2): 476-484. doi: 10.1109/25.832979 蔡伯根. 低成本列控系统的列车组合定位理论与方法[D]. 北京: 北京交通大学, 2010. 马永强,郭进. 接触网定位器辅助列车定位技术[J]. 西南交通大学学报,2005,40(1): 1-4. doi: 10.3969/j.issn.0258-2724.2005.01.001MA Yongqiang, GUO Jin. Auxiliary train location technique with registration arms of electrified railways[J]. Journal of Southwest Jiaotong University, 2005, 40(1): 1-4. doi: 10.3969/j.issn.0258-2724.2005.01.001 JULIE B, FILIP A, JULIETTE M, et al. Galileo for improving railway operations:question about the positioning performances analogy with the RAMS requirements allocated to safety applications[J]. European Transport Research Review, 2010, 2(2): 93-102. doi: 10.1007/s12544-010-0032-3 刘江,蔡伯根,王剑. 基于卫星导航系统的列车定位技术现状与发展[J]. 中南大学学报(自然科学版),2014,45(11): 4033-4042.LIU Jiang, CAI Baigen, WANG Jian. Status and development of satellite navigation system based train positioning technology[J]. Journal of Central South University (Science and Technology), 2014, 45(11): 4033-4042. JWO D J, WENG T P. An adaptive sensor fusion method with applications in integrated navigation[J]. Journal of Navigation, 2008, 61(4): 705-721. doi: 10.1017/S0373463308004827 张亮. 基于EKF的GPS/ODO列车定位方法研究[D]. 北京: 北京交通大学, 2016. JIANG Zhuqing, LIU Chonghua, ZHANG Gong, et al. GPS/INS integrated navigation based on UKF and simulated annealing optimized SVM[C]//2013 IEEE 78th Vehicular Technology Conference (VTC Fall). Las Vegas: IEEE, 2013: 30-38. JULIER S J, UHLMANN J K. Unscented filtering and nonlinear estimation[J]. Proceedings of the IEEE, 2004, 92(3): 401-422. doi: 10.1109/JPROC.2003.823141 YU Z J, WEI J M, LIU H T. A new adaptive maneuvering target tracking algorithm using artificial neural networks[C]//Proceedings of the International Joint Conference on Neural Networks. Hong Kong: IEEE, 2008: 901-905. CHO S Y, CHOI W S. Robust positioning technique in low-cost DR/GPS for land navigation[J]. IEEE Transactions on Instrumentation and Measurement, 2006, 55(4): 1132-1142. doi: 10.1109/TIM.2006.877718 戴连君. 基于北斗卫星系统的列车定位方法研究[D]. 北京: 北京交通大学, 2013. 杨波,秦永元,严恭敏. 列车组合导航系统研究与仿真[J]. 传感技术学报,2007,20(1): 242-246. doi: 10.3969/j.issn.1004-1699.2007.01.054YANG Bo, QIN Yongyuan, YAN Gongmin. Research and simulation on the integrated navigation system for train[J]. Chinese Journal of Sensors and Actuators, 2007, 20(1): 242-246. doi: 10.3969/j.issn.1004-1699.2007.01.054 刘江,蔡伯根,唐涛,等. 低成本列车组合定位系统容错算法设计[J]. 铁道学报,2011,33(1): 39-46. doi: 10.3969/j.issn.1001-8360.2011.01.007LIU Jiang, CAI Baigen, TANG Tao, et al. Fault-tolerant algorithm design of low-cost integrated train positioning system[J]. Journal of the China Railway Society, 2011, 33(1): 39-46. doi: 10.3969/j.issn.1001-8360.2011.01.007 易大江. 组合导航中的鲁棒滤波研究[D]. 长沙: 国防科学技术大学, 2008. 杨元喜. 抗差估计理论及其应用[M]. 北京: 八一出版社, 1993: 1-10. YANG Y, XU T. An adaptive Kalman filter based on sage windowing weights and variance components[J]. Journal of Navigation, 2003, 56(2): 231-240. doi: 10.1017/S0373463303002248 李雪鹏,张幼群,包括. UKF的改进算法及其在伪卫星定位中的应用[J]. 测绘科学技术学报,2008,25(2): 108-111.LI Xuepeng, ZHANG Youqun, BAO Kuo. Improved UKF algorithm for pseudolite positioning system[J]. Journal of Geomatics Science and Technology, 2008, 25(2): 108-111. 杨元喜. 自适应动态导航定位[M]. 北京: 测绘出版社, 2006: 68-76. -

 下载:
下载:


 点击查看大图
点击查看大图
图(7) / 表(2)
计量
- 文章访问数: 1003
- HTML全文浏览量: 460
- PDF下载量: 43
- 被引次数: 0