

Weighted Fusion-Based Unscented Kalman Filter Positioning Algorithm for Normal-Conducting High-Speed Maglev Trains
-
摘要:
为提高高速磁浮列车测速定位的精确性,本文针对基于长定子齿槽检测的常导高速磁浮列车测速定位方法在列车运行过程中可能因测速定位信号缺失、干扰、测速定位安装误差等原因引起的定位不准问题,提出一种基于加权融合无迹卡尔曼滤波(UKF)的常导高速磁浮列车测速定位算法. 介绍了高速磁浮列车基于长定子齿槽的测速定位方法,并对多路冗余速度位置信息进行预处理和自适应加权融合处理;给出基于加权融合UKF的常导高速磁浮列车测速定位算法模型;基于磁浮列车测速定位在环测试试验台试验,对改进后的无迹卡尔曼滤波磁浮定位算法与原定位算法进行了对比分析. 分析结果表明:磁浮列车平均速度误差减小了32.6%,速度极差降低了49.3%,有效消除了信号采集噪声,提高了磁浮列车测速定位精度.
Abstract:The positioning and speed measurement method for normal-conducting high-speed maglev trains based on tooth slot detection of long stator may have inaccurate positioning caused by the lack of speed measurement and positioning signal, interference, and installation error of speed measurement and positioning during maglev train operation. Therefore, in order to improve the accuracy of positioning and speed measurement of high-speed maglev trains, an unscented Kalman filter (UKF) speed measurement and positioning algorithm for normal-conducting high-speed maglev trains based weighted fusion was proposed. The speed measurement and positioning method for high-speed maglev trains based on the tooth slot of a long stator was introduced, and the multi-channel redundant speed and position information was pre-treated, adaptively weighted, and fused. The UKF speed measurement and positioning algorithm for normal-conducting high-speed maglev trains based on weighted fusion was given. Based on the speed measurement and positioning in-loop test of the maglev train on a testbed, the improved UKF maglev position algorithm was compared with the original positioning algorithm. The analysis shows that the average speed error of the maglev train is reduced by 32.6%, and the speed range is reduced by 49.3%, which effectively eliminates the signal acquisition noise and improves the accuracy of speed measurement and positioning of maglev trains.
-
为建成交通强国,我国将推动高速磁浮列车技术研究列为交通强国战略的重要组成部分[1]. 测速定位技术是磁浮列车高效安全运行的基础[2-3],精确无延时地检测出列车在每个时刻的速度和位置是确保整个列车系统安全运行的首要条件. 在运行过程中,列车通过测速定位系统获得列车的位置信息,从而实现高效牵引[4]. 高速磁浮列车测速定位与运行控制、牵引控制、车地通信、悬浮控制等多个方面紧密相关,对精度、响应时间等指标要求较高[5].
基于常导制式高速磁浮特有的长定子齿槽结构,齿槽检测定位技术具有精度高、可靠性高、维护相对简单、造价相对较低的特点[6],已应用于上海磁浮线及四方磁浮试验线. 目前,此类方法的研究主要集中在轨道接缝和磁浮间隙对定位的影响. 罗桂斌[7]提出一种多传感器自适应加权融合算法,对传感器实际数据与随机抽样一致算法(RANSAC)预测模型的数据进行融合,解决了磁极相角信号过接缝时的畸变问题. 窦峰山等[8]采用一种新型跟踪微分器(TD),用于解决轨道接缝导致的信号畸变问题. 吴峻等[9]为了降低悬浮波动对相对位置检测的影响,利用悬浮间隙归一化处理相对位置检测信号的方法,使输出统一变换为8 mm悬浮间隙下的信号,达到了磁极相角精度2.8° 的检测要求.
针对多影响因素下的高速磁浮定位问题,本文提出一种基于加权融合无迹卡尔曼滤波(UKF)的常导高速磁浮列车测速定位算法,该算法以四路磁极相角信息(PRW)定位信号为输入信息,先局部处理,再全局加权融合后经无迹卡尔曼滤波算法进行隐藏状态预测,减小不确定性因素影响,获得更加准确可靠的速度位置信息.
1. 高速磁浮列车测速定位系统
1.1 基于长定子齿槽检测的测速定位方法
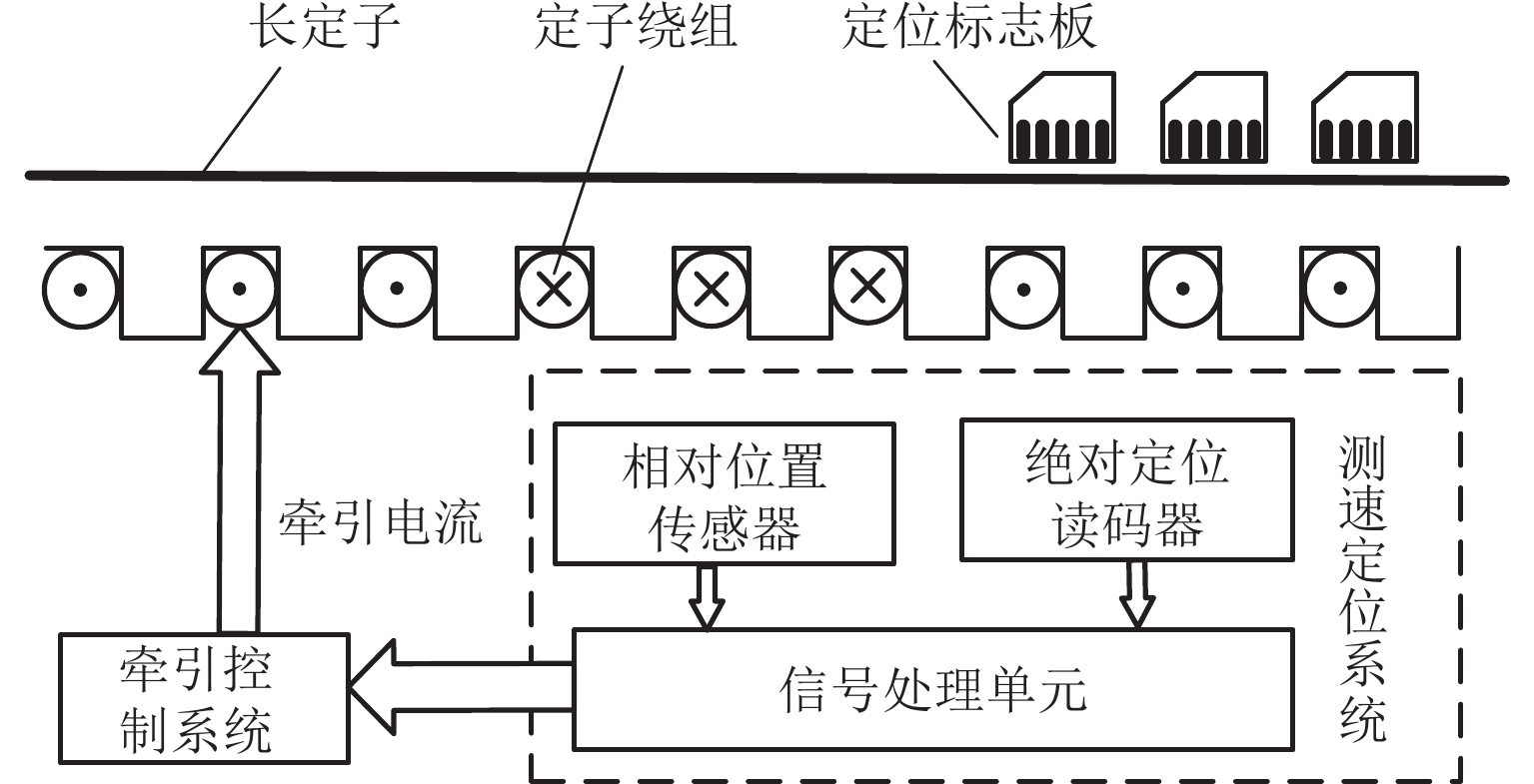
在常导制式高速磁浮列车中,采用基于长定子齿槽检测的测速定位方法,该测速定位系统包括相对位置传感器、绝对位置传感器、绝对定位标志板、长定子齿槽和信号处理单元. 长定子直线同步电机作为牵引电机置于轨道上,长定子具有齿槽结构[5]. 当列车沿轨道运行时,位于列车转子侧的相对位置传感器感应线圈由固定频率的激励信号源和谐振电路驱动组成,检测到感应线圈自身等效电感的周期性变化,经信号处理,可以得到单位时间内线圈通过的齿槽数,经过系列处理后得到列车速度. 在列车运行过程中由于各种不定因素的影响,比如测速定位系统(ORT)工作故障、误码等现象的存在,需要每隔一段里程通过绝对位置传感器检测轨道两侧的绝对位置标志板的位置信息,对列车运行的里程位置进行校正,依此来消除运行过程中累计的误差. 综合计算得出位置速度值输出至运控牵引控制系统,系统根据目标速度控制列车牵引电流,从而控制磁浮列车运行. 此种测速定位方法具有分辨力高、可靠性好、造价低的优点. 基于长定子齿槽检测的测速定位方法示意如图1.
 图 1 基于长定子齿槽检测的测速定位示意Figure 1. Speed measurement and positioning based on tooth slot detection of long stator
图 1 基于长定子齿槽检测的测速定位示意Figure 1. Speed measurement and positioning based on tooth slot detection of long stator1.2 高速磁浮列车测速定位数据预处理
磁浮列车通过整合处理相对位置传感器和绝对位置传感器收集的位置信息,生成PRW报文,经解析后,得到列车速度信息.
P=PPPA+PLRF+PASI, (1) v(a)=P(a+1)−P(a)Δt=ΔPΔt, (2) 式中:P为列车位置信息,m;PPPA为磁极相角度数PPA对应的里程信息,m;PLRF为储存的绝对定位标志板的里程信息,m;PASI为列车的相对位置信息,m;v(a)为第a次通信时刻列车的速度,m/s;P(a)为第a次通信时刻列车的位置,m;Δt为取样时间,Δt=0.02 s.
2. 高速磁浮列车定位测速算法研究
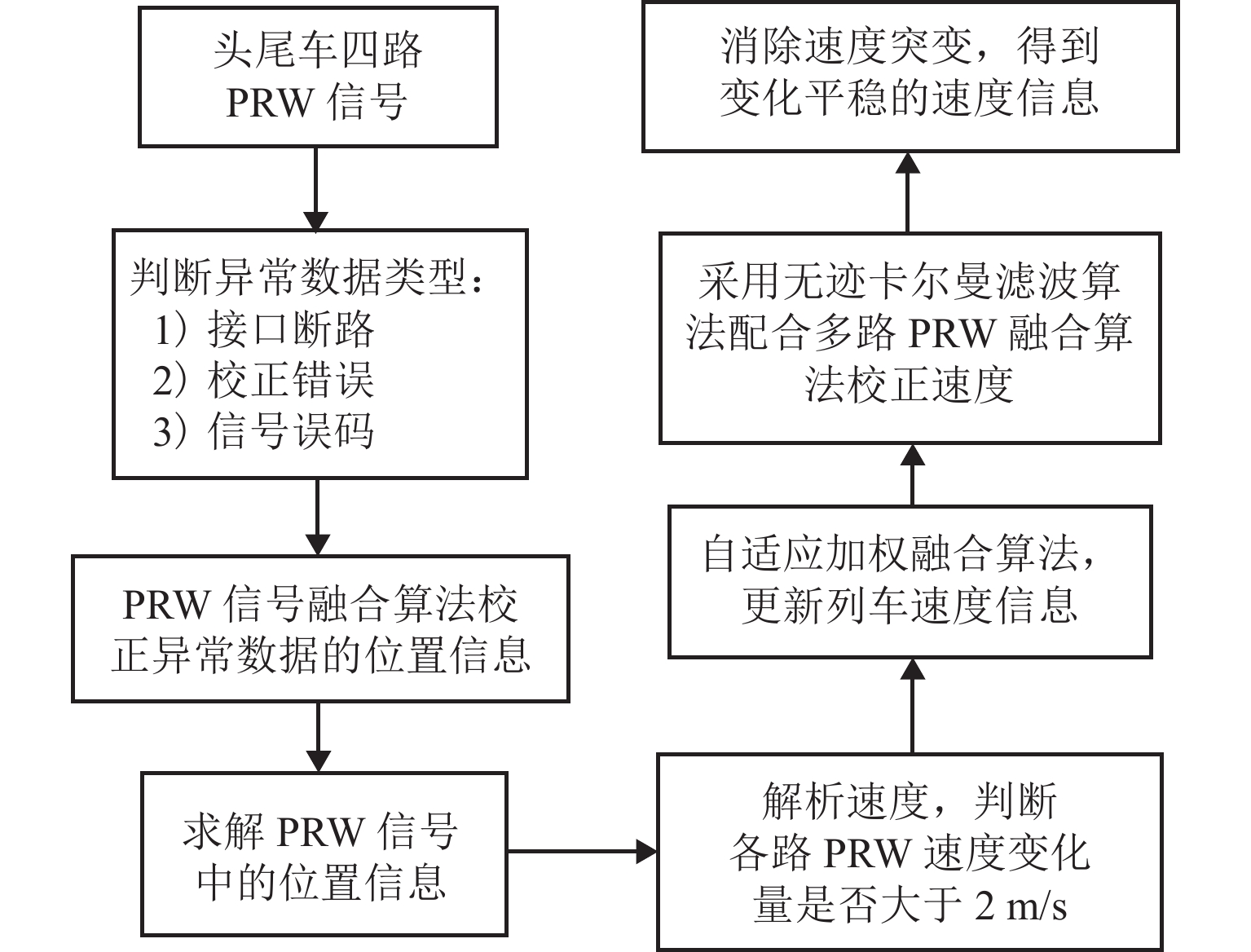
本文从自适应调整多路冗余定位信息角度出发,进行多路定位传感器信号融合,并基于无迹卡尔曼算法进行自适应滤波,以提高整个测速定位系统的滤波精度、容错性和可靠性,满足列车控制系统要求. 整个测速定位算法流程如图2所示.
 图 2 多路定位信号融合算法流程Figure 2. Flowchart of multi-channel positioning signal fusion algorithm
图 2 多路定位信号融合算法流程Figure 2. Flowchart of multi-channel positioning signal fusion algorithm2.1 高速磁浮定位信号自适应加权融合
磁悬浮列车传感器将PRW定位信号传输到车载计算机用于电机控制,车载计算机需要解析PRW信号中位置、速度信息,根据目标速度控制列车牵引力大小和列车运行速度. 列车运行过程中,牵引电机控制单元(MCU)会收到来自车头车尾共4路PRW定位信号. PRW定位信号可能会出现重发、丢包等现象,导致解析位置信息时出现误差. 因此,本文对列车运行过程中采集到的4路PRW定位信号进行研究,建立多路定位信号融合算法,采用自适应加权融合算法可得到均方误差最小的结果,以下为自适应加权融合过程.
1) 通过格拉布斯准则将4路PRW定位信号中同一时刻的异常速度信息剔除,根据支持度进行速度异常值替换,如式(3).
Lij=√xi2−2xixj+xj22=|xi−xj|√2, (3) 式中:Lij为某通信时刻第i路PRW定位单元和第j路定位单元之间的测量相关性,i,j=1,2,3,4,且i≠j;xi为第i路PRW定位单元的速度测量值.
归一化处理不同定位单元之间的测量相关性,如式(4).
lij=Lijmaxi,jLij=|xi−xj|maxi,j|xi−xj|. (4) 由(4)式可知,0≤lij≤1,且lij越接近于1,PRW定位单元之间的相关性越低,即PRW定位单元之间的支持度越小.
若同一时刻4路PRW定位信号相同,即max|xi−xj|√2=0,则lij=0. 得到支持度函数,如式(5),其中,Sij=Sji.
Sij=1−lij. (5) 构造出支持度矩阵S为
{\boldsymbol{S}} = \left[ {\begin{array}{*{20}{c}} 1&{{S _{12}}}&{{S _{13}}}&{{S _{14}}} \\ {{S _{21}}}&1&{{S _{23}}}&{{S _{24}}} \\ {{S _{31}}}&{{S _{32}}}&1&{{S _{34}}} \\ {{S _{41}}}&{{S _{42}}}&{{S _{43}}}&1 \end{array}} \right] . (6) 第i路PRW定位单元与其他PRW定位单元之间的支持度为
{S _i} = \frac{1}{4}\sum\limits_{j = 1}^4 {{S _{ji}}} . (7) 通过支持度计算公式,将支持度最高的数据代替异常数据.
2) 在整体融合方差最小的条件下,对每个测量值进行权重分配. 四路PRW定位信息相互独立,设x为待测的速度真值,某时刻第i路PRW定位单元的速度测量方差为
\sigma _i^2 = {{E}}{(x_i^{} - x)^2}. (8) 通信时刻t第i路PRW定位单元的方差估计值计算过程如式(9).
{\sigma _i^2}{(t)} = \frac{{t - 1}}{t}{R_{xii}}(t - 1) + \frac{1}{t}{x_i^2}{(t)} - \frac{1}{3}\sum\limits_{j = 1,j \ne i}^4 {{R_{ij}}(t)}, (9) 式中:{R}_{xii}为 {x}_{i} 的自协方差函数, {R}_{ij} 为 {x}_{i} 和 {x}_{j} 的协方差函数.
每一时刻第i路PRW定位单元的权重为
{\omega _i}(t) = \frac{1}{{{\sigma _i}{{(t)}^2}}} \frac{1}{{\displaystyle\sum\limits_{i = 1}^4 {\dfrac{1}{{{\sigma _i}{{(t)}^2}}}} }}. (10) 3) 将每一时刻四路PRW定位单元的速度测量值与其对应权重相乘得最终加权融合结果\hat x,如式(11).
\left\{ \begin{gathered} \hat x = \sum\limits_{i = 1}^4 {{x_i}{\omega _i}}, \\ \sum\limits_{i = 1}^4 {{\omega _i} = 1}, \\ {\sigma ^2} = \sum\limits_{i = 1}^4 {\omega _i^2\sigma _i^2} . \\ \end{gathered} \right. (11) 2.2 基于无迹卡尔曼滤波的高速磁浮列车测速方法
在列车实际运行过程中,系统噪声和量测噪声难以准确统计且系统模型为强非线性,因此,引入改进卡尔曼滤波算法,常见有扩展卡尔曼滤波(EKF)[10]、UKF[11]等. EKF将模型误差作为过程噪声处理,与实际不符,且当系统非线性较强时,滤波精度会降低[12]. 而UKF不需要对非线性系统进行线性化,在处理强非线性系统问题上比EKF有更高的精度和稳定性.
UKF的核心思想是采用UT (unscented transformation)变换,利用一组Sigma采样点描述随机变量的高斯分布,然后通过非线性函数的传递,利用加权统计线性回归技术来近似非线性函数的后验均值和方差.
UKF计算过程如下[13]:
1) 初始化
\hat {{{\boldsymbol{X}}_0}} = {{E}}\left[ {{{\boldsymbol{X}}_0}} \right], (12) {{\boldsymbol{L}}_0} = {{E}}\left[ {\left( {{{\boldsymbol{X}}_0} - \hat {{{\boldsymbol{X}}_0}} } \right){{\left( {{{\boldsymbol{X}}_0} - \hat {{{\boldsymbol{X}}_0}} } \right)}^{\text{T}}}} \right], (13) 式中: {\hat {\boldsymbol{X}}_0} 为初始时刻状态向量 {\boldsymbol{X}}_{0} 的均值, {{\boldsymbol{L}}}_{0} 为初始时刻状态向量 {\boldsymbol{X}}_{0} 的方差.
2) 计算Sigma点
采用基于Cholesky分解的对称采样策略进行Sigma点采样,计算2n + 1个Sigma点,如式(14),n为状态维数,本文中假设仅有一个速度状态变量.
\left\{\begin{array}{l} \lambda=(n+\kappa)\alpha^2-n, \\ \boldsymbol{\chi}_{k-1}=\left[\begin{array}{c} \hat{\boldsymbol{X}}_{k-1} \\ \hat{\boldsymbol{X}}_{k-1}+\sqrt{(n+\lambda) \boldsymbol{L}_{k-1}} \\ \hat{\boldsymbol{X}}_{k-1}-\sqrt{(n+\lambda) \boldsymbol{L}_{k-1}} \end{array}\right], \end{array}\right. (14) 式中:λ为尺度因子;α为比例缩放因子,0≤α≤1,常取极小的正数,本文α=10−3;κ为比例因子,常取0或3−n,此处κ=0; {\boldsymbol{\chi }}_{\mathit{k}-1} 为k−1时刻的Sigma点;{\hat {\boldsymbol{X}} _{k - 1}}为k−1时刻的状态估计值; {\boldsymbol{L}}_{k-1} 为k−1时刻状态向量的方差.
对应权值为
\left\{ \begin{gathered} {W}_{{\mathrm{a}}0,n} = \lambda /(n + \lambda ), \\ {W}_{{\mathrm{b}}0,c} = \lambda /(n + \lambda ) + (1 - {\alpha ^2} + \beta ), \\ {W}_{{\mathrm{a}}l,n} = {W_{l,c}} = 1/[2(n + \lambda )], \quad l = 1,2, \cdots ,2n , \\ \end{gathered} \right. (15) 式中:{W}_{{\mathrm{a}}0,n}为初始状态n维状态参数均值的权值;{W}_{{\mathrm{b}}0,c}为初始状态c维状态参数方差的权值;{W}_{{\mathrm{a}}l,n}为第l个n维状态参数均值的权值;{W}_{{\mathrm{b}}l,c}为第l个c维状态参数方差的权值;β用于融入{{\boldsymbol{\chi }}_l}的先验信息,β≥0,本文β=2.
3) 时间更新
利用非线性测量函数(式(16))计算k时刻系统状态、均值和协方差的单步预测[13].
\left\{\begin{array}{l} {\boldsymbol{\chi}}_{k \mid k-1}=f\left({\boldsymbol{\chi}}_{k-1}\right) ,\\ \hat{\boldsymbol{X}}=\displaystyle\sum_{l=0}^{2 n} W_{{\mathrm{a}}l, n} {\boldsymbol{\chi}}_{l, k| k-1}, \\ \boldsymbol{P}_{k \mid k-1}=\displaystyle\sum_{l=0}^{2 n} W_{{\mathrm{b}} l, c}\bigg[\left({\boldsymbol{\chi}}_{l, k \mid k-1}-\hat{\boldsymbol{X}}_{k \mid k-1}\right)\bigg. \times \\ \quad \left.\left({\boldsymbol{\chi}}_{l|k| k-1}-\hat{\boldsymbol{X}}_{k \mid k-1}\right)^{\mathrm{T}}\right]+\boldsymbol{Q}_k, \end{array}\right. (16) 式中:{{\boldsymbol{\chi }}_{k|k - 1}}为k−1时刻到k时刻的Sigma点, {\hat {\boldsymbol{X}}_{k\left| {k - 1} \right.}}为k−1时刻到k时刻系统状态预测估计值,{{\boldsymbol{\chi }}_{l,k|k - 1}}为{{\boldsymbol{\chi }}_{k|k - 1}}的第l列,{{\boldsymbol{P}}_{k|k - 1}}为状态预测估计的协方差矩阵,{{\boldsymbol{Q}}_k}为过程噪声协方差矩阵.
4) 测量更新
与时间更新过程相似,测量更新过程如下:
\left\{ \begin{gathered} {{\boldsymbol{Z}}_{k|k - 1}} = g({{\boldsymbol{\chi }}_{k|k - 1}}), \\ {\hat {\boldsymbol{Z}} _k} = \sum\limits_{l = 0}^{2n} {W_{{\mathrm{a}}l,n}{{\boldsymbol{Z}}_{l,k|k - 1}}}, \\ {{\boldsymbol{P}}_{{\mathrm{zz}},k}} = \sum\limits_{l = 0}^{2n} {W_{{\mathrm{a}}l,n}({{\boldsymbol{Z}}_{l,k|k - 1}} - {{\hat {\boldsymbol{Z}} }_k}){{({{\boldsymbol{Z}}_{l,k|k - 1}} - {{\hat {\boldsymbol{Z}} }_k})^{\text{T}}}} + {{\boldsymbol{R}}_k}}, \\ \end{gathered} \right. (17) 式中:{{\boldsymbol{Z}}_{k|k - 1}}为k−1时刻到k时刻的预测观测值,{\hat {\boldsymbol{Z}}_k}为k时刻的观测值,{{\boldsymbol{Z}}_{l,k|k - 1}}为{{\boldsymbol{Z}}_{k|k - 1}}的第l列, {\boldsymbol{P}}_{{\mathrm{zz}},k} 为{\hat {\boldsymbol{Z}}_k}的协方差矩阵, {\boldsymbol{R}}_{k} 为k时刻测量噪声协方差矩阵.
5) 滤波增益
基于时间更新和量测更新,k时刻的滤波增益矩阵、估计值和协方差矩阵计算过程如式(18).
\left\{ \begin{gathered} {{\boldsymbol{P}}_{{\mathrm{xz}},k}} = \sum\limits_{l = 0}^{2n} {W_{{\mathrm{b}}l,c}({{\boldsymbol{\chi }}_{l,k|k - 1}} - {{\hat {\boldsymbol{X}}}_{k|k - 1}}){{({{\boldsymbol{Z}}_{l,k|k - 1}} - {{\hat {\boldsymbol{Z}}}_k})}^{\mathrm{T}}}}, \\ {{\boldsymbol{K}}_k} = {{\boldsymbol{P}}_{{\mathrm{xz}},k}}{{\boldsymbol{P}}_{{\mathrm{zz}},k}^{ - 1}}, \\ {\hat {\boldsymbol{X}} _k} = {\hat {\boldsymbol{X}} _{k|k - 1}} + {{\boldsymbol{K}}_k}({{\boldsymbol{Z}}_k} - {\hat {\boldsymbol{Z}}_k}) , \\ {{\boldsymbol{P}}_k} = {{\boldsymbol{P}}_{k|k - 1}} - {{\boldsymbol{K}}_k}{{\boldsymbol{P}}_{{\mathrm{zz}},k}}{\boldsymbol{K}}_k^{\text{T}} , \\ \end{gathered} \right. (18) 式中: {\boldsymbol{P}}_{{\mathrm{xz}},k} 为预测状态向量协方差矩阵, {\boldsymbol{K}}_{k} 为k时刻滤波增益矩阵, {\boldsymbol{Z}}_{\mathit{k}} 为k时刻观测向量, {\boldsymbol{P}}_{k} 为{\hat {\boldsymbol{X}}_k}的协方差矩阵.
将4路PRW定位信号经速度预处理和自适应加权融合算法处理后得到列车速度V(t),如式(19).
V\left(t\right)=\sum _{i=1}^{4}{\omega }_{i}\left(t\right) {v}_{i}(t),\quad t=\mathrm{1,2},\cdots, 5\;695, (19) 式中: {v}_{i}\left(t\right) 为t时刻第i路PRW速度.
将所得速度代入无迹卡尔曼滤波器中,根据观测系统本身所处数量级,系统过程噪声取值为0.01,将测量噪声设置为0.1,取样时间\Delta t=0.02 s. 通过UT变换对定位信息概率密度逼近,并通过Cholesky分解直接预测状态误差协方差,减小了噪声对计算结果的影响.
3. 测速定位算法验证分析
3.1 测速定位在环测试工况
基于青岛四方高速磁浮列车试验线,利用实时获取与交互的高速磁浮测速定位在环系统时空数据进行测速定位算法效果分析,如图3.
该在环测试设备针对轨道长度、弯道参数、列车运行速度曲线、运行时间等信息,可以自动生成给定列车运行状态下的ORT报文信号. 报文信号涵盖实际系统误差信息,将通信报文通过相应的信号转换传输给车载安全计算机,仿真系统与真实车载设备连接,在列车静止条件下,实现向磁浮列车安全计算机(VSC)传递列车运动状态信息的功能.
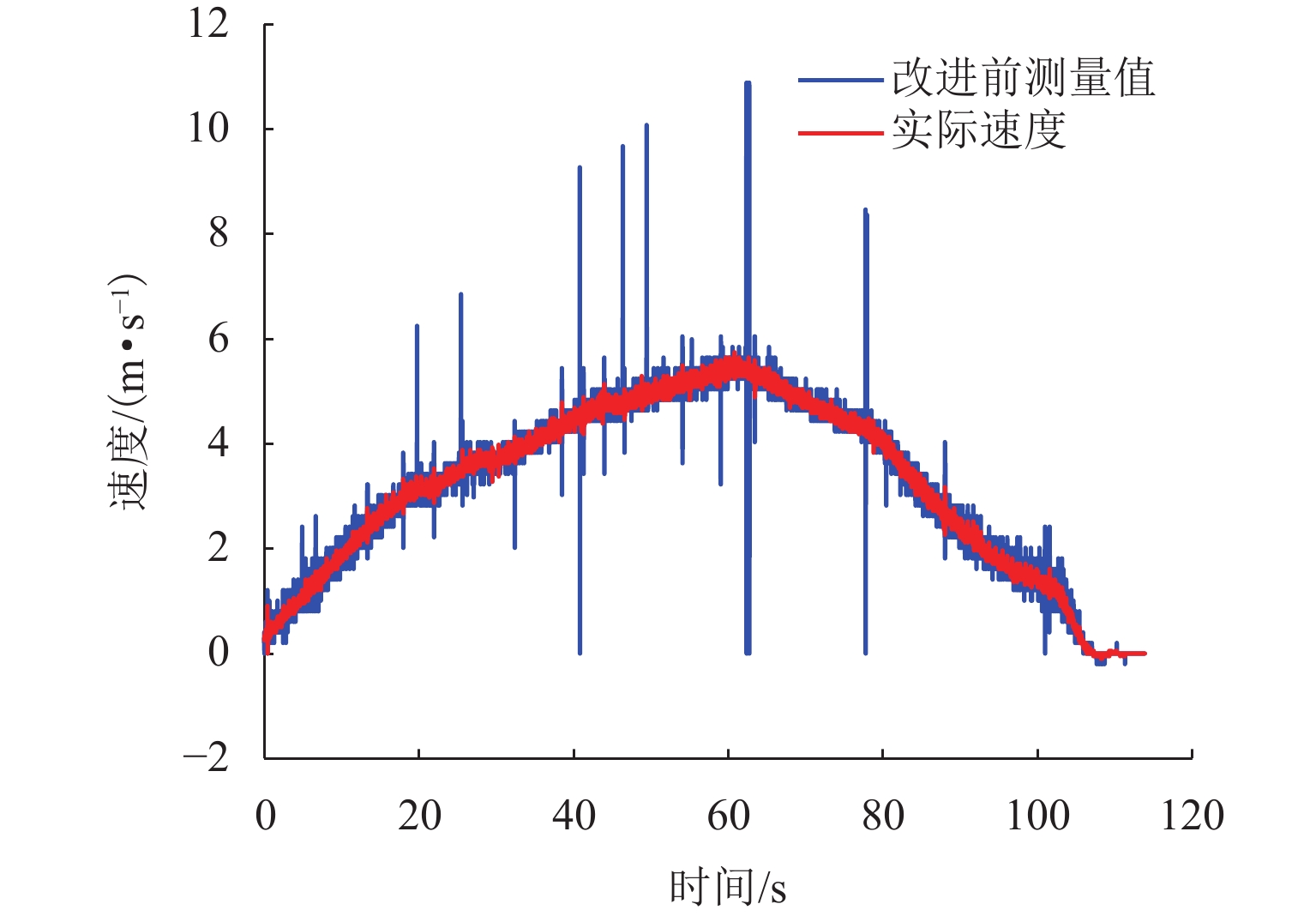
使用高速磁浮列车车载环境模拟与在环测试设备进行了测速定位系统运行工况测试,初始速度为0.2 m/s,以2.5 m/s2的加速度开始运行,达到速度5.6 m/s后,以2.5 m/s2的减速度继续行驶,最终行驶到506.4 m处速度为0,通信时间为0.02 s. 以同一时刻列车头尾四路的平均位置为列车实际位置,将相邻时刻的实际位置之差除以通信时间,得到实际速度. 由测速定位系统传感器测量值直接平均处理计算得到的车速值与实际速度对比,见图4. 由图4可知:列车速度测量值多处出现速度突变,并且在列车运行过程中出现速度为0的情况;测量值距真实值有较大误差,速度误差最大达5.6 m/s,测速定位测量值待优化,以避免运控系统由于速度突变引起牵引力的频繁调节,减少牵引电机功率损耗.
3.2 测速定位效果分析
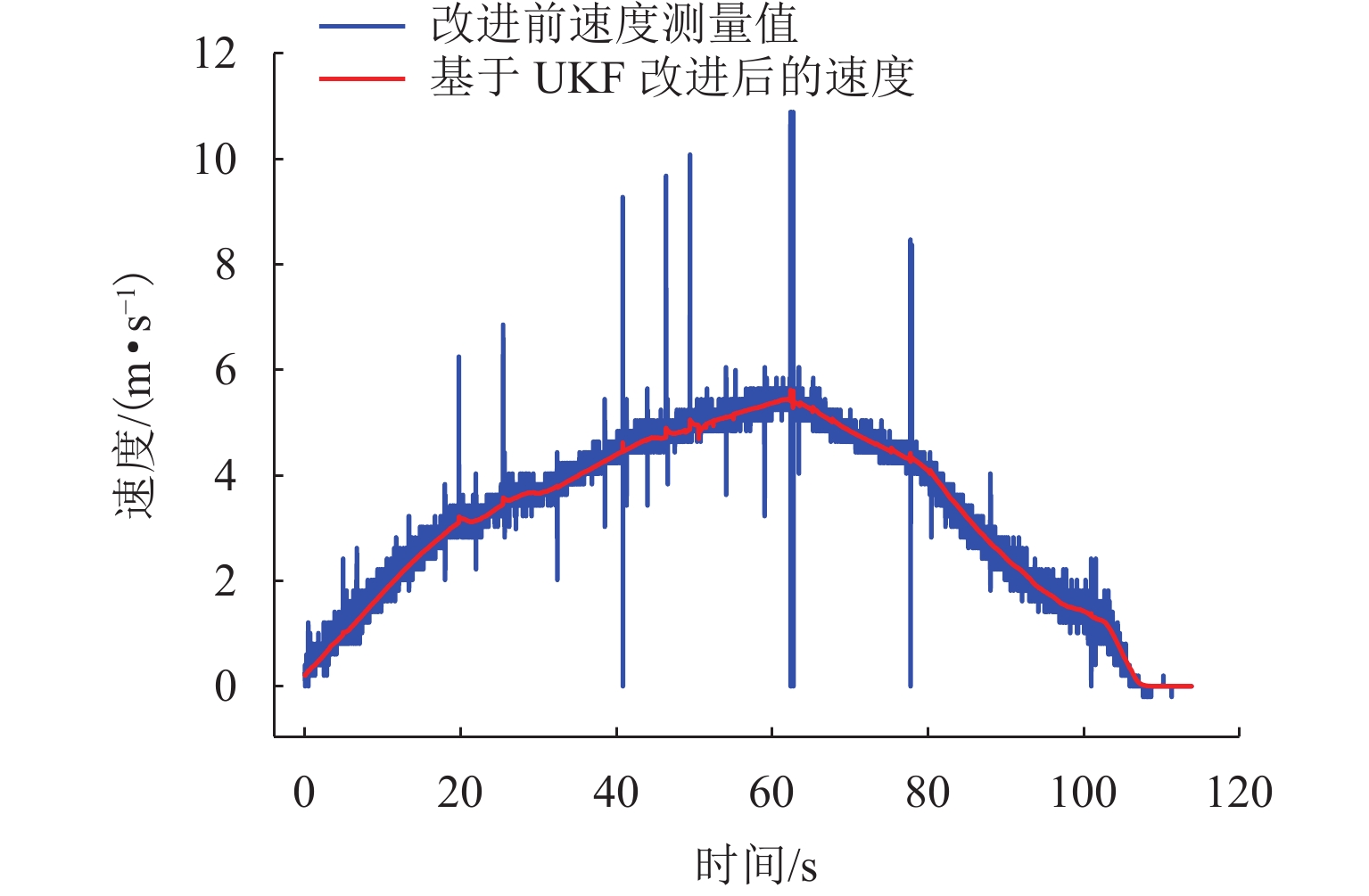
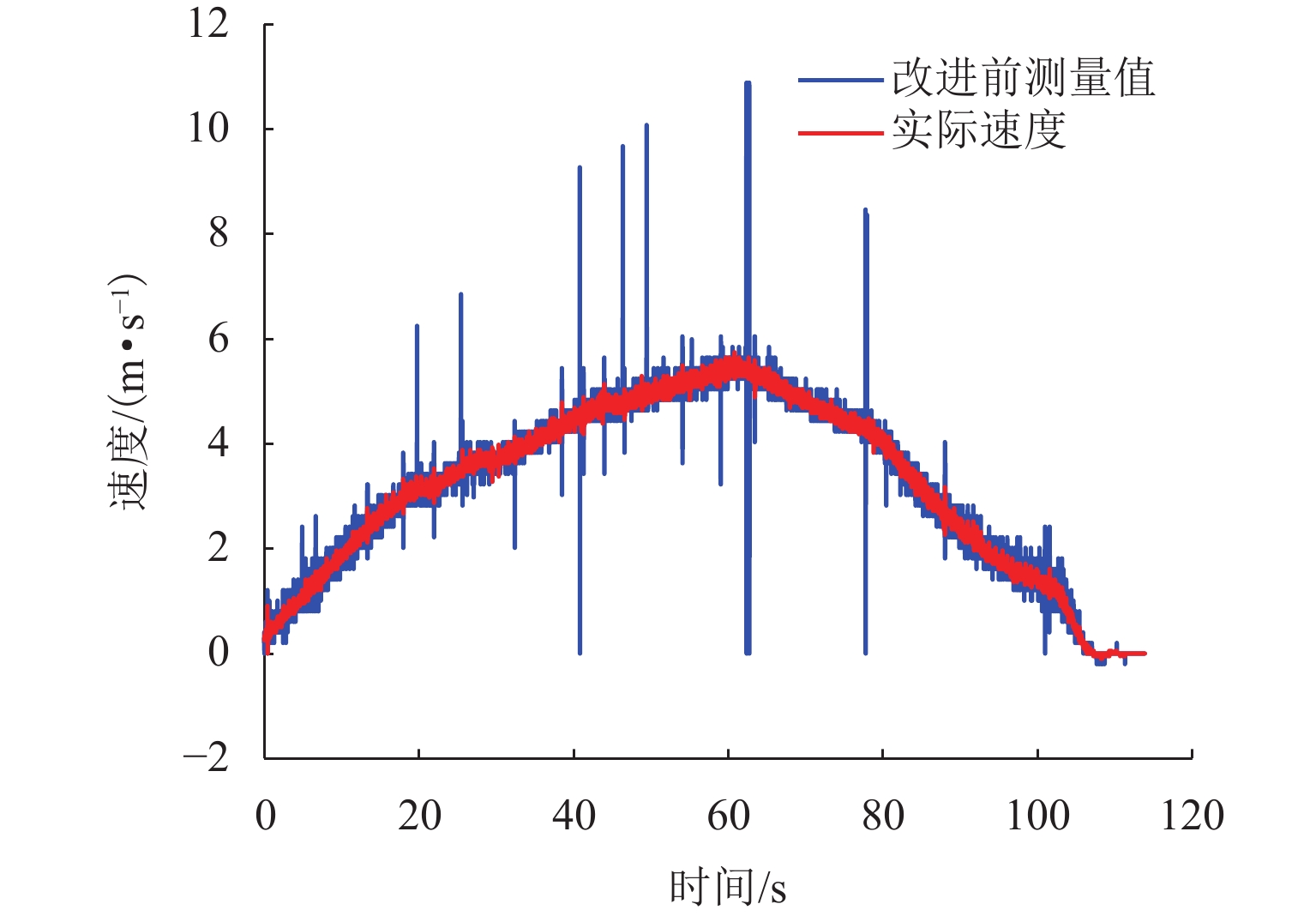
基于加权融合UKF的常导高速磁浮列车测速定位算法的定位测速结果如图5所示.
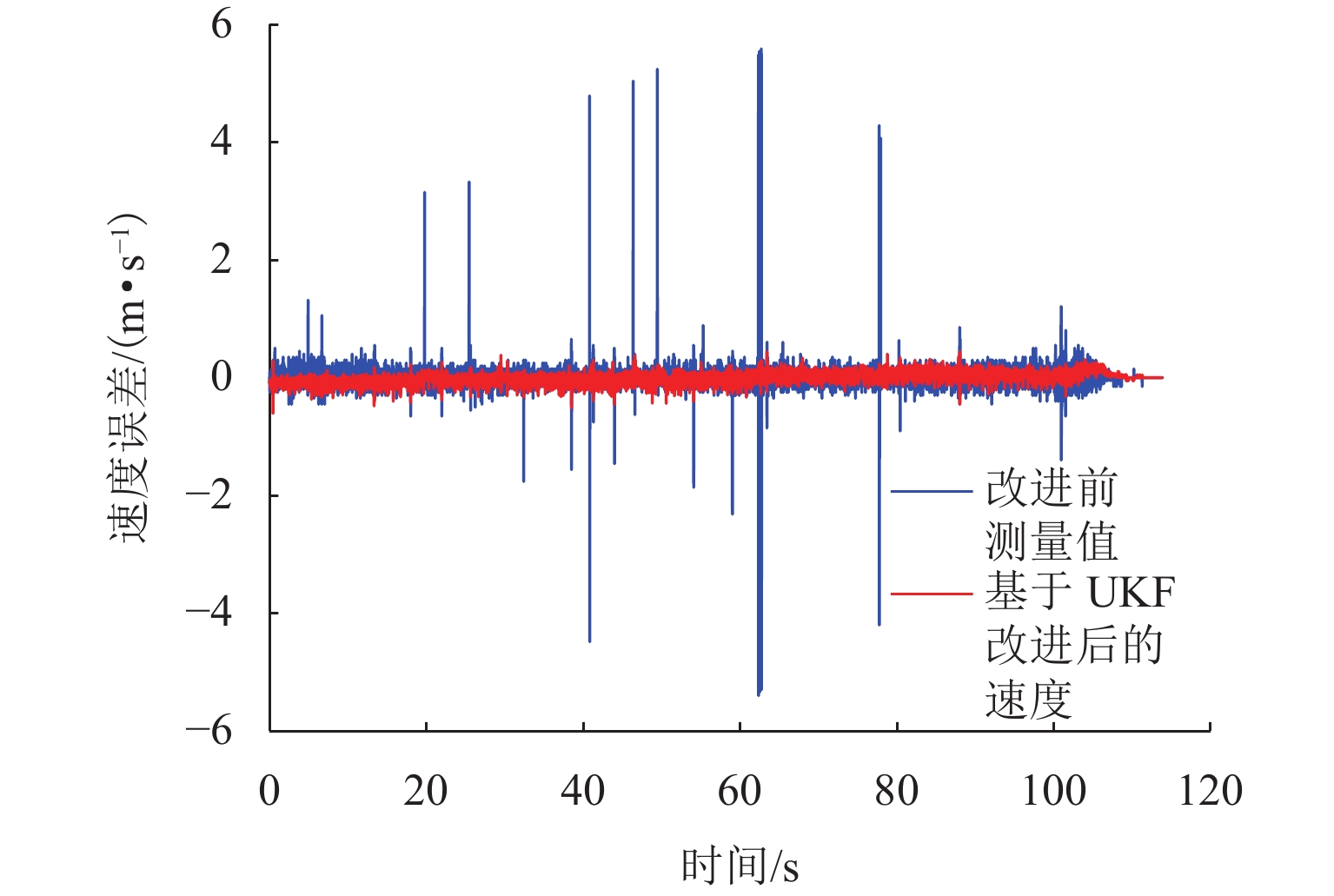
 图 5 速度测量值与基于加权融合的UKF改进速度对比Figure 5. Comparison of measured speed and speed after application of UKF based on weighted fusion
图 5 速度测量值与基于加权融合的UKF改进速度对比Figure 5. Comparison of measured speed and speed after application of UKF based on weighted fusion由图5可知:经UKF改进后的测速定位曲线能较好地跟踪其真实轨迹,检测速度精度得到有效改善;改进前速度测量值极差为11.09 m/s,改进后速度极差为5.62 m/s,速度极差降低了49.3%.
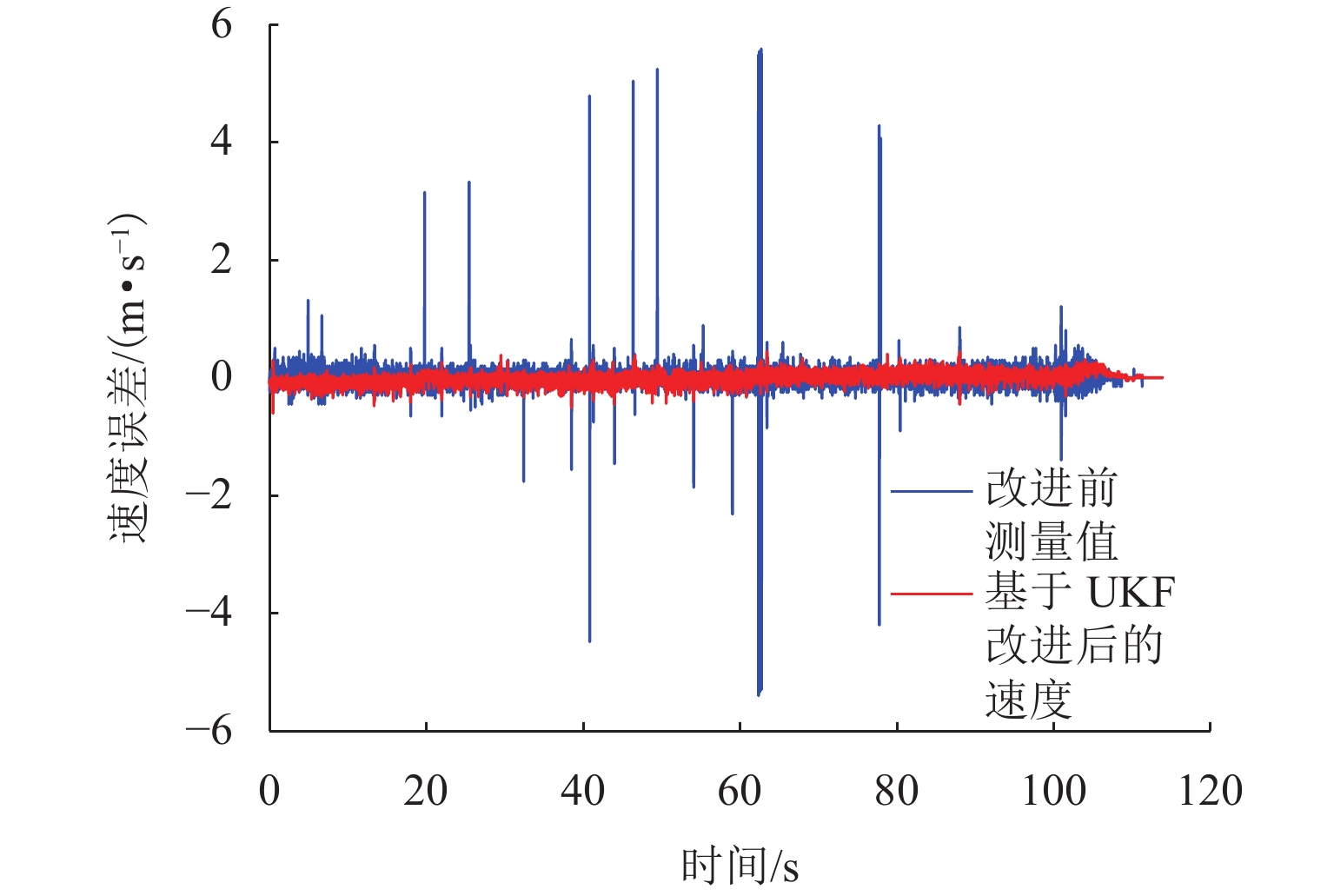
改进前后的速度误差对比如图6所示,改进前平均速度误差为0.12 m/s. 经UKF改进后,其速度误差明显减小,平均速度误差为0.08 m/s,减小了32.6%. 并且,改进后测速误差基本稳定在0.44 m/s以内,满足测速定位精度要求.
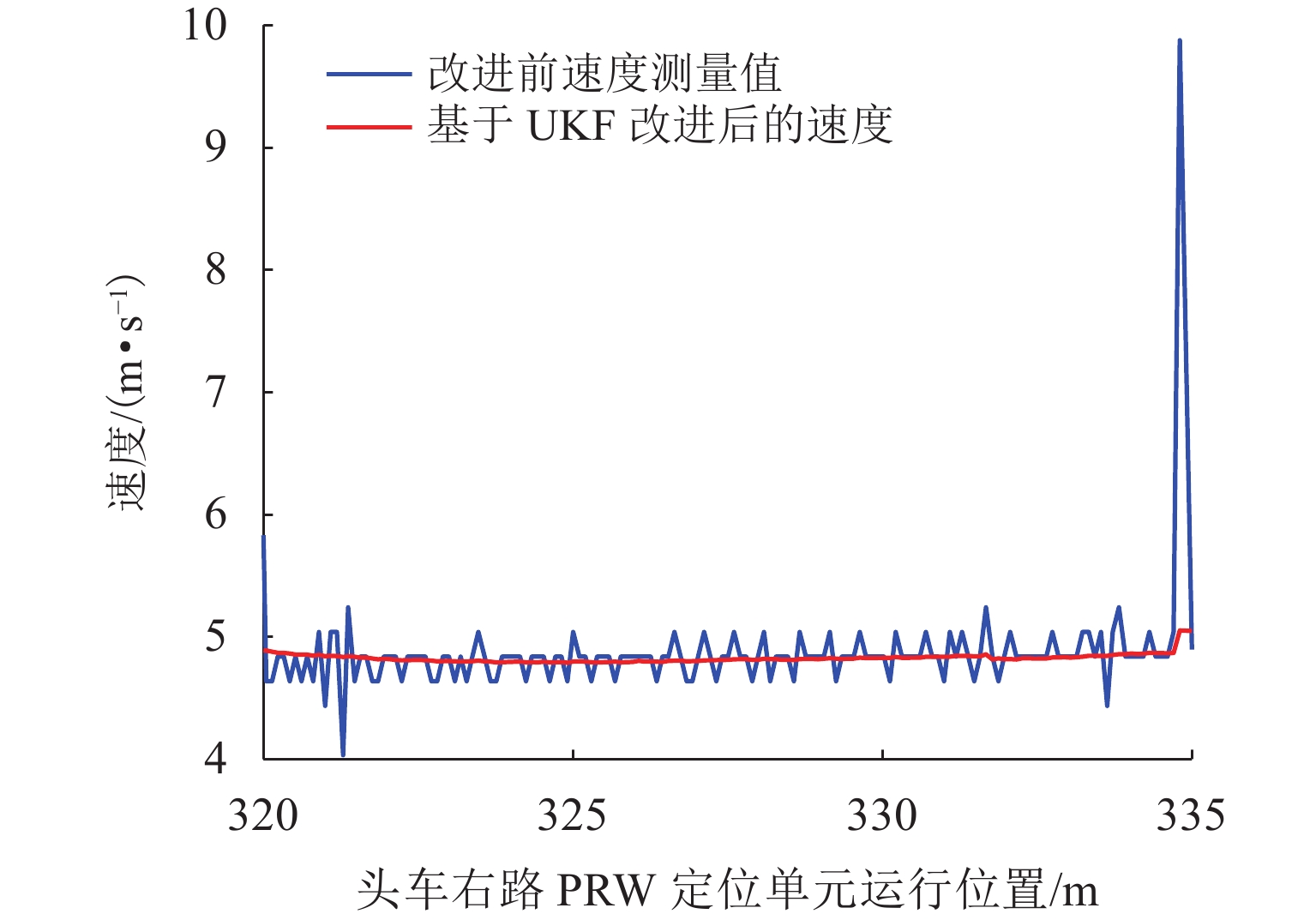
头车右路速度测量值与应用基于加权融合的UKF的速度对比如图7所示.
 图 7 头车右路速度测量值与应用基于加权融合的UKF算法后的速度对比Figure 7. Comparison of measured right-channel speeds of head train and speed after application of UKF algorithm based on weighted fusion
图 7 头车右路速度测量值与应用基于加权融合的UKF算法后的速度对比Figure 7. Comparison of measured right-channel speeds of head train and speed after application of UKF algorithm based on weighted fusion由图7可知,以头车右路PRW定位单元320~335 m运行距离的速度变化为例. 经统计,速度测量值的平均速度为4.86 m/s,速度极差为5.85 m/s;改进后平均速度为4.82 m/s,速度极差为0.29 m/s. 且改进后的速度波动明显小于速度测量值,数据变化更加平滑且趋于平稳,可视为匀速运动. 说明应用基于加权融合UKF的常导高速磁浮列车测速定位算法可以使速度波动减小,有效减小信号干扰等因素的不良影响,磁浮列车定位更加准确.
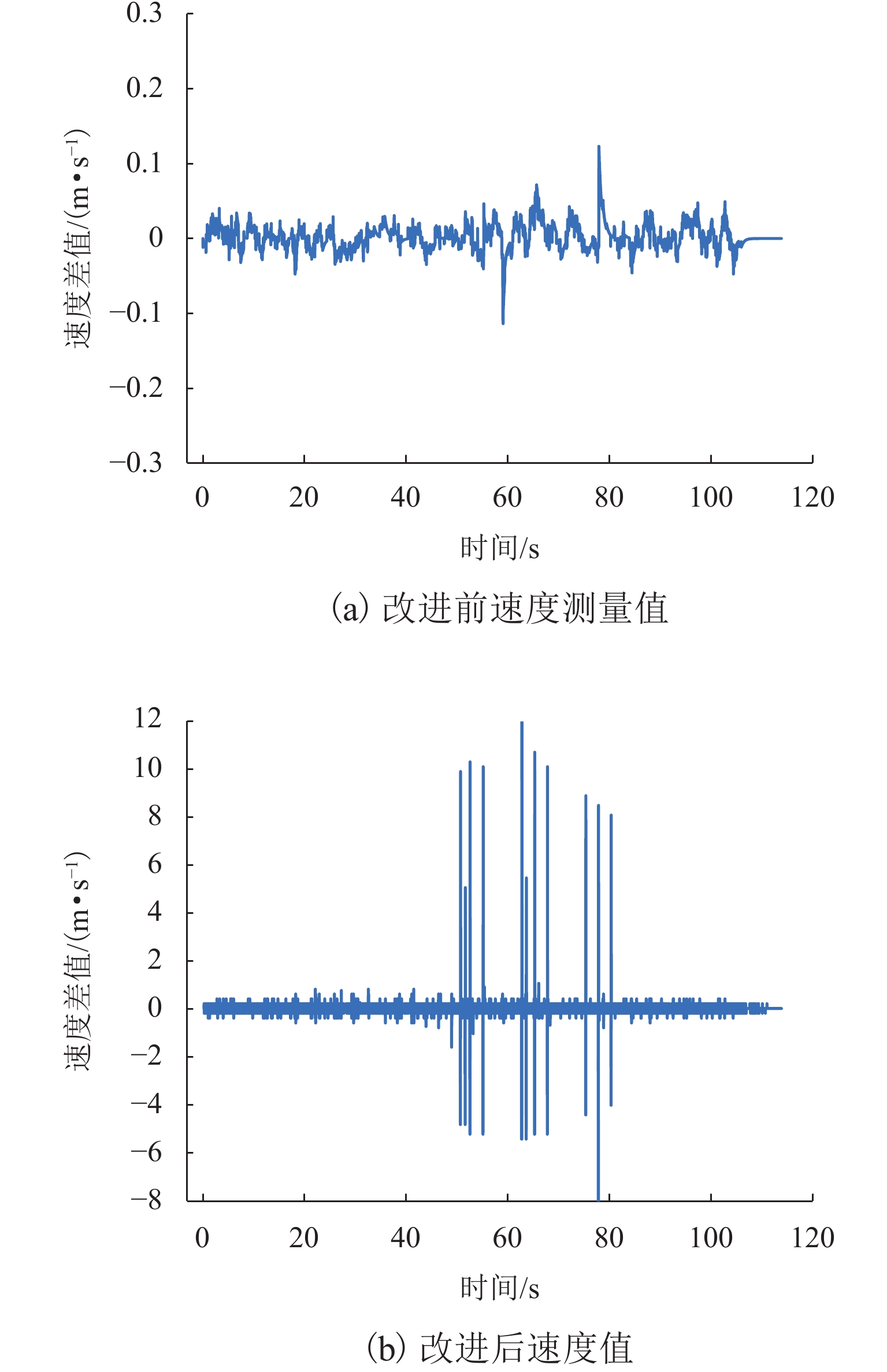
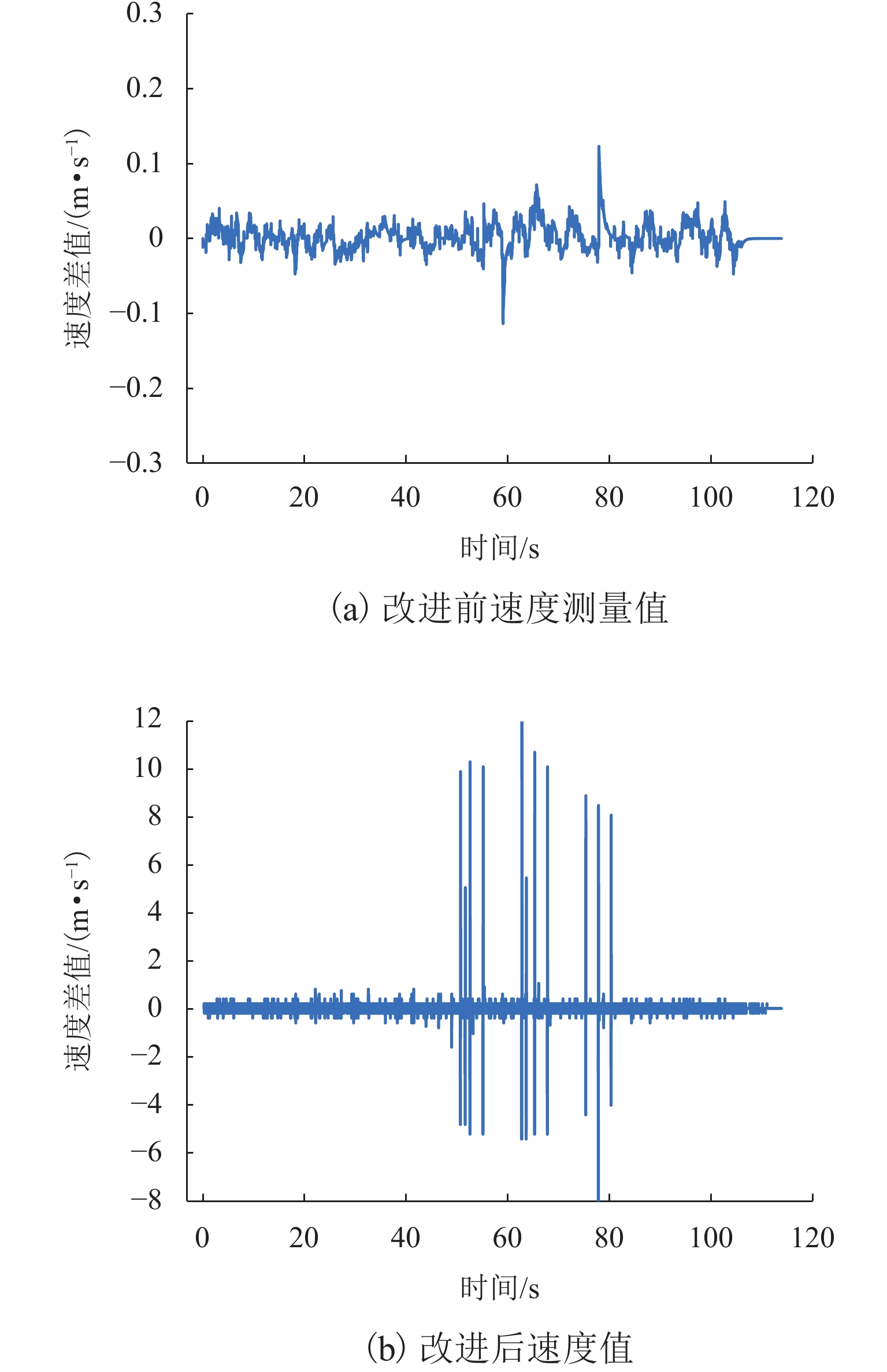
图8所示为采用基于加权融合UKF的常导高速磁浮列车测速定位算法改进前、后的头车左、右两路速度差值.
 图 8 采用基于加权融合的UKF改进前、后的头车左、右两路速度差值Figure 8. Difference between right/left-channel speeds of head train before and after application of UKF based on weighted fusion
图 8 采用基于加权融合的UKF改进前、后的头车左、右两路速度差值Figure 8. Difference between right/left-channel speeds of head train before and after application of UKF based on weighted fusion由图8(a)可知:同一时刻头车左右两路的速度测量值的差值最大达21.57 m/s,误差明显. 经改进后如图8(b)的头车左右路差值基本稳定在0.12 m/s内. 采用基于加权融合UKF的常导高速磁浮列车测速定位算法可以有效消除速度突变,减小相邻时刻速度变化,减小列车输出牵引力波动.
4. 结 论
基于长定子齿槽检测测速定位方法的不足,提出了加权融合的UKF对高速磁浮列车定位算法进行优化,并通过硬件在环仿真分析该算法的测速定位效果,仿真结果表明:本文所提出的方法能够有效消除定位信号采集噪声,显著提高了基于长定子齿槽检测测速定位方法的可靠性及精确性,使得车载计算机能够准确地对列车的行驶情况做出判断和估计,保证牵引系统高效工作. 为后续高速工况下的稳定可靠运行测试提供了有效的数据基础.
致谢:感谢中车青岛四方机车车辆股份有限公司高速磁浮运载技术全国重点实验室对本文工作的支持.
-
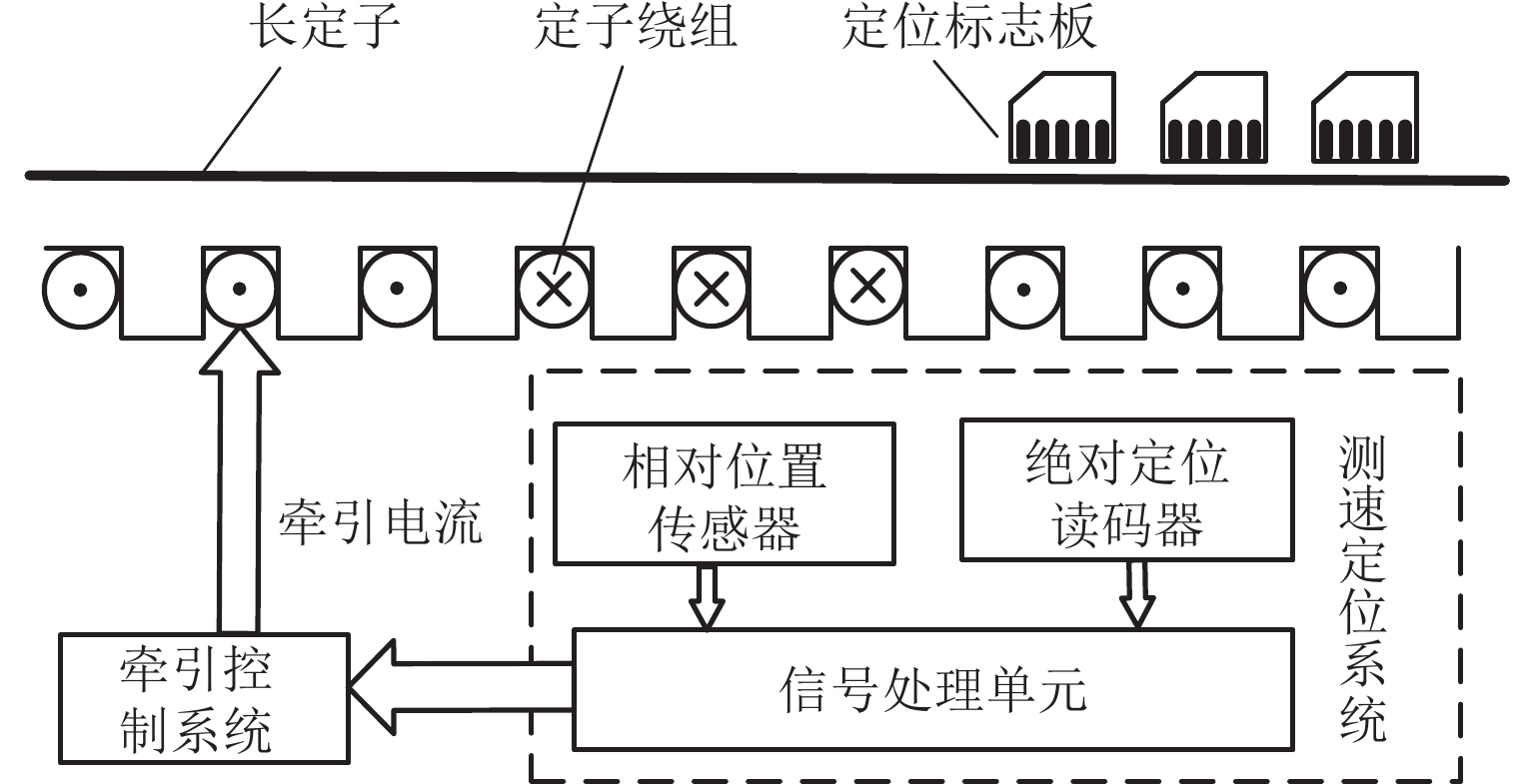
图 1 基于长定子齿槽检测的测速定位示意
Figure 1. Speed measurement and positioning based on tooth slot detection of long stator
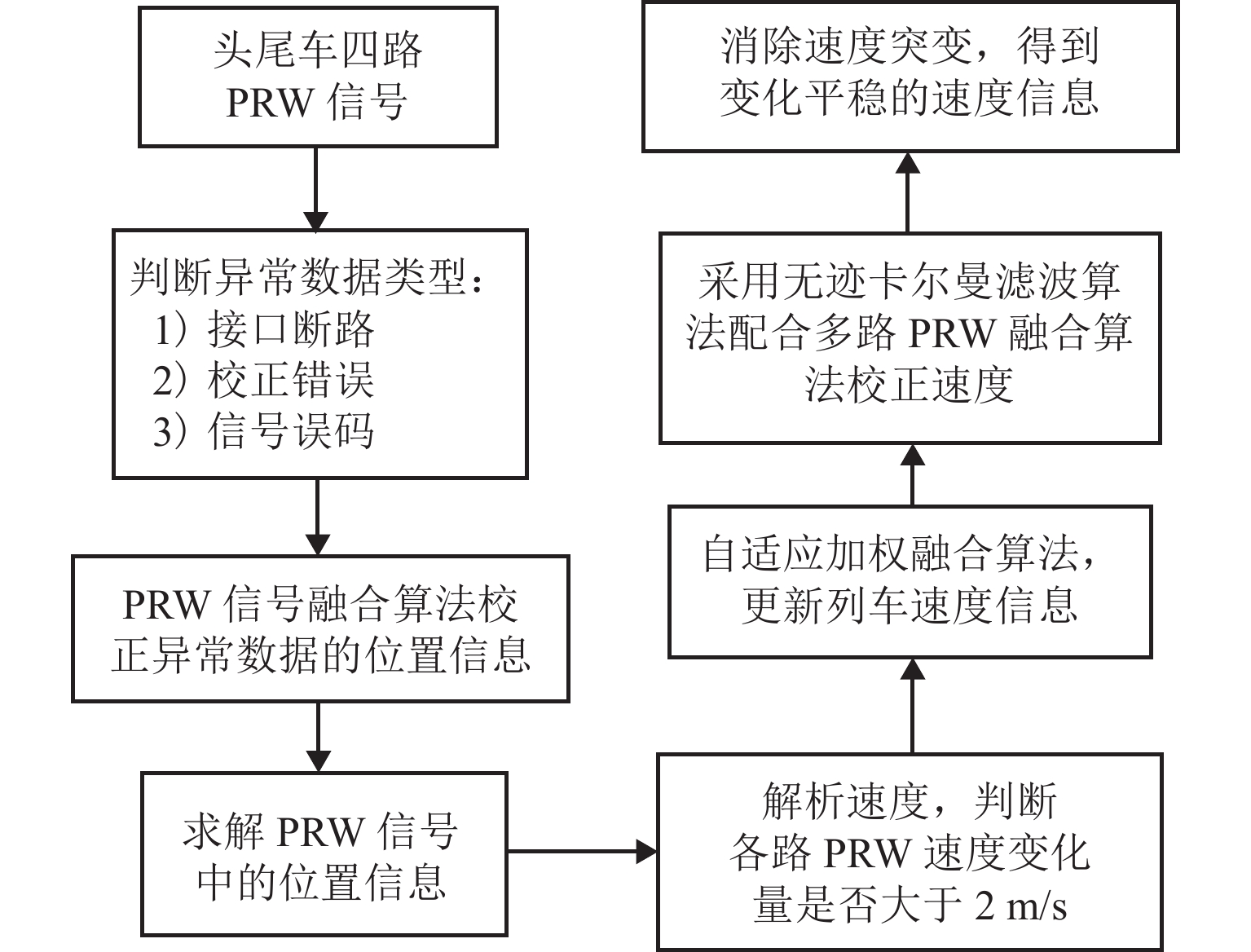
图 2 多路定位信号融合算法流程
Figure 2. Flowchart of multi-channel positioning signal fusion algorithm
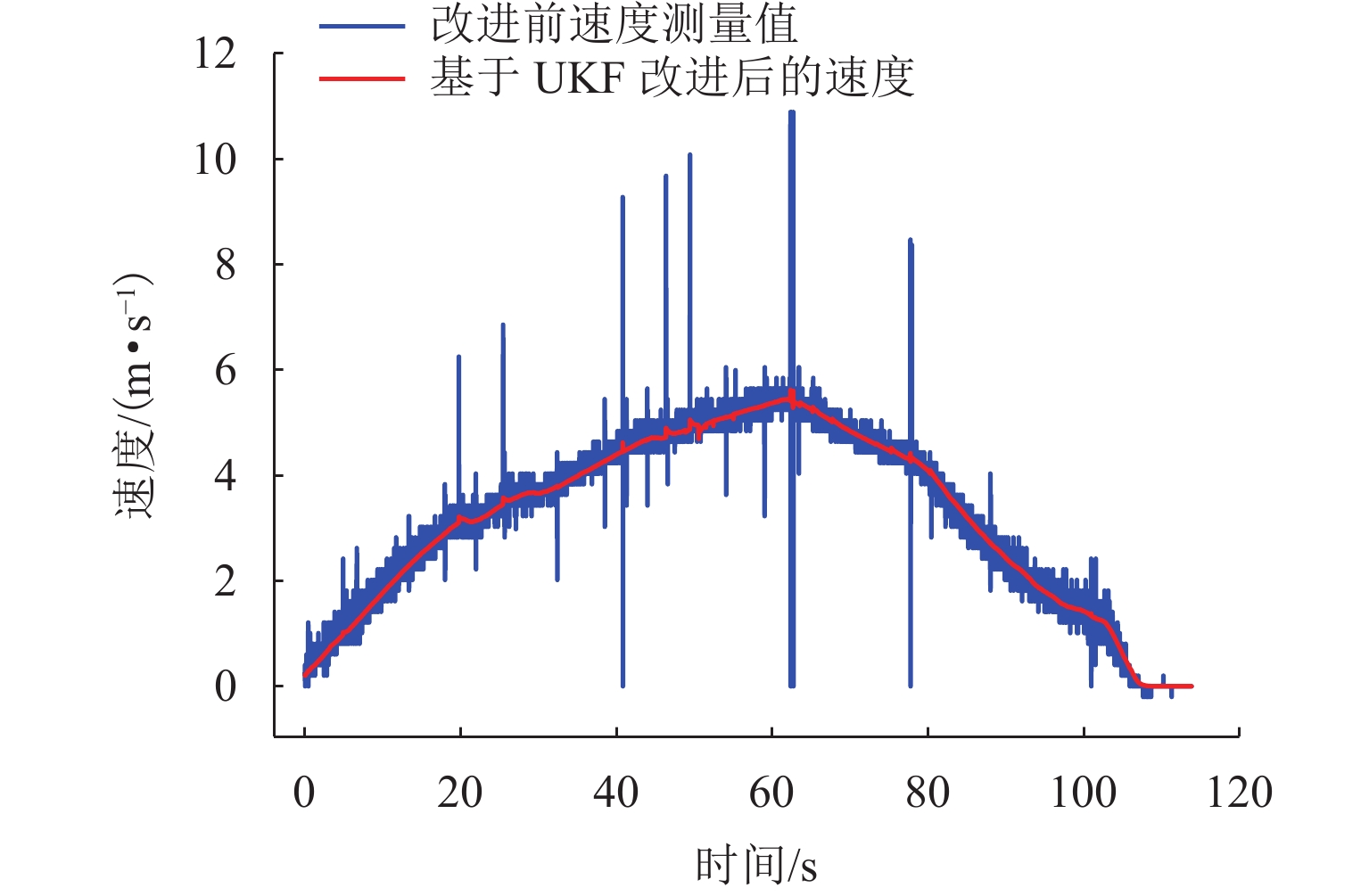
图 5 速度测量值与基于加权融合的UKF改进速度对比
Figure 5. Comparison of measured speed and speed after application of UKF based on weighted fusion
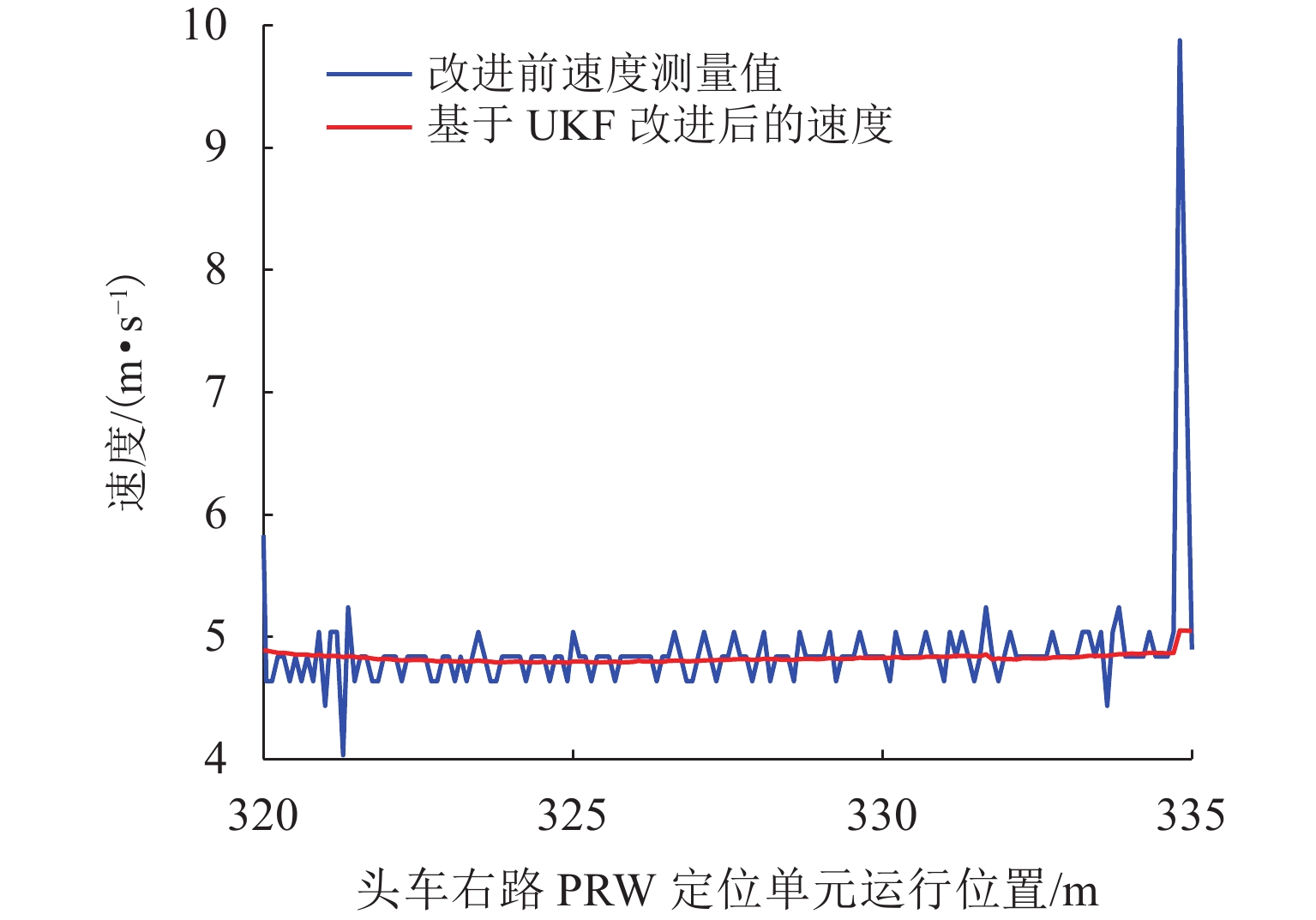
图 7 头车右路速度测量值与应用基于加权融合的UKF算法后的速度对比
Figure 7. Comparison of measured right-channel speeds of head train and speed after application of UKF algorithm based on weighted fusion
-
[1] 邹逸鹏. 高速磁浮列车系统动力学仿真与参数优化研究[D]. 成都: 西南交通大学,2021. [2] 蔡煊,王长林. 基于改进UKF的BDS/IMU组合列车定位方法[J]. 西南交通大学学报,2020,55(2): 393-400.CAI Xuan, WANG Changlin. BeiDou navigation satellite system/inertial measurement unit integrated train positioning method based on improved unscented Kalman filter algorithm[J]. Journal of Southwest Jiaotong University, 2020, 55(2): 393-400. [3] SAAB S S. A map matching approach for train positioning I: development and analysis[J]. IEEE Transactions on Vehicular Technology, 2000, 49(2): 467-475. doi: 10.1109/25.832978 [4] 亓宝进. 磁浮列车测速定位系统硬件在环仿真系统研究[D]. 北京: 北京交通大学,2022. [5] 孟川舒. 高速磁浮列车测速定位问题综述[J]. 铁道标准设计,2024,68(1): 178-184,211.MENG Chuanshu. Review on problems of speed measurement and positioning of high speed maglev train[J]. Railway Standard Design, 2024, 68(1): 178-184,211. [6] 张世聪. 适用于磁浮列车的测速定位方法研究综述[J]. 铁道标准设计,2018,62(10): 186-191.ZHANG Shicong. Research review of speed and position detection methods applied to maglev trains[J]. Railway Standard Design, 2018, 62(10): 186-191. [7] 罗桂斌. 高速磁浮定位测速系统信号处理技术研究[D]. 长沙: 国防科技大学,2017. [8] 窦峰山,何洪礼,谢云德,等. 基于跟踪微分器的磁浮列车定位测速系统信号处理问题研究[J]. 铁道学报,2016,38(1): 81-85.DOU Fengshan, HE Hongli, XIE Yunde, et al. Research on the signal processing of position and speed detection system in maglev train based on tracking differentiator[J]. Journal of the China Railway Society, 2016, 38(1): 81-85. [9] 吴峻,周文武,李璐. 高速磁浮列车测速定位系统的研究[J]. 国防科技大学学报,2011,33(1): 109-114.WU Jun, ZHOU Wenwu, LI Lu. Research on speed and position detection system of high speed maglev train[J]. Journal of National University of Defense Technology, 2011, 33(1): 109-114. [10] 唐志一,蔡颖,王会. 基于自适应加权算法的多传感器数据融合方法[J]. 指挥信息系统与技术,2022,13(5): 66-70.TANG Zhiyi, CAI Ying, WANG Hui. Multi-sensor data fusion method based on adaptive weighting algorithm[J]. Command Information System and Technology, 2022, 13(5): 66-70. [11] 张亮. 基于EKF的GPS/ODO列车定位方法研究[D]. 北京: 北京交通大学,2016. [12] JIANG Z Q, LIU C H, ZHANG G, et al. GPS/INS integrated navigation based on UKF and simulated annealing optimized SVM[C]//2013 IEEE 78th Vehicular Technology Conference. Las Vegas: IEEE, 2013: 1-5. [13] 赵玏洋,闫利. 移动机器人SLAM位姿估计的改进四元数无迹卡尔曼滤波[J]. 测绘学报,2022,51(2): 212-223.ZHAO Leyang, YAN Li. Advanced quaternion unscented Kalman filter based on SLAM of mobile robot pose estimation[J]. Acta Geodaetica et Cartographica Sinica, 2022, 51(2): 212-223. 期刊类型引用(1)
1. 万俊豪,左建勇,丁景贤,潘宇. 基于新息自适应卡尔曼滤波地铁测速定位方法. 仪器仪表学报. 2025(01): 236-246 .  百度学术
百度学术其他类型引用(0)
-

 下载:
下载:

 下载:
下载:

 百度学术
百度学术
 点击查看大图
点击查看大图
计量
- 文章访问数: 367
- HTML全文浏览量: 237
- PDF下载量: 54
- 被引次数: 1