

Modelling Passenger Evacuation from Metro Platforms Considering Passenger Flow Guidance and Small Group Behaviour
-
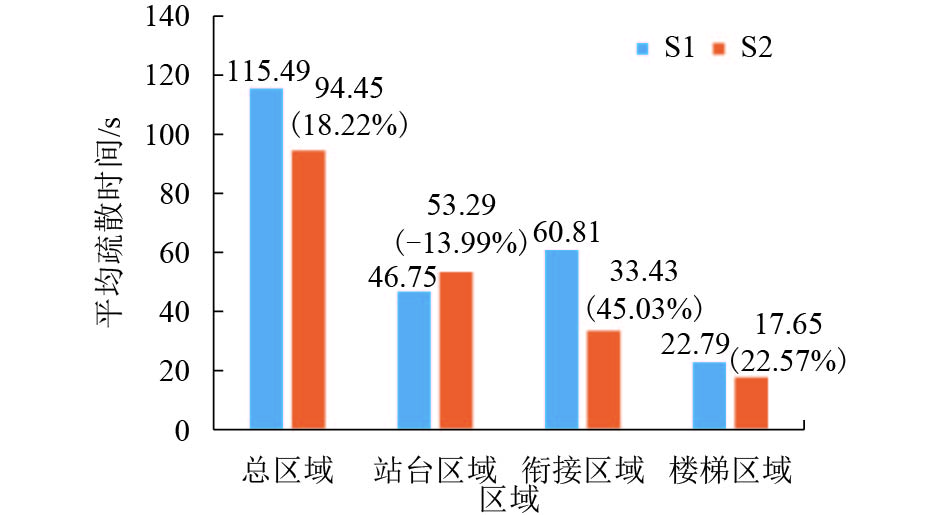
摘要: 地铁车站疏散过程客流引导及小群体行为均对人员疏散行为及疏散结果产生较大影响. 为更加有效地模拟真实疏散情况,研究了考虑客流引导和小群体行为的社会力模型. 该模型通过分析小群体运动特征及客流引导策略对行人期望速度的影响,对既有社会力模型进行修正;针对地铁车站站台人员疏散过程,设计更贴近实际情况的多智能体感知及决策流程,构建基于多智能体技术的疏散仿真模型. 以北京地铁西直门2号线站台为研究对象展开研究,结果表明客流引导及小群体效应对疏散时间、疏散效率、瓶颈区域及绕行距离均有显著影响:客流引导可提高疏散效率18%~45%,小群体行为则会增加绕行距离17%.Abstract: Passenger flow guidance and small group behaviour during the actual evacuation process in metro stations greatly affect the behaviours of individual passengers and the evacuation result. To make a better simulation on the actual evacuation situation, the social force model was explored, which can take into account passenger flow guidance and small group behaviour. The model was modified by analysing the influence of passenger flow guidance and small group behaviour on the expected velocity of passengers. A multi-agent technique that involves realistic perception and decision processes was employed to develop a model for simulating passenger evacuation from a metro platform. Xizhimen metro station in Beijing was used as a case study object to verify the proposed model. Results indicate that both passenger flow guidance and small group behaviour have obvious effects on the evacuation time and efficiency, bottleneck areas, and detour distances. Passenger flow guidance increases the evacuation efficiency by 18%-45% and small group behaviour leads to an increase of 17% in the detour distance.
-
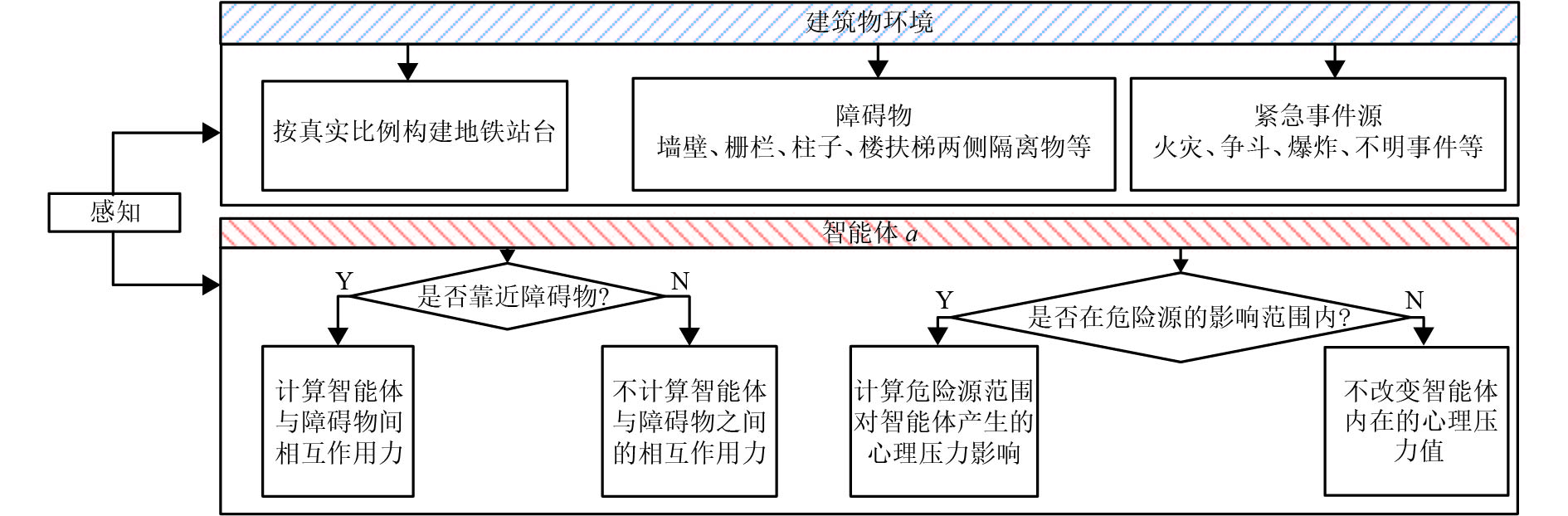
图 1 智能体感知环境模型的流程
Figure 1. Flowchart of agent perception model for evacuation environment

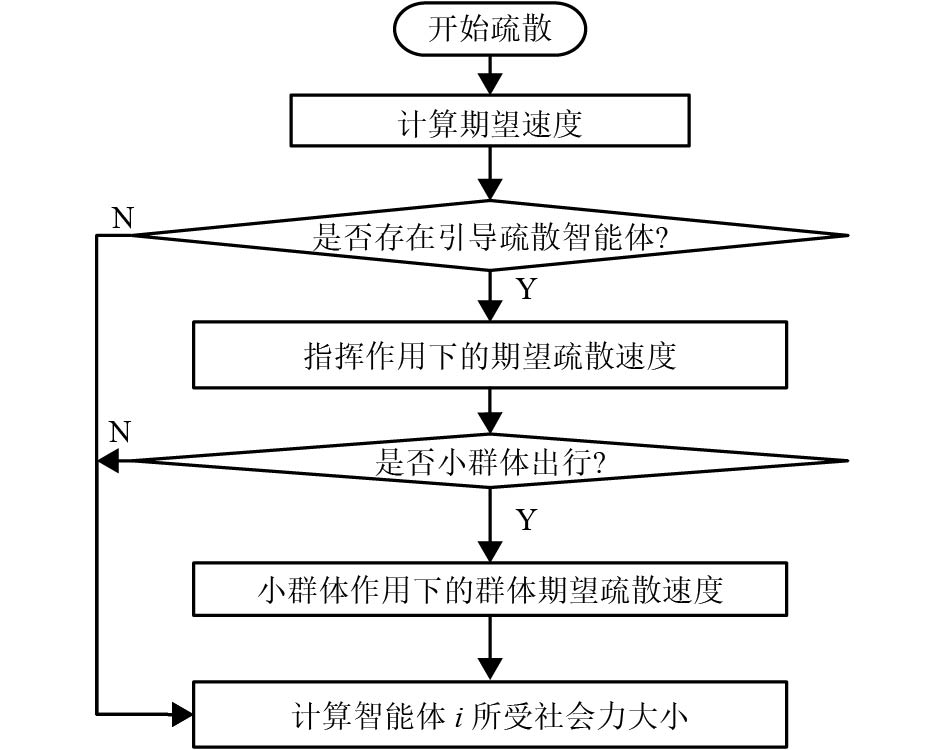
图 5 智能体在客流引导作用下的行为模型的流程
Figure 5. Agent action model under the influence of passenger flow guidance
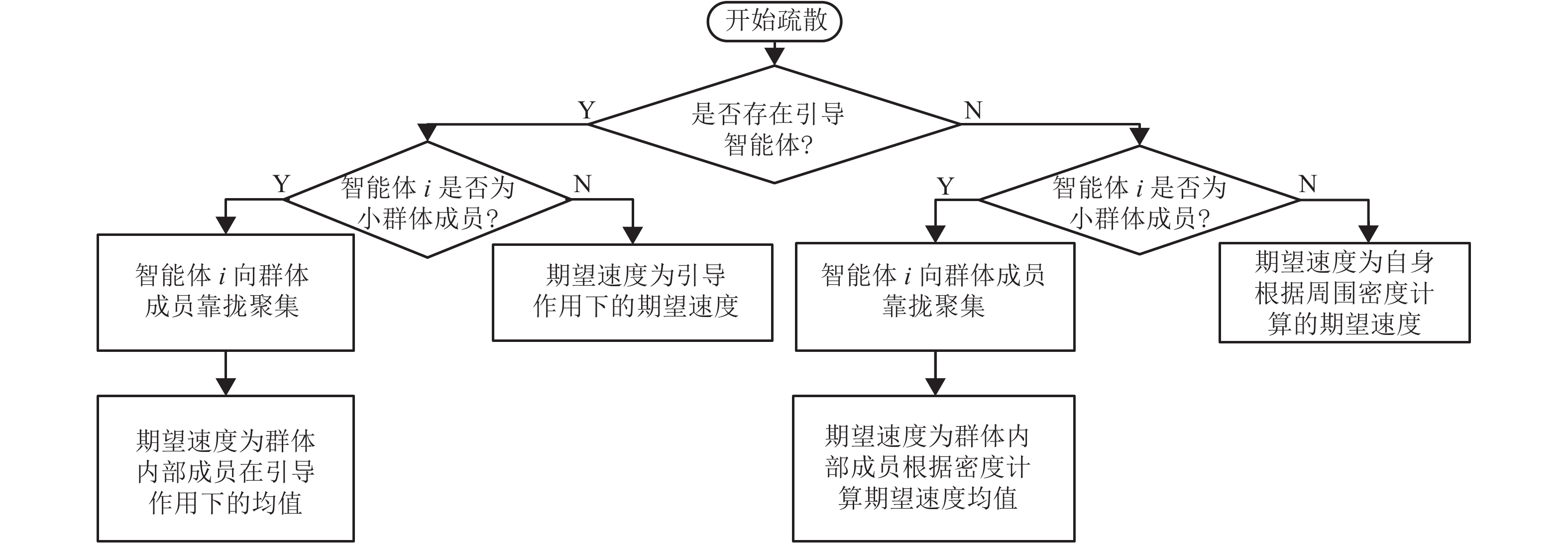
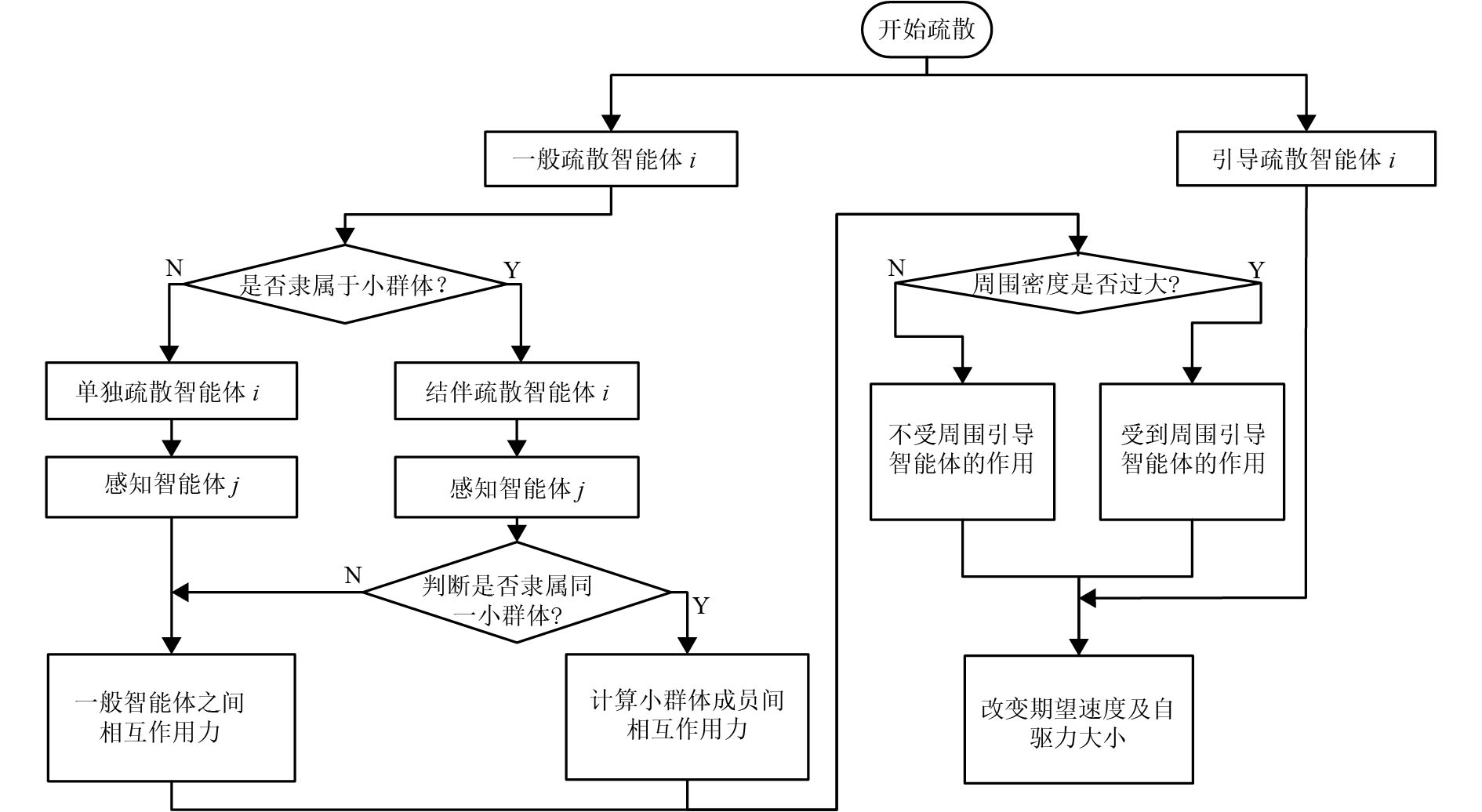
图 6 智能体在客流引导下及考虑小群体时的行为模型
Figure 6. Agent action model considering passenger flow guidance and small group behaviour

图 7 西直门2号线站台简化布局
Figure 7. Simplified layout of Xizhimen station platform along Metro Line 2
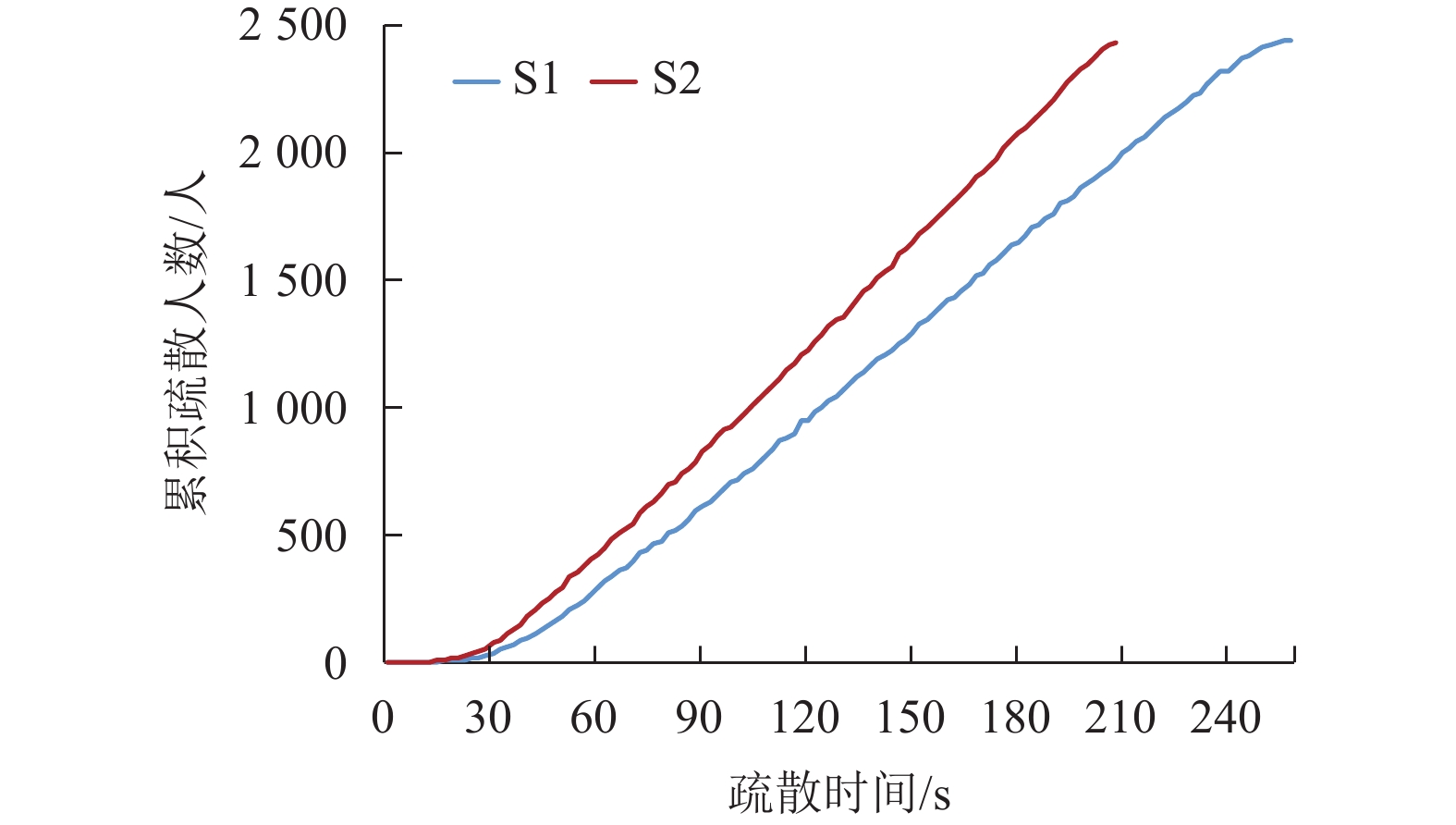
图 8 累积疏散人数随时间的变化
Figure 8. Number of the cumulative evacuated people varying with time
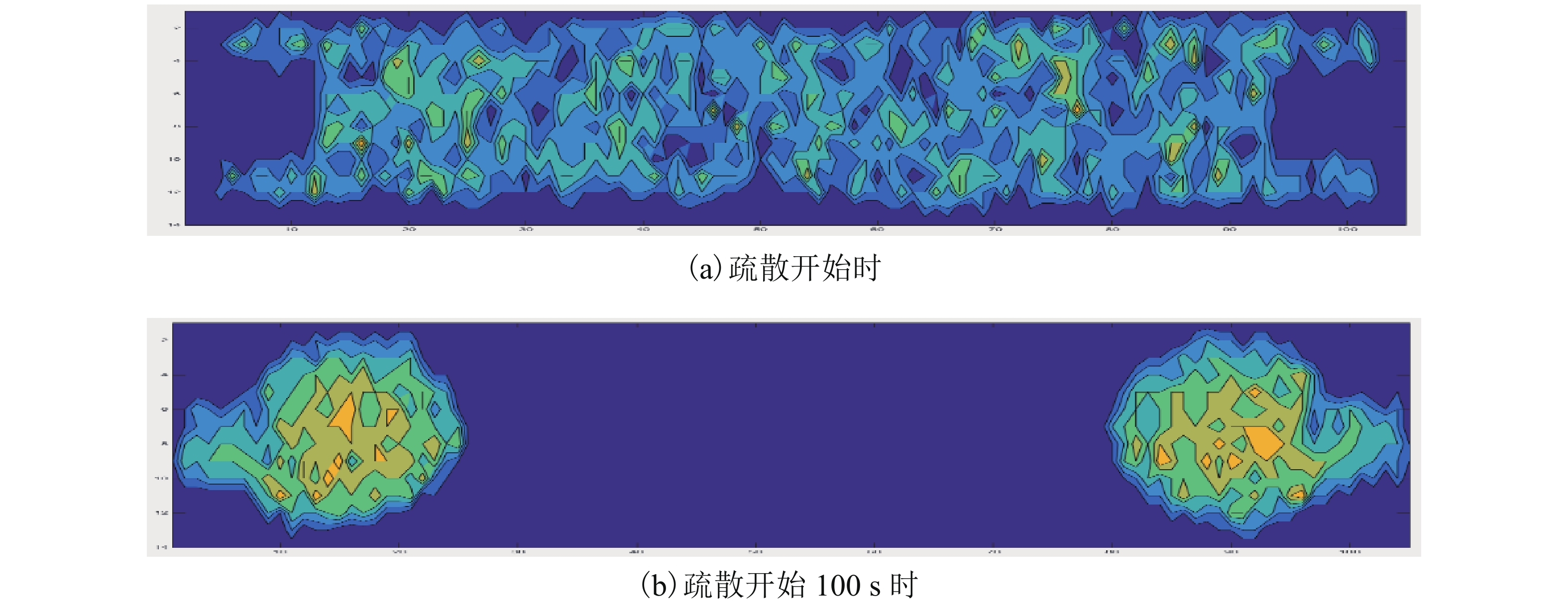
图 10 疏散仿真开始及过程中客流分布热力图
Figure 10. Heat mapping of passenger distribution when the evacuation simulation starts and runs

图 11 衔接区域平均密度随疏散时间变化情况
Figure 11. Density variation with evacuation time in the connecting region
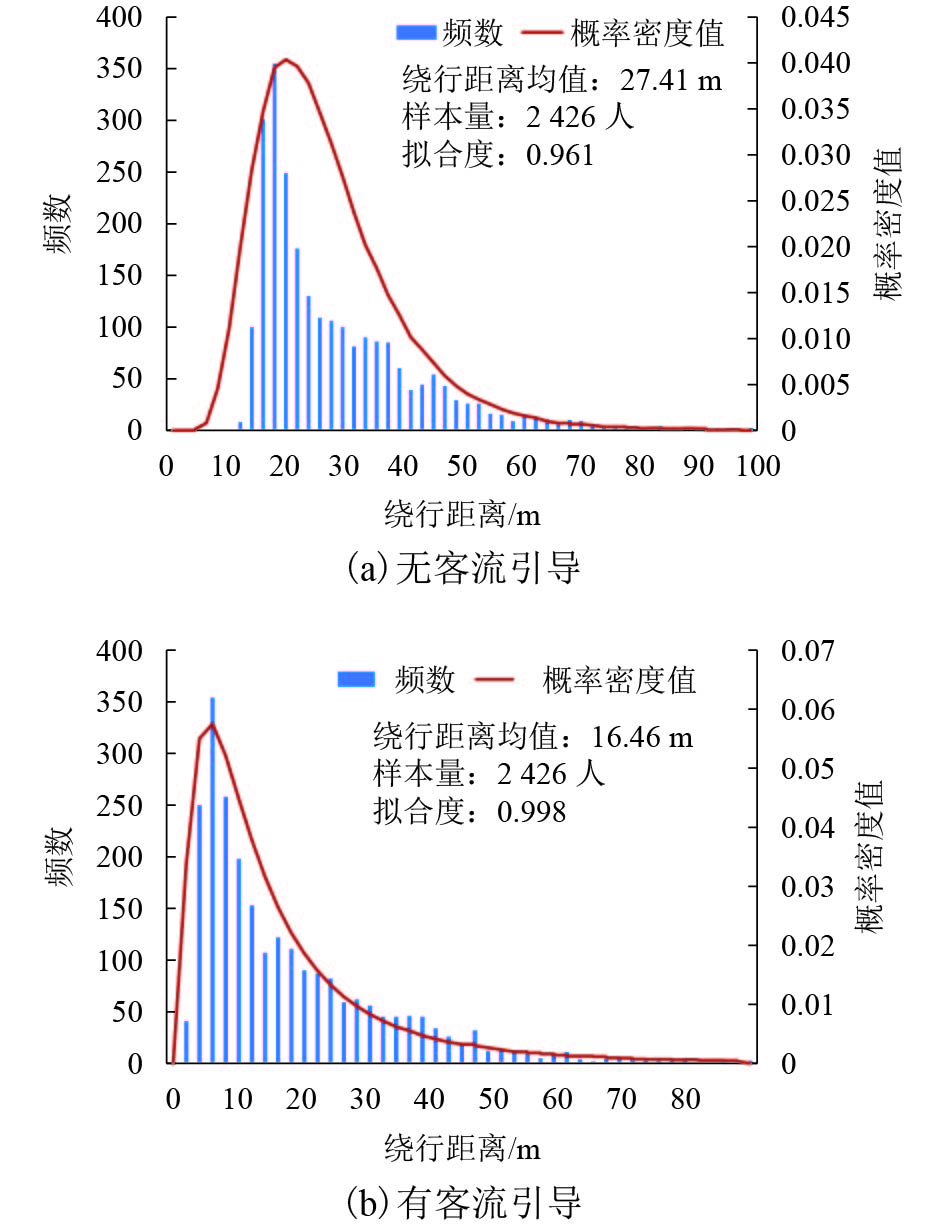
图 12 疏散场景有(无)客流引导作用的绕行距离分布
Figure 12. Distribution of detour distance with and without guidance
表 1 疏散仿真场景设置
Table 1. Simulation scenarios for evacuation
场景编号 疏散人数/人 客流引导 小群体 S1 2 426 无 无 S2 2 426 有 无 S3 2 426 无 有 S4 2 426 有 有  下载: 导出CSV
下载: 导出CSV
表 2 各场景疏散效率及平均疏散时间
Table 2. Distribution of detour distance with and without guidance
分组 场景编号 客流引导 小群体 总数疏散时间/s 总体疏散效率/% 平均疏散时间/s 小群体较单人疏散增加幅度/% 单人 小群体 1 S1 无 无 259.53 –17.00 138.46 S3 无 有 303.66 129.37 213.68 65.17 2 S2 有 无 207.33 –14.19 117.79 S4 有 有 236.75 118.90 154.78 30.18
下载: 导出CSV
表 3 各场景平均绕行距离
Table 3. Average detour distance in different scenarios
分组 场景编号 客流引导 小群体 平均绕行距离/m 增加绕行距离/m 增加幅度/% 1 S1 无 无 27.41 S3 无 有 32.18 4.77 17.40 2 S2 有 无 16.46 S4 有 有 25.66 9.2 55.89
下载: 导出CSV
-
HELBING D, BUZNA L, JOHANSSON A, et al. Self-organized pedestrian crowd dynamics: experiments,simulations,and design solutions[J]. Transportation Science, 2005, 39(1): 1-24. doi: 10.1287/trsc.1040.0108 YANG Bo, WANG Cheng, HUANG Hua, et al. A multi-agent and PSO based simulation for human behavior in emergency evacuation[C]//International Conference on Computational Intelligence and Security, Harbin: IEEE Computer SOC, 2007: 296-300 JOHANSSON A, HELBING D, SHUKLA P K, et al. Specification of a microscopic pedestrian model by evolutionary adjustment to video tracking data[J]. Advances in Complex Systems, 2007, 10(S2): 271-288. JEON G Y, KIM J Y, HONG W H, et al. Evacuation performance of individuals in different visibility conditions[J]. Building and Environment, 2011, 46: 1094-1103. doi: 10.1016/j.buildenv.2010.11.010 FRUIN J J. Pedestrian planning and design[J]. Metropolitan Association of Urban Designers & Environmental Planners, 1971, 77(4): 556-561. HELBING D, JOHANSSON A, MATHIESEN J, et al. Analytical approach to continuous and intermittent bottleneck flows[J]. Physical Review Letters, 2006, 97(16): 1-4. 陈绍宽,李思悦,洪倩,等. 地铁车站内乘客疏散时间计算方法研究[J]. 交通运输系统工程与信息,2008,8(4): 101-107. doi: 10.3969/j.issn.1009-6744.2008.04.015CHEN Shaokuan, LI Siyue, HONG Qian, et al. Modeling evacuation time for passengers from metro platforms[J]. Journal of Transportation Systems Engineering and Information Technology, 2008, 8(4): 101-107. doi: 10.3969/j.issn.1009-6744.2008.04.015 李逊,洪玲,徐瑞华. 轨道交通车站应急疏散乘客心理行为影响因素分析[J]. 城市轨道交通研究,2012,15(4): 54-57. doi: 10.3969/j.issn.1007-869X.2012.04.014LI Xun, HONG Ling, XU Ruihua. Influential factors of passengers' psychology and behavior on subway station emergency evacuation[J]. Urban Mass Transit, 2012, 15(4): 54-57. doi: 10.3969/j.issn.1007-869X.2012.04.014 刘雯丽. 城市轨道交通车站客流紧急疏散仿真研究[D]. 成都: 西南交通大学, 2013 邢云磊. 大型客运站应急疏散客流组织动态仿真方法的研究[D]. 北京: 北京交通大学, 2010 陈绍宽,刘爽,肖雄,等. 基于M/G/c/c模型的地铁车站楼梯通道疏散能力瓶颈分析研究[J]. 铁道学报,2013,34(1): 7-12.CHEN Shaokuan, LIU Shuang, XIAO Xiong, et al. M/G/c/c-based model of passenger evacuation capacity of stairs and corridors in metro stations[J]. Journal of the China Railway Society, 2013, 34(1): 7-12. PREDTECHENSKII V M, MILINSKII A I. Planning for foot traffic flow in buildings[M]. New Delhi: Amerind Publishing Co. Pvt. Ltd., 1978: 1-240 代伟. 群集应急疏散影响因素及时间模型研究[D]. 长沙: 中南大学, 2012 -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 835
- HTML全文浏览量: 356
- PDF下载量: 21
- 被引次数: 0