

Dynamic Simulation of Load Process for Urban Rail Power Supply System Driven by Operation Diagram
-
摘要:
针对城轨供电系统采用平铺运行图进行负荷过程仿真分析与实际负荷过程差别大,不能准确反应供电系统运营阶段的诸多问题,将运行图中各列车运行时分作为约束条件,建立列车定时节能运行的指标函数,以提高仿真模型准确性;基于固定阶梯级目标速度搜索算法优化列车操纵序列,还原多列车具有电气信息的运行轨迹;以实迹运行图为驱动,实现了供电系统正常运行与异常情形下的负荷过程仿真分析. 算例分析结果表明:基于实迹运行图的仿真结果与实测牵引变电所负荷过程曲线的Pearson相关系数在0.89以上,负荷过程特征值仿真与实测的最大误差不超过6.85%,较平铺运行图仿真结果准确度最高可提升12.91%.
Abstract:Load process simulation analysis based on the paving operation diagram for urban rail power supply system is significantly different from the actual load process, which cannot accurately reveal many issues in the operation stage of the power supply system. To improve the accuracy of the simulation model, with the train running time in operation diagram as constraints, the objective function with respect to the scheduled energy-saving train operation is established. The target velocity search algorithm with a fixed step is used to optimize the train control sequence and restore the electrical information of the operation diagram with multiple trains. Driven by the actual operation diagram, the load process simulation analysis of the power supply system is performed under normal and abnormal operations. The case study shows that the Pearson correlation coefficient between the simulation results from the actual-track operation diagram and the measured load process curve from traction substations is above 0.89, and the maximum error between the simulated and measured characteristic values in load process is not more than 6.85%, which can improve the accuracy of the simulation results by 12.91% in comparison to the tiled operation diagram.
-
环境污染和能源短缺问题成为近些年来的热点问题,分布式电源(DG)应运而生,并且得到了广泛研究和应用. 目前,微电网系统作为一种较为灵活的能源利用形式,由DG、储能单元、电力负载及控制器等几部分组成,为用户端供能,较大程度地发挥DG的能效,规模较小,与大电网的兼容交互性强,更适合并入大电网中[1-3]. 微网在离网运行时,由内部DG实现母线的功率平衡;并网运行时,大电网和微电网进行能量交换,由于传统大电网往往是交流形式,微电网并网时通常需要通过并网逆变器进行变换[4]. 在多微电网并联运行系统中,采用对等控制模式时,通过本地控制各并网逆变器为负载供能,且各逆变器独立运行[5-6].
对于线路阻抗差异对系统产生的影响,很多学者通过改进逆变器控制方法对该问题进行了研究与改进:文献[7]考虑到微电网中线阻差异对蓄电池荷电状态的影响,提出一种基于虚拟额定电流的策略,使荷电状态快速均衡;文献[8]分析了系统的稳定性,提出一种串联虚拟阻抗的方法,改善附加虚拟惯性系数降低系统阻尼的情况. 对于系统中的功率均衡问题,很多学者也考虑了不同方面,以更加合理地分配功率:文献[9]引入变化系数的改进互联通信荷电状态下垂控制,限制各储能模块的最大输出功率,实现功率合理分配;文献[10]和文献[11]在下垂控制中分别用增加无功功率反馈和改进传统虚拟阻抗的方法来改善功率分配的准确度;文献[12]基于虚拟感抗改变等效线路阻抗为感性,并自适应调节无功功率,实现功率均衡分配的目的. 上述有些方法虽然能实现合理分配功率,但在电压的降落大小、达到稳定的速度和不能适用于变化参数的系统等方面仍有改进空间.
本文搭建含有光伏、蓄电池、燃料电池、电解槽的多微电网系统,针对低压微电网系统中,逆变器输出有功功率分配受线路阻抗差异影响的问题进行分析,并在RT-LAB半实物平台上验证本文所提的基于功率跟随控制的反下垂控制方法,并与传统下垂控制方法等进行对比,验证本文所提方法的可行性及在改善功率分配合理度、降低电压偏差和减小环流大小方面的有效性.
1. 系统结构
1.1 多微电网并联运行结构
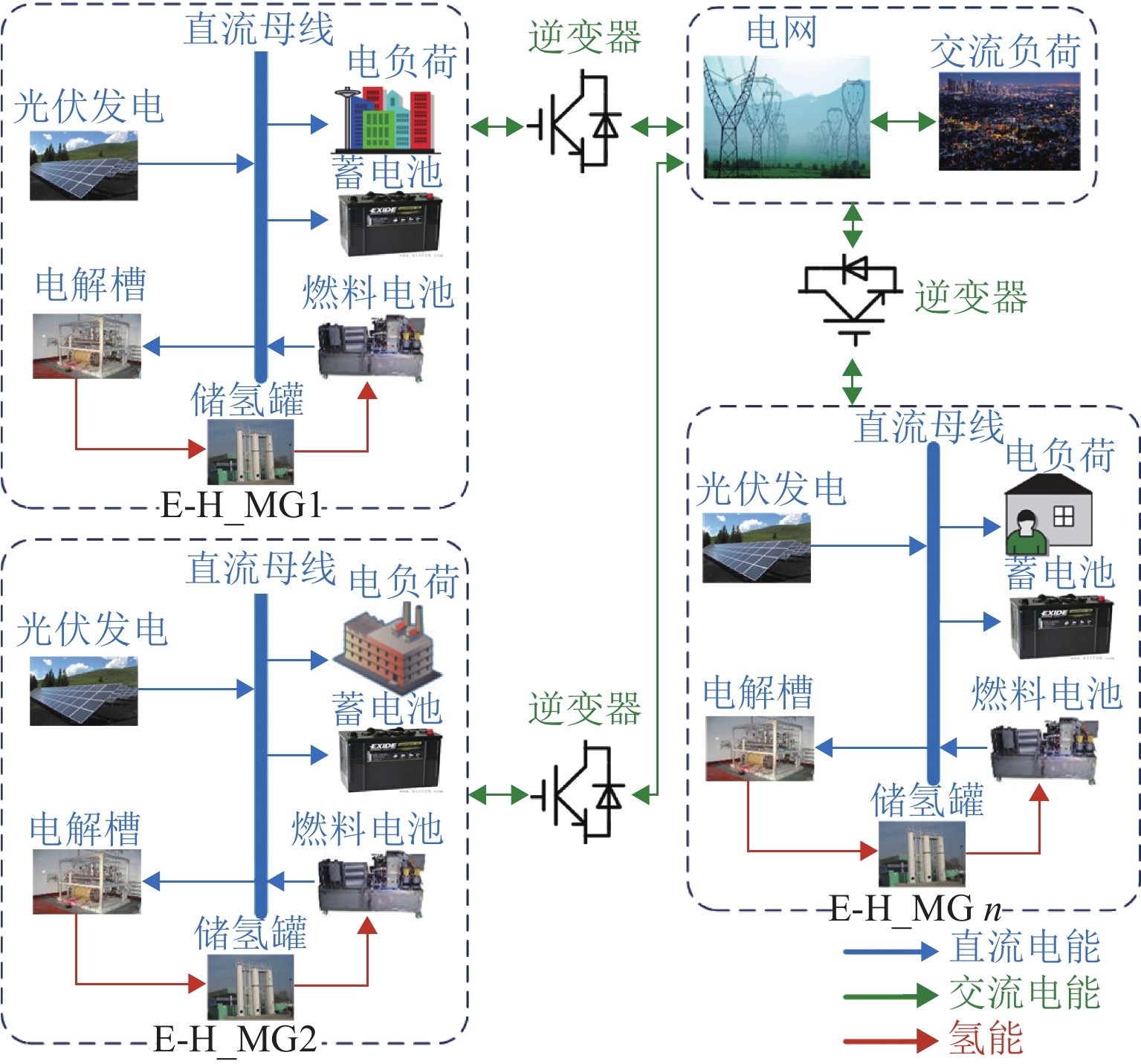
一个微电网是由DG、储能装置、电力负载等共同组成的系统,以电-氢储能直流微电网为例,光伏阵列作为DG,对蓄电池、燃料电池、储氢罐、电解槽及负载供能,多直流微电网并联运行示意如图1所示.
1.2 模型搭建
本文所搭建的直流微电网系统中,光伏电池所用的数学模型[13]为
I=Isc{1−C1[exp(UC2Uoc)−1]}, (1) 式中:I和Isc分别为光伏电池的输出电流和短路电流,U和Uoc分别为光伏电池的输出电压和开路电压,C1、C2分别为与峰值电压、电流的相关函数.
蓄电池的数学模型可由可变电压源和内部电阻[14]表示为
Ubat=E−Rbatibat = E0−kf(ibat,t)in−kQbQb−Qaibatt+Aexp(−Bibatt)−Rbatibat, (2) 式中:Ubat为蓄电池端电压,E为蓄电池开路电压,Rbat为蓄电池内阻,ibat为蓄电池电流,E0为蓄电池电压常数,k为极化常数,in为蓄电池滤波电流,Qa为蓄电池释放的容量,Qb为蓄电池额定容量,A为蓄电池指数电压,B为指数容量,t为时间.
质子交换膜燃料电池的输出电压[15]为
Ucell=EN−Uact−Uom−Ucon, (3) 式中:EN为热力学电动势,Uact为活化过电压,Uom为欧姆过电压,Ucon为浓差过电压.
电解槽电解水为氢气和氧气,制氢速度[16]为
Vel=ηFnciel/(2F), (4) 式中:ηF为法拉第效率,nc为电解槽串联个数,iel为电解槽输出电流,F为法拉第常数.
储氢罐的储氢量[13]为
Wel=∫t2t1Veldt, (5) 式中:t1、t2分别为储氢罐存储氢气的开始时间和结束时间.
2. 多微电网并联运行功率分配机制
2.1 直流微电网各DG功率分配
如图1所示,各直流微电网与交流负荷之间通过逆变器对电能进行转换,而直流微电网运行时,为保证系统的正常运行,直流母线处也应保持功率平衡. 为提高光伏的利用率,光伏发电系统始终由最大功率点跟踪控制(MPPT)进行控制. 通过系统管理层控制[6]计算得出功率参考值,与实时输出功率相比得到占空比,并通过PI (proportional integral)控制得到电、氢储能系统的占空比,改变占空比来调节各DG换流器的出力. 光伏系统输出不能满足负载需求时,由储能系统补足负载缺额;在光伏系统对负载的供应有富余时,储能系统将富余电能转化为化学能和氢能进行储备.
2.2 功率分配机制
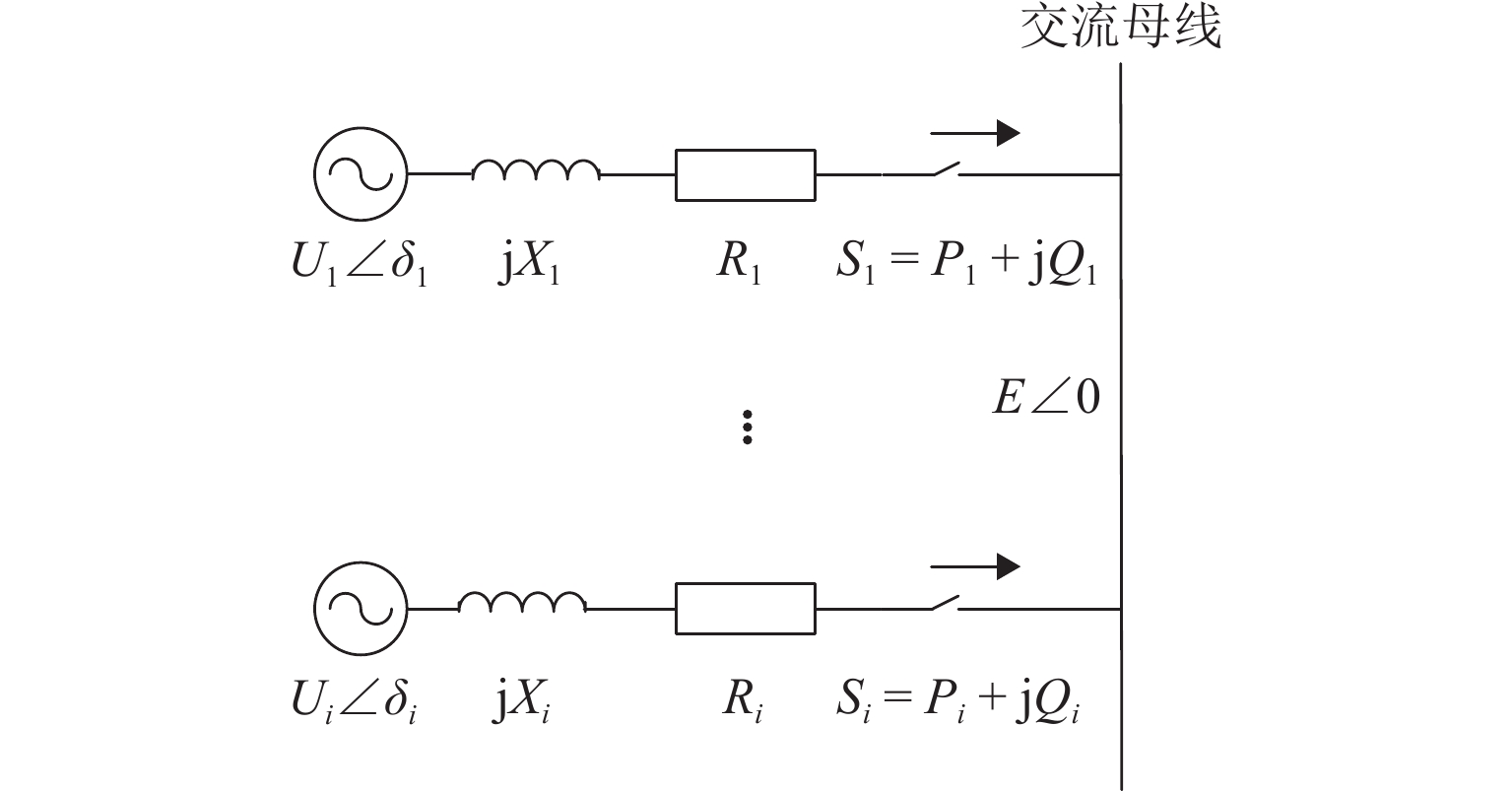
为方便分析,多微电网的并联运行可以简化为如图2所示的等效电路形式. E∠0为母线电压;Ui为第i个逆变器目标电压的相电压幅值,δi为第i个逆变器的电压相角, Zi=Ri + jXi为系统阻抗,Ri为逆变器电阻,i=1,2. 从逆变器注入母线的功率Si=Pi + jQi,则有
{Pi=(EUiZicosδi−E2Zi)cosθi+EUiZisinδisinθi,Qi=(EUiZicosδi−E2Zi)sinθi−EUiZisinδicosθi, (6) 式中:Pi和Qi为两逆变器注入母线的有功、无功功率,θi为阻抗角.
由于δi很小,再令sin δi≈δi,cos δi≈1,且低压微电网中线路阻抗的电阻远大于电抗,使得系统阻抗整体呈阻性,令Zi≈Ri,δi≈0. 则式(6)可简化为
{Pi≈E(Ui−E)Ri,Qi≈−EUiRiδi. (7) 由式(7)可知:Pi取决于电压降Ui−E, Qi取决于电压相角δi,且角速度ω、电压相角δi和系统频率f关系如式(8).
f=ω2π =dδidt. (8) 由式(8)可知,Qi的大小与f密切相关,可以通过调节f来调节Qi. 因此,在低压系统中,逆变器所采用的传统下垂控制策略为P-U、Q-f反下垂控制,方程为
{ωi=ωn_i+ni(Qn_i−Qi),Ui = Un_i−mi(Pn_i−Pi), (9) 式中: Un_i为额定相电压幅值,ωi为目标角速度,ωn_i为额定角速度,mi为电压调节下垂系数,ni为频率调节下垂系数,Pn_i、Qn_i分别为逆变器额定有功、无功功率.
多微电网并联运行的系统中,由于逆变器的额定容量和所供应的负荷功率按比例匹配是很难实现的,下面对两微网并联运行系统进行简化分析,功率分配情况如式(10)所示.
{ΔP=P1−cP2=E(U1−ER1−cU2−ER2),ΔQ=Q1−cQ2=−E(U1R1δ1−cU2R2δ2), (10) 式中:ΔP、ΔQ分别为两台逆变器的有功、无功功率环流,c为逆变器的额定容量比例.
联立式(9)、(10)可知,当系统处于下垂控制的稳态运行状态时,若想按容量比例合理分配功率,即ΔP=ΔQ=0,需满足式(11)条件.
m1m2=n1n2=R1R2=1c. (11) 由于系统频率是全局变量,使得线路阻抗的差异对无功功率的分配影响较小. 显然,由于各逆变器的输出电压幅值是局部变量,在线路阻抗不能满足合理分配的条件时,传统反下垂控制下合理分配有功功率是很难实现的.
3. 基于功率跟随控制的反下垂控制
3.1 考虑电压偏差的反下垂控制
在系统运行中,输出线路阻抗显然很难满足式(11)所示条件,因此,对P-U下垂控制器进行分析,电压偏差与有功功率关系为
{δUi=mi(Pn_i−Pi)Udi=d(δU)dt=mid(Pn_i−Pi)dt, (12) 式中:δUi为额定电压与输出电压的偏差,Udi为电压偏差δUi的变化率.
由式(12)可知:Pi的大小与δUi有直接关系,若输出电压与额定电压存在偏差,Pi也与Pn_i存在偏差;而有功功率的稳定与δUi的变化率Udi有直接关系,电压若持续变化,有功功率将无法稳定. 根据上述关系,构造反下垂控制器为
{Ui=Un_i−δUi,Udi=Udn_i−mi(Pn_i−Pi), (13) 式中:Udn_i为额定电压偏差变化率,取值为0.
由式(13)可知:在考虑电压偏差的反下垂控制(RDVD)运行过程中,电压偏差变化率为0时,即电压稳定时,有功功率就会稳定.
将式(13)中的Udn_i取值为0,同样以两逆变器并联运行为例,则有
{Ud1=−m1Pn\_1+m1P1,Ud2=−m2Pn\_2+m2P2. (14) 结合式(13)和式(14),得到两逆变器的输出电压为
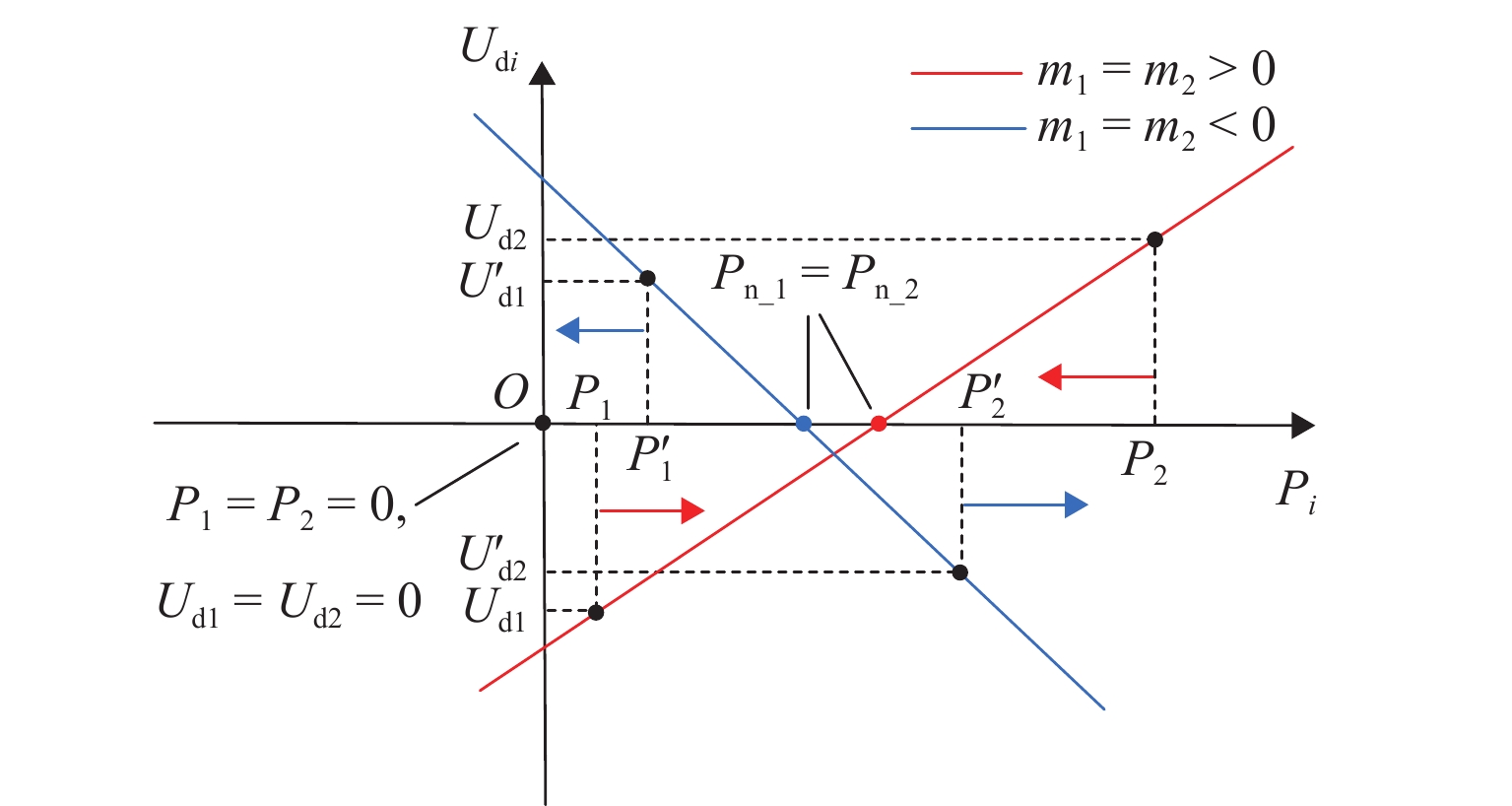
{U1=Un\_1−∫Ud1dt,U2=Un\_2−∫Ud2dt. (15) 假设Pn_1=Pn_2,令m1=m2>0和m1=m2<0,在反下垂控制下,可以得到系统在2种情况下运行时两逆变器有功功率的趋势. 由于在一种情况下两逆变器的趋势相同,两种情况下的逆变器运行趋势将分别重合为2条曲线,如图3所示. 图中,变量加一撇为各变量变化后的值.
又由于两逆变器带公共负荷,则有功功率有如下关系:
P1+P2=Psum, (16) 式中:Psum为系统的公共负荷.
由式(16)可知,负荷固定的情况下,若P1<P2,则必为P1<Pn_1<P2. 从图3中的红色曲线可以看出,所对应的Udi关系为Ud1<0<Ud2. 联合式(15)可知,输出电压U1会增大,输出电压U2则减小;有功功率会随电压而变化,P1会相应增大,P2会随之减小,最终实现P1=P2=Pn_1=Pn_2,功率分配在参考值下.
同理,从图3中的蓝色曲线可以看出:所对应的Udi关系为Ud1>0>Ud2,即输出电压U1会减小,输出电压U2则增大;P1会相应减小,P2会随之增大,最终系统失稳. 从图3中也可以看出,下垂控制系数的选择对系统运行也是至关重要的.
3.2 功率跟随控制
由3.1可知,若Pn_i是一个固定值,系统投切负荷时,Pi随系统变化,而Pn_i不随之变化,有功功率将一直存在偏差,进而反馈到电压上,电压会持续降低或增加,而电压的变化也会再影响到有功功率,有功功率会持续降低或增加,最后系统失稳. 且系统负荷变化时,所期望的母线电压幅值是不变的,由式(13)可知,电压幅值的稳定可以带动有功功率的稳定,最终系统稳定.
因此,用电压差反馈来自动调节Pn_i,如式(17).
Pn_i=δUn_i−δUi, (17) 式中:δUn_i为额定电压偏差,取值为0.
显然,该控制器下的控制效果远远不够,为电压偏差δUi引入PID (proportional integral derivative)控制器,构造后的功率跟随控制框图如图4所示. 图中:Kp为比例系数,Td为微分系数,Ti为积分系数,s为复频域变量.
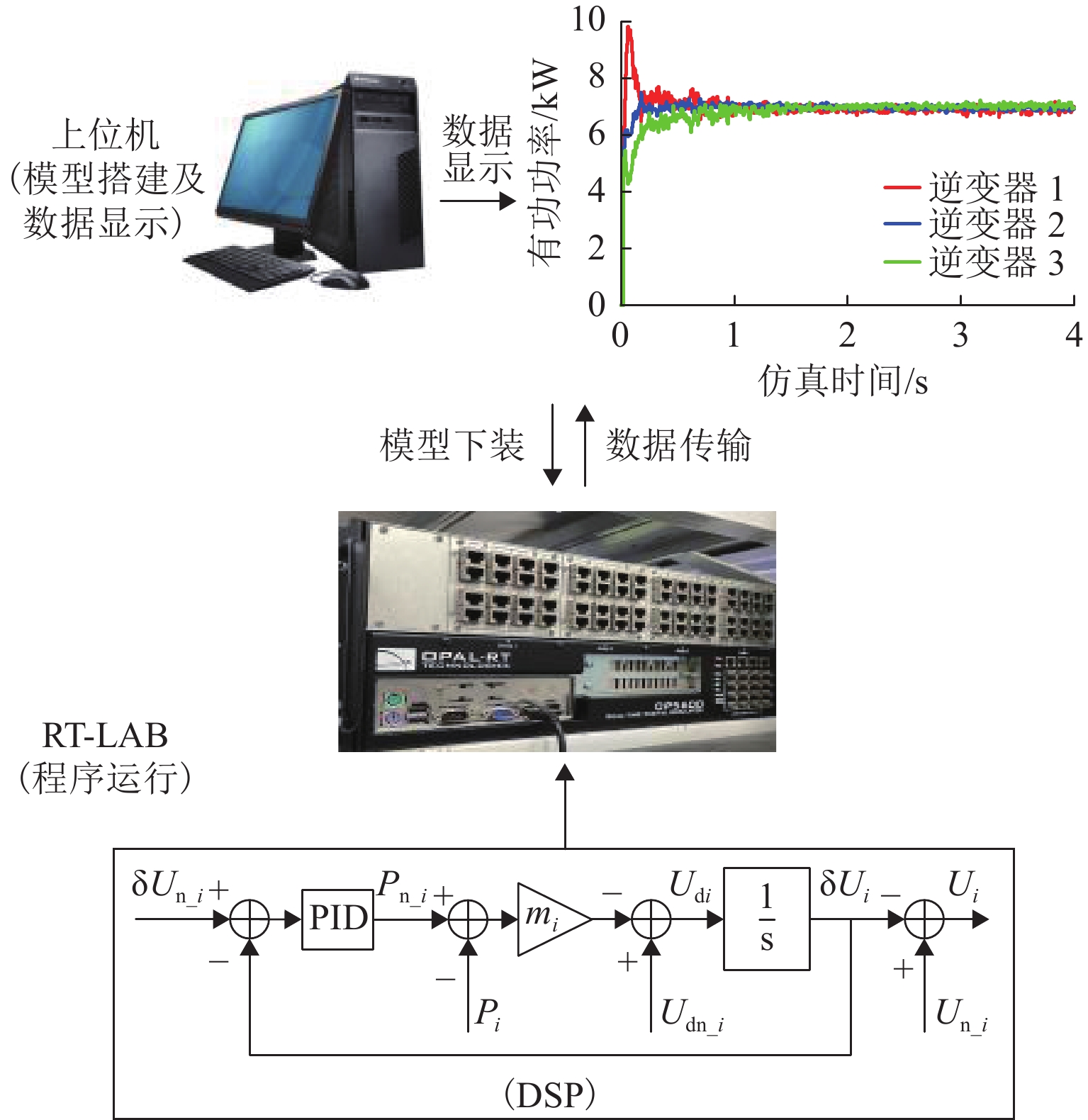
通过RDVD控制对功率跟随控制中PID控制器的输出量进行控制,构造出基于功率跟随控制的反下垂控制方法,控制框图如图5所示.
 图 5 基于功率跟随控制的反下垂控制框图Figure 5. Block diagram of reverse droop control based on power following control
图 5 基于功率跟随控制的反下垂控制框图Figure 5. Block diagram of reverse droop control based on power following control对于式(17)所示控制器来说,图4中的被控对象对应为图5中的Pi,电压偏差反馈所得为被控对象的参考值,最终控制目标为Pi与Ui达到共同稳定,且Ui与Un_i偏差小,功率分配合理. 如图5所示,令电压偏差率Udi取值为0,且mi取值为负,当负荷增大时,输出功率Pi增大,则Pn_i-Pi和Udi将减小,即δUn_i-δUi随之增大,Pn_i增大,最终使输出电压和功率趋于共同稳定.
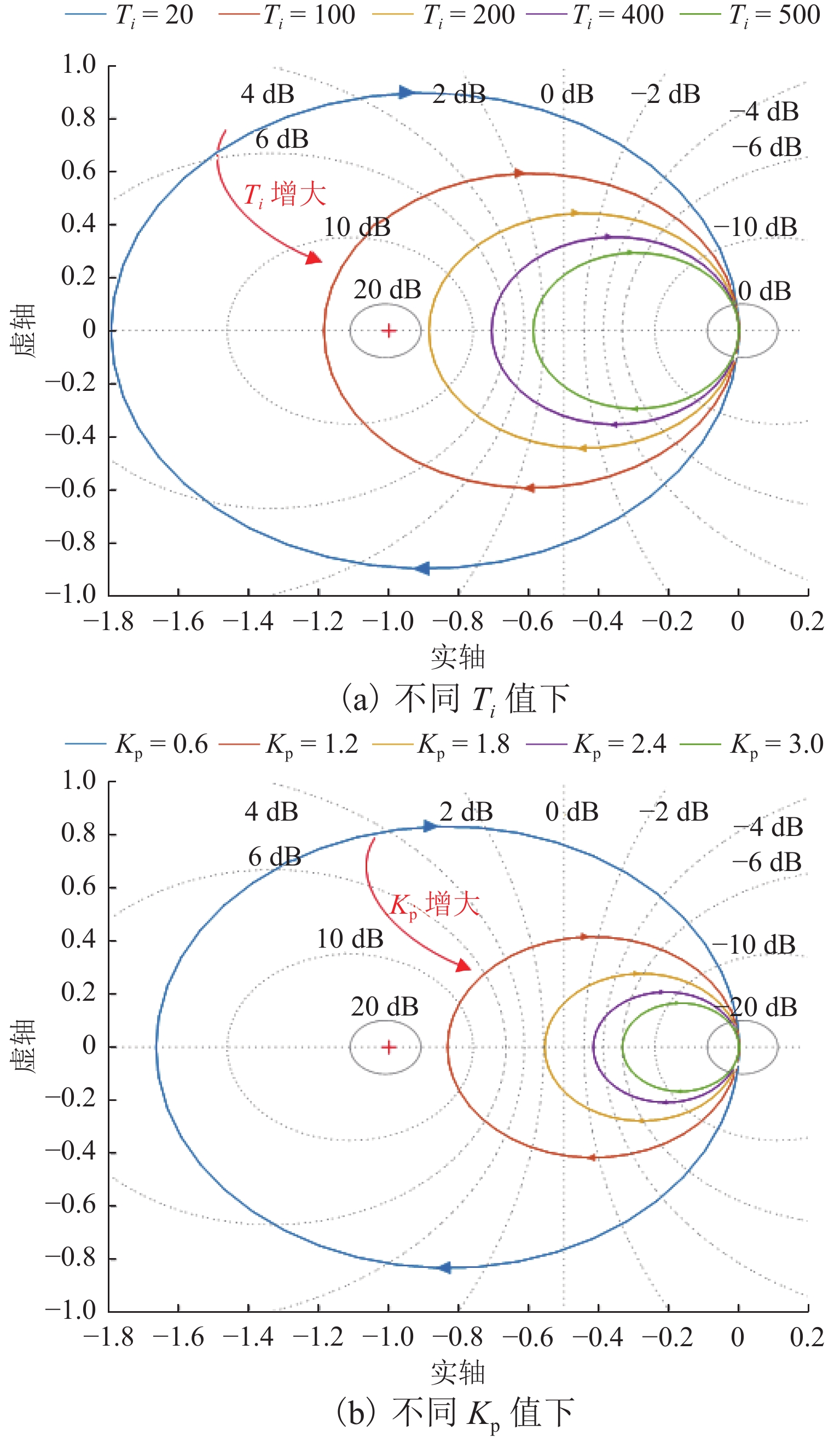
由3.1分析可知:mi的取值会影响到系统的稳定性;由于PID控制器自身3个参数对被控对象的调节作用各不相同,该部分取值同样对系统响应速度、电压质量和系统稳定性有很大影响. 由图5可推出基于功率跟随控制的反下垂控制器所对应的闭环传递函数,进而可绘制出奈奎斯特曲线来反映控制系数取值对系统稳定性的影响. 如图6(a)所示:当Ti=20时,根据奈奎斯特稳定判据可知,此时系统不稳定;当Ti=200及更大时,系统能稳定运行. 如图6(b)所示:Kp=0.6时,根据奈奎斯特稳定判据可知,此时系统不稳定;Kp=1.2及更大时,系统能稳定运行.
 图 6 基于功率跟随控制的反下垂控制频谱响应特性Figure 6. Spectrum response characteristics of reverse droop control based on power following control
图 6 基于功率跟随控制的反下垂控制频谱响应特性Figure 6. Spectrum response characteristics of reverse droop control based on power following control4. 实验验证
4.1 实验平台及参数设置
为验证本文所提方法的可行性,使用RT-LAB半实物仿真平台,通过系统的实时仿真运行来进行测试. 搭建的实验平台系统如图7所示,该仿真平台的型号为OP5600,并使用DSP TMS28335控制器对模型进行控制.
本文实验以3个电-氢储能直流微电网并联运行在低压微电网系统下为例. 各逆变器对无功功率始终采用传统Q-f反下垂控制,对有功功率采用传统反下垂控制、基于电压恢复机制的反下垂控制[11]、RDVD反下垂控制和本文所提控制方法分别进行实验验证,并将实验结果(输出有功功率、输出电压和逆变器1、2间的A相环流)进行对比分析,微电网系统参数和元件参数设置如表1、2所示.
表 1 系统参数Table 1. System parameters参数 取值 逆变器 1 线路阻抗 Zline_1/Ω 0.642 + j0.083 逆变器 2 线路阻抗 Zline_2/Ω 0.963 + j0.124 5 逆变器 3 线路阻抗 Zline_3/Ω 1.284 + j0.166 滤波电感/MH 5 滤波电容/MF 0.5 额定电压/V 220 额定无功功率/kvar 5 逆变器容量比例 1∶1∶1 表 2 元件参数Table 2. Component parameters元件 参数 数值 光伏阵列 环境温度/℃ 25 燃料电池 额定功率/W 2000 额定电压/V 24 电解槽 额定功率/W 2000 储氢罐 最大容许压强/MPa 35 体积/L 1 初始容量/% 50 蓄电池 最大充放电功率/W 4000 容量/(A·h) 40 额定电压/V 500 初始荷电状态/% 50 4.2 方法验证
4.2.1 传统反下垂控制
令Psum=20.00 kW,Pn_i=5.00 kW,用传统反下垂控制方法对各逆变器控制.
如图8(a)所示,各逆变器输出有功功率相差较大,功率分配精度较低. 如图8(b)所示,母线电压很快稳定在310 V下,与额定母线电压幅值310.27 V相差较小. 如图8(c)所示,逆变器1、2间的A相环流大小基本在[−5.0,5.0] A波动.
4.2.2 基于电压恢复机制的反下垂控制
令Psum=20 kW不变,用基于电压恢复机制的反下垂控制方法[11]对各逆变器进行控制.
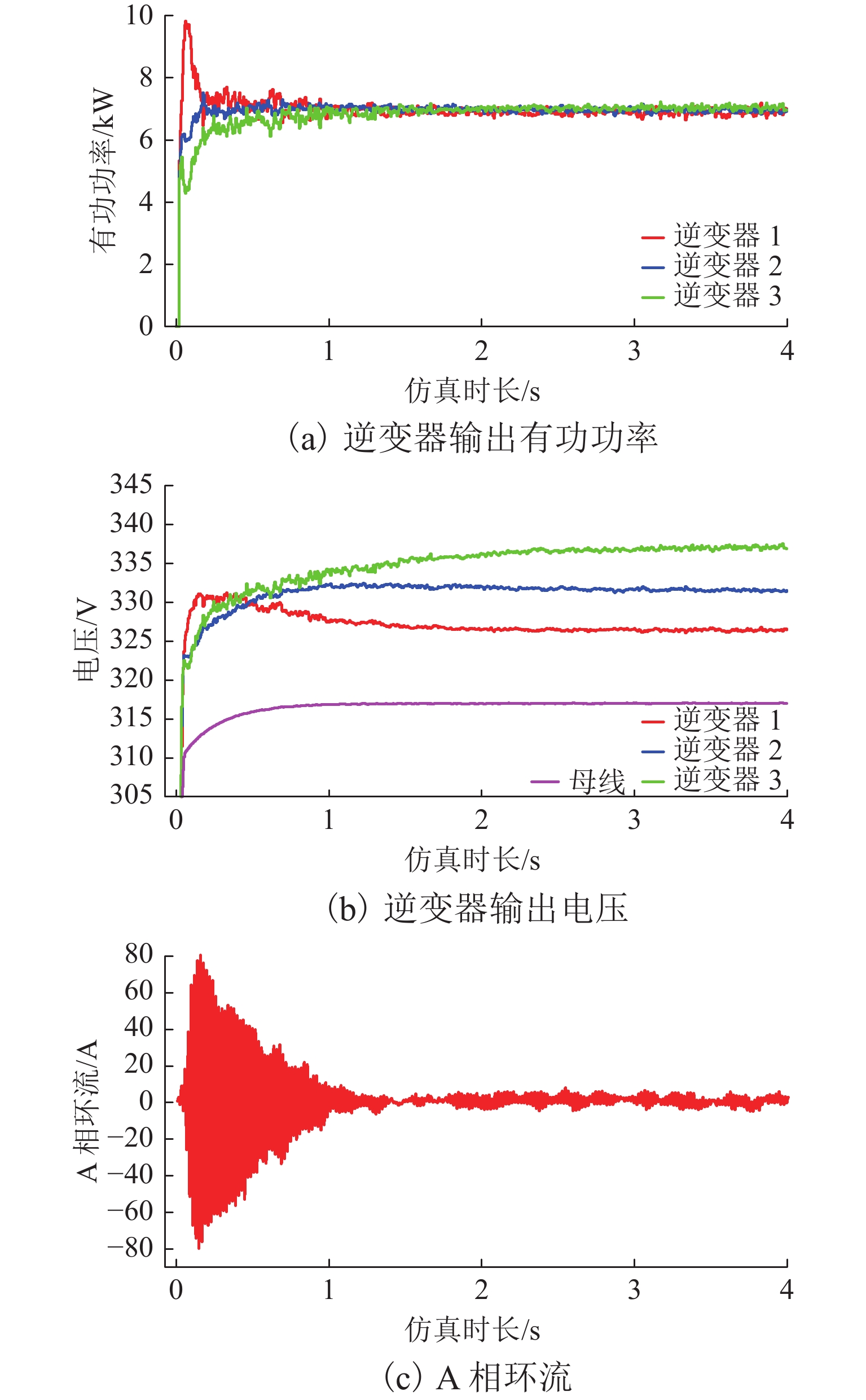
如图9(a)所示,逆变器输出有功功率响应速度慢,并在1.50 s后基本稳定在7.00 kW,功率分配精度较高,但略高于额定值. 如图9(b)所示,母线电压在1.00 s后稳定在317.00 V下,与额定母线电压幅值310.27 V相差较大. 如图9(c)所示,启动时逆变器1、2间的A相环流峰值达到81.5 A,随后逐渐减小,1.50 s后,环流大小基本在[−8.0,8.0] A波动.
 图 9 基于电压恢复机制的反下垂控制方法实验结果Figure 9. Experimental results of reverse droop control based on voltage recovery mechanism
图 9 基于电压恢复机制的反下垂控制方法实验结果Figure 9. Experimental results of reverse droop control based on voltage recovery mechanism4.2.3 RDVD控制
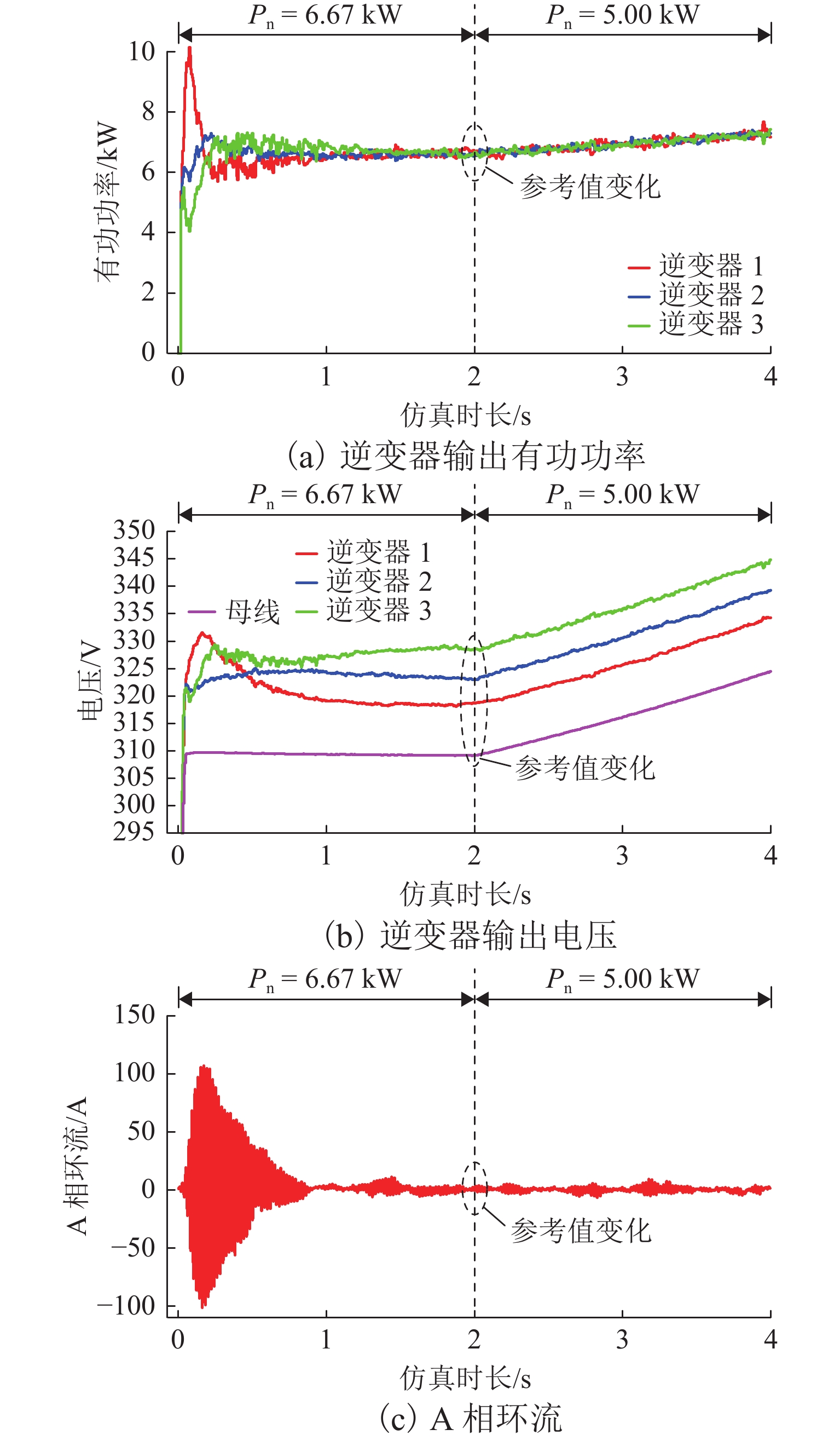
令Psum=20.00 kW不变,启动时设定额定Pn_i=6.67 kW,2.00 s时设定Pn_i=5.00 kW,用RDVD控制方法对各逆变器进行控制.
如图10(a)所示:各逆变器输出有功功率响应速度慢,并在1.00 s后基本稳定在6.67 kW,功率分配精度较高;但在参考值变化后,各逆变器输出功率均提高,并在4.00 s时达到7.30 kW,高于系统均分功率. 如图10(b)所示,母线电压在1.00 s后稳定在309.20 V下,并于参考值变化后急剧上升,并在4.00 s时达到324.50 V,与额定母线电压幅值310.27 V相差较大. 如图10(c)所示,启动时逆变器1、2间的A相环流较大,峰值达到108 A, 0.80 s后,环流大小基本在[−10.0,10.0] A波动.
4.2.4 本文所提方法
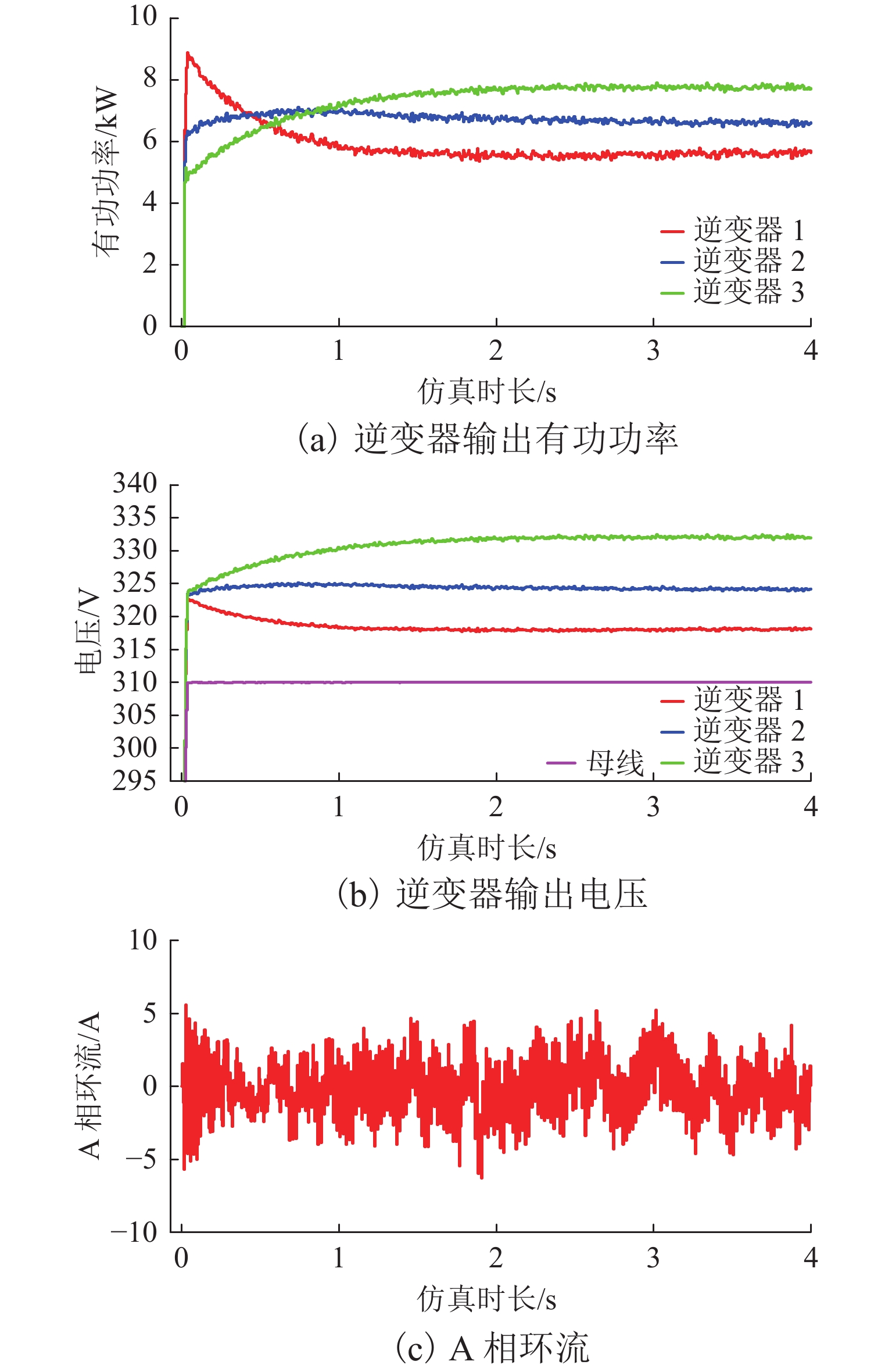
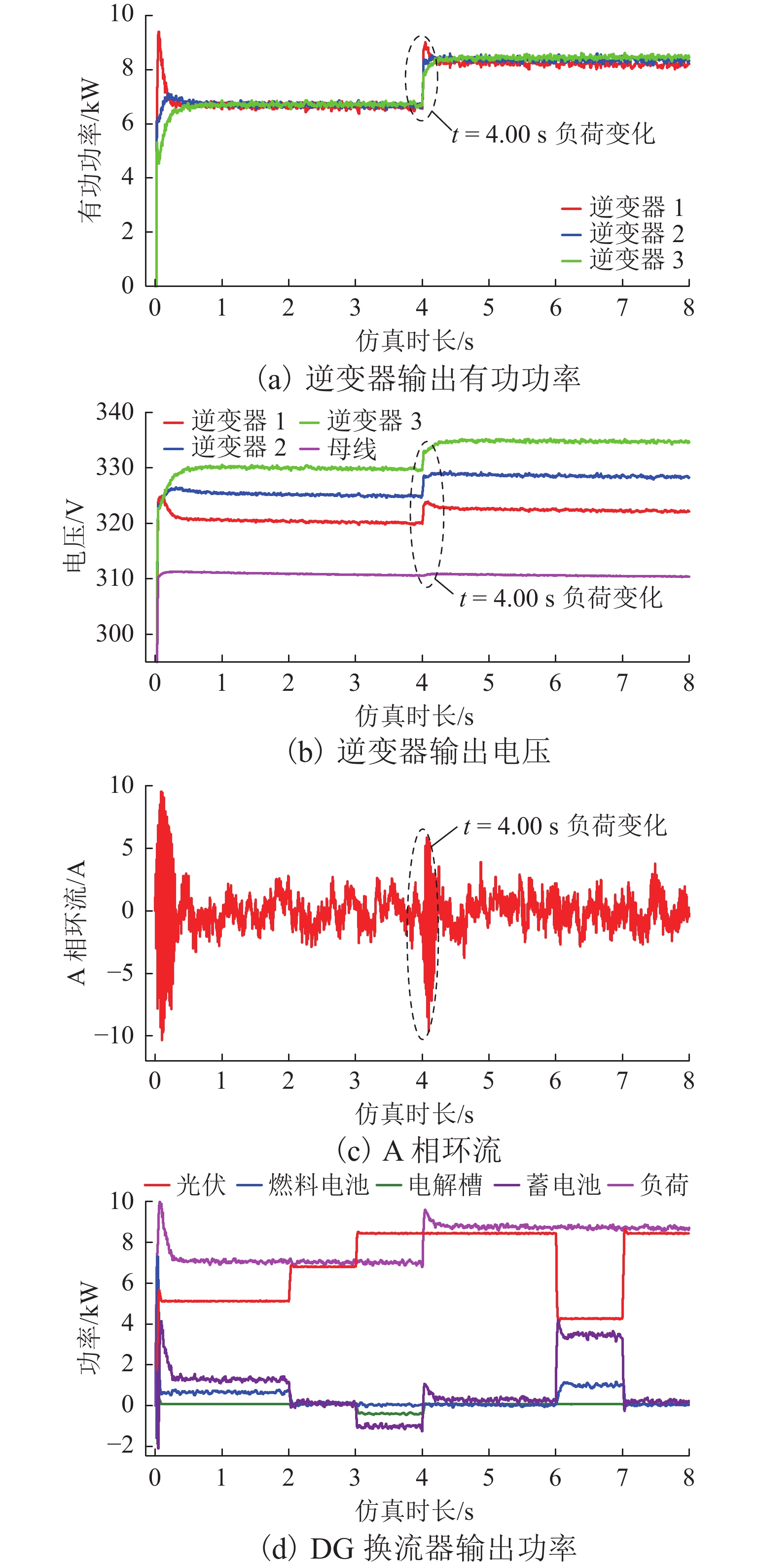
启动时,令Psum=20.00 kW,t=4.00 s时令Psum=25.00 kW,用本文所提方法对各逆变器进行控制,其他参数不变.
如图11(a)所示:各逆变器输出有功功率在启动后0.50 s时达到功率稳定,响应速度较快且功率分配精度高,准确度达97.50%;在t=4.00 s,负荷变化时,功率在0.15 s内稳定并均分. 如图11(b)所示,母线电压很快稳定在310.70 V下,并于4.00 s时重新稳定在310.60 V,与额定值310.27 V相差较小,准确度达99.86%. 如图11(c)所示,启动时及负荷变化后A相环流的峰值达到−10.3A,随后逐渐减小并基本在[−3.0,3.0] A间波动. 如图11(d)所示,在负荷和辐射度变化时,微电网1中各DG换流器的输出功率均能迅速合理分配.
5. 结 论
本文提出一种适用于逆变器控制的反下垂控制方法,并通过RT-LAB半实物仿真平台,在多电-氢微电网并联运行的交流系统中进行方法验证和对比验证,现有结论如下.
1) 本文所提方法实现了负荷变化时逆变器的额定有功功率的自适应调节.
2) 在所搭建系统中,对传统反下垂控制方法、基于电压恢复机制的反下垂控制方法、RDVD控制方法及本文所提方法进行对比验证,本文所提方法在响应速度、功率分配合理性、母线电压偏差及环流大小方面均优于其他方法.
3) 本文所提方法的各换流器的输出有功功率、母线电压等在0.50 s后快速达到基本稳定;输出有功功率分配合理,准确度达97.50%;母线电压与额定电压偏差小,准确度达99.86%;环流大小稳定在[−3.0,3.0] A;各DG在环境变化时均可随之改变输出.
-
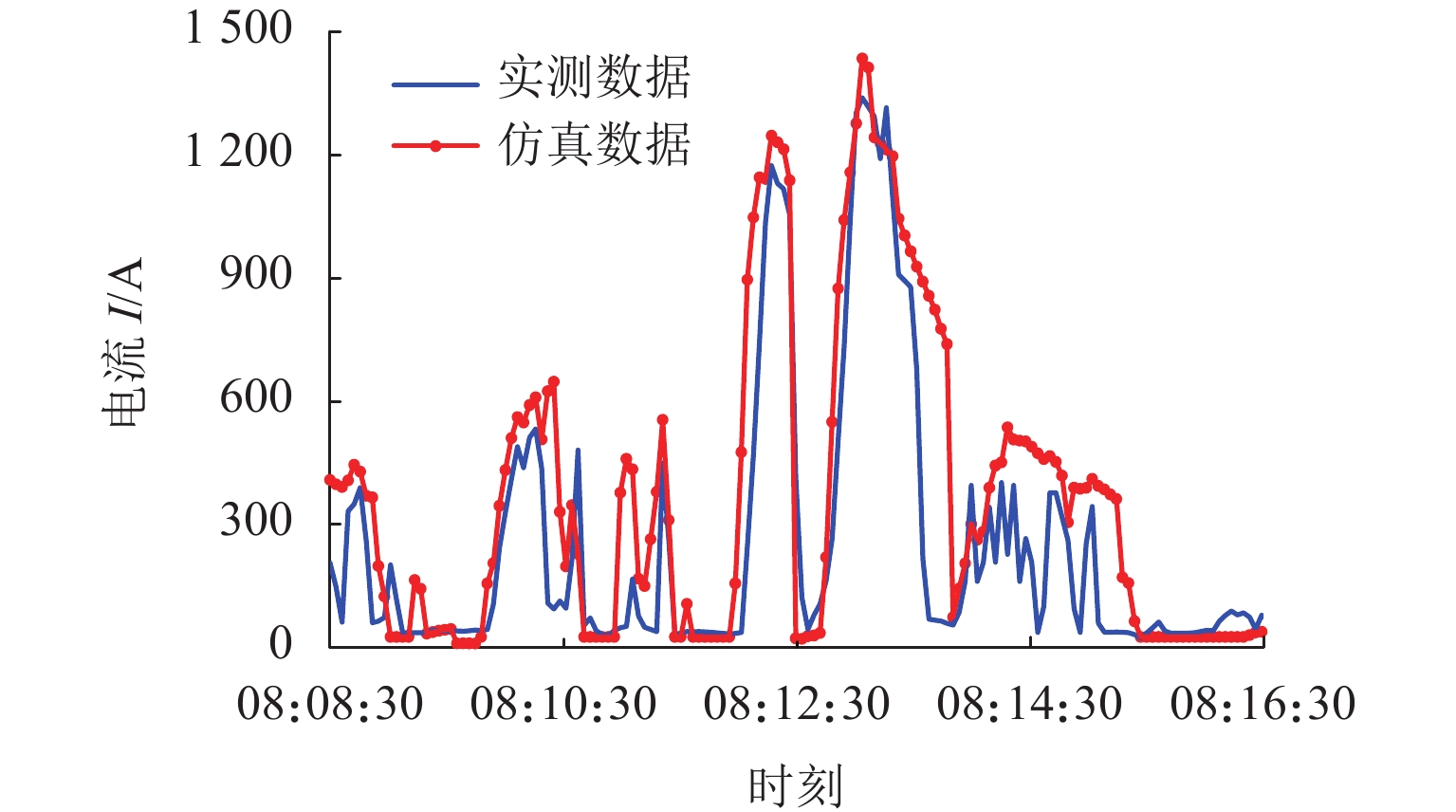
图 7 整流机组电流仿真与实测曲线对比
Figure 7. Comparison of current simulation and measured curve of rectifier unit
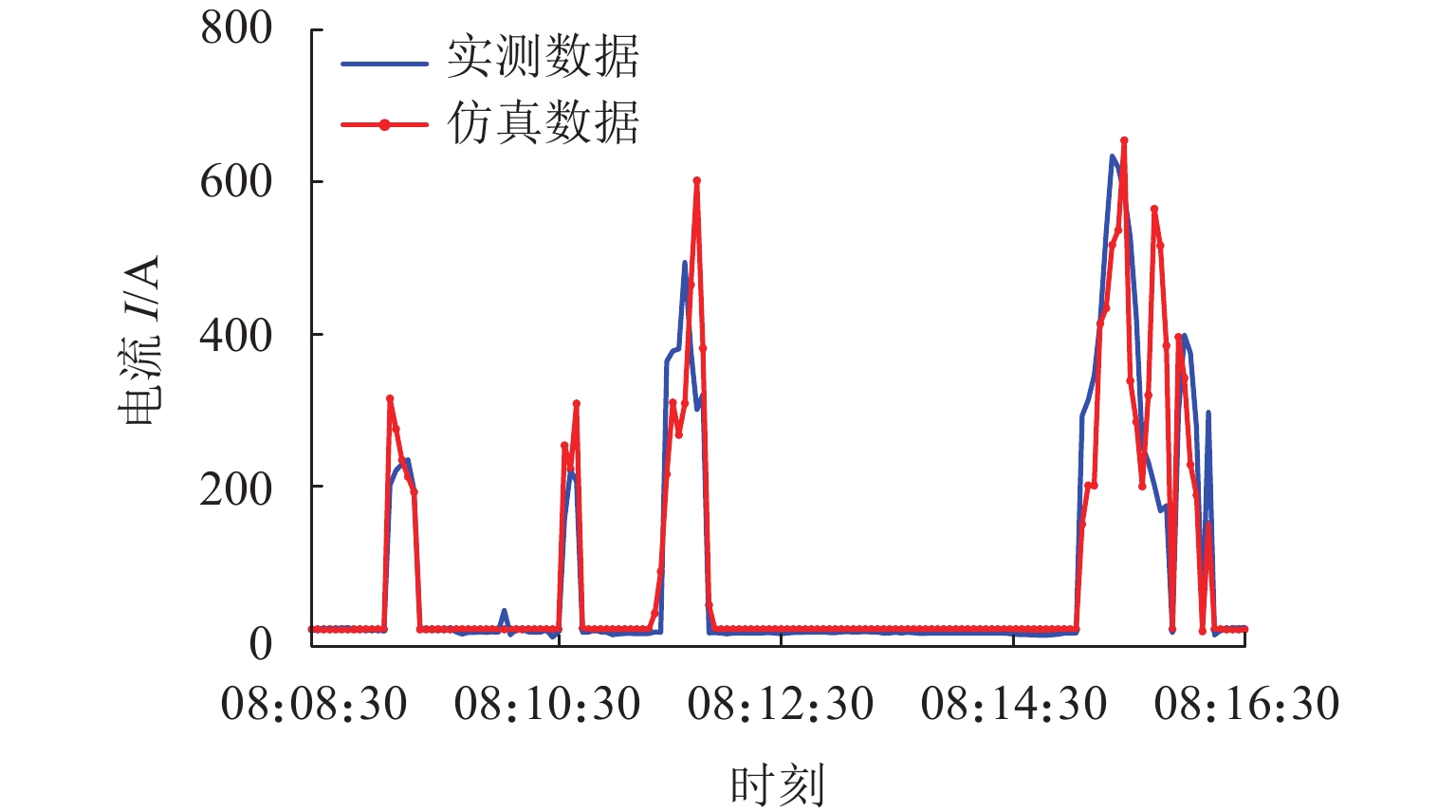
图 8 逆变回馈装置电流仿真与实测曲线对比
Figure 8. Comparison of current simulation and measured curve of inverter feedback device
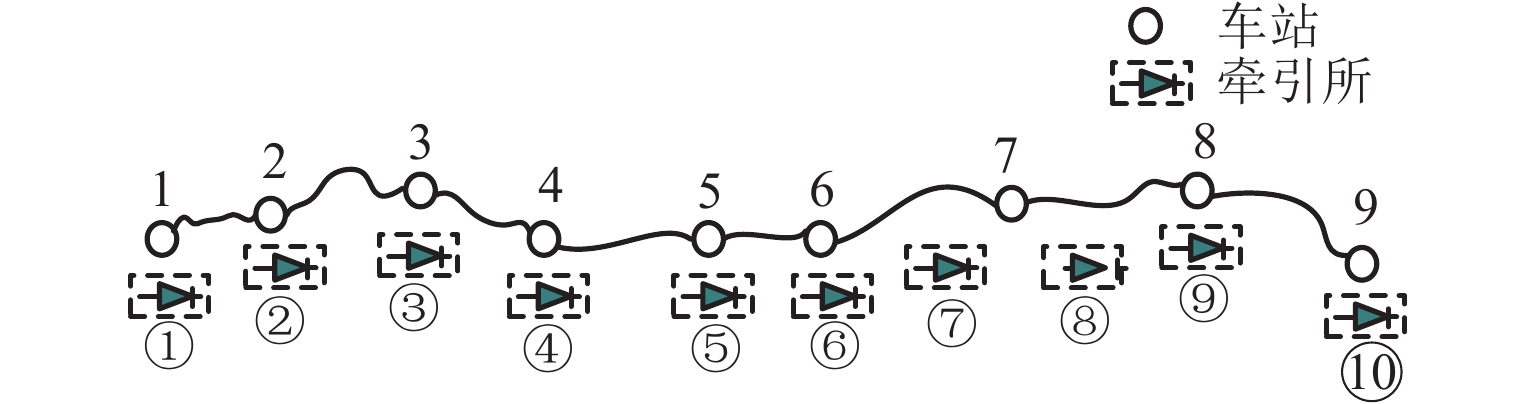
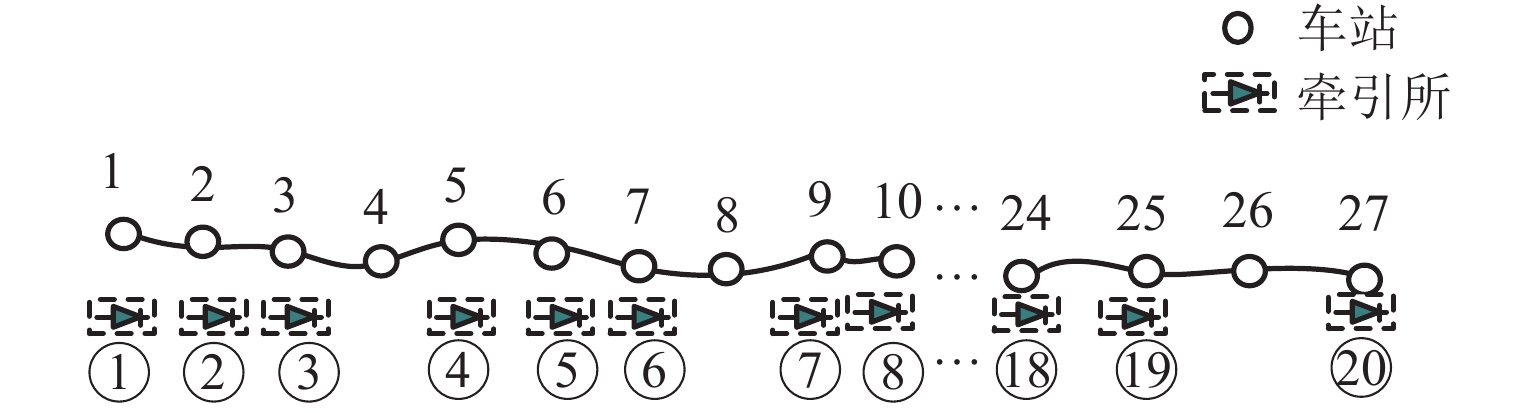
表 1 车站位置信息
Table 1. Information of station locations
车站编号 位置/km 车站编号 位置/km 1 0.243 6 13.900 2 2.456 7 18.461 3 4.568 8 23.322 4 7.804 9 25.650 5 10.670  下载: 导出CSV
下载: 导出CSV
表 2 车公里能耗与吨公里能耗实测与仿真对比
Table 2. Comparison of measured and simulated energy consumption of trains per km and per ton-km
kW•h 工况 车公里能耗 吨公里能耗 CaseA1 2.179 0.045 CaseA2 2.298 0.047 CaseA3 2.171 0.045
下载: 导出CSV
表 3 高峰小时负荷过程统计表
Table 3. Statistics of load process at peak hour
工况 整流机组
电流/A逆变装置
电流/A牵引
能耗/
(kW•h)反馈
能量/
(kW•h)装置节
能率/%均值 峰值 均值 峰值 CaseB1 262.4 1508.5 36.2 708.6 514.450 77.570 15.0 CaseB2 294.1 1471.2 39.7 597.6 580.830 90.810 16.5 CaseB3 280.4 1488.3 38.3 698.2 547.900 82.610 15.0
下载: 导出CSV
-
[1] 彭其渊,朱松年,王培. 网络列车运行图的数学模型及算法研究[J]. 铁道学报,2001,23(1): 1-8. doi: 10.3321/j.issn:1001-8360.2001.01.001PENG Qiyuan, ZHU Songnian, WANG Pei. Study on a general optimization model and its solution for railway network train diagram[J]. Journal of the China Railway Society, 2001, 23(1): 1-8. doi: 10.3321/j.issn:1001-8360.2001.01.001 [2] 彭其渊,王超宇,鲁工圆. 基于到发线运用方案的列车到达追踪间隔时间压缩方法及仿真研究[J]. 中国铁道科学,2020,41(2): 131-138. doi: 10.3969/j.issn.1001-4632.2020.02.16PENG Qiyuan, WANG Chaoyu, LU Gongyuan. Compression method and simulation of train arrival interval based on utilization of arrival-departure track[J]. China Railway Science, 2020, 41(2): 131-138. doi: 10.3969/j.issn.1001-4632.2020.02.16 [3] ALBRECHT T, OETTICH S. A new integrated approach to dynamic-schedule synchronization and energy-saving train control[J]. Computers in Railways Ⅷ, 2002, 13: 847-856. [4] SU S, LI X, TANG T, et al. A subway train timetable optimization approach based on energy-efficient operation strategy[J]. IEEE Transactions on Intelligent Transportation Systems, 2013, 14(2): 883-893. doi: 10.1109/TITS.2013.2244885 [5] 高豪,张亚东,郭进,等. 基于动态规划的列车节能运行两阶段优化方法[J]. 西南交通大学学报,2020,55(5): 946-954. doi: 10.3969/j.issn.0258-2724.20191208GAO Hao, ZHANG Yadong, GUO Jin, et al. Two-stage optimization method of train energy-efficient operation based on dynamic programming[J]. Journal of Southwest Jiaotong University, 2020, 55(5): 946-954. doi: 10.3969/j.issn.0258-2724.20191208 [6] GONZÁLEZ-GIL A, PALACIN R, BATTY P, et al. A systems approach to reduce urban rail energy consumption[J]. Energy Conversion and Management, 2014, 80: 509-524. doi: 10.1016/j.enconman.2014.01.060 [7] FAN B, ROBERTS C, WESTON P. A comparison of algorithms for minimising delay costs in disturbed railway traffic scenarios[J]. Journal of Rail Transport Planning & Management, 2012, 2(1/2): 23-33. [8] 柏赟,周雨鹤,邱宇,等. 长大下坡道区间地铁列车节能操纵方法[J]. 中国铁道科学,2018,39(1): 108-115. doi: 10.3969/j.issn.1001-4632.2018.01.15BAI Yun, ZHOU Yuhe, QIU Yu, et al. Energy-efficient control method for subway train in section with long heavy down grade[J]. China Railway Science, 2018, 39(1): 108-115. doi: 10.3969/j.issn.1001-4632.2018.01.15 [9] 王青元,冯晓云. 列车准点节能运行的控制工况最优切换研究[J]. 中国铁道科学,2016,37(2): 91-98. doi: 10.3969/j.issn.1001-4632.2016.02.13WANG Qingyuan, FENG Xiaoyun. Optimal switching for control conditions of punctual and energy efficient operation of train[J]. China Railway Science, 2016, 37(2): 91-98. doi: 10.3969/j.issn.1001-4632.2016.02.13 [10] 王青元,冯晓云,朱金陵,等. 考虑再生制动能量利用的高速列车节能最优控制仿真研究[J]. 中国铁道科学,2015,36(1): 96-103. doi: 10.3969/j.issn.1001-4632.2015.01.14WANG Qingyuan, FENG Xiaoyun, ZHU Jinling, et al. Simulation study on optimal energy-efficient control of high speed train considering regenerative brake energy[J]. China Railway Science, 2015, 36(1): 96-103. doi: 10.3969/j.issn.1001-4632.2015.01.14 [11] 刘炜,吴拓剑,禹皓元,等. 直流牵引供电系统地面储能装置建模与仿真分析[J]. 电工技术学报,2020,35(19): 4207-4215.LIU Wei, WU Tuojian, YU Haoyuan, et al. Modeling and simulation of way-side energy storage devices in DC traction power supply system[J]. Transactions of China Electrotechnical Society, 2020, 35(19): 4207-4215. [12] 刘炜,张扬鑫,张戬,等. 考虑牵引所多运行状态的城轨交直流供电计算[J]. 西南交通大学学报,2020,55(6): 1163-1170. doi: 10.3969/j.issn.0258-2724.20190854LIU Wei, ZHANG Yangxin, ZHANG Jian, et al. Calculation of urban rail AC/DC power supply with traction substation in multi-operation modes[J]. Journal of Southwest Jiaotong University, 2020, 55(6): 1163-1170. doi: 10.3969/j.issn.0258-2724.20190854 [13] 盛昭,蔡伯根,上官伟,等. 一种结合时刻表调整的列车节能驾驶优化方法[J]. 铁道学报,2019,41(10): 68-75. doi: 10.3969/j.issn.1001-8360.2019.10.010SHENG Zhao, CAI Baigen, SHANGGUAN Wei, et al. Energy-efficient optimization method for train operation combining driving strategy and timetabling[J]. Journal of the China Railway Society, 2019, 41(10): 68-75. doi: 10.3969/j.issn.1001-8360.2019.10.010 [14] 李正洋,赵军,彭其渊. 考虑多交路多编组的城市轨道线路列车交路计划优化[J]. 铁道学报,2020,42(6): 1-11. doi: 10.3969/j.issn.1001-8360.2020.06.001LI Zhengyang, ZHAO Jun, PENG Qiyuan. Optimizing the train service route plan in an urban rail transit line with multiple service routes and multiple train sizes[J]. Journal of the China Railway Society, 2020, 42(6): 1-11. doi: 10.3969/j.issn.1001-8360.2020.06.001 [15] 魏润斌,杜鹏,杨雍彬,等. 地铁列车再生制动能量利用分析与时刻表优化方法研究[J]. 铁道学报,2020,42(8): 1-9. doi: 10.3969/j.issn.1001-8360.2020.08.001WEI Runbin, DU Peng, YANG Yongbin, et al. Analysis on utilization of regenerative braking energy for metro trains and research on timetable optimization method[J]. Journal of the China Railway Society, 2020, 42(8): 1-9. doi: 10.3969/j.issn.1001-8360.2020.08.001 [16] 丁勇,刘海东,栢赟,等. 地铁列车节能运行的两阶段优化模型算法研究[J]. 交通运输系统工程与信息,2011,11(1): 96-101. doi: 10.3969/j.issn.1009-6744.2011.01.016DING Yong, LIU Haidong, BAI Yun, et al. A two-level optimization model and algorithm for energy-efficient urban train operation[J]. Journal of Transportation Systems Engineering and Information Technology, 2011, 11(1): 96-101. doi: 10.3969/j.issn.1009-6744.2011.01.016 [17] 曹佳峰,刘斌. 基于2阶段优化的高速列车节能运行仿真研究[J]. 铁道科学与工程学报,2018,15(4): 821-828. doi: 10.3969/j.issn.1672-7029.2018.04.001CAO Jiafeng, LIU Bin. Research on simulation for energy-saving operation of high-speed trains based on two-stage optimization[J]. Journal of Railway Science and Engineering, 2018, 15(4): 821-828. doi: 10.3969/j.issn.1672-7029.2018.04.001 [18] 曲健伟,冯晓云,王青元,等. 考虑冲击限制和响应下列车参考速度仿真模型[J]. 哈尔滨工业大学学报,2019,51(9): 125-129. doi: 10.11918/j.issn.0367-6234.201808069QU Jianwei, FENG Xiaoyun, WANG Qingyuan, et al. Simulation model of train reference speed considering jerk limitation and response process[J]. Journal of Harbin Institute of Technology, 2019, 51(9): 125-129. doi: 10.11918/j.issn.0367-6234.201808069 期刊类型引用(4)
1. 刘炜,李松原,唐宇宁. 轨道交通直流干扰的车-地-网动态耦合仿真. 西南交通大学学报. 2025(01): 156-165 .  本站查看
本站查看2. 刘明亮,田忠北,董鸿志,郑俊锋,朱东坡. 考虑节能降耗的轨道牵引供电系统优化仿真模型. 自动化与仪器仪表. 2024(02): 82-86 .  百度学术
百度学术3. 刘继宗,张祖涛,王浩,孔苓吉,伊敏熠,朱忠尹. 城轨交通制动能量利用技术研究现状与展望. 西南交通大学学报. 2024(06): 1322-1345 . 本站查看4. 陈林,王斌,刘斌,杨乾锋,刘炜,郑浩天. 地铁设备停电检修维护决策平台开发. 电气化铁道. 2023(04): 74-78 . 百度学术其他类型引用(2)
-

 下载:
下载:


 下载:
下载:
 百度学术
百度学术
 点击查看大图
点击查看大图

计量
- 文章访问数: 389
- HTML全文浏览量: 1091
- PDF下载量: 44
- 被引次数: 6