- ISSN 0258-2724
- CN 51-1277/U
- EI Compendex
- Scopus
- Indexed by Core Journals of China, Chinese S&T Journal Citation Reports
- Chinese S&T Journal Citation Reports
- Chinese Science Citation Database

| Citation: | XU Jingmang, LIANG Xinyuan, WANG Kai, ZHAO Siqi, WANG Ping. Influence of Fastener Stiffness Nonlinearity on Wheel–Rail Transient Rolling Contact Behavior in Corrugated Area[J]. Journal of Southwest Jiaotong University, 2024, 59(2): 247-255. doi: 10.3969/j.issn.0258-2724.20211043

|
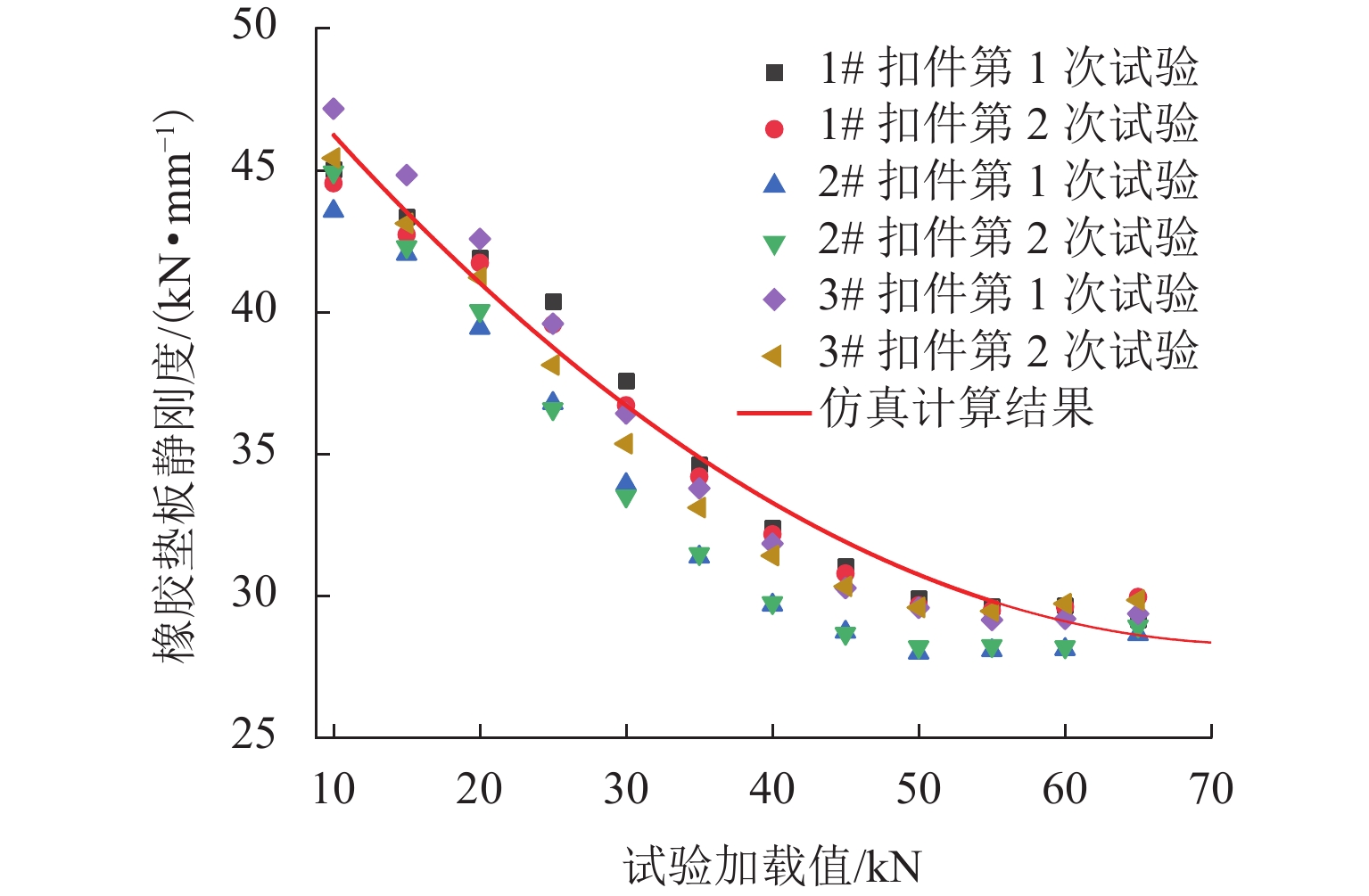
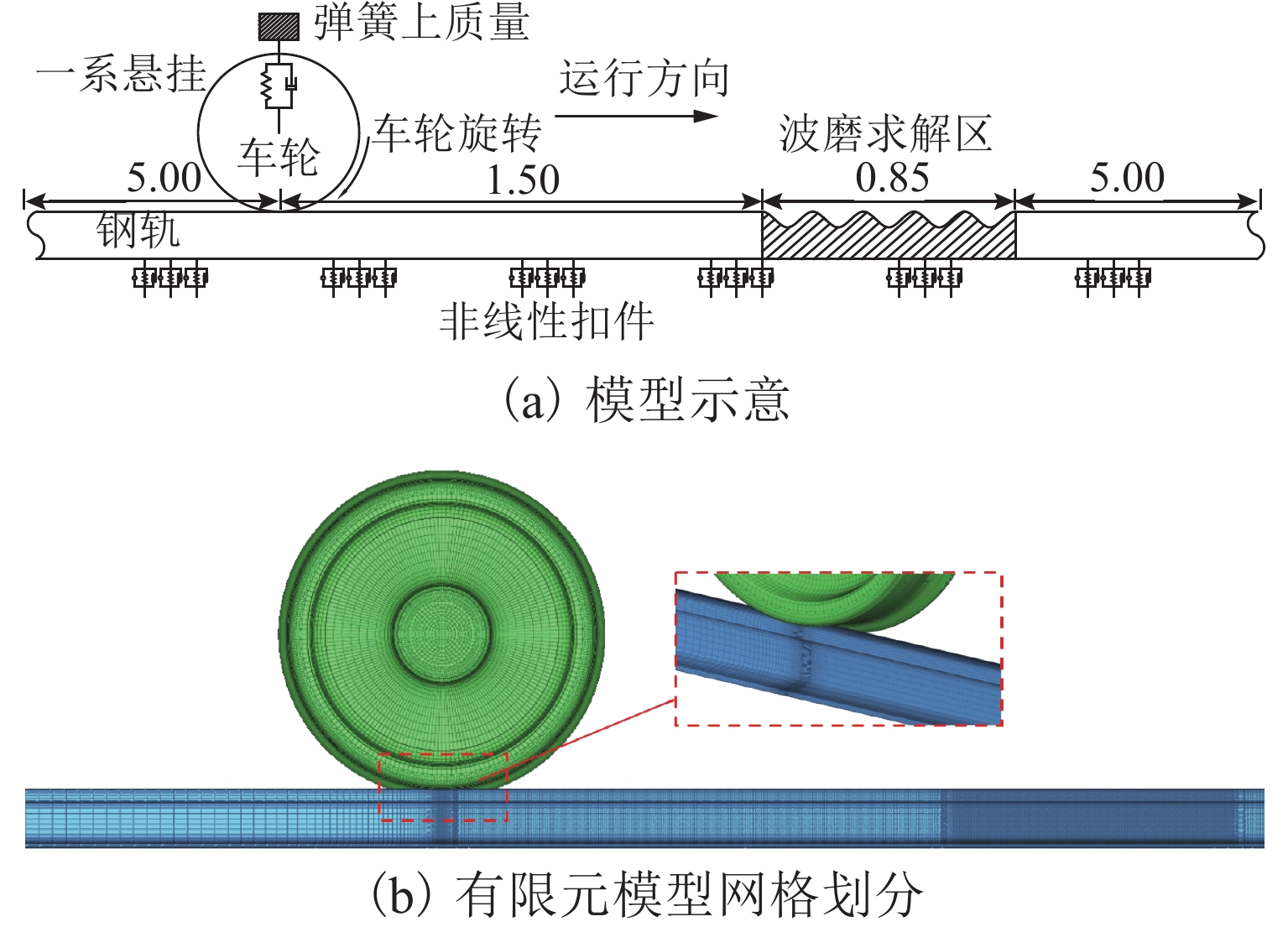
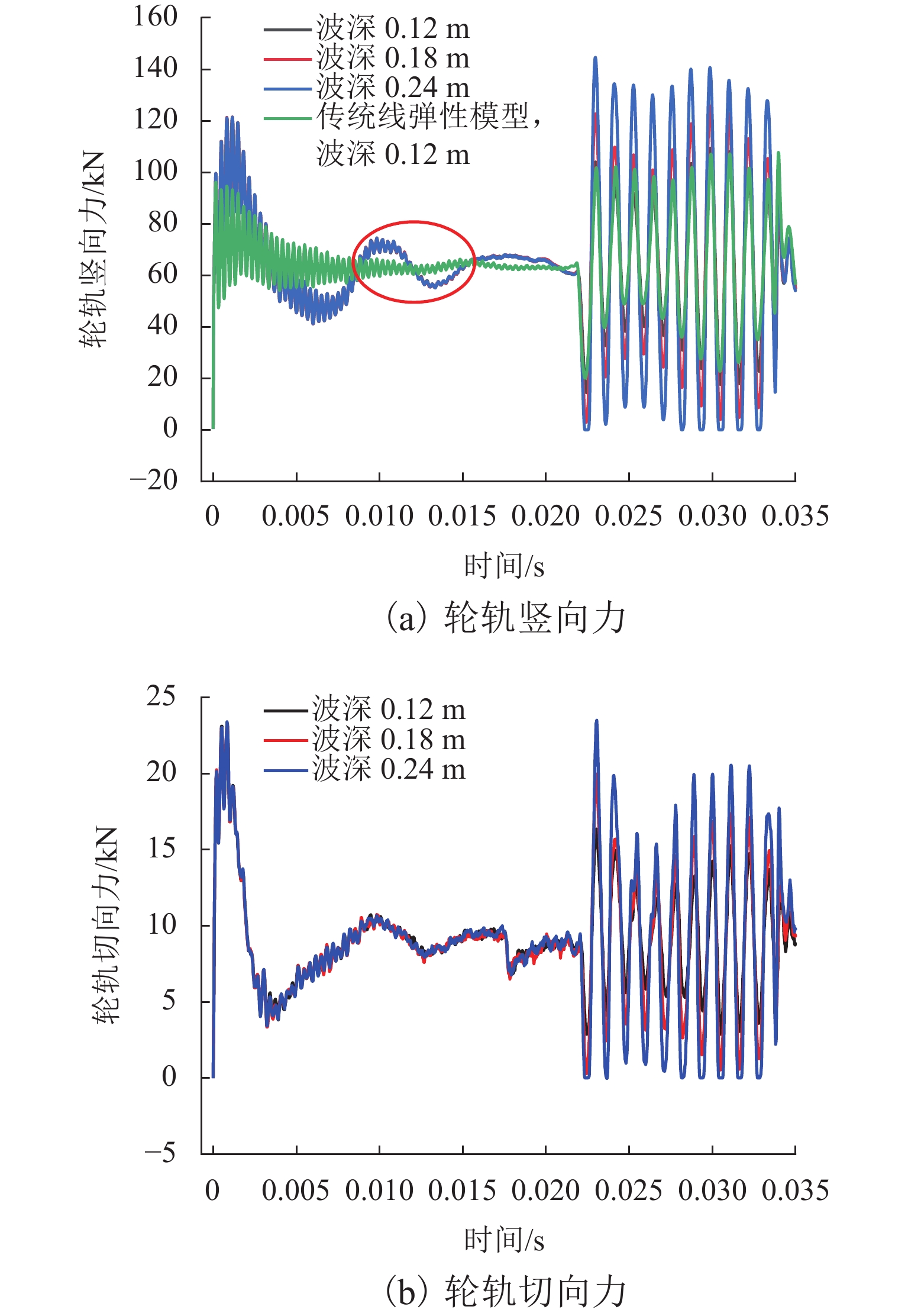
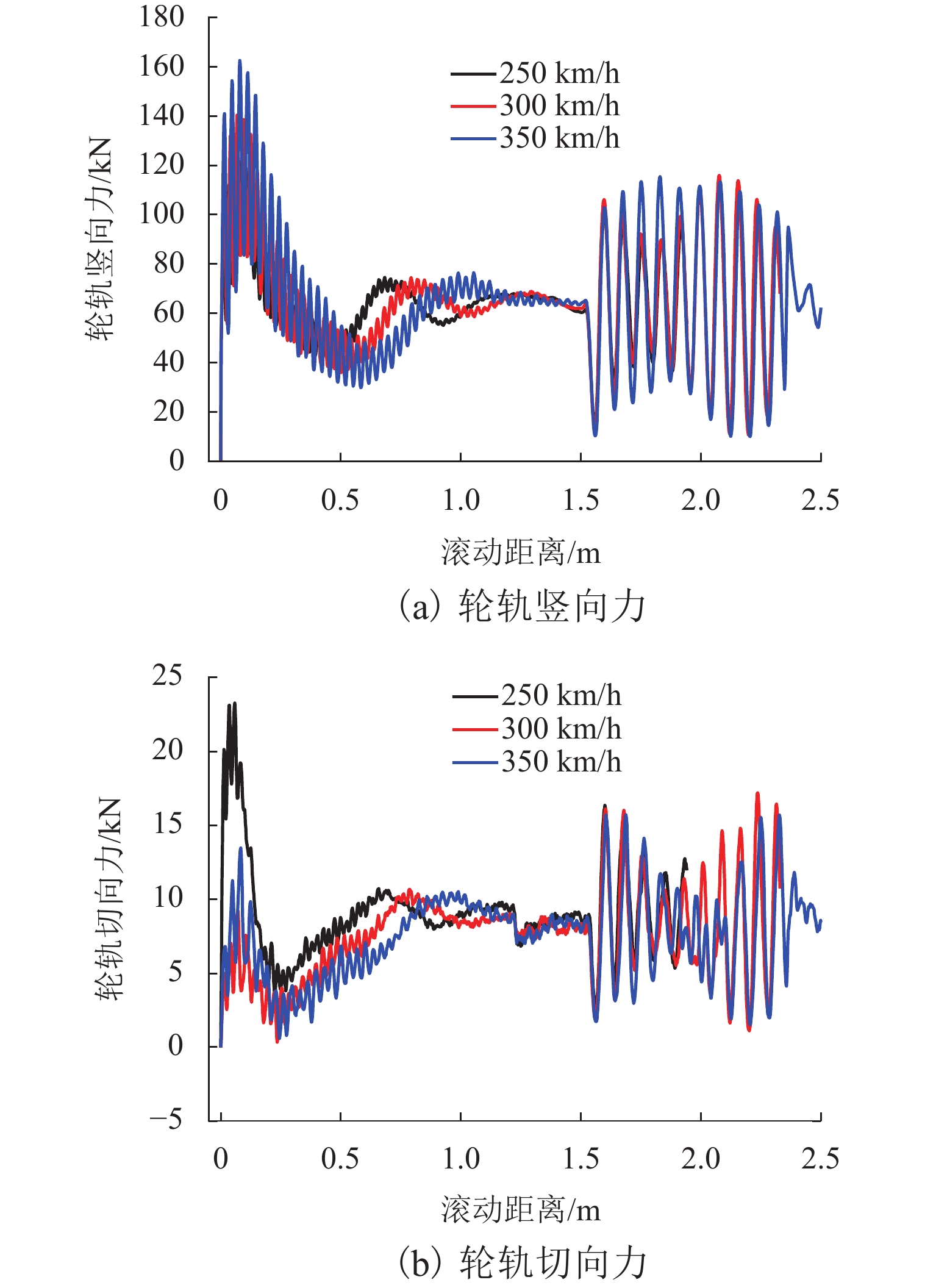
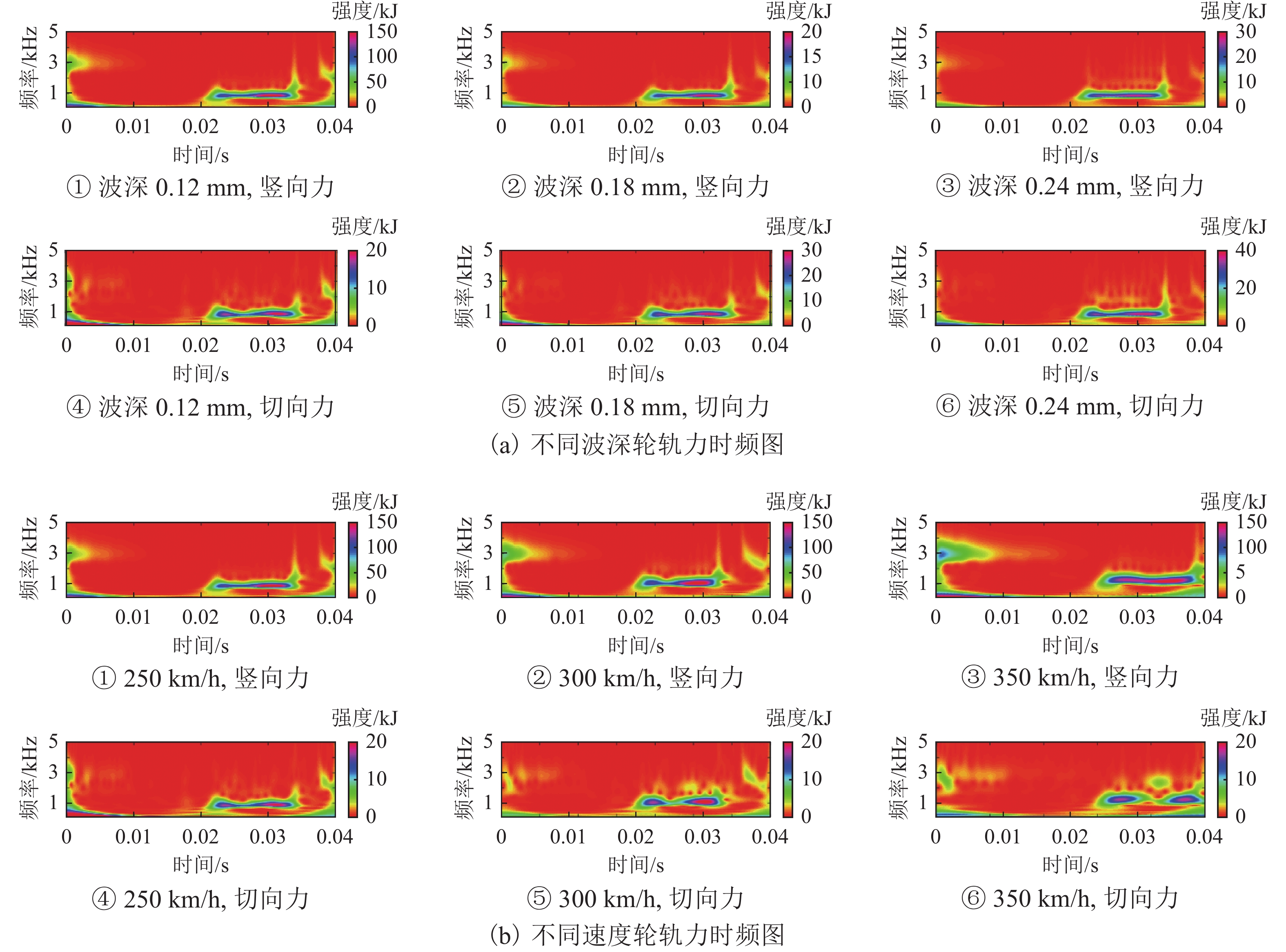
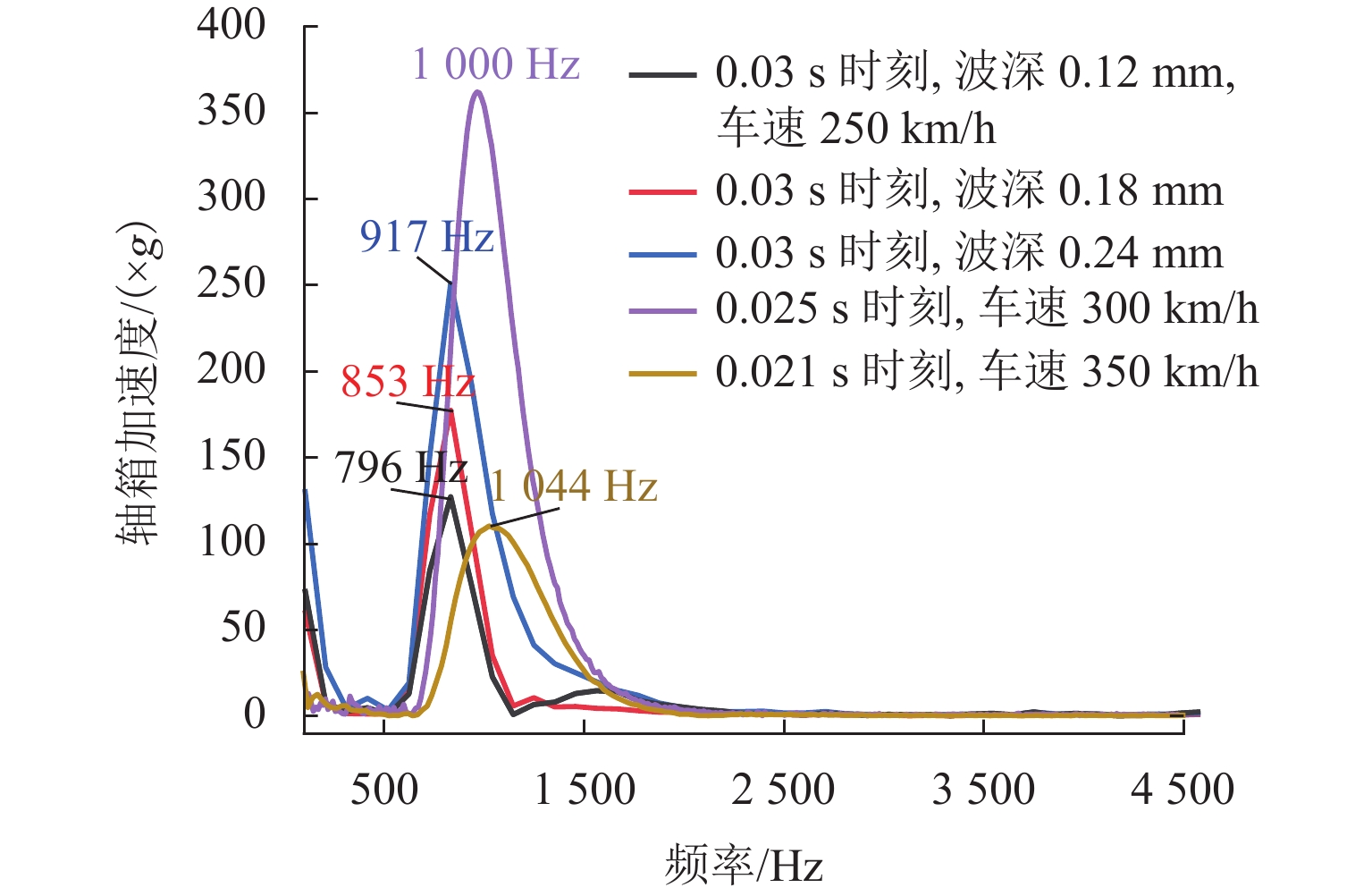
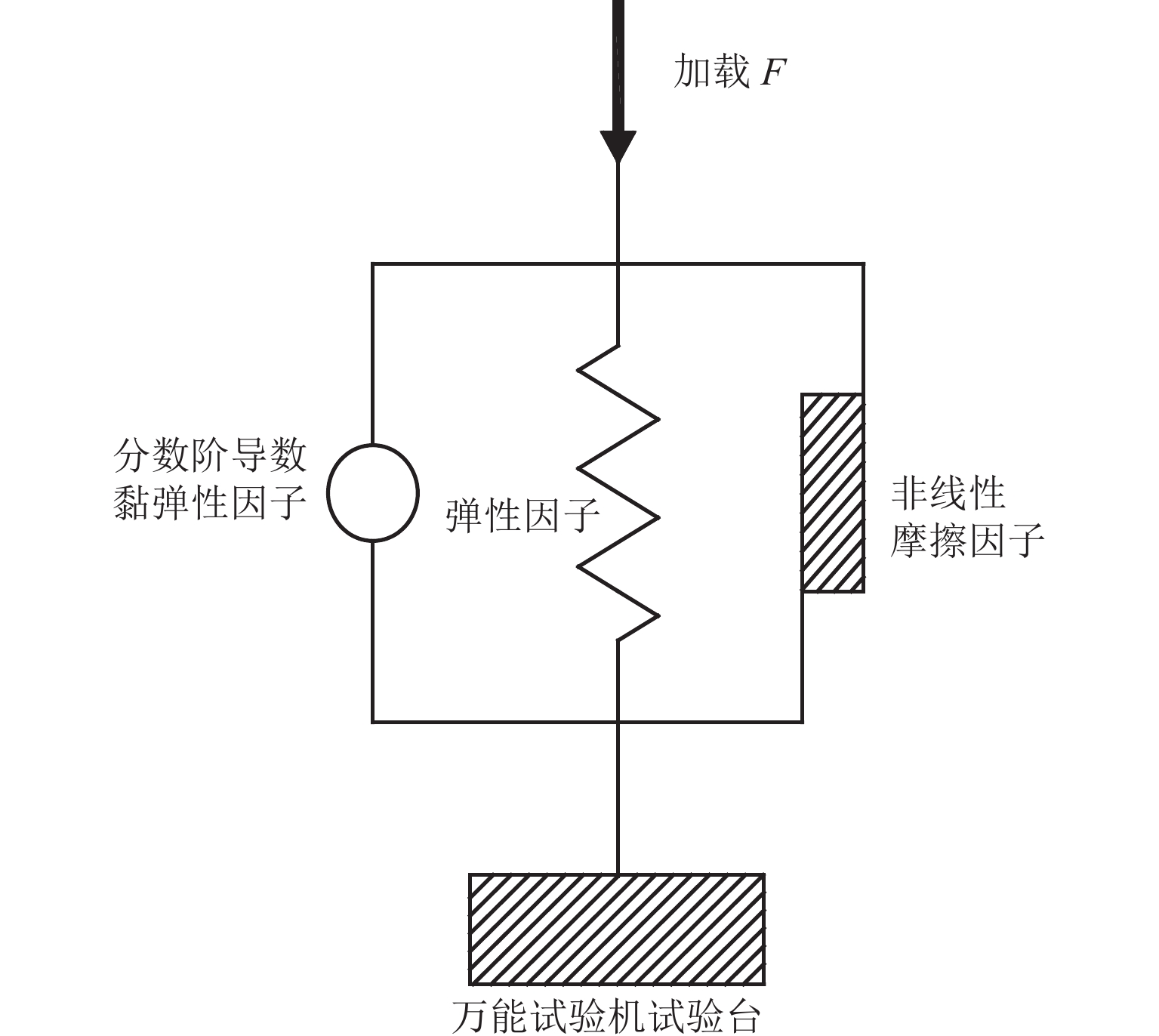
The stiffness of the rubber pad of the WJ-8 fastener exhibits nonlinear characteristics during long-term service, and the static stiffness decreases with the increase in the load. In order to improve the calculation accuracy of the three-dimensional transient rolling contact finite element model, the LMA tread wheel and CHN60 rail were used. Based on the explicit integration algorithm, the linear elastic fasteners in the previous research were transformed into nonlinear fasteners to establish a three-dimensional wheel–rail transient rolling contact finite element model considering the nonlinear characteristics of fastener stiffness. The influence of stiffness nonlinearity on the high-frequency dynamic response and transient contact behavior between wheel and rail corrugation was studied, and the change of wheel–rail contact force and axle box acceleration in the time-frequency domain under corrugation conditions was analyzed. The results show that the nonlinearity of the fastener has an obvious effect on the change of the wheel–rail contact force. The main manifestation is that when the wheel travels to the front end of the fastener, the strong vibration makes the rubber pad soft, which reduces the contact force of the wheel and rail. In addition, when the wheel travels above the fastener, the vibration is weakened under the action of the axle load; the stiffness characteristic increases the wheel-rail contact force, and the difference between the wheel–rail force changes is up to 13.1%.

| [1] |
朱胜阳. 高速铁路无砟轨道结构伤损行为及其对动态性能的影响[D]. 成都: 西南交通大学, 2015.
|
| [2] |
BRUNI S, COLLINA A. Modelling the viscoelastic behaviour of elastomeric components: an application to the simulation of train-track interaction[J]. Vehicle System Dynamics, 2000, 34(4): 283-301. doi: 10.1076/vesd.34.4.283.2061
|
| [3] |
GIL-NEGRETE N, VIÑOLAS J, KARI L. A nonlinear rubber material model combining fractional order viscoelasticity and amplitude dependent effects[J]. Journal of Applied Mechanics, 2009, 76: 011009.1-011009.9.
|
| [4] |
SJÖBERG M M, KARI L. Non-linear behavior of a rubber isolator system using fractional derivatives[J]. Vehicle System Dynamics, 2002, 37(3): 217-236. doi: 10.1076/vesd.37.3.217.3532
|
| [5] |
吴杰,上官文斌. 采用黏弹性分数导数模型的橡胶隔振器动态特性的建模及应用[J]. 工程力学,2008,25(1): 161-166.
WU Jie, SHANGGUAN Wenbin. Modeling and applications of dynamic characteristics for rubber isolators using viscoelastic fractional derivative model[J]. Engineering Mechanics, 2008, 25(1): 161-166.
|
| [6] |
WU T X, THOMPSON D J. Theoretical investigation of wheel/rail non-linear interaction due to roughness excitation[J]. Vehicle System Dynamics, 2000, 34(4): 261-282. doi: 10.1076/vesd.34.4.261.2060
|
| [7] |
YANG Z, BOOGAARD A, WEI Z L, et al. Numerical study of wheel-rail impact contact solutions at an insulated rail joint[J]. International Journal of Mechanical Sciences, 2018, 138/139: 310-322. doi: 10.1016/j.ijmecsci.2018.02.025
|
| [8] |
BERG M. A non-linear rubber spring model for rail vehicle dynamics analysis[J]. Vehicle System Dynamics, 1998, 30(3/4): 197-212.
|
| [9] |
ZHU S Y, CAI C B, SPANOS P D. A nonlinear and fractional derivative viscoelastic model for rail pads in the dynamic analysis of coupled vehicle-slab track systems[J]. Journal of Sound and Vibration, 2015, 335: 304-320. doi: 10.1016/j.jsv.2014.09.034
|
| [10] |
张大伟,翟婉明,朱胜阳,等. 基于橡胶弹簧非线性模型的重载车辆轮轨动力特征分析[J]. 铁道学报,2016,38(12): 19-27.
ZHANG Dawei, ZHAI Wanming, ZHU Shengyang, et al. Wheel/rail dynamic interaction between heavy-haul freight car and ballasted track based on a nonlinear rubber spring model[J]. Journal of the China Railway Society, 2016, 38(12): 19-27.
|
| [11] |
BAGLEY R L, TORVIK P J. Fractional calculus-A different approach to the analysis of viscoelastically damped structures[J]. AIAA Journal, 1983, 21(5): 741-748. doi: 10.2514/3.8142
|
| [12] |
赵鑫,温泽峰,王衡禹,等. 三维高速轮轨瞬态滚动接触有限元模型及其应用[J]. 机械工程学报,2013,49(18): 1-7. doi: 10.3901/JME.2013.18.001
ZHAO Xin, WEN Zefeng, WANG Hengyu, et al. 3D transient finite element model for high-speed wheel-rail rolling contact and its application[J]. Journal of Mechanical Engineering, 2013, 49(18): 1-7. doi: 10.3901/JME.2013.18.001
|
| [13] |
谷永磊. 高速铁路无砟轨道钢轨波浪形磨损机理研究[D]. 北京: 北京交通大学, 2017.
|
| [14] |
徐井芒,王凯,高原,等. 高速铁路无缝钢轨断缝瞬态冲击行为分析[J]. 西南交通大学学报,2020,55(6): 1348-1354.
XU Jingmang, WANG Kai, GAO Yuan, et al. Transient impact behavior analysis of rail broken gap on high-speed continuous welded rail[J]. Journal of Southwest Jiaotong University, 2020, 55(6): 1348-1354.
|
| [15] |
韩立,伍向阳,刘兰华,等. 基于Morlet小波分析的高速铁路轮轨粗糙度声学特征[J]. 铁道建筑,2020,60(5): 89-93.
HAN Li, WU Xiangyang, LIU Lanhua, et al. Acoustic characteristics of high speed railway wheel-rail roughness based on morlet wavelet analysis[J]. Railway Engineering, 2020, 60(5): 89-93.
|
| [16] |
李伟. 地铁钢轨波磨成因及其对车辆/轨道行为的影响[D]. 成都: 西南交通大学, 2015.
|
Figures(11) / Tables(1)


 DownLoad:
DownLoad: