

Zero-Power Control of Hybrid Magnetic Levitation System Based on Particle Swarm Optimization
-
摘要:
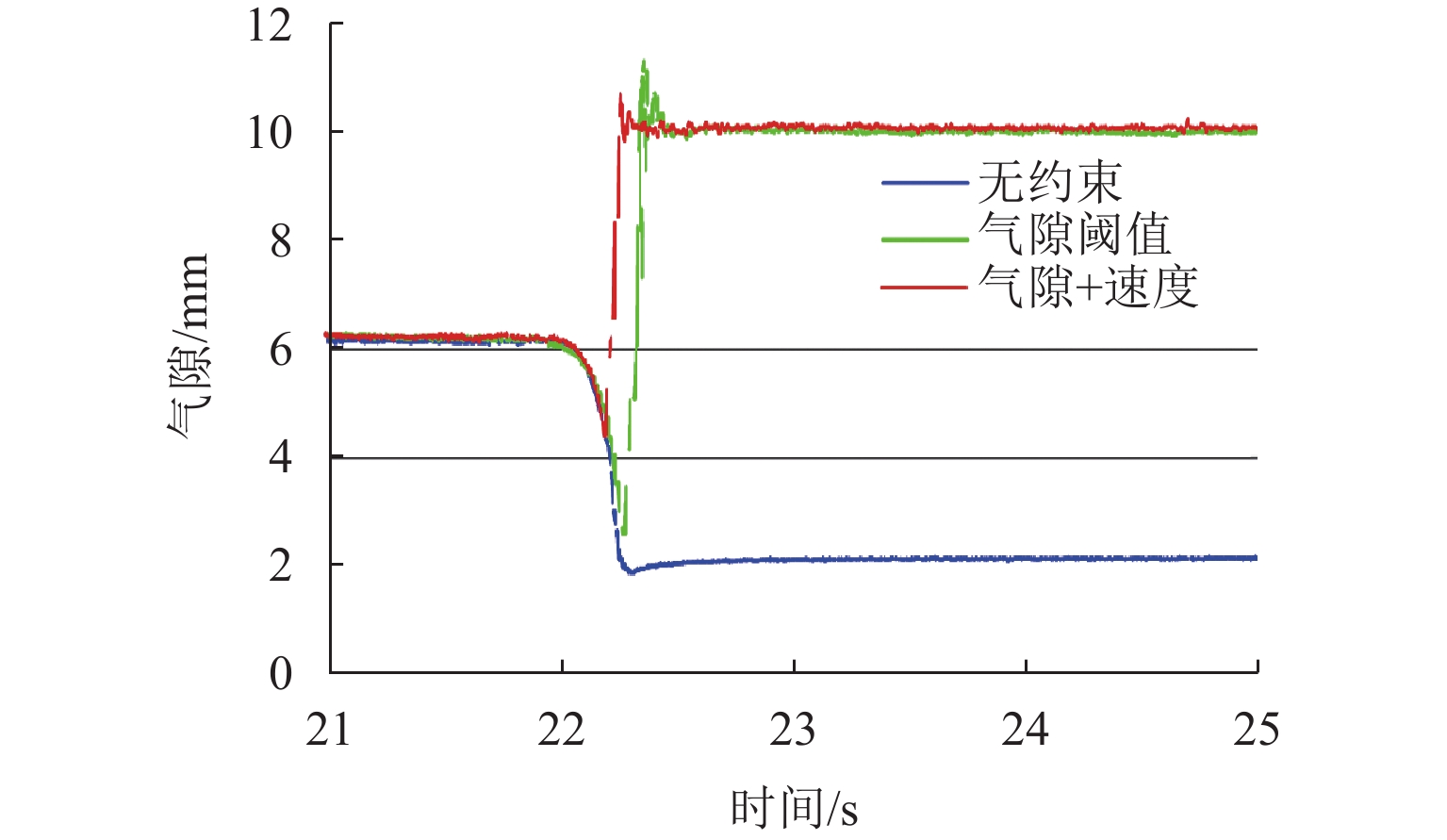
为有效抑制永磁电磁混合悬浮系统在零功率控制过程中出现的气隙超调与碰撞问题,提出一种基于电流积分反馈的自适应超螺旋滑模零功率控制器,并利用粒子群优化(PSO)算法对电流积分系数进行在线整定. 首先,建立混合悬浮系统的数学模型,基于电流积分反馈策略设计零功率控制器;在此基础上,构造快速非奇异终端(FNST)滑模面以加速收敛,并在超螺旋滑模控制中引入自适应双模态切换策略,形成零功率控制器,实现系统在干扰下的快速气隙调整与跟踪. 针对控制器中固定积分系数所引发的问题,分析其对系统动态性能的影响,利用PSO算法对积分系数进行在线优化,使其能够根据系统状态实时调整,有效抑制气隙超调、提升收敛速度,从而改善整体控制性能. 此外,为降低零功率控制过程中的撞轨风险,在传统气隙阈值策略基础上引入气隙速度信息,构建“速度 + 尺寸”双重判据,增强垂直方向的碰撞预测能力. 仿真与实验结果表明:所提策略可显著降低气隙超调并加快收敛过程,超调量小于0.30 mm,收敛时间缩短至0.67 s;相比传统阈值法,提出的双重判据可将判断时间提前约0.10 s,气隙超调降低1.70 mm,能更有效预测并预防碰撞发生.
Abstract:To effectively suppress the airgap overshoot and collision issues during the zero-power control process of the hybrid permanent magnet electromagnetic levitation system, an adaptive super-twisting sliding mode zero-power controller based on current integral feedback was proposed, and the particle swarm optimization (PSO) algorithm was utilized for online tuning of the current integral coefficient. First, the mathematical model of the hybrid levitation system was established, and a zero-power controller was designed based on the current integral feedback strategy. On this basis, a fast non-singular terminal (FNST) sliding mode surface was constructed to accelerate convergence, and an adaptive dual-mode switching strategy was introduced into the super-twisting sliding mode control to form the zero-power controller, realizing rapid airgap adjustment and tracking under disturbances. To address the problems caused by the fixed integral coefficient in the controller, its impact on the dynamic performance of the system was analyzed. The PSO algorithm was utilized for online optimization of the integral coefficient, enabling it to adjust in real time according to the system state, effectively suppressing airgap overshoot, improving convergence speed, and thereby enhancing the overall control performance. Furthermore, to reduce the risk of track collision during the zero-power control process, airgap velocity information was introduced based on the traditional airgap threshold strategy to construct a “velocity + size” dual criterion, enhancing the collision prediction capability in the vertical direction. Simulation and experimental results indicate that the proposed strategy significantly reduces airgap overshoot and accelerates the convergence process. The overshoot is less than 0.30 mm, and the convergence time is shortened to 0.67 s; compared with the traditional threshold method, the proposed dual criterion advances the decision time by approximately 0.10 s, reduces the airgap overshoot by 1.70 mm, and can more effectively predict and prevent the occurrence of collisions.
-
Key words:
- magnetic levitation /
- zero-power control /
- nonlinear system /
- particle swarm optimization
-
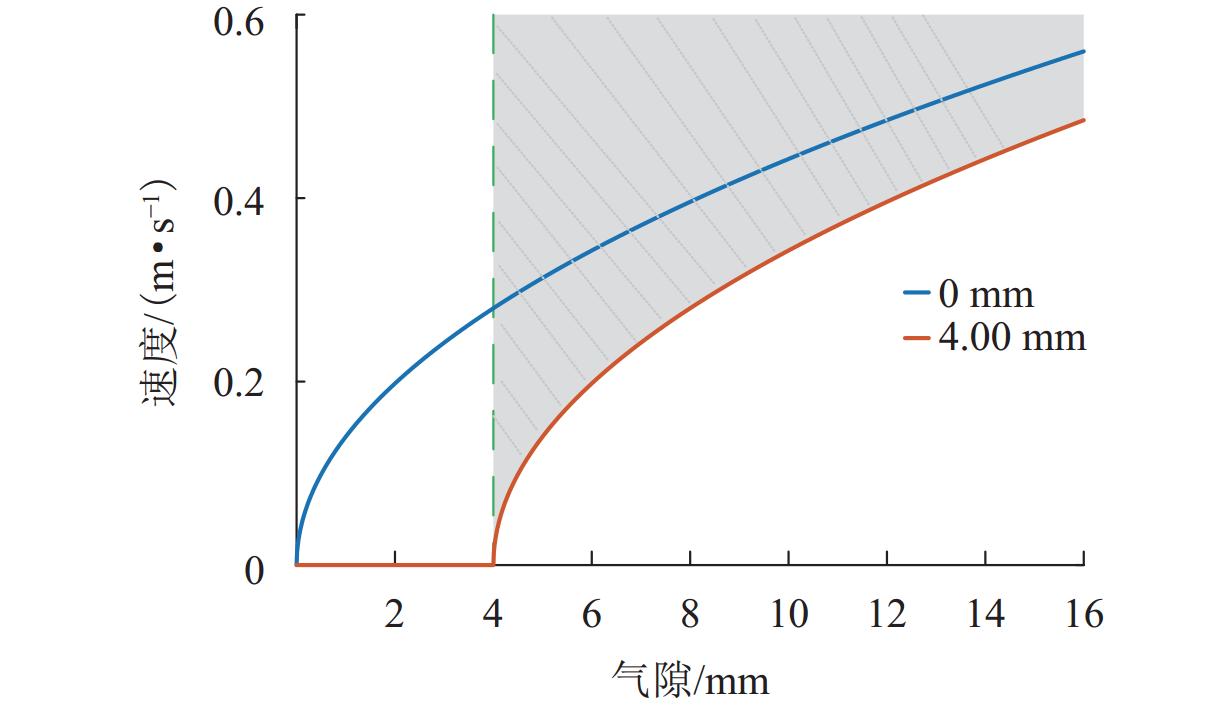
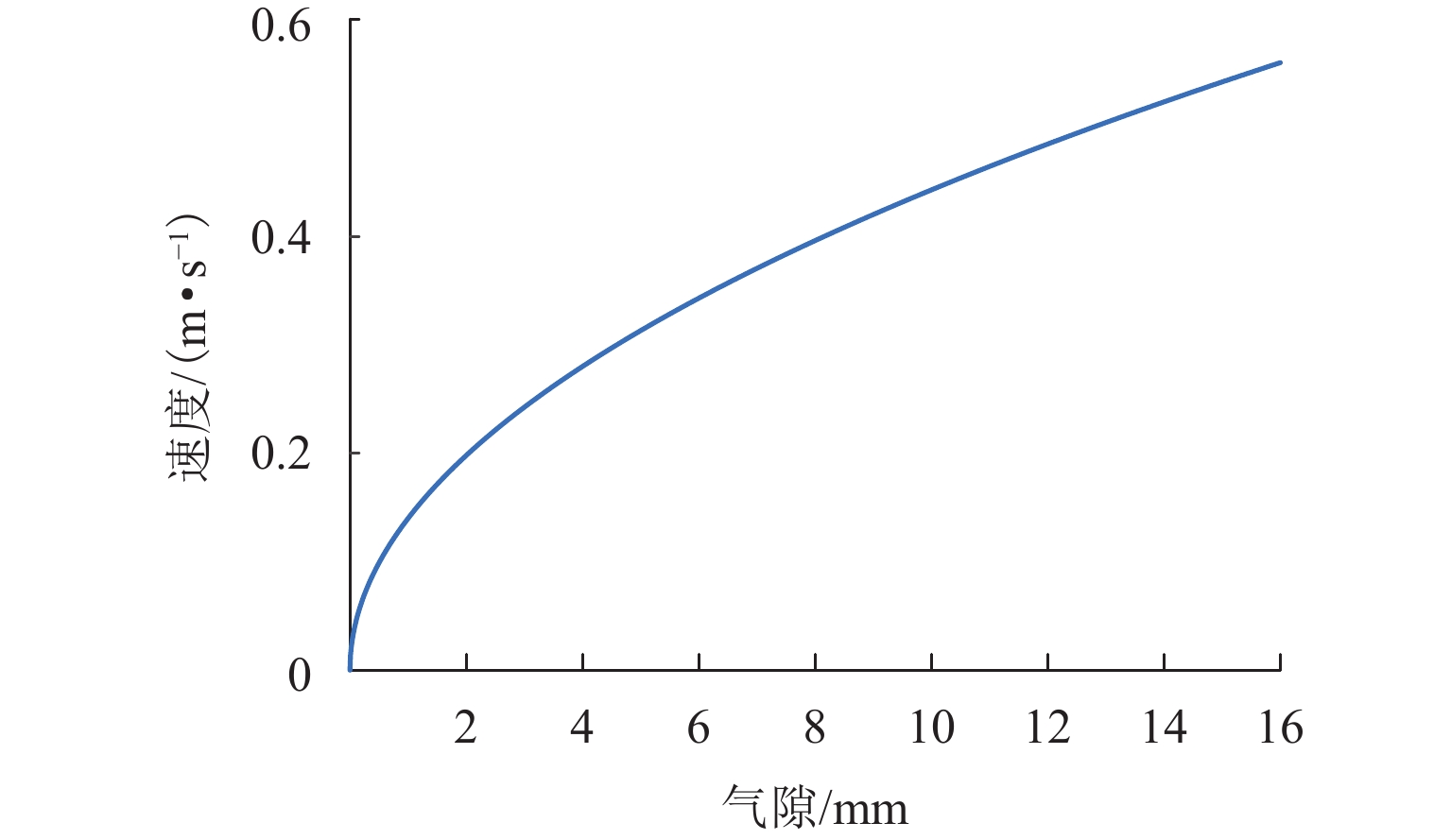
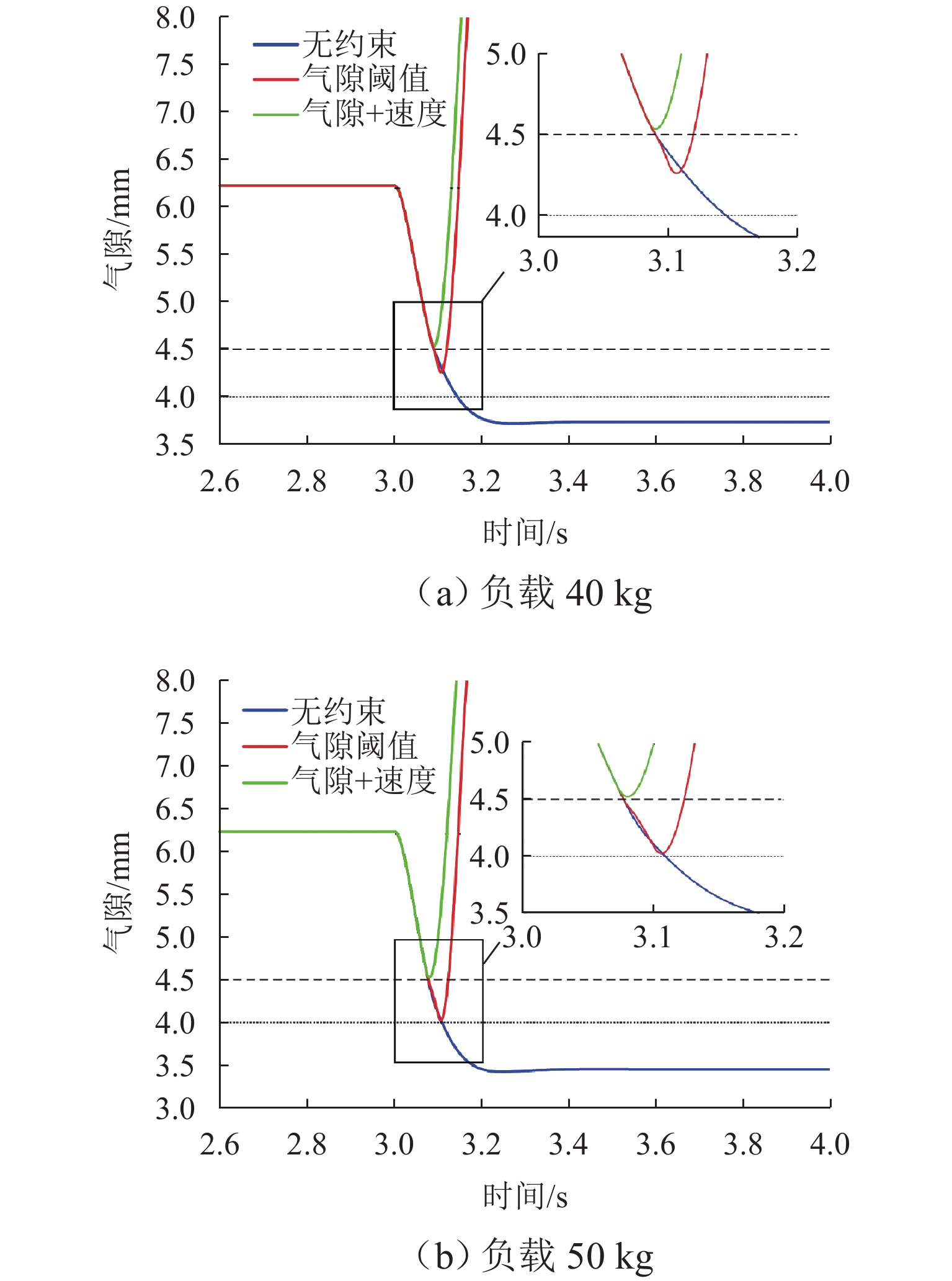
图 6 安全阈值为4 mm时间隙-速度临界曲线
Figure 6. Gap and velocity critical curve at safety threshold of 4 mm
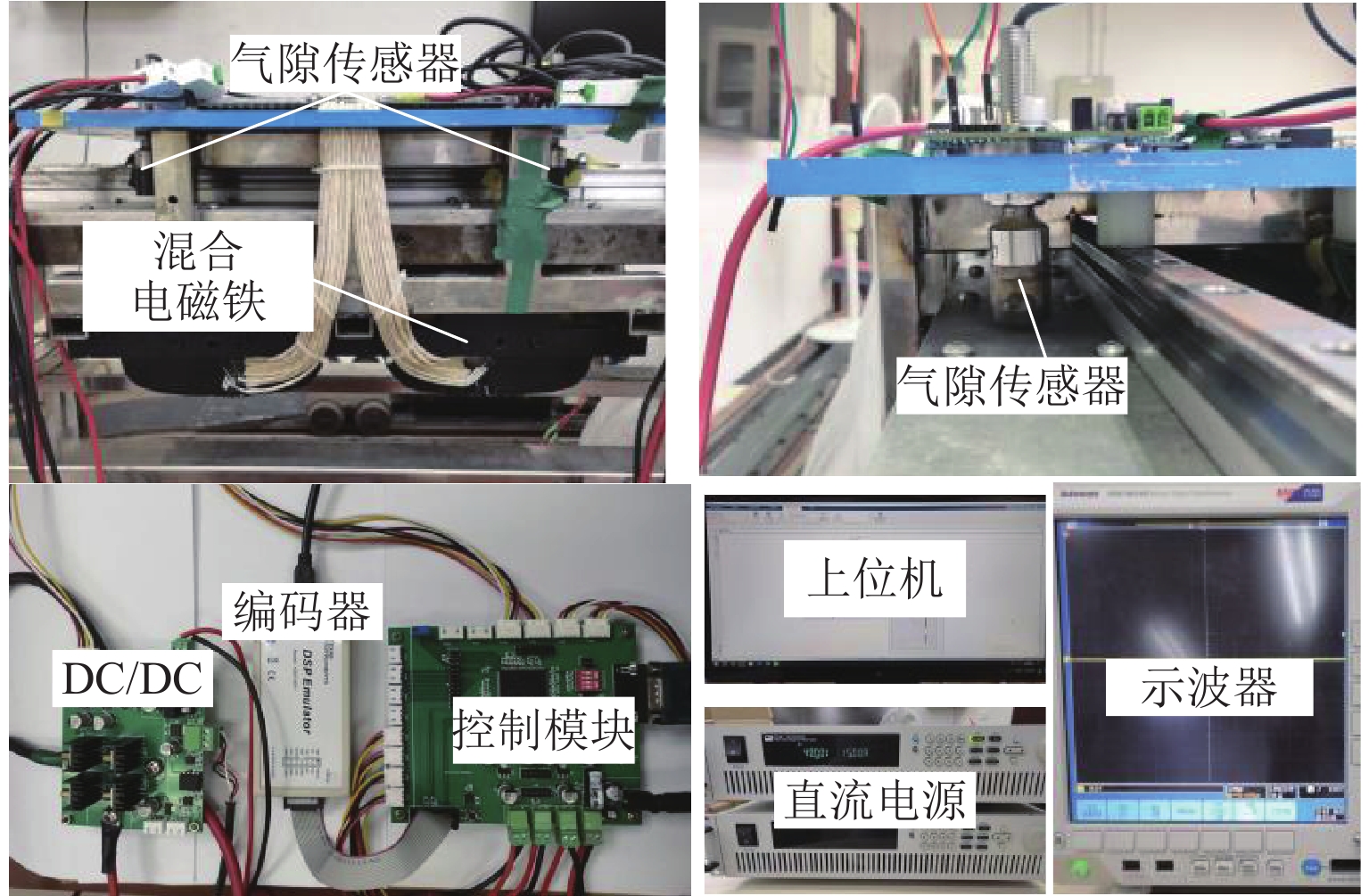
表 1 平台参数
Table 1. Platform parameters
参数 数值 hpm/mm 6 N/匝 550 Hc/(A·m−1) 5.8 × 105 A/m2 0.0025 m/kg 50 μ0/(H·m−1) 4π × 10−7 μr 1.05 初始气隙/mm 16 额定气隙/mm 6.2 线圈电阻/Ω 3  下载: 导出CSV
下载: 导出CSV
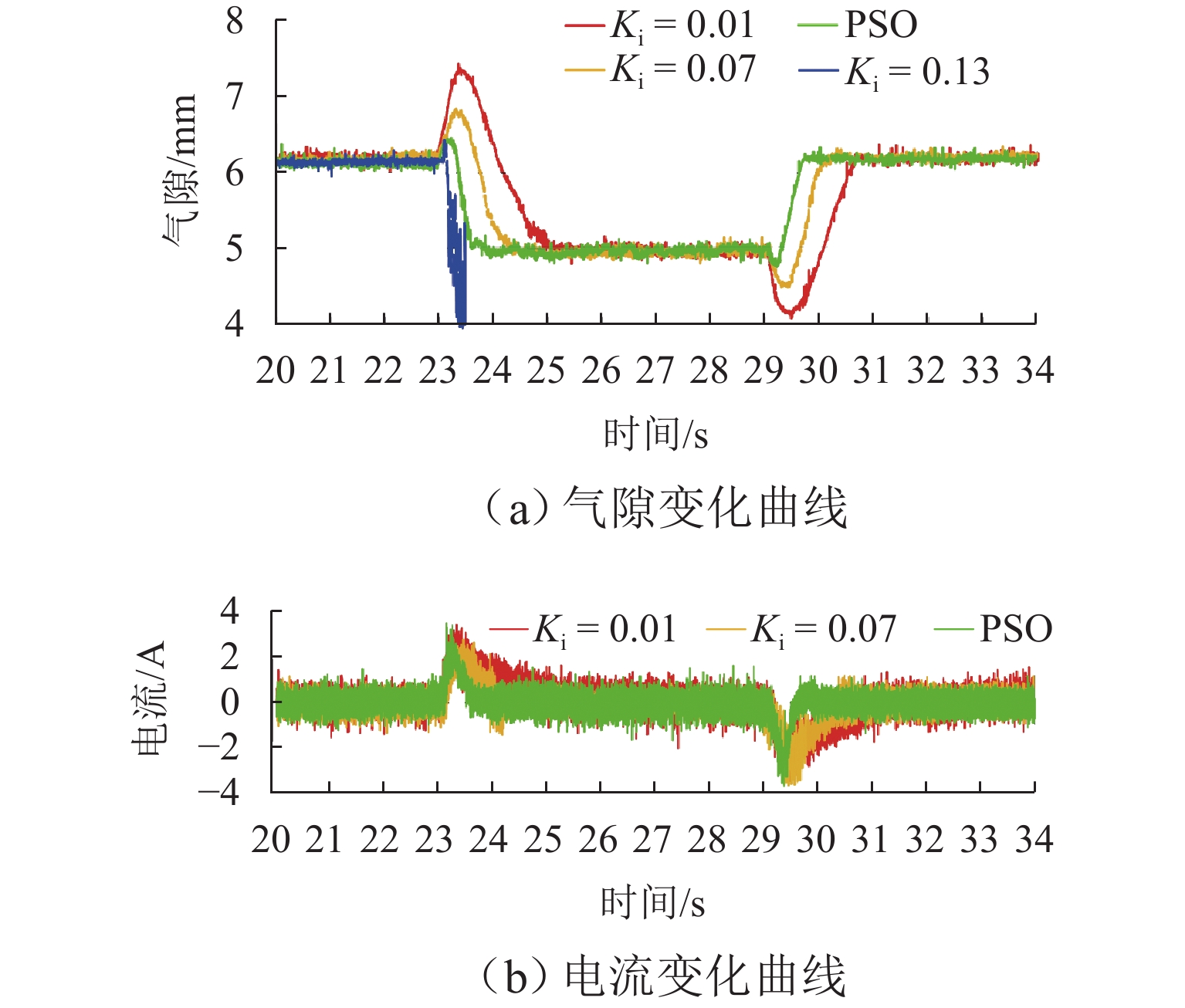
表 2 仿真工况1的气隙超调和收敛时间
Table 2. Airgap overshoot and convergence time of simulation condition 1
Ki 加载 减载 超调/mm 收敛时间/s 超调/mm 收敛时间/s 0.01 0.41 (100%) 1.27 (100%) 0.36 (100%) 1.63 (100%) 0.07 0.21 (51%) 0.51 (40%) 0.18 (50%) 0.71 (44%) PSO 0.14 (34%) 0.22 (17%) 0.05 (14%) 0.50 (31%) 0.13 碰撞
下载: 导出CSV
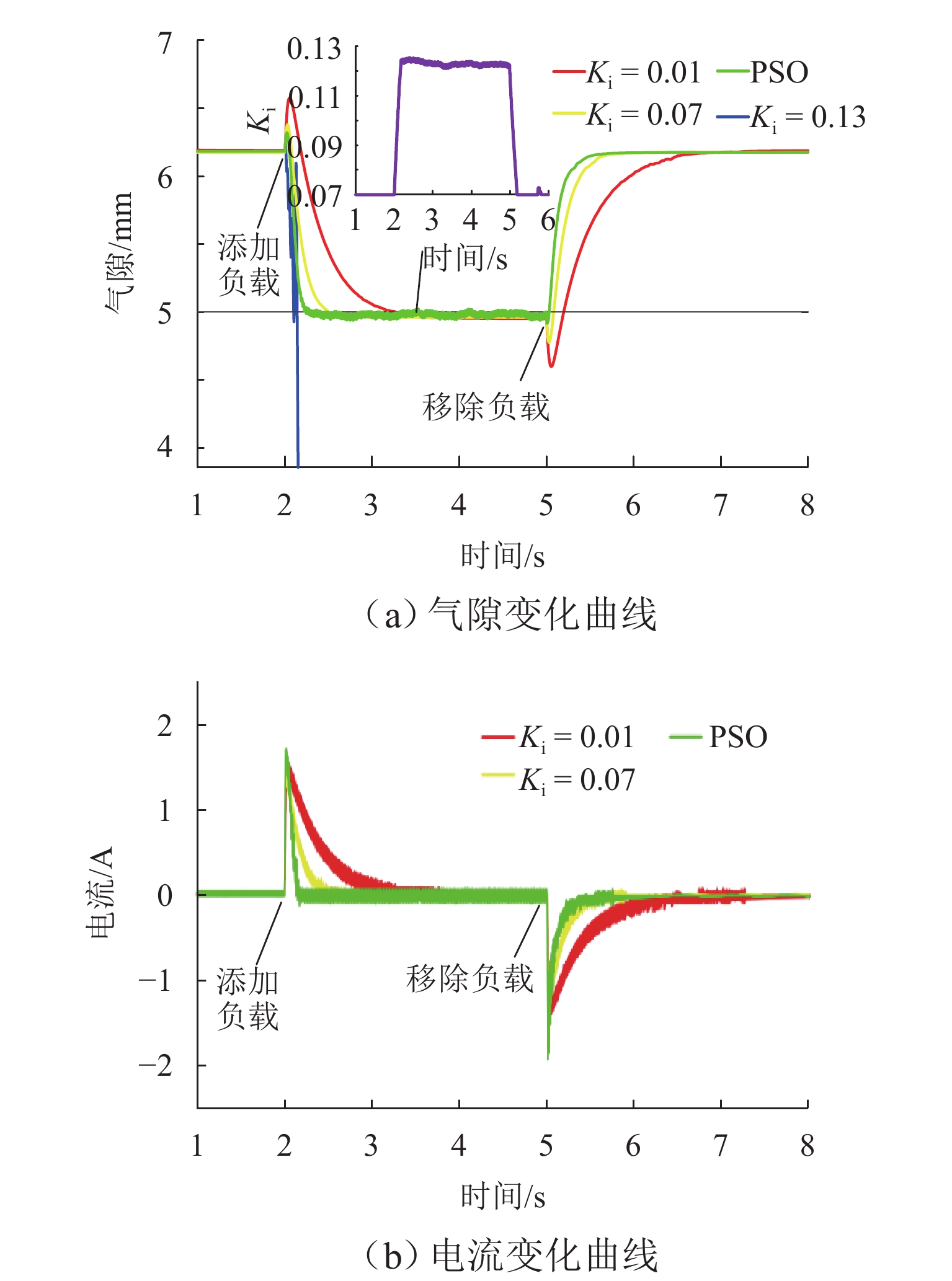
表 3 实验工况1的气隙超调和收敛时间
Table 3. Airgap overshoot and convergence time of experiment condition 1
Ki 加载 减载 超调/mm 收敛时间/s 超调/mm 收敛时间/s 0.01 1.13 (100%) 2.15 (100%) 0.81 (100%) 1.65 (100%) 0.07 0.66 (58%) 1.37 (63%) 0.53 (65%) 1.25 (75%) PSO 0.28 (25%) 0.67 (31%) 0.19 (23%) 0.67 (40%) 0.13 碰撞
下载: 导出CSV
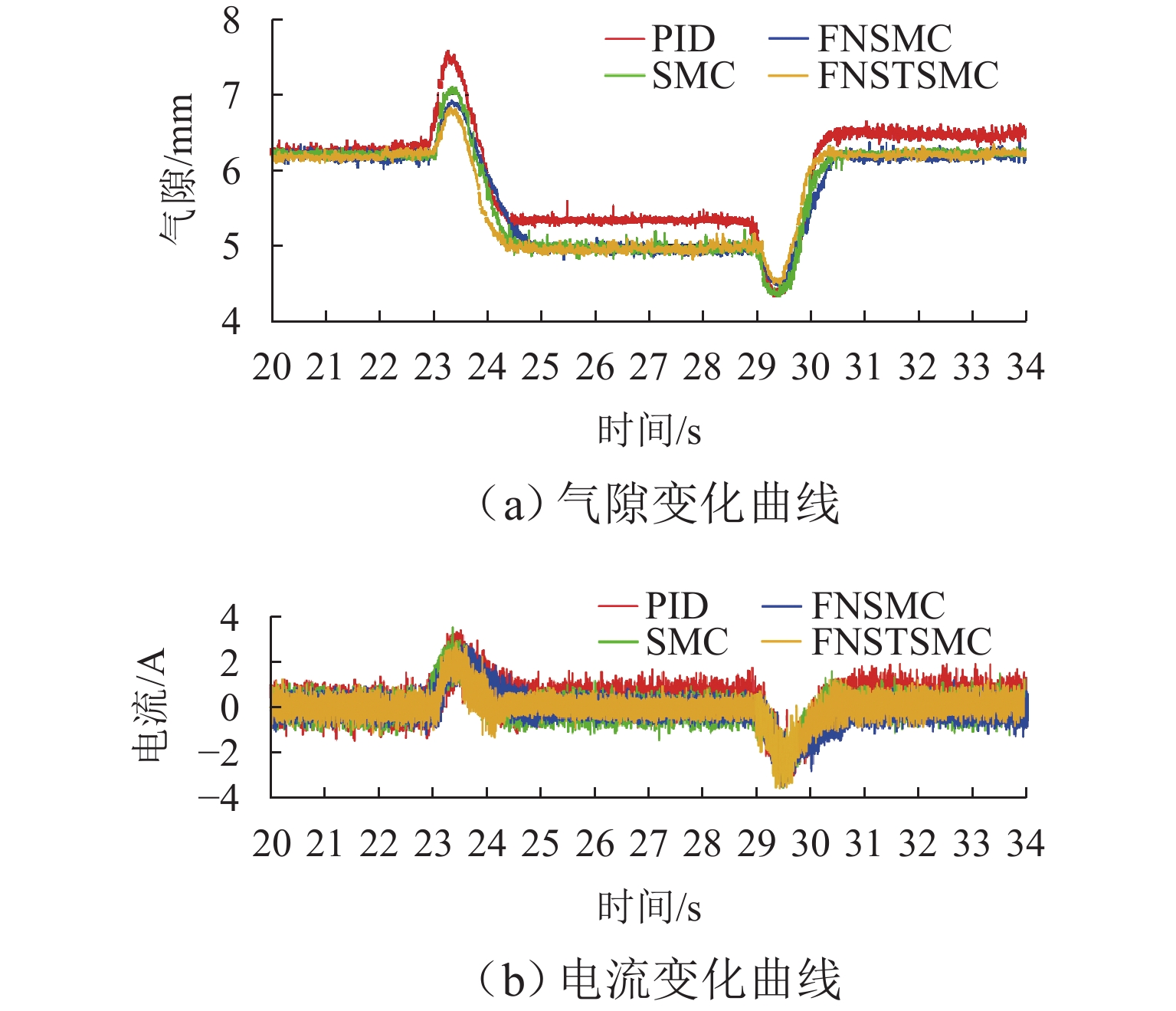
表 4 实验工况2的气隙超调和收敛时间
Table 4. Airgap overshoot and convergence time of experiment condition 2
策略 加载 减载 超调/mm 收敛时间/s 超调/mm 收敛时间/s PID 1.32 (100%) 1.64 (92%) 1.18 (100%) 1.57 (100%) SMC 0.92 (69%) 1.53 (86%) 0.71 (60%) 1.45 (92%) FNSMC 0.77 (58%) 1.78 (100%) 0.54 (46%) 1.55 (98%) FNSTSMC 0.66 (50%) 1.37 (77%) 0.53 (45%) 1.25 (79%)
下载: 导出CSV
-
[1] 邓自刚, 刘宗鑫, 李海涛, 等. 磁悬浮列车发展现状与展望[J]. 西南交通大学学报, 2022, 57(3): 455-474, 530.Deng Zigang, Liu Zongxin, Li Haitao, et al. Development status and prospect of maglev train[J]. Journal of Southwest Jiaotong University, 2022, 57(3): 455-474, 530. [2] 《西南交通大学学报》编辑部. “磁悬浮技术应用” 专刊概述[J]. 西南交通大学学报, 2025, 60(4): 封2. [3] 熊嘉阳, 沈志云, 池茂儒, 等. 高速磁悬浮列车技术综述[J]. 交通运输工程学报, 2025, 25(2): 1-23. doi: 10.19818/j.cnki.1671-1637.2025.02.001Xiong Jiayang, Shen Zhiyun, Chi Maoru, et al. Review on high-speed maglev train technology[J]. Journal of Traffic and Transportation Engineering, 2025, 25(2): 1-23. doi: 10.19818/j.cnki.1671-1637.2025.02.001 [4] Wang A X, Xu X G, Wang S Q, et al. Terminal sliding mode control for microgravity electromagnetic active vibration isolation system[C]//IECON 2023—49th Annual Conference of the IEEE Industrial Electronics Society. Piscataway: IEEE, 2023: 1-6. [5] Friedl B, Pechhacker A, Csencsics E, et al. Design and control of a table-top vibration isolation system with zero-power gravity compensation[C]//2024 IEEE International Conference on Advanced Intelligent Mechatronics (AIM). Piscataway: IEEE, 2024: 835-840. [6] 黎松奇, 罗成, 张昆仑. 基于漏磁补偿的混合电磁铁磁力修正研究[J]. 西南交通大学学报, 2022, 57(3): 604-609. doi: 10.3969/j.issn.0258-2724.20210843Li Songqi, Luo Cheng, Zhang Kunlun. Correction of magnetic force of hybrid electromagnet based on magnetic flux leakage compensation[J]. Journal of Southwest Jiaotong University, 2022, 57(3): 604-609. doi: 10.3969/j.issn.0258-2724.20210843 [7] Zhao C, Sun F, Jin J J, et al. Analysis of quasi-zero power characteristic for a permanent magnetic levitation system with a variable flux path control mechanism[J]. IEEE/ASME Transactions on Mechatronics, 2021, 26(1): 437-447. doi: 10.1109/tmech.2020.3026086 [8] Zhao C, Oka K, Sun F, et al. Design of zero-power control strategy with resisting tilt of hybrid magnetic levitation system[J]. IEEE Transactions on Industrial Electronics, 2022, 69(11): 11394-11402. doi: 10.1109/TIE.2021.3121670 [9] 孙凤, 裴文哲, 金俊杰, 等. 可变磁路式永磁悬浮平台的起浮控制方法[J]. 西南交通大学学报, 2022, 57(3): 531-539.Sun Feng, Pei Wenzhe, Jin Junjie, et al. Floating control method for permanent magnetic levitation platform with variable flux path[J]. Journal of Southwest Jiaotong University, 2022, 57(3): 531-539. [10] Tang X W, Hashimoto S, Kawaguchi T, et al. Zero-power control strategy and dynamics enhancement for hybrid maglev conveyor cart[J]. Electronics, 2024, 13(15): 2921. doi: 10.3390/electronics13152921 [11] Yalçın B C, Erkan K. 3-DoF zero power micro vibration isolation via linear matrix inequalities based on H∞ and H2 control approaches[J]. Mechanical Systems and Signal Processing, 2021, 153: 107506. doi: 10.1016/j.ymssp.2020.107506 [12] Hu L F, Fan K G, Wei L B, et al. Design of nonlinear active disturbance rejection controller based on the adaptive particle swarm optimization algorithm for the maglev train traction control system[J]. Journal of Sensors, 2023, 2023: 6627429. doi: 10.1155/2023/6627429 [13] 王玉蓉, 屈薇薇, 李桂琳, 等. 一种基于多目标粒子群算法的太赫兹超材料吸收器快速优化方法[J]. 物理学报, 2025, 74(5): 203-212.Wang Yurong, Qu Weiwei, Li Guilin, et al. An optimization method for terahertz metamaterial absorber based on multi-objective particle swarm optimization[J]. Acta Physica Sinica, 2025, 74(5): 203-212. [14] 杨杰, 陈昱圻, 王盼盼. 基于改进粒子群算法的列车速度跟踪自抗扰控制器设计[J]. 铁道学报, 2021, 43(7): 40-46.Yang Jie, Chen Yuqi, Wang Panpan. Design of active disturbance rejection controller for train speed tracking based on improved particle swarm optimization[J]. Journal of the China Railway Society, 2021, 43(7): 40-46. [15] Tzeng Y K, Wang T C. Optimal design of the electromagnetic levitation with permanent and electro magnets[J]. IEEE Transactions on Magnetics, 1994, 30(6): 4731-4733. doi: 10.1109/20.334204 [16] 陈慧星, 郝阿明, 程虎. 基于Kalman的电-永磁混合磁悬浮系统过流检测[J]. 兵工自动化, 2007, 26(8): 61-62. doi: 10.3969/j.issn.1006-1576.2007.08.031Chen Huixing, Hao Aming, Cheng Hu. Current detection for electricity-permanent magnetism mixed suspending system based on Kalman[J]. Ordnance Industry Automation, 2007, 26(8): 61-62. doi: 10.3969/j.issn.1006-1576.2007.08.031 [17] 张晓友, 尚利冬, 赵川, 等. 混合磁悬浮平台的零功率特性分析[J]. 机械工程与自动化, 2023, 52(6): 40-42, 45.Zhang Xiaoyou, Shang Lidong, Zhao Chuan, et al. Zero power characteristic analysis of hybrid magnetic levitation platform[J]. Mechanical Engineering & Automation, 2023, 52(6): 40-42, 45. [18] Zhang T B, Jiang S H, Shen D, et al. Adaptive finite-time fuzzy control for hybrid levitation system of maglev trains with active anti-lock constraints[J]. Journal of the Franklin Institute, 2023, 360(4): 2635-2659. doi: 10.1016/j.jfranklin.2023.01.006 [19] Sun F, Pei W Z, Zhao C, et al. Permanent maglev platform using a variable flux path mechanism: stable levitation and motion control[J]. IEEE Transactions on Magnetics, 2022, 58(7): 8300410. [20] Zhang T B, Jiang S H, Shen D. Collaborative control of a levitation module for maglev trains with physical contact prevention and user-defined convergence time[J]. International Journal of Systems Science, 2024, 55(2): 355-369. doi: 10.1080/00207721.2023.2272218 [21] Long Z Q, Wang Z Q, Zhai M D, et al. Fault tolerant control of high-speed PEM hybrid levitation system[M]//High-speed maglev train’s levitation and guidance control: the key technologies. Singapore: Springer, 2024: 225-250. [22] 赵川, 孙凤, 金俊杰, 等. 混合磁悬浮系统零功率抗偏载控制方法研究[J]. 机械工程学报, 2024, 60(8): 360-369. doi: 10.3901/JME.2024.08.360Zhao Chuan, Sun Feng, Jin Junjie, et al. Research on zero power and resisting eccentric load control method of hybrid magnetic levitation system[J]. Journal of Mechanical Engineering, 2024, 60(8): 360-369. doi: 10.3901/JME.2024.08.360 [23] Sun Y G, Xu J Q, Wu H, et al. Deep learning based semi-supervised control for vertical security of maglev vehicle with guaranteed bounded airgap[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(7): 4431-4442. doi: 10.1109/TITS.2020.3045319 [24] Sun Y G, Xu J Q, Qiang H Y, et al. Adaptive sliding mode control of maglev system based on RBF neural network minimum parameter learning method[J]. Measurement, 2019, 141: 217-226. doi: 10.1016/j.measurement.2019.03.006 [25] Bhat S P, Bernstein D S. Finite-time stability of continuous autonomous systems[J]. SIAM Journal on Control and Optimization, 2000, 38(3): 751-766. doi: 10.1137/S0363012997321358 [26] Feng Y, Yu X H, Han F L. On nonsingular terminal sliding-mode control of nonlinear systems[J]. Automatica, 2013, 49(6): 1715-1722. doi: 10.1016/j.automatica.2013.01.051 -

 下载:
下载:

 点击查看大图
点击查看大图

计量
- 文章访问数: 40
- HTML全文浏览量: 35
- PDF下载量: 10
- 被引次数: 0