

Alignment Design and Parameter Influence Laws of Flexible-Bendable Normal-Conducting Maglev Turnouts
-
摘要:
为解决现有弹性可弯式常导高速磁浮道岔线形设计存在的约束考量不足、速度等级覆盖单一、参数影响机制不明等问题,首先,明确线形设计的多维度约束条件,提出融合标准定子单元长度约束、车辆构造限制及衔接匹配要求的“缓和曲线-圆曲线-缓和曲线”线形设计方法;其次,建立不同长度道岔梁有限元分析模型,通过非线性回归拟合量化梁长与结构应力映射关系,确定道岔最小理论长度;然后,开展不同侧向通过速度的道岔线形设计,获取各速度等级线形参数;最后,分析侧向通过速度和加速度对线形参数的影响规律. 研究结果表明:梁体最大应力随长度增加非线性递减,90.00 m后长度对受力影响显著减弱,考虑1.3倍安全系数,确定弹性可弯式道岔最小理论长度为56.76 m;侧向通过速度不超过50 km/h或道岔型号小于7.500# 时,建议采用单圆型线形;“缓-圆-缓”线形尤其适用于70 km/h以上中高速场景;侧向通过速度不超过80 km/h时,以车辆构造半径约束为主导,呈现“短缓和、小半径、长圆曲、小号码”特征;速度超过100 km/h,以平衡离心力为核心,形成“长缓和、大半径、短圆曲、大号码”结构,圆曲线占比大幅下降,缓和曲线逐步成为主导段;侧向加速度增大时,缓和曲线长度递增,圆曲线半径、圆缓比及道岔全长递减,加速度超过1.000 m/s2后,线形参数变化逐渐趋于平缓.
Abstract:To address deficiencies of insufficient constraint consideration, single speed grade coverage, and unclear parameter influence mechanism in existing alignment design of flexible-bendable normal-conducting high-speed maglev turnouts, multi-dimensional constraint conditions for alignment design were clarified, and a “transition curve, circular curve, and transition curve” alignment design method integrating standard stator unit length constraints, vehicle construction constraints, and interface matching requirements was proposed. Finite element analysis models of turnout beams with different lengths were established. The mapping relationship between beam length and structural stress was quantified via nonlinear regression fitting, and the minimum theoretical turnout length was determined. Alignment designs for turnouts with different lateral passing speeds were performed to obtain alignment parameters for each speed grade. The influence laws of lateral passing speed and acceleration on alignment parameters were analyzed. Results show that maximum beam stress decreases nonlinearly with increasing length, and the length effect on stress weakens significantly beyond 90.00 m. With a safety factor of 1.3, the minimum theoretical length of the flexible-bendable turnout is 56.76 m. When lateral passing speed does not exceed 50 km/h, or the turnout number is less than 7.500#, a single circular alignment is recommended. The “transition, circular, and transition” alignment is particularly suitable for medium-to-high-speed scenarios above 70 km/h. When lateral passing speed does not exceed 80 km/h, vehicle construction radius constraint is dominant, exhibiting “short transition, small radius, long circular curve, and small turnout number” characteristics. When speed exceeds 100 km/h, centrifugal force balancing is the core requirement, forming a structure with “long transition, large radius, short circular curve, and large turnout number” characteristics, with circular curve proportion decreasing significantly and transition curve gradually becoming dominant. With increasing lateral acceleration, transition curve length increases, while circular curve radius, circular-transition ratio, and total turnout length decrease. When acceleration exceeds 1.000 m/s2, turnout alignment parameter changes tend to be gradual.
-
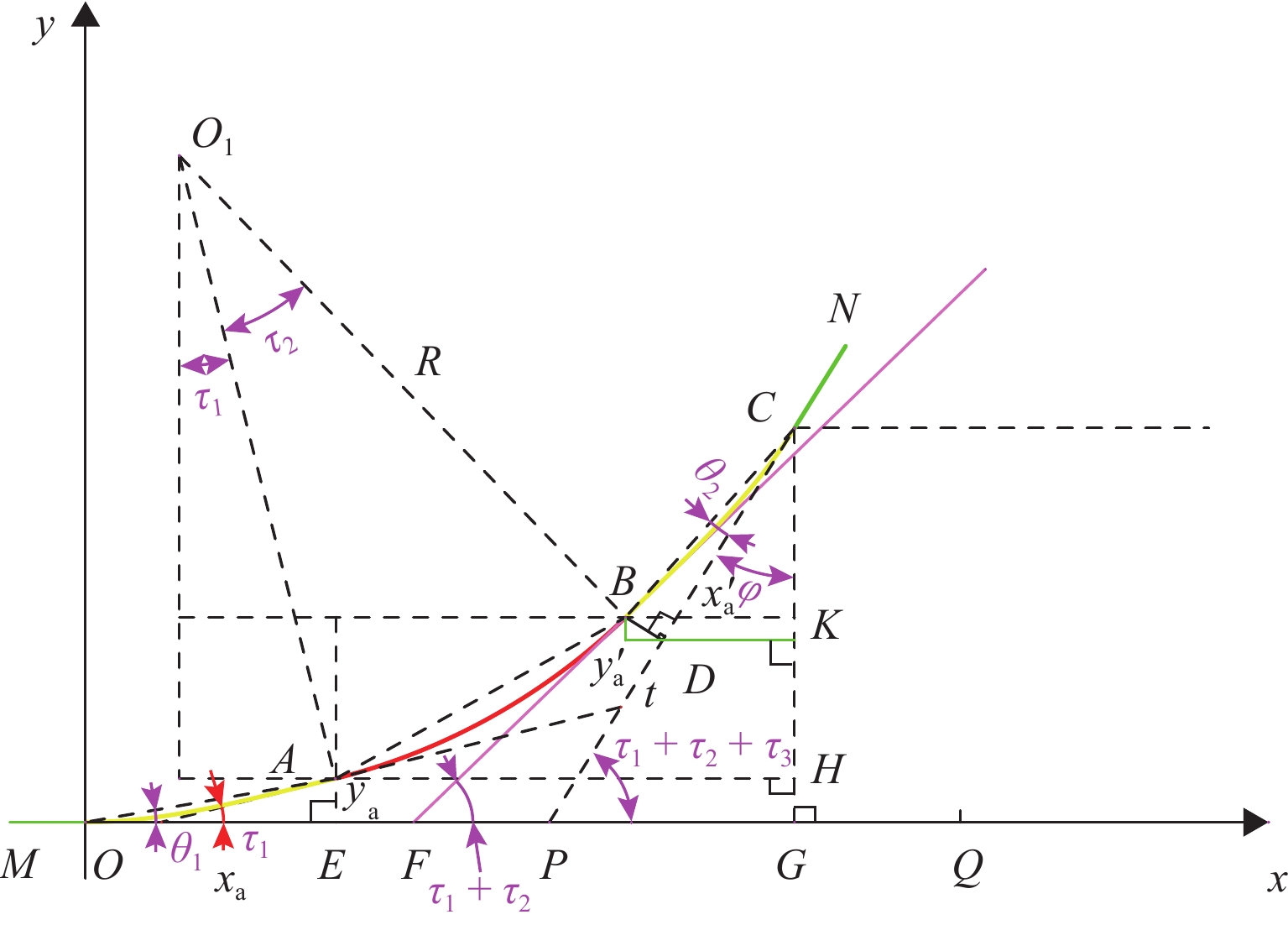
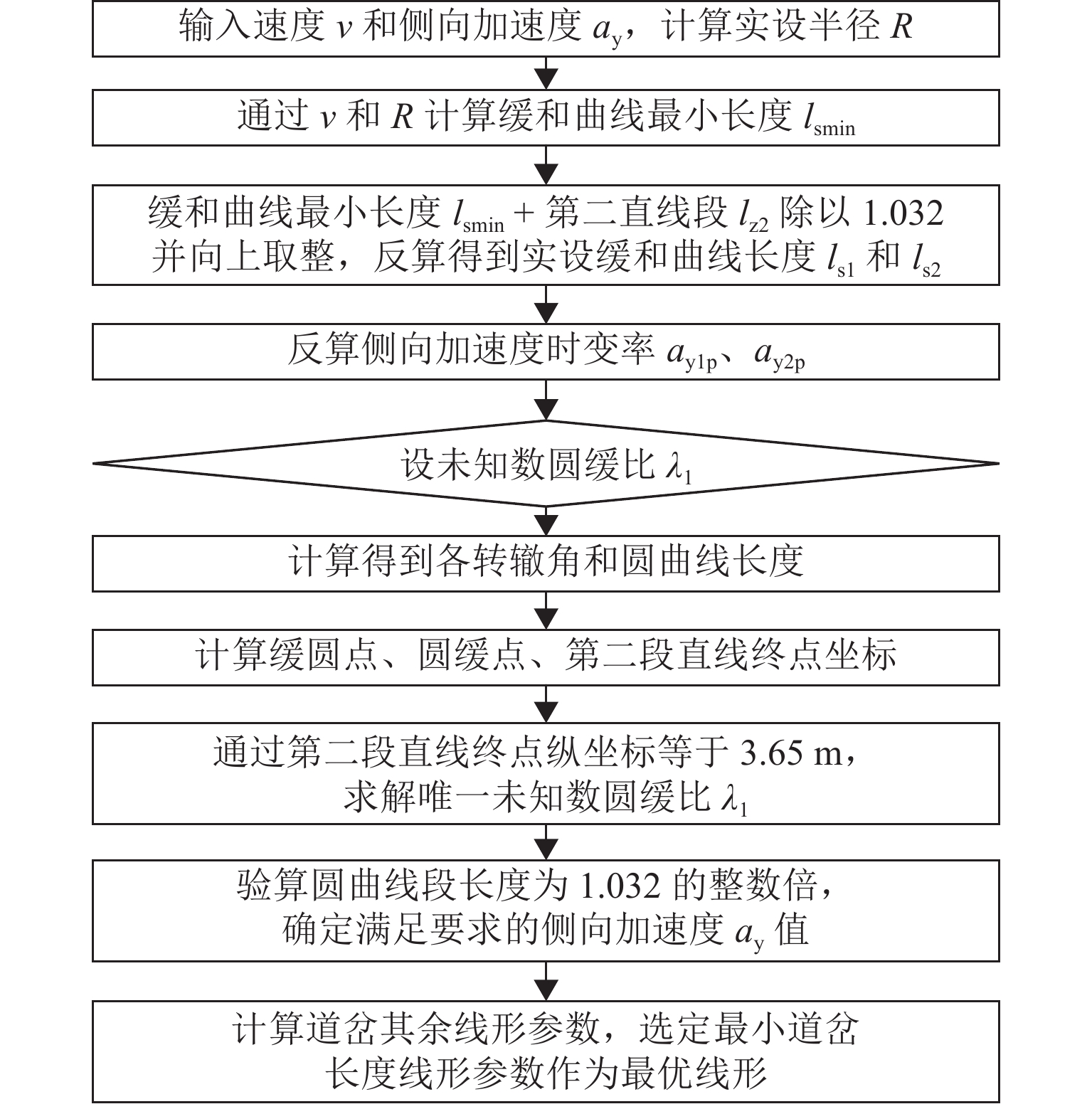
图 1 道岔线形几何关系计算示意
Figure 1. Schematic of geometric relationship calculation for turnout alignment
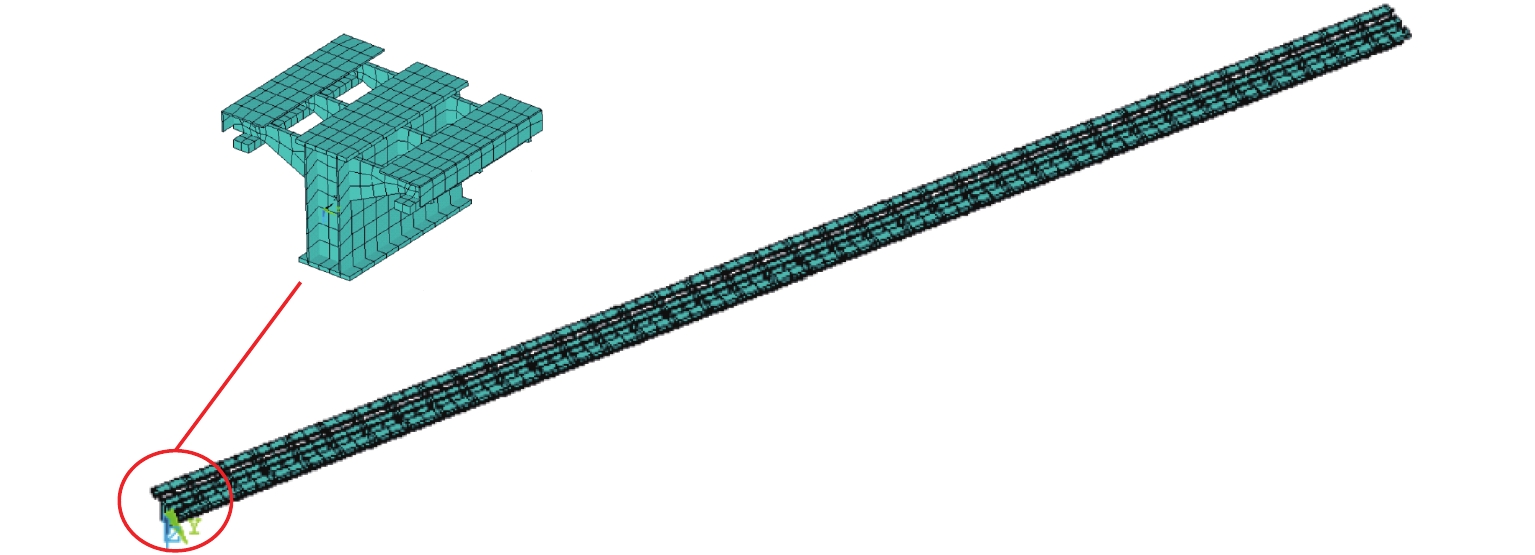
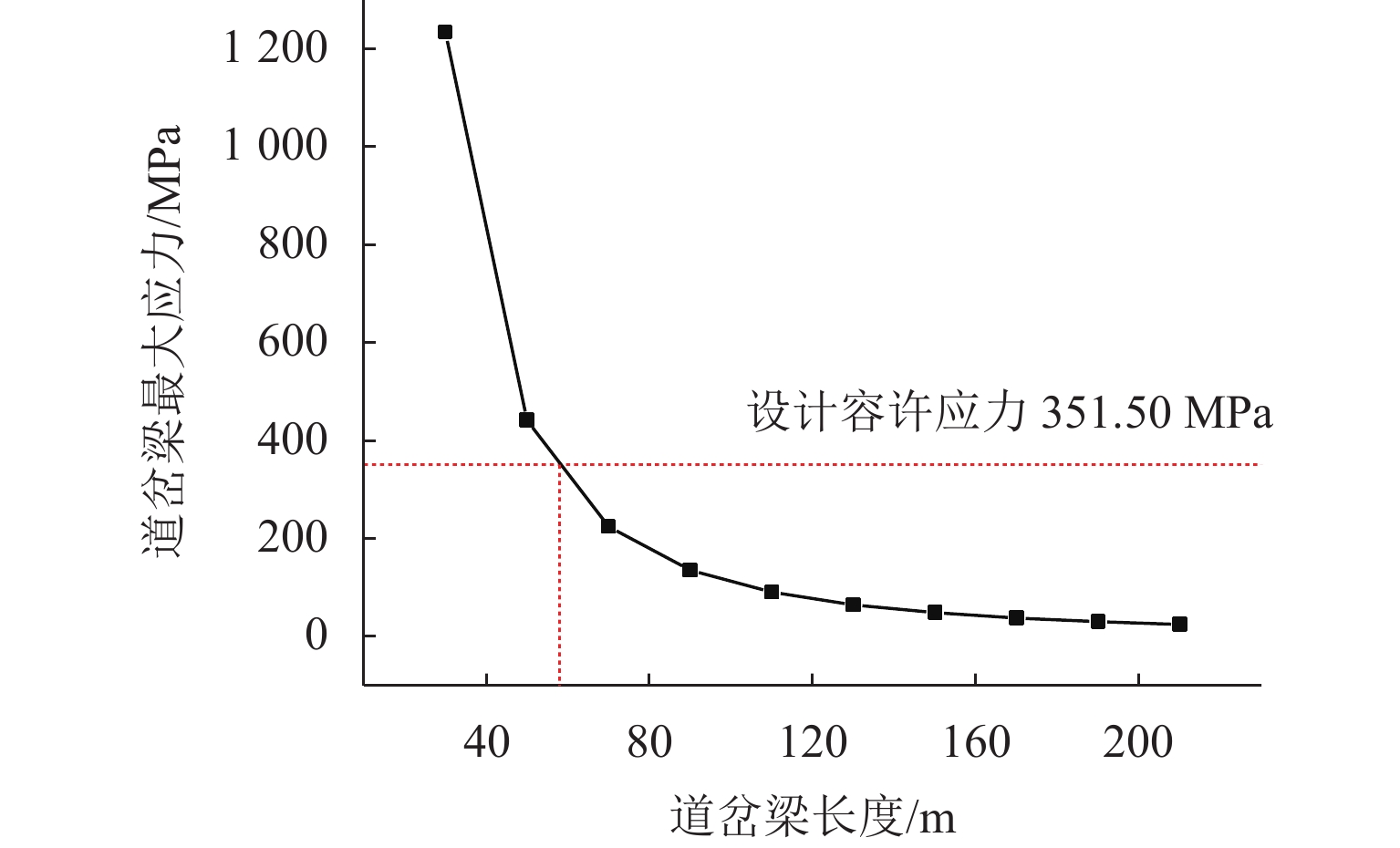
图 3 弹性可弯式道岔梁有限元分析模型
Figure 3. Finite element analysis model of flexible-bendable turnout beam

图 5 侧向通过速度40 km/h道岔线形设计参数
Figure 5. Turnout alignment design parameters at lateral passing speed of 40 km/h

图 7 曲线结构参数与速度的变化规律
Figure 7. Variation laws of curve’s structural parameters with speed
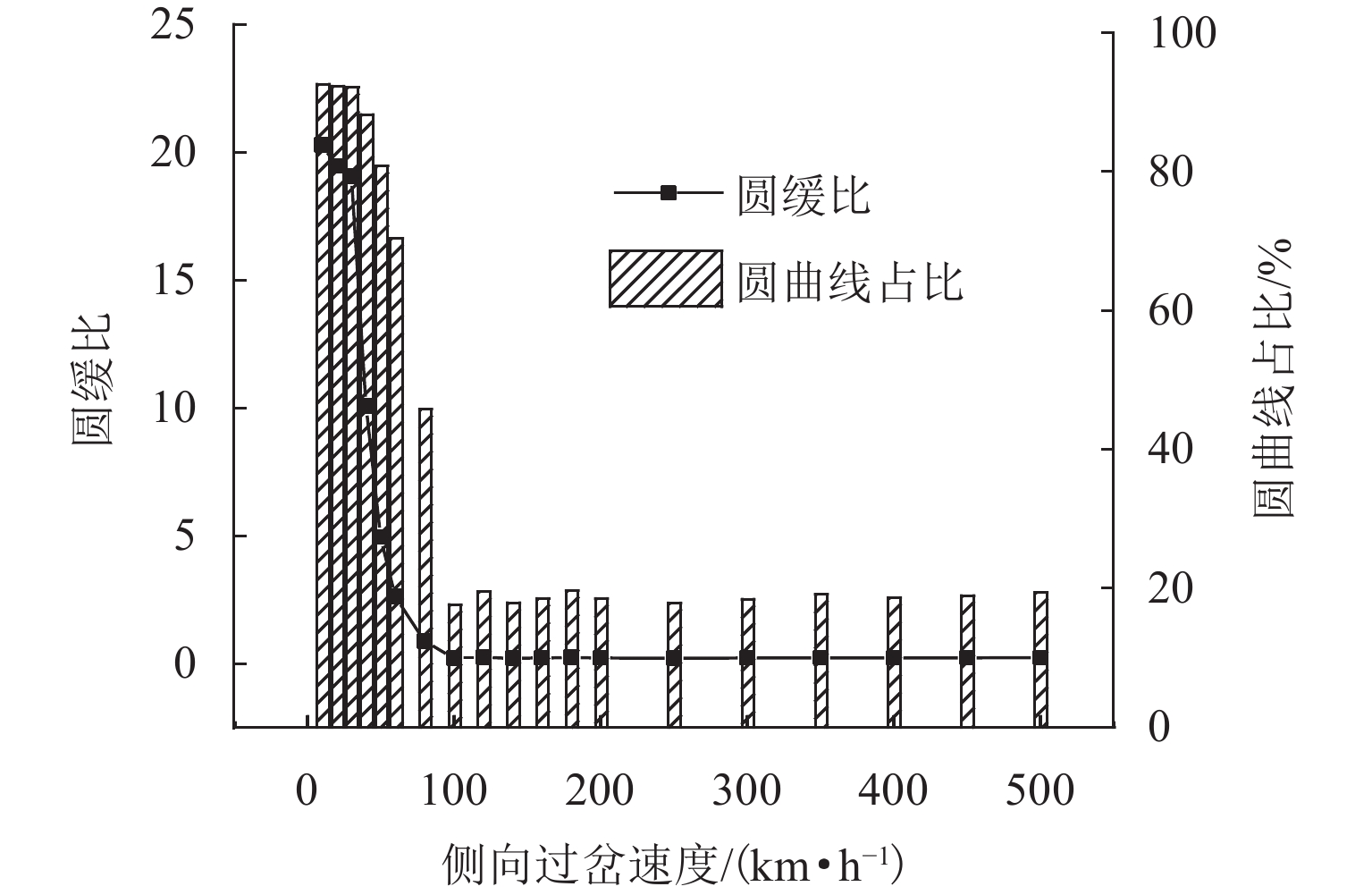
图 8 圆缓比及圆曲线占比随速度变化曲线
Figure 8. Variation curve of circular-transition ratio and circular curve proportion with speed
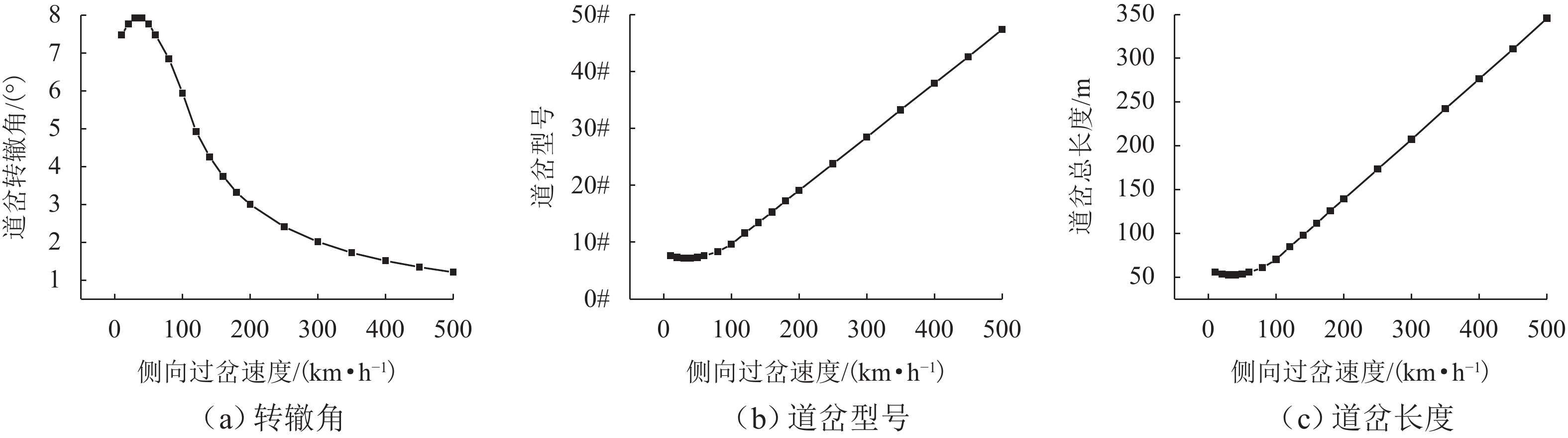
图 9 道岔整体尺寸与型号随速度的变化规律
Figure 9. Variation laws of overall turnout dimensions and model with speed
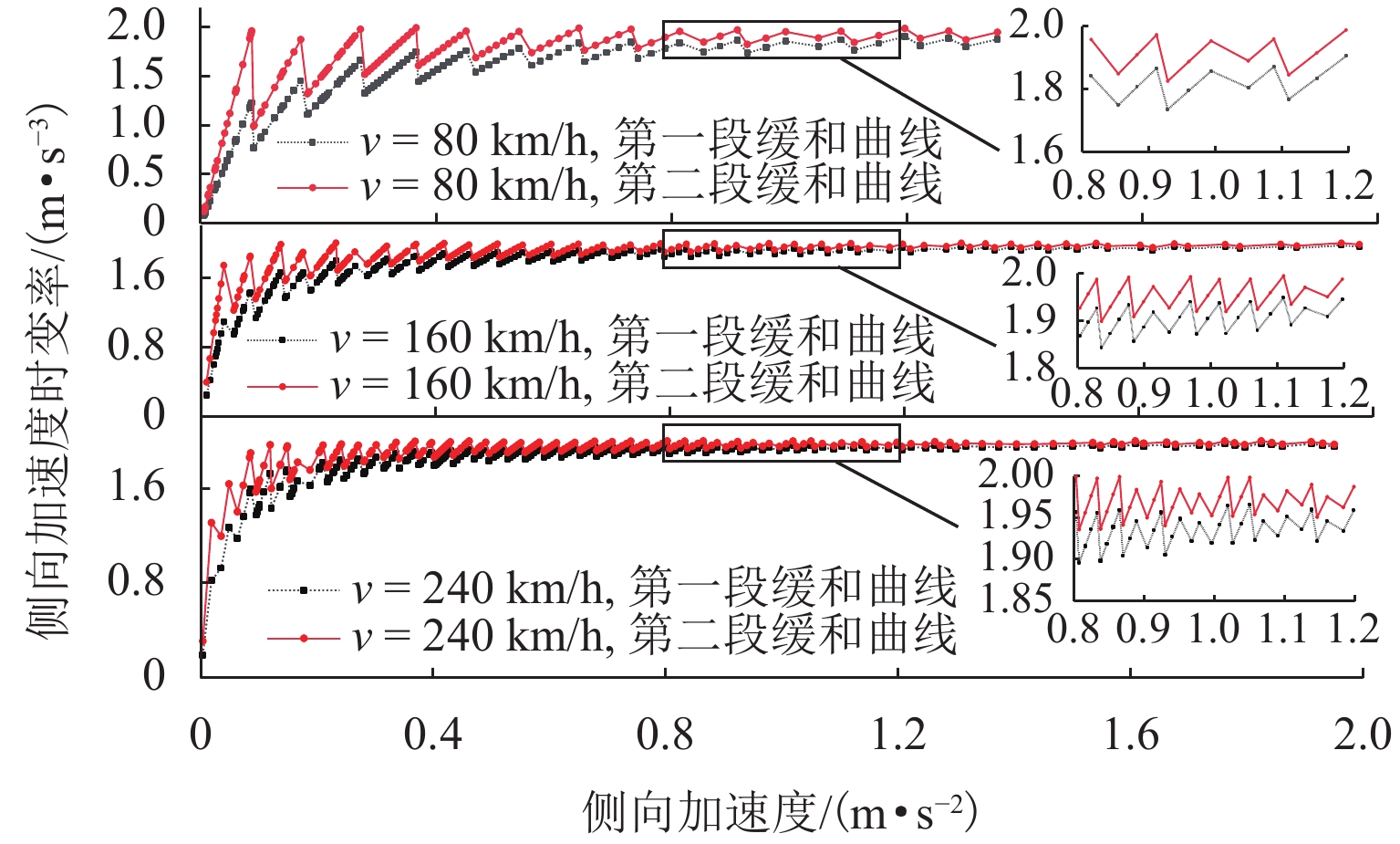
图 10 侧向加速度时变率随加速度的变化曲线
Figure 10. Variation curves of lateral acceleration time rate with acceleration

图 11 曲线结构参数随加速度的变化曲线
Figure 11. Variation curves of curve’s structural parameters with acceleration

图 12 圆缓比及圆曲线占比随加速度的变化曲线
Figure 12. Variation curves of circular-transition ratio and circular curve proportion with acceleration
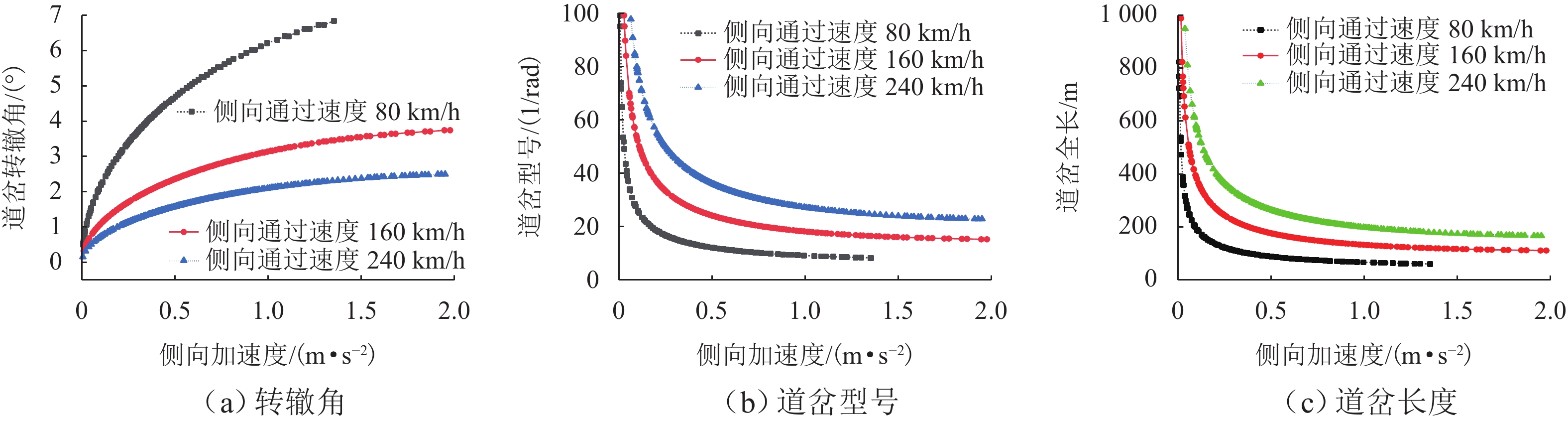
图 13 道岔整体尺寸与型号随加速度的变化曲线
Figure 13. Variation curves of overall turnout dimensions and model with acceleration
表 1 不同侧向通过速度道岔线形参数
Table 1. Turnout alignment parameters at different lateral passing speeds
侧向过岔速度 v/(km·h−1) 侧向加速度 ay/(m·s−2) 侧向加速度时变率 ay1p,ay2p/(m·s−3) 缓和曲线长度
ls1,ls2/m圆曲线半
径 R/m圆曲线
长度 ly/m道岔转辙
角 τ/(°)道岔
型号道岔长
度 L/m10 0.019 0.034,0.054 1.564,0.980 405.148 51.600 7.477 7.619 55.728 20 0.082 0.292,0.467 1.564,0.980 374.943 49.536 7.764 7.334 53.664 30 0.193 1.027,1.639 1.564,0.980 360.279 48.504 7.916 7.192 52.632 40 0.350 1.498,1.932 2.596,2.012 352.811 46.440 7.916 7.192 52.632 50 0.548 1.633,1.867 4.660,4.076 352.108 43.344 7.764 7.335 53.664 60 0.777 1.669,1.804 7.756,7.172 357.732 39.216 7.477 7.620 55.728 80 1.353 1.878,1.949 16.012,15.428 364.937 27.864 6.843 8.333 60.888 100 1.975 1.932,1.972 28.396,27.812 390.753 12.384 5.937 9.617 70.176 120 1.919 1.906,1.940 33.556,32.972 578.988 16.512 4.926 11.603 84.624 160 1.977 1.957,1.983 44.908,44.324 999.066 20.640 3.742 15.288 111.456 200 1.973 1.949,1.969 56.260,55.676 1564.089 25.800 2.995 19.111 139.320 300 1.999 1.981,1.995 84.124,83.540 3472.660 38.184 2.013 28.449 207.432 400 1.993 1.977,1.988 111.988,111.404 6194.368 51.600 1.510 37.925 276.576  下载: 导出CSV
下载: 导出CSV
表 2 单圆形道岔与缓-圆-缓型道岔线形参数对比
Table 2. Comparison of alignment parameters between single circular turnout and transition, circular, and transition turnout
侧向过岔速度 v/(km·h−1) 道岔线形 侧向加速度 ay/(m·s−2) 侧向加速度时变率 ay1p, ay2p/(m·s−3) 缓和曲线长度 ls1、ls2/m 圆曲线半
径 R/m圆曲线长
度 ly/m道岔转辙角 τ/(°) 道岔
型号道岔长
度 L/m20 缓-圆-缓 0.082 0.292,0.467 1.564,0.980 374.943 49.536 7.764 7.334# 53.664 单圆形 0.085 364.124 51.600 8.119 7.010# 51.600 30 缓-圆-缓 0.193 1.027,1.639 1.564,0.980 360.279 48.504 7.916 7.192# 52.632 单圆形 0.191 364.123 51.600 8.119 7.010# 51.600 40 缓-圆-缓 0.350 1.498,1.932 2.596,2.012 352.811 46.440 7.916 7.192# 52.632 单圆形 0.339 364.124 51.600 8.119 7.010# 51.600 50 缓-圆-缓 0.548 1.633,1.867 4.660,4.076 352.108 43.344 7.764 7.335# 53.664 单圆形 0.530 364.123 51.600 8.119 7.010# 51.600
下载: 导出CSV
-
[1] 翟婉明, 赵春发. 现代轨道交通工程科技前沿与挑战[J]. 西南交通大学学报, 2016, 51(2): 209-226. doi: 10.3969/j.issn.0258-2724.2016.02.001Zhai Wanming, Zhao Chunfa. Frontiers and challenges of sciences and technologies in modern railway engineering[J]. Journal of Southwest Jiaotong University, 2016, 51(2): 209-226. doi: 10.3969/j.issn.0258-2724.2016.02.001 [2] 梁建英. 中国高速磁浮交通系统发展现状与展望[J]. 科学, 2022, 74(5): 31-36, 269. doi: 10.3969/j.issn.0368-6396.2022.05.009Liang Jianying. Development status and future prospects of the high-speed maglev transportation system in China[J]. Science, 2022, 74(5): 31-36, 269. doi: 10.3969/j.issn.0368-6396.2022.05.009 [3] 丁叁叁. 时速600公里高速磁浮交通系统[M]. 上海: 上海科学技术出版社, 2022. [4] 曾国锋, 朱志伟, 吕卿. 常导高速磁浮系统道岔研究进展[J]. 中国铁道科学, 2025, 46(5): 66-79. doi: 10.3969/j.issn.1001-4632.2025.05.06Zeng Guofeng, Zhu Zhiwei, Lü Qing. Research progress on the guideway switch of high-speed EMS maglev system[J]. China Railway Science, 2025, 46(5): 66-79. doi: 10.3969/j.issn.1001-4632.2025.05.06 [5] 邓自刚, 刘宗鑫, 李海涛, 等. 磁悬浮列车发展现状与展望[J]. 西南交通大学学报, 2022, 57(3): 455-474, 530. doi: 10.3969/j.issn.0258-2724.20220001Deng Zigang, Liu Zongxin, Li Haitao, et al. Development status and prospect of maglev train[J]. Journal of Southwest Jiaotong University, 2022, 57(3): 455-474, 530. doi: 10.3969/j.issn.0258-2724.20220001 [6] Mao J F, Li D H, Yu Z W, et al. A novel refined dynamic model of high-speed maglev train-bridge coupled system for random vibration and running safety assessment[J]. Journal of Central South University, 2024, 31(7): 2532-2544. doi: 10.1007/s11771-024-5671-y [7] 顾行涛, 赵春发, 翟婉明. 磁浮道岔梁自振特性及瞬态响应分析[J]. 交通运输工程与信息学报, 2009, 7(4): 56-62. doi: 10.3969/j.issn.1672-4747.2009.04.010Gu Xingtao, Zhao Chunfa, Zhai Wanming. Natural vibration and transient response of maglev switch beam[J]. Journal of Transportation Engineering and Information, 2009, 7(4): 56-62. doi: 10.3969/j.issn.1672-4747.2009.04.010 [8] Zhao C F, Zhai W M. Maglev vehicle/guideway vertical random response and ride quality[J]. Vehicle System Dynamics, 2002, 38(3): 185-210. doi: 10.1076/vesd.38.3.185.8289 [9] 曾国锋, 韩紫平, 刘鸣博, 等. 电磁悬浮型高速磁浮车-岔垂向动力响应[J]. 同济大学学报(自然科学版), 2023, 51(3): 303-313.Zeng Guofeng, Han Ziping, Liu Mingbo, et al. Vertical dynamic response of electromagnetic suspension highspeed maglev vehicle-turnout[J]. Journal of Tongji University (Natural Science), 2023, 51(3): 303-313. [10] 殷月俊, 罗汉中, 黄醒春. 高速磁浮道岔振动响应的原位实测[J]. 上海交通大学学报, 2007, 41(4): 658-663. doi: 10.3321/j.issn:1006-2467.2007.04.032Yin Yuejun, Luo Hanzhong, Huang Xingchun. In-situ research of dynamic response of maglev turnout[J]. Journal of Shanghai Jiao Tong University, 2007, 41(4): 658-663. doi: 10.3321/j.issn:1006-2467.2007.04.032 [11] 张宏君. 高速磁浮线路道岔钢梁移位过程及其数值分析[J]. 城市轨道交通研究, 2010, 13(7): 32-36. doi: 10.3969/j.issn.1007-869X.2010.07.010Zhang Hongjun. Shift process and numerical analysis of high speed maglev switch change[J]. Urban Mass Transit, 2010, 13(7): 32-36. doi: 10.3969/j.issn.1007-869X.2010.07.010 [12] 余锋, 李利军. 高速磁浮道岔结构选型研究与设计[J]. 铁道工程学报, 2025, 42(1): 37-41. doi: 10.3969/j.issn.1006-2106.2025.01.007Yu Feng, Li Lijun. Research and design of structure selection of high speed maglev turnout[J]. Journal of Railway Engineering Society, 2025, 42(1): 37-41. doi: 10.3969/j.issn.1006-2106.2025.01.007 [13] 高岩, 刘高志, 洪英杰, 等. 高速磁浮铁路线形设计方法研究综述[J]. 西南交通大学学报, 2026, 61(4): 1-19.Gao Yan, Liu Gaozhi, Hong Yingjie, et al. A review of alignment design methodology for high-speed maglev railways[J]. Journal of Southwest Jiaotong University, 2026, 61(4): 1-19. [14] 谢毅, 寇峻瑜, 余浩伟. 高速磁浮最小曲线半径及缓和曲线长度研究[J]. 铁道工程学报, 2020, 37(4): 43-48.Xie Yi, Kou Junyu, Yu Haowei. Research on the minimum plane curve radius and transition curve length of high-speed maglev[J]. Journal of Railway Engineering Society, 2020, 37(4): 43-48. [15] 彭也也, 宋欣悦, 赵春发, 等. 常导高速磁浮交通道岔的平面曲线线形及参数[J]. 西南交通大学学报, 2025, 60(4): 865-873.Peng Yeye, Song Xinyue, Zhao Chunfa, et al. Horizontal curve alignment and parameters of turnout for high-speed electromagnetic suspension maglev transit[J]. Journal of Southwest Jiaotong University, 2025, 60(4): 865-873. [16] 王健. 常导高速磁浮道岔平面线形设计研究[J]. 铁道工程学报, 2025, 42(10): 28-33.Wang Jian. Study on the planar alignment design of electromagnetic suspension(EMS) high-speed maglev turnouts[J]. Journal of Railway Engineering Society, 2025, 42(10): 28-33. [17] 邵壮, 张东风, 马佳骏. 磁悬浮轨道道岔线形设计及计算方法研究[J]. 铁道标准设计, 2025, 69(9): 31-38.Shao Zhuang, Zhang Dongfeng, Ma Jiajun. Research on design and calculation method of maglev track turnout alignment[J]. Railway Standard Design, 2025, 69(9): 31-38. [18] 潘欣嫄, 赵春发, 冯洋, 等. 超导电动悬浮交通道岔平面曲线参数设计研究 [J/OL]. 铁道标准设计, 2026-01-05. https://doi.org/10.13238/j.issn.1004-2954.202501030003. [19] CJJ/T 310—2021 高速磁浮交通设计标准: [S]. [20] 胡叙洪, 伍卫凡. 磁浮交通技术与发展[M]. 北京: 中国铁道出版社, 2021. [21] Zhu Z W, Ye F, Zeng G F, et al. Analysis of dynamic characteristics of elastic-bending turnout for maglev transportation[C]//CICTP 2018. Beijing: ASCE, 2018: 1102-1107. [22] 周丹峰, 朱鹏翔, 屈鸣鹤, 等. 桥梁参数对磁浮系统车-桥耦合稳定性的影响[J]. 西南交通大学学报, 2025, 60(4): 823-832.Zhou Danfeng, Zhu Pengxiang, Qu Minghe, et al. Influence of bridge parameters on vehicle-bridge coupling stability of maglev system[J]. Journal of Southwest Jiaotong University, 2025, 60(4): 823-832. [23] Feng Y, Zhao C F, Liang X, et al. Influence of bolster-hanger length on the dynamic performance of high-speed EMS maglev vehicles[J]. Vehicle System Dynamics, 2022, 60(11): 3743-3764. doi: 10.1080/00423114.2021.1973042 [24] 吕镇东, 杨志刚, 袁思齐, 等. 时速600 km高速磁浮列车天线气动声学影响研究[J]. 中南大学学报(自然科学版), 2023, 54(11): 4561-4572. doi: 10.11817/j.issn.1672-7207.2023.11.033Lü Zhendong, Yang Zhigang, Yuan Siqi, et al. Study on aeroacoustic effect of high speed maglev train antenna at 600 km/h[J]. Journal of Central South University (Science and Technology), 2023, 54(11): 4561-4572. doi: 10.11817/j.issn.1672-7207.2023.11.033 [25] 朱志伟, 曾国锋, 闵多, 等. 一种节段式磁浮道岔: 中国: 202511084384.4 [P]. 2025-09-26. [26] 吴祥明. 磁浮列车[M]. 上海: 上海科学技术出版社, 2003. [27] 王平, 陈嵘, 徐井芒, 等. 高速铁路道岔系统理论与工程实践研究综述[J]. 西南交通大学学报, 2016, 51(2): 357-372. doi: 10.3969/j.issn.0258-2724.2016.02.015Wang Ping, Chen Rong, Xu Jingmang, et al. Theories and engineering practices of high-speed railway turnout system: survey and review[J]. Journal of Southwest Jiaotong University, 2016, 51(2): 357-372. doi: 10.3969/j.issn.0258-2724.2016.02.015 [28] 何华武. 中国铁路高速道岔技术研究[J]. 中国工程科学, 2009, 11(5): 23-30. doi: 10.3969/j.issn.1009-1742.2009.05.003He Huawu. Technical studies on high-speed turnouts for China railways[J]. Engineering Sciences, 2009, 11(5): 23-30. doi: 10.3969/j.issn.1009-1742.2009.05.003 -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 57
- HTML全文浏览量: 54
- PDF下载量: 4
- 被引次数: 0