

Design Concept and Research Progress of Lunar Maglev Vehicle
-
摘要:
随着国际月球科研站建设进入工程实施阶段,月面基地与矿区之间的高效物流运输成为支撑月球资源开发的核心需求,而传统轮式月球车在低重力与松软月壤环境下面临严峻的技术瓶颈. 为探索突破轮式系统物理极限的新型月面运输方案,本文提出一种基于Halbach永磁轮的磁悬浮月球车概念,系统论证其技术可行性与环境适配性,并对国内外相关技术的发展历史做了简要回顾. 首先,从发展现状、环境约束、失效模式及性能瓶颈4个层面梳理轮式月球车技术的目前困境;其次,围绕非黏着驱动机制、低重力载重增益、原位资源路面建造及极低温电磁增效角度探究磁悬浮月球车与月球环境适配的四重优势,并与现有月球车技术进行对比分析;最后,综述团队在永磁轮电动悬浮车辆电磁建模、动力学分析、稳定控制及样机验证等方面的研究成果,还阐明了后续向月球环境移植的关键科学问题及未来研究展望. 传统轮式月球车的性能瓶颈源于接触式行走机构对月壤物理环境的依赖,NASA等机构已开展磁悬浮技术的地外应用探索;所提出的永磁轮磁悬浮月球车结构简单、环境适应性好,现已完成“电磁—动力学—控制—样机研制”的闭环研究;作为月面工程条件下的概念方案,其未来需重点突破真实环境模拟、高延迟自主通信调控及导体板路面原位制造等关键技术,为构建可靠的月面交通网络提供支撑.
-
关键词:
- 月球磁悬浮车辆 /
- 永磁电动悬浮 /
- Halbach永磁轮 /
- 月球资源开发 /
- 磁悬浮交通
Abstract:As the construction of the international lunar research station enters the engineering implementation phase, efficient logistics transportation between lunar bases and mining areas becomes a core requirement to support lunar resource exploitation, while conventional wheeled lunar rovers face severe technical bottlenecks in low-gravity and soft lunar soil environments. To explore a novel lunar transportation scheme that breaks through the physical limits of wheeled systems, a maglev lunar rover concept based on Halbach permanent-magnet wheels was proposed; its technical feasibility and environmental adaptability were systematically demonstrated, and a brief review of the development history of related Chinese and international technologies was provided. First, the current dilemmas of wheeled lunar rover technology were sorted out from four aspects: development status, environmental constraints, failure modes, and performance bottlenecks. Second, the quadruple advantages of the adaptability of the maglev lunar rover to the lunar environment were explored from the perspectives of a non-adhesive driving mechanism, low-gravity load gain, in-situ resource pavement construction, and ultra-low-temperature electromagnetic enhancement, and a comparative analysis with existing lunar rover technologies was conducted. Finally, the research achievements of the team in electromagnetic modeling, dynamics analysis, stability control, and prototype verification of permanent-magnet wheel electrodynamic suspension vehicles were reviewed, and the key scientific issues and future research prospects for subsequent transplantation to the lunar environment were elucidated. The research results show that the performance bottleneck of conventional wheeled lunar rovers originates from the dependence of contact-type walking mechanisms on the physical environment of lunar soil, and institutions such as NASA have carried out exploration on the extraterrestrial application of maglev technology. The proposed permanent-magnet wheel maglev lunar rover features a simple structure and good environmental adaptability, and a closed-loop research of “electromagnetics-dynamics-control-prototype development” has been completed. As a conceptual scheme under lunar engineering conditions, key technologies including real environment simulation, high-latency autonomous communication regulation, and in-situ manufacturing of conductor-plate pavement need to be predominantly broken through in the future, so as to provide support for the construction of a reliable lunar transportation network.
-
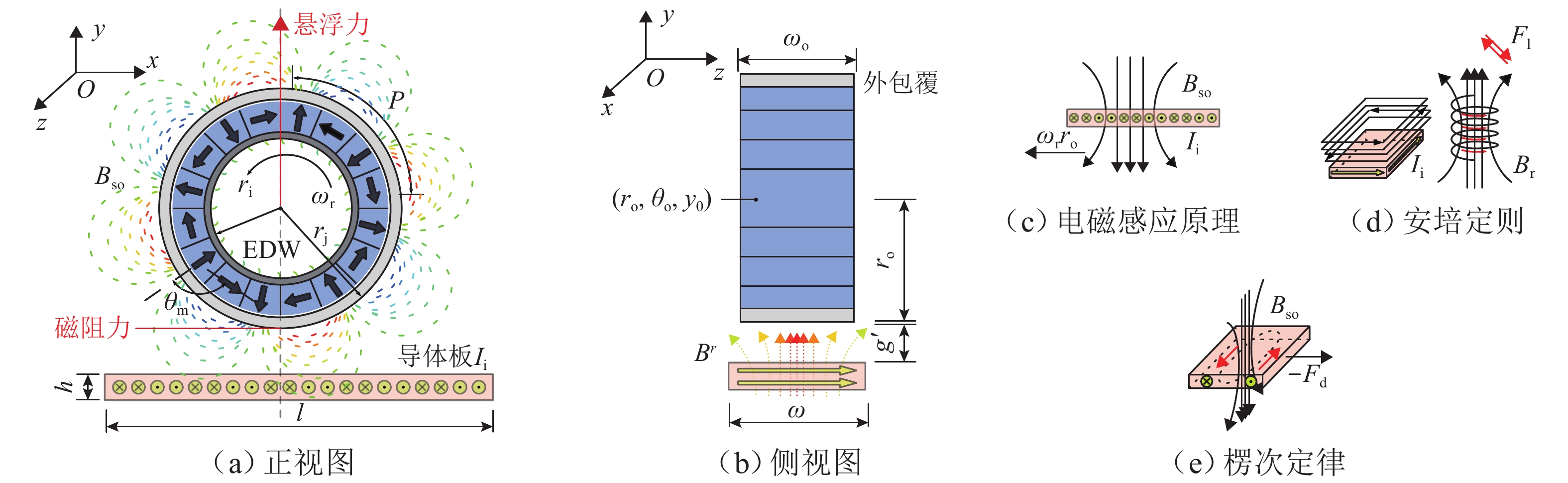
图 6 月表磁悬浮车辆电磁力原理
Figure 6. Schematic of electromagnetic force principle for lunar surface maglev vehicle
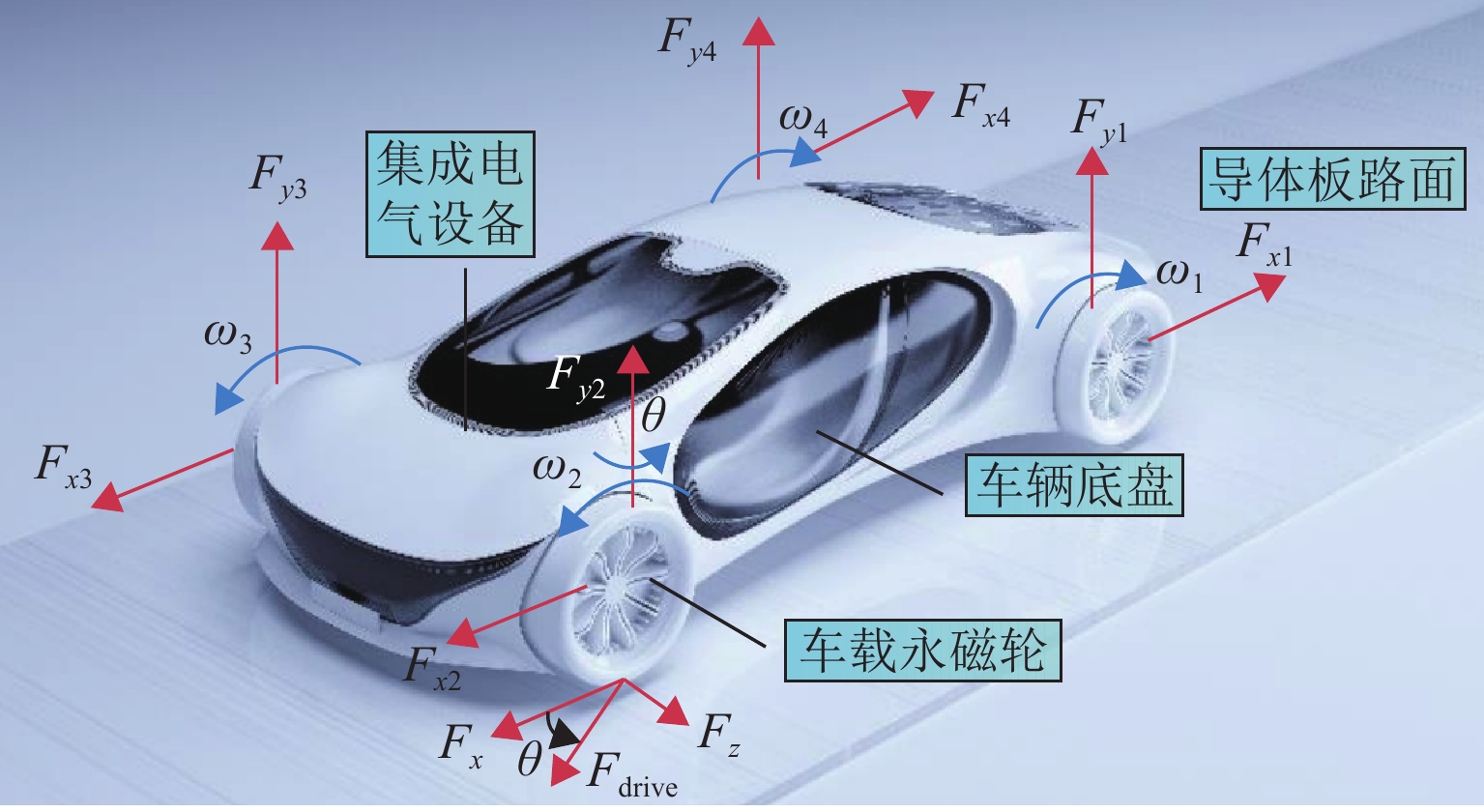
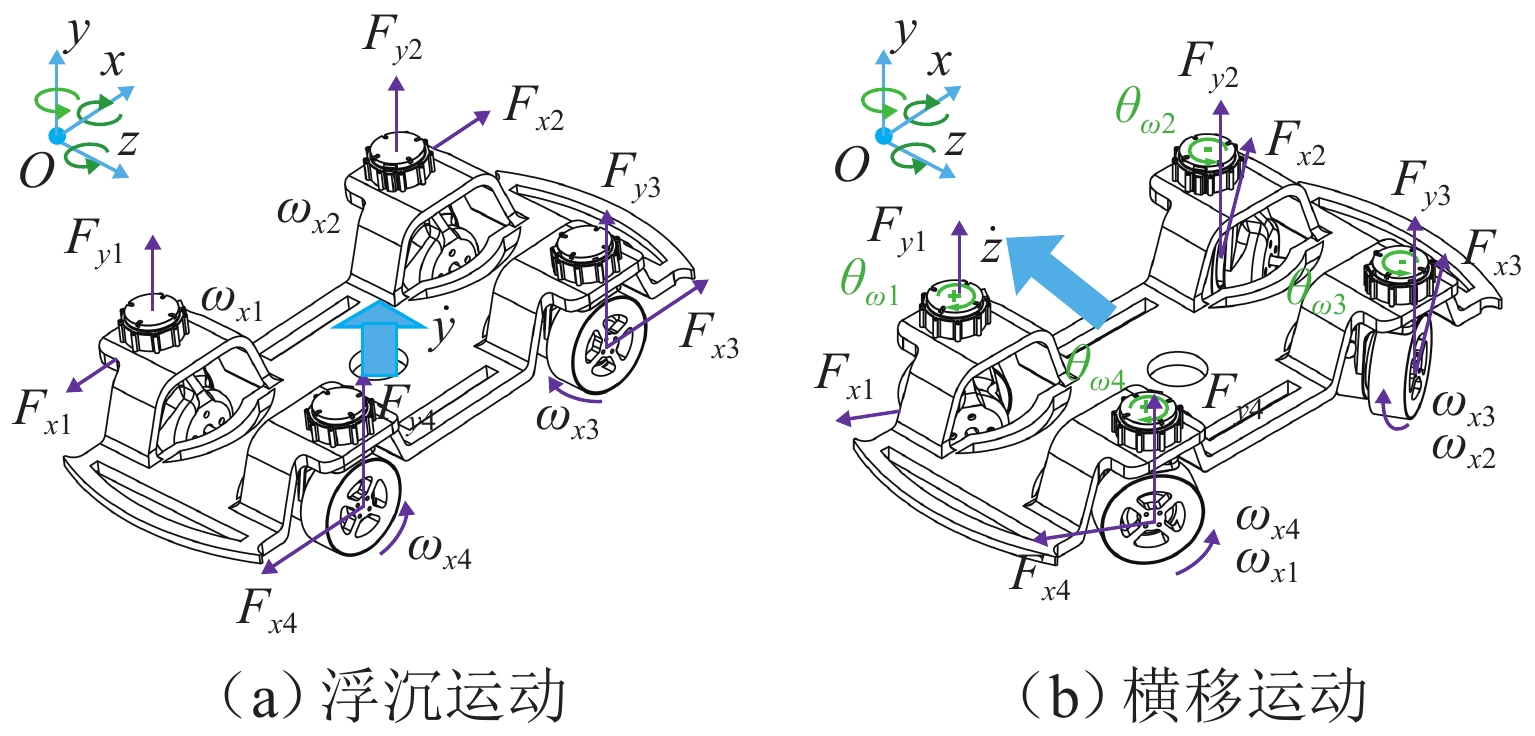
图 7 月球磁悬浮车辆系统结构示意[50]
Figure 7. Schematic diagram of system structure of lunar maglev vehicle
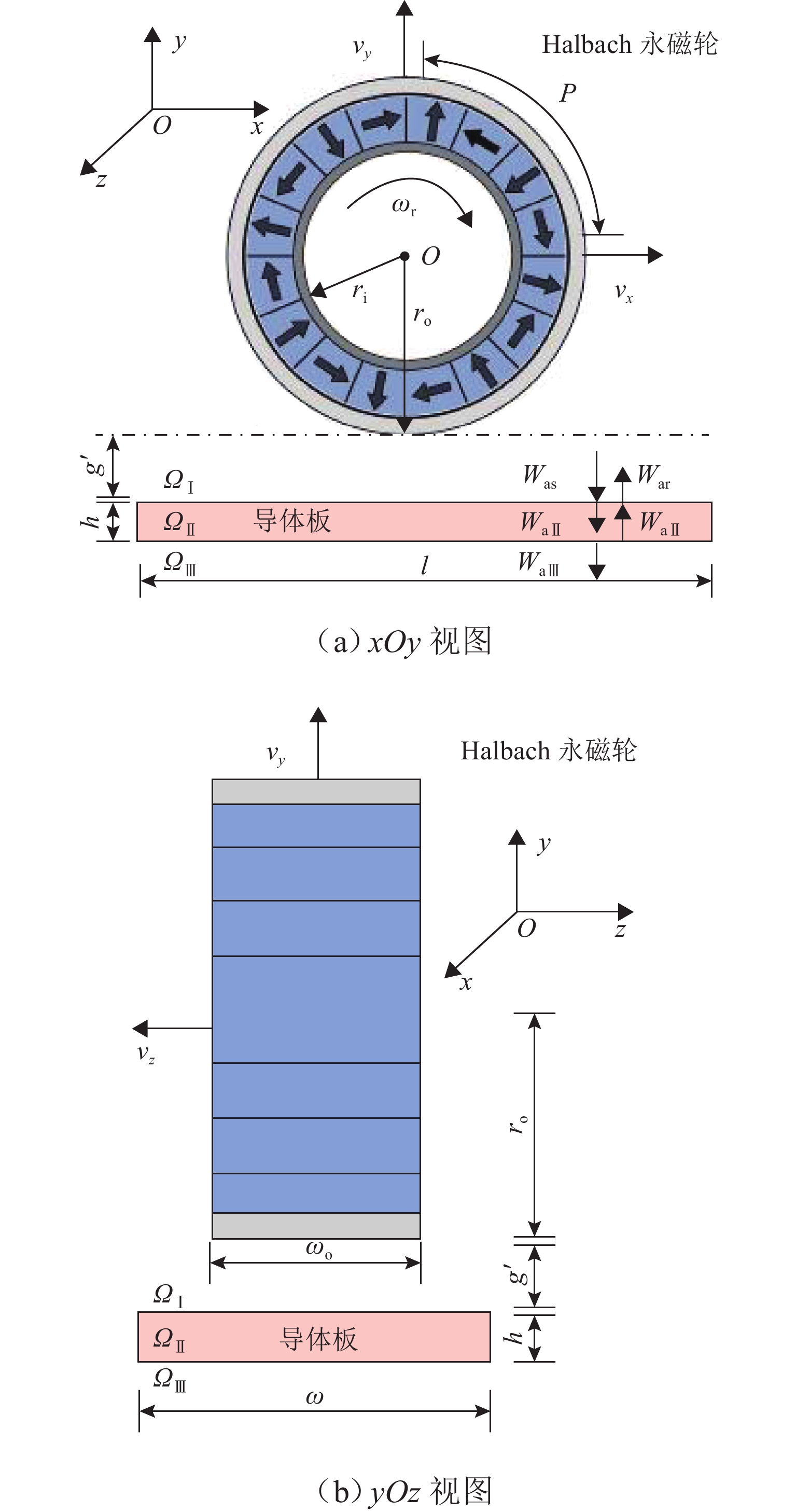
图 9 永磁轮三维电磁力理论模型示意
Figure 9. Schematic diagram of theoretical model for three-dimensional electromagnetic force of permanent magnet wheel
表 1 典型月球移动装备分析对比
Table 1. Analysis and comparison of typical lunar mobile equipments
对比维度 驱动机制 地形适应 运动阻力 系统复杂度 轮式 黏着机械摩擦 中(月壤承载弱) 高(沉陷效应) 中(机构成熟) 履带式/多足式 机械摩擦 高(跨障能力强) 高(机械摩擦大) 高(关节冗余) 跳跃式/弹跳式 机构储能 高(地形影响小) 极高(瞬时力) 中(缓冲复杂) 永磁电动悬浮式 非接触式电磁感应 高(路面要求低) 低(非接触磁阻) 低(无传动部件)  下载: 导出CSV
下载: 导出CSV
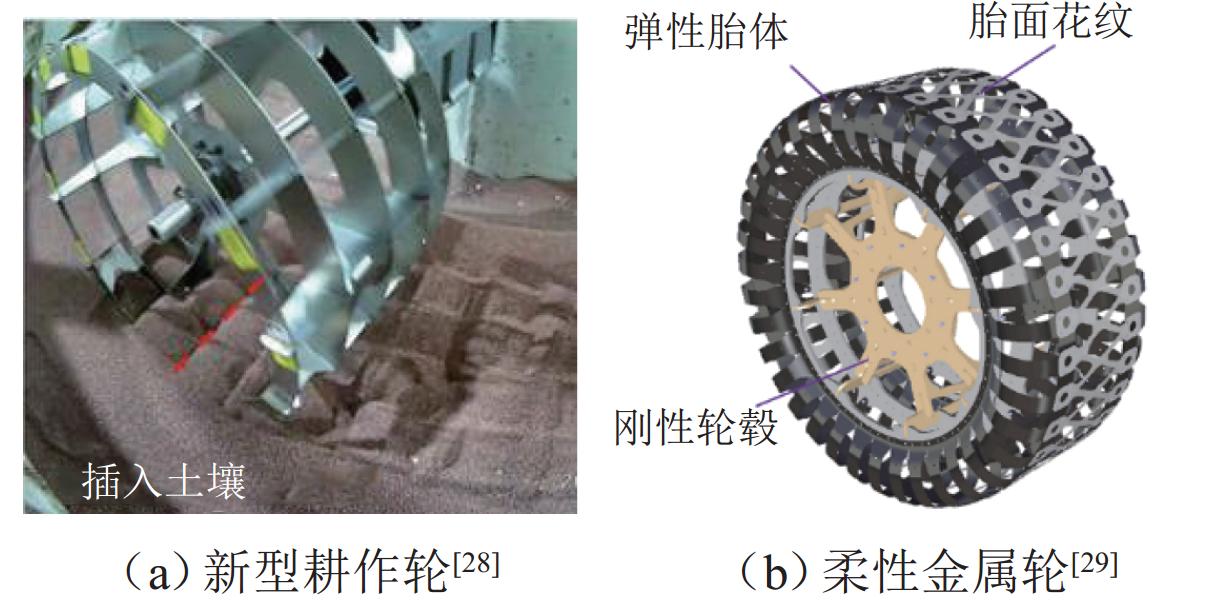
表 2 原理样机结构形式和技术特点汇总
Table 2. Summary of structural forms and technical characteristics of principle prototype
研究对象 设备平台 关键技术 设备图 核心部件永磁轮 永磁轮单轮测试装置[84] 单轮动态特性验证 
轮毂集成式永磁轮[85] 环形Halbach 磁体镶嵌 
永磁轮双轮实验平台[85] 永磁轮对悬浮驱动一体化验证 
月球磁浮车辆原理样机 月球磁悬浮车辆概念样机[79] 采用铝合金车身,四轮分布式驱动 
轨道式四轮磁浮小车模型[63] L型轨道被动导向,辅助稳定行驶 
被动阻尼板式磁悬浮车辆 阻尼板提升偏航稳定性 
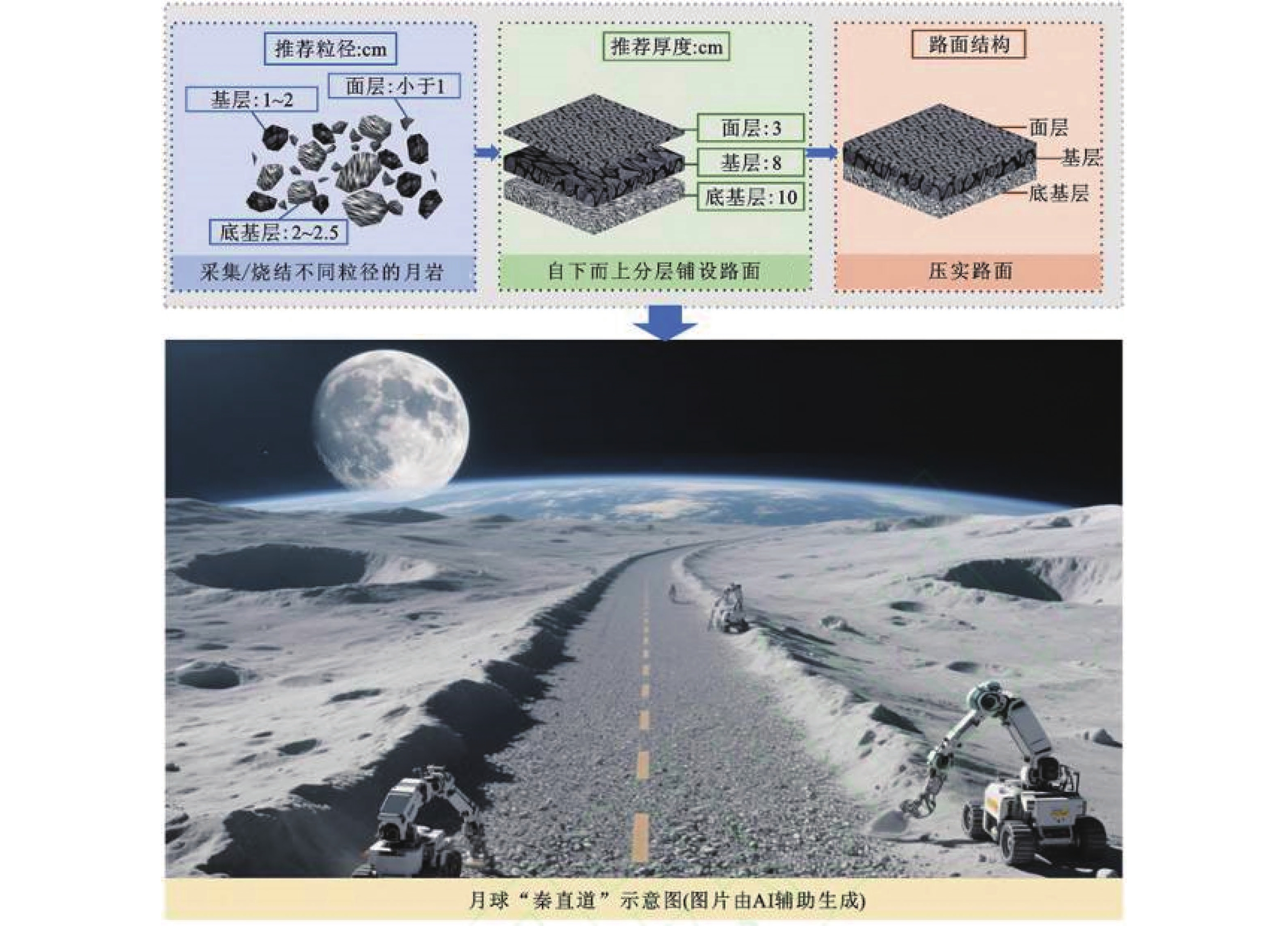
主动导向式磁悬浮车辆[81] 偏转舵机实现主动姿态控制 
内置磁盘式磁悬浮车辆 角动量磁盘抗扭,提升悬浮稳定性 
重心下沉式磁悬浮车辆 下沉式重心,提高运行稳定性 
实车和高速验证平台 磁悬浮车辆动态测试平台[63] 实现低速下悬浮、导向力解耦调节 
时速 600 公里级高速动轨试验台[86] 评估高速运动下,磁轮电磁性能 
载人磁悬浮车辆科学装置 全尺寸要素化,吨级载重下验证功能  下载: 导出CSV
下载: 导出CSV
表 3 全尺寸实车的总体设计参数
Table 3. Overall design parameters of full-size real vehicle
总体参数 数值 整车载重/kg 2160 整车尺寸/mm 3530 ×2362 × 865悬浮间隙/mm 10~15 设计时速/(km·h−1) 30~200
下载: 导出CSV
-
[1] 同济大学学报编辑部. “国际月球科研站建设的理论和关键技术”专题介绍[J]. 同济大学学报(自然科学版), 2024, 52(8): 1148. [2] 周诚, 高玉月, 覃文波, 等. 月球基地建造的发展趋势、目标体系与政策路径[J]. 科学通报, 2025, 70(21): 3460-3469.ZHOU Cheng, GAO Yuyue, QIN Wenbo, et al. The development trend, objectives, and policy path of lunar base construction[J]. Chinese Science Bulletin, 2025, 70(21): 3460-3469. [3] FENG Y J, LI P S, LI H T, et al. Navigating the lunar frontier: one hundred landing sites at the south pole for future mission challenges[J]. Science Bulletin, 2025, 70(20): 3409-3419. doi: 10.1016/j.scib.2025.08.035 [4] 刘波, 孙鹏, 姚伟. 月球采矿的智能矿场构想[J]. 宇航学报, 2025, 46(8): 1694-1708.LIU Bo, SUN Peng, YAO Wei. Conception of intelligent mine field for lunar mining[J]. Journal of Astronautics, 2025, 46(8): 1694-1708. [5] 于登云, 潘博, 马超. 星球探测机器人研究现状与发展展望[J]. 宇航学报, 2023, 44(4): 633-643. doi: 10.3873/j.issn.1000-1328.2023.04.016YU Dengyun, PAN Bo, MA Chao. Research status and development prospect of planetary exploration robots[J]. Journal of Astronautics, 2023, 44(4): 633-643. doi: 10.3873/j.issn.1000-1328.2023.04.016 [6] 张星宇, 吴保磊, 王军, 等. 基于滑移预测的月球车双层路径规划方法研究[J]. 系统仿真学报, 2025, 37(4): 1008-1024. doi: 10.16182/j.issn1004731x.joss.23-1552ZHANG Xingyu, WU Baolei, WANG Jun, et al. Research on dual-layer path planning method for lunar rover based on slip prediction[J]. Journal of System Simulation, 2025, 37(4): 1008-1024. doi: 10.16182/j.issn1004731x.joss.23-1552 [7] 张元勋, 黄靖, 韩亮亮. 星表移动探测机器人研究现状综述[J]. 航空学报, 2021, 42(1): 55-72.ZHANG Yuanxun, HUANG Jing, HAN Liangliang. Research status of planetary surface mobile exploration robots: Review[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(1): 55-72. [8] 梁忠超, 王永富, 刘振, 等. 重力不同引起的载人月球车操纵差异分析[J]. 哈尔滨工业大学学报, 2017, 49(1): 114-119. doi: 10.11918/j.issn.0367-6234.2017.01.016LIANG Zhongchao, WANG Yongfu, LIU Zhen, et al. Analysis on handling deviation caused by different gravities for lunar roving vehicle[J]. Journal of Harbin Institute of Technology, 2017, 49(1): 114-119. doi: 10.11918/j.issn.0367-6234.2017.01.016 [9] 李卫华, 郭军龙, 丁亮, 等. 月球车地面遥操作技术发展现状与未来展望[J]. 航空学报, 2023, 44(1): 026333.LI Weihua, GUO Junlong, DING Liang, et al. State of art and prospects of ground teleoperation technology for lunar rover[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(1): 026333. [10] 肖万伸, 张岩. 载人月球车车轮设计及基于弹性车轮轮壤相互作用的力学模型研究[J]. 机械工程学报, 2016, 52(10): 119-125.XIAO Wanshen, ZHANG Yan. Design of wheel of manned lunar rover and research on terramechanics model for wheel-terrain interaction based on elastic wheel[J]. Journal of Mechanical Engineering, 2016, 52(10): 119-125. [11] 曹剑飞, 梁常春, 王瑞, 等. 载人月球车稳定操控策略设计与优化[J]. 宇航学报, 2023, 44(9): 1379-1391.CAO Jianfei, LIANG Changchun, WANG Rui, et al. Design and optimization of stable control strategy for manned lunar rover[J]. Journal of Astronautics, 2023, 44(9): 1379-1391. [12] 王康, 齐迎春, 梁常春, 等. 高折展比载人月球应急返回车设计与分析[J]. 光学 精密工程, 2023, 31(5): 697-706.WANG Kang, QI Yingchun, LIANG Changchun, et al. Design and analysis of the manned lunar vehicle for emergency with deployable structure[J]. Optics and Precision Engineering, 2023, 31(5): 697-706. [13] 张卫华, 邓自刚, 毕海权, 等. 低真空超高速轨道交通研究进展与思考[J]. 机车电传动, 2025(1): 1-13. doi: 10.13890/j.issn.1000-128X.2025.01.109ZHANG Weihua, DENG Zigang, BI Haiquan, et al. Research review and reflections on ultra-high-speed rail transit in low-vacuum environments[J]. Electric Drive for Locomotives, 2025(1): 1-13. doi: 10.13890/j.issn.1000-128X.2025.01.109 [14] 郑杰, 邓斌, 邓自刚, 等. 高温超导磁浮车直线电机悬挂系统主动控制[J]. 机车电传动, 2024(5): 132-138. doi: 10.13890/j.issn.1000-128X.2024.05.018ZHENG Jie, DENG Bin, DENG Zigang, et al. Active control of linear motor suspension systems in high-temperature superconducting maglev trains[J]. Electric Drive for Locomotives, 2024(5): 132-138. doi: 10.13890/j.issn.1000-128X.2024.05.018 [15] 张育林, 刘红卫, 蒋超, 等. 地月空间发展的若干工程与技术问题[J]. 宇航学报, 2023, 44(4): 612-632.ZHANG Yulin, LIU Hongwei, JIANG Chao, et al. Several engineering and technical issues in the development of cislunar space[J]. Journal of Astronautics, 2023, 44(4): 612-632. [16] BI J G, KE Z H, YANG Y Y, et al. Integrated levitation–propulsion–guidance implementation and operation control for active-steering maglev car[J]. IEEE Transactions on Transportation Electrification, 2026, 12(1): 652-664. doi: 10.1109/TTE.2025.3619995 [17] GAO H, LIU Z, YUAN R. Prospective developments in planetary rovers for future exploration missions[J]. Science and Technology Review, 2025, 4(2): 158-173. [18] 邓宗全, 范雪兵, 高海波, 等. 载人月球车移动系统综述及关键技术分析[J]. 宇航学报, 2012, 33(6): 675-689.DENG Z Q, FAN X B, GAO H, et al. Review and key techniques for locomotive system of manned lunar rovers[J]. Journal of Astronautics, 2012, 33(6): 675-689. [19] FORTUNA S, RONCAGLIOLO P, GRAZIATO D, et al. ROS 2-based autonomous navigation strategy for a lunar rover featuring multiple locomotion modes[J]. Acta Astronautica, 2026, 238: 985-996. [20] ZHOU L B, ZHANG Y M, SHI J W, et al. An analysis of the Yutu lunar rover’s mobility performance using a multibody dynamics framework and a physics-based terramechanics model[J]. Engineering with Computers, 2025, 41(5): 3755-3786. [21] NIKSIRAT P, DACA A, SKONIECZNY K. The effects of reduced-gravity on planetary rover mobility[J]. The International Journal of Robotics Research, 2020, 39(7): 797-811. [22] DACA A, TREMBLAY D, SKONIECZNY K. Experimental evaluation of cone index gradient as a metric for the prediction of wheel performance in reduced gravity[J]. Journal of Terramechanics, 2022, 99: 1-16. [23] ZHU J Z, HU Y M, WANG K, et al. DEM–FEM simulation of steering performance of flexible metal wheel for staffed lunar rover[J]. Mechanical Sciences, 2025, 16(2): 719-728. [24] OMURA T, ISHIGAMI G. Evaluating and advancing scaling methods for reliable wheel mobility prediction in low-gravity environments[J]. Journal of Terramechanics, 2026, 122: 101104. [25] WATANABE K, OTANI Y, TANAKA K. The effects of speed on the running performance of a small two-wheeled lunar rover[J]. Aerospace, 2025, 12(2): 115. [26] GUO J L, LI W H, GAO H B, et al. In-situ wheel sinkage estimation under high slip conditions for grouser-wheeled planetary rovers: another immobility index[J]. Mechanism and Machine Theory, 2021, 158: 104243. [27] WANG Z Y, DING L, YANG H G, et al. Linear prediction of high-slip sinkage for planetary rovers’ lugged-wheels based on superposition principle[J]. IEEE Robotics and Automation Letters, 2023, 8(3): 1247-1254. [28] DONG X J, JIN J F, JIA Z C, et al. Design and passability study of soil-plowing wheel facing soft terrain[J]. Journal of Terramechanics, 2025, 117: 101002. [29] ZHU J Z, SHEN Y, HAO P J, et al. Modeling of flexible metal wheel for pressurized lunar rover and traction performance prediction[J]. Journal of Field Robotics, 2023, 40(8): 2030-2041. [30] IIZUKA K, SASAKI T, SUZUKI S, et al. Study on grouser mechanism to directly detect sinkage of wheel during traversing loose soil for lunar exploration rovers[J]. ROBOMECH Journal, 2014, 1(1): 1-15. [31] 刘佳媛, 王浩, 李峰, 等. 月球“秦直道”: 月面道路设计构想与发展路径[J]. 中国公路学报, 2026, 39(1): 222-234.LIU Jiayuan, WANG Hao, LI Feng, et al. Lunar “Qinzhidao”: conceptual design and development path of lunar macadam road[J]. China Journal of Highway and Transport, 2026, 39(1): 222-234. [32] SAKAYORI G, ISHIGAMI G. Energy-aware trajectory planning for planetary rovers[J]. Advanced Robotics, 2021, 35(21/22): 1302-1316. [33] FENG Y J, XI M R, LI P S, et al. Energy-efficient local path planning for lunar rovers using fuzzy dynamic window approach[J]. Transactions in GIS, 2025, 29(7): e70118. [34] LIU Z, CHEN S, HU L Q, et al. Dynamics modeling and stability analysis of lunar crew vehicles on uneven terrain[J]. Proceedings of the Institution of Mechanical Engineers, Part K: Journal of Multi-body Dynamics, 2025: 14644193251374653. [35] ZHOU S N, LIU Z, GAO H B, et al. Turn-on/off control with dynamic significance of active suspension based on energy dissipation principle for manned lunar rover under low gravity and rough terrain conditions[J]. Mechanical Systems and Signal Processing, 2024, 209: 111071. [36] CHEN W, DU F, XIE S L, et al. Motion perception simulation for lunar rover driving using the spatial orientation observer model[J]. Vehicles, 2025, 7(2): 1-56. [37] LI X, CAI B Y, ZHAO H J, et al. Scalable functionalized shape memory alloy fiber with synergistic effect for robotic hand and microrobot[J]. npj Flexible Electronics, 2025, 9: 88. [38] O’NEILL G K. The colonization of space[J]. Physics Today, 1974, 27(9): 32-40. [39] BILLINGHAM J, GILBREATH W, O’LEARY B. Space resources and space settlements[R]. Washington D. C.: NASA Headquarters, 1979. [40] APEL U. Comparison of alternative concepts for lunar surface transportation[J]. Acta Astronautica, 1988, 17(4): 445-456. [41] ECKART P. The lunar base handbook: an introduction to lunar base design, development, and operations[M]. New York: McGraw-Hill Companies, 1999. [42] ESA. Mission to the Moon: report of the lunar study steering group[R]. Noordwijk: ESA Publications Division, 1992. [43] NASA. The Artemis plan: NASA’s lunar exploration program overview[R]. Washington D. C.: NASA Headquarters, 2020. [44] SMITH M, CRAIG D, HERRMANN N, et al. The Artemis program: an overview of NASA’s activities to return humans to the moon[C]//2020 IEEE Aerospace Conference. MT: IEEE, 2020: 1-10. [45] 任筱强, 吴伟仁, 王洪雨, 等. 月球探测发展与关键技术展望[J]. 深空探测学报(中英文), 2025, 12(2): 99-109.REN Xiaoqiang, WU Weiren, WANG Hongyu, et al. Prospects of the lunar exploration development and key technologies[J]. Journal of Deep Space Exploration, 2025, 12(2): 99-109. [46] WU Weiren. International lunar research station[J]. Aerospace China, 2023, 24(1): 10-14. [47] NASA. Flexible levitation on a track (FLOAT) [EB/OL]. (2024-05-13) [2026-01-29]. https://www.nasa.gov/general/flexible-levitation-on-a-track-float/. [48] VAMPOLA J. New niac phase Ⅱ advanced projects selected by NASA [EB/OL]. (2024-05-15) [2026-01-29]. https://spacevoyaging.com/news/new-niac-phase-ii-advanced-projects-selected-by-nasa/. [49] MICHAEL D, JAMES C, KLINKNER S, et al. The lunar-magway: phase 0/a study of a sustainable high-speed transportation system for lunar infrastructures [C]//Proceedings of 76th International Astronautical Congress (IAC). Paris: IAF, 2025: 1-24. [50] YUAN Y, DENG Z G, ZHANG S, et al. Working principle and primary electromagnetic characteristics of a permanent magnet electrodynamic wheel for maglev car application[J]. IEEE Transactions on Applied Superconductivity, 2021, 31(8): 3603905. [51] ZHANG Z R, WANG C, GENG W W. Design and optimization of halbach-array PM rotor for high-speed axial-flux permanent magnet machine with ironless stator[J]. IEEE Transactions on Industrial Electronics, 2020, 67(9): 7269-7279. [52] SHI H F, DENG Z G, ZHANG B J, et al. Thermal-force coupling analysis of permanent magnet electrodynamic wheel system for maglev car[J]. IEEE Transactions on Magnetics, 2023, 59(1): 6300109. [53] FU S Q, CHI M G, SHU A Q, et al. Dynamic study on a passive damping scheme for permanent magnet electrodynamic suspension vehicle utilizing onboard magnets end effects[J]. Actuators, 2025, 14(7): 344. [54] 刘建忠, 李雄耀, 朱凯, 等. 月球原位资源利用及关键科学与技术问题[J]. 中国科学基金, 2022, 36(6): 907-918.LIU Jianzhong, LI Xiongyao, ZHU Kai, et al. Key science and technology issues of lunar in situ resource utilization[J]. Bulletin of National Natural Science Foundation of China, 2022, 36(6): 907-918. [55] 李春来, 严韦, 刘建军, 等. 中国月球探测促进月球与行星科学创新发展[J]. 中国科学: 地球科学, 2023, 53(11): 2437-2456.LI Chunlai , YAN Wei, LIU Jianjun, et al. Innovative developments in lunar and planetary science promoted by China’s lunar exploration[J]. Scientia Sinica (Terrae), 2023, 53(11): 2437-2456. [56] XIAO X, YU S R, HUANG J, et al. Thermophysical properties of the regolith on the lunar far side revealed by the in situ temperature probing of the Chang’E-4 mission[J]. National Science Review, 2022, 9(11): 1-9. [57] MATULA R A. Electrical resistivity of copper, gold, palladium, and silver[J]. Journal of Physical and Chemical Reference Data, 1979, 8(4): 1147-1298. [58] KIM J W, KIM S H, SONG S Y, et al. Nd—Fe—B permanent magnets fabricated by low temperature sintering process[J]. Journal of Alloys and Compounds, 2013, 551: 180-184. [59] SHI H F, KE Z H, ZHENG J, et al. An effective optimization method and implementation of permanent magnet electrodynamic wheel for maglev car[J]. IEEE Transactions on Vehicular Technology, 2023, 72(7): 8369-8381. [60] 孙睿雪. 高温超导-永磁混合悬浮车的磁力特性解析分析与系统优化设计研究[D]. 成都: 西南交通大学, 2020: 7-15. [61] BIRD J, LIPO T A. A 3-D magnetic charge finite-element model of an electrodynamic wheel[J]. IEEE Transactions on Magnetics, 2008, 44(2): 253-265. [62] PAUL S, BOBBA D, PAUDEL N, et al. Source field modeling in air using magnetic charge sheets[J]. IEEE Transactions on Magnetics, 2012, 48(11): 3879-3882. [63] WRIGHT J D. Modeling, analysis, and control of a radial electrodynamic wheel vehicle and analysis of an axial electrodynamic wheel[D]. Charlotte: University of North Carolina at Charlotte, 2019. [64] YANG Y Y, KE Z H, BI J G, et al. Analysis of electromagnetic force characteristics and wheelbase design of maglev car based on double permanent magnet electrodynamic wheels[J]. Journal of Applied Physics, 2024, 136(21): 214901. [65] 李凯文, 郑珺, 向雨晴, 等. 一种用于磁悬浮汽车的永磁电动轮的优化策略[J]. 哈尔滨工业大学学报, 2024, 56(7): 162-170.LI Kaiwen, ZHENG Jun, XIANG Yuqing, et al. Optimization strategy of permanent magnet electrodynamic wheel for magnetic levitation car[J]. Journal of Harbin Institute of Technology, 2024, 56(7): 162-170. [66] 陈怡浩, 梁乐, 刘新, 等. 环形Halbach永磁轮新型充磁设计及磁力特性研究[J]. 机车电传动, 2024(4): 107-117.CHEN Yihao, LIANG Le, LIU Xin, et al. Novel design of magnetization and study of magnetic force characteristics of annular Halbach permanent magnet electrodynamic wheel[J]. Electric Drive for Locomotives, 2024(4): 107-117. [67] 刘新, 邓自刚, 梁乐, 等. 基于斜置环形Halbach永磁轮的磁浮列车“悬浮-导向-推进”一体化方案设计[J]. 机车电传动, 2023(2): 90-96.LIU Xin, DENG Zigang, LIANG Le, et al. Levitation‒guidance‒propulsion integrated design for maglev trains based on oblique ring Halbach permanent magnet wheels[J]. Electric Drive for Locomotives, 2023(2): 90-96. [68] BIRD J, LIPO T A. Calculating the forces created by an electrodynamic wheel using a 2-D steady-state finite-element method[J]. IEEE Transactions on Magnetics, 2008, 44(3): 365-372. [69] WU H, ZENG X H, GAO D G, et al. Dynamic stability of an electromagnetic suspension maglev vehicle under steady aerodynamic load[J]. Applied Mathematical Modelling, 2021, 97: 483-500. [70] 赵春发, 刘浩东, 冯洋, 等. 五位姿参数下车载永磁体与永磁轨道之间的磁力特性研究[J]. 西南交通大学学报, 2024, 59(4): 804-811.ZHAO Chunfa, LIU Haodong, FENG Yang, et al. Magnetic force characteristics between on-board permanent magnet and permanent magnetic rail considering five pose parameters[J]. Journal of Southwest Jiaotong University, 2024, 59(4): 804-811. [71] 孙友刚, 黄志创, 林国斌, 等. 高速磁浮车辆悬浮系统多元基神经网络容错控制[J]. 交通运输工程学报, 2025, 25(2): 61-74.SUN Yougang, HUANG Zhichuang, LIN Guobin, et al. Fault-tolerant control for levitation systems of high-speed maglev train based on diversified basis neural networks[J]. Journal of Traffic and Transportation Engineering, 2025, 25(2): 61-74. [72] SUN Y G, QIANG H Y, WANG L, et al. A fuzzy-logic-system-based cooperative control for the multielectromagnets suspension system of maglev trains with experimental verification[J]. IEEE Transactions on Fuzzy Systems, 2023, 31(10): 3411-3422. [73] SUN Y G, XU J Q, LIN G B, et al. Adaptive neural network control for maglev vehicle systems with time-varying mass and external disturbance[J]. Neural Computing and Applications, 2023, 35(17): 12361-12372. [74] SUN Y G, HE Z Y, XU J Q, et al. Cooperative model predictive levitation control for two-points electromagnetic levitation system of high-speed maglev vehicle[J]. IEEE Transactions on Intelligent Vehicles, 2023, 2023: 1-12. [75] 孙友刚, 张丹丹, 吉文, 等. 基于模糊补偿的磁浮列车悬浮系统非奇异终端滑模控制[J]. 西南交通大学学报, 2025, 60(4): 803-811.SUN Yougang, ZHANG Dandan, JI Wen, et al. Fuzzy compensation-based non-singular terminal sliding mode control of maglev vehicle levitation system[J]. Journal of Southwest Jiaotong University, 2025, 60(4): 803-811. [76] 李自康, 戴春辉, 黄翠翠, 等. 基于多种群遗传算法的磁浮列车自抗扰速度控制[J]. 西南交通大学学报, 2025, 60(4): 912-920.LI Zikang, DAI Chunhui, HUANG Cuicui, et al. Active disturbance rejection speed control for maglev trains based on multiple population genetic algorithm[J]. Journal of Southwest Jiaotong University, 2025, 60(4): 912-920. [77] LI Z Y, KE Z H, SHI J H, et al. Investigation of RBF-SMC control strategy for vertical dynamics of maglev car considering temperature rise effects[J]. IEEE Transactions on Intelligent Vehicles, 2025, 10(5): 3560-3572. [78] ZHANG B J, KE Z H, LI Z Y, et al. Yawing stability and manipulative approach design for maglev car based on active disturbance rejection control[J]. Asian Journal of Control, 2024, 26(2): 1003-1016. [79] 张泽. 永磁电动悬浮汽车原理模型动态特性研究[D]. 成都: 西南交通大学, 2021. [80] LIN P, DENG Z G, KE Z H, et al. Dynamic characteristics and working modes of permanent magnet electrodynamic suspension vehicle system based on six wheels of annular halbach structure[J]. Technologies, 2023, 11(1): 16. [81] 毕经国, 柯志昊, 杨轶莹, 等. 基于改进NMPC的永磁电动悬浮汽车横向控制[J]. 西南交通大学学报, 2025, 60(4): 851-864.BI Jingguo, KE Zhihao, YANG Yiying, et al. Lateral control of permanent magnet electrodynamic suspension vehicle based on improved nonlinear model predictive controller[J]. Journal of Southwest Jiaotong University, 2025, 60(4): 851-864. [82] 赵春发, 李煜寒, 彭也也, 等. 超导电动悬浮列车明线气动特性及其对悬浮状态的影响[J]. 西南交通大学学报, 2025, 60(4): 793-802.ZHAO Chunfa, LI Yuhan, PENG Yeye, et al. Aerodynamic characteristics of open wire of superconducting maglev train and its influence on levitation state[J]. Journal of Southwest Jiaotong University, 2025, 60(4): 793-802. [83] 刘伟, 赵春发, 娄会彬, 等. 基于虚拟激励法的磁浮车桥耦合系统随机振动分析[J]. 西南交通大学学报, 2024, 59(4): 823-831.LIU Wei, ZHAO Chunfa, LOU Huibin, et al. Stochastic vibration analysis of maglev train-bridge coupling system based on pseudo excitation method[J]. Journal of Southwest Jiaotong University, 2024, 59(4): 823-831. [84] PAUDEL N, BIRD J Z, PAUL S, et al. Modeling the dynamic suspension behavior of an eddy current device[C]//2011 IEEE Energy Conversion Congress and Exposition. Phoenix: IEEE, 2011: 1692-1699. [85] 张帅. 永磁电动悬浮系统磁轮电磁特性的研究[D]. 成都: 西南交通大学, 2017. [86] 易辉阳. 永磁电动轮磁浮车系统建模与纵向驱动控制研究[D]. 成都: 西南交通大学, 2024. -

 下载:
下载:

 点击查看大图
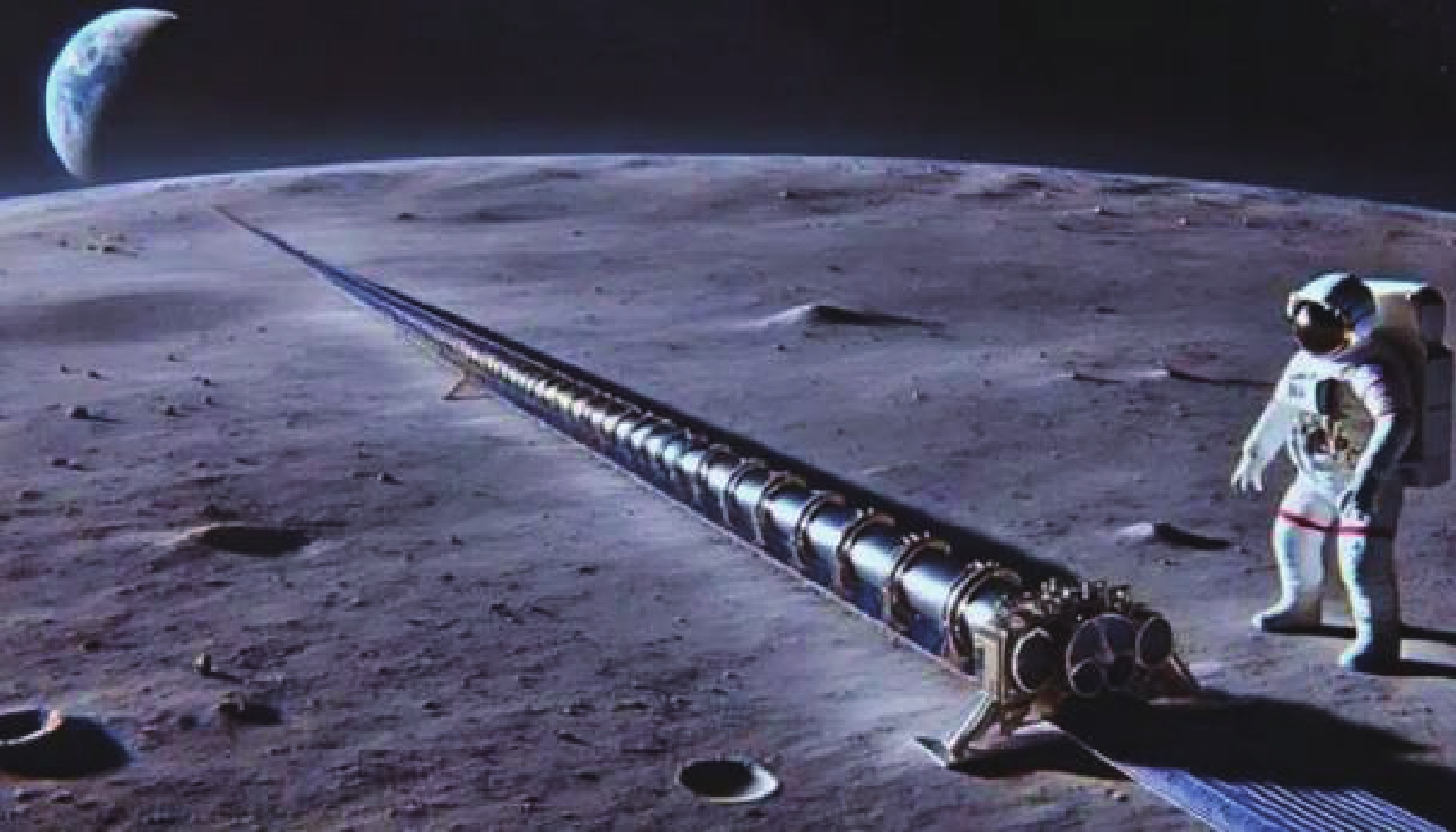
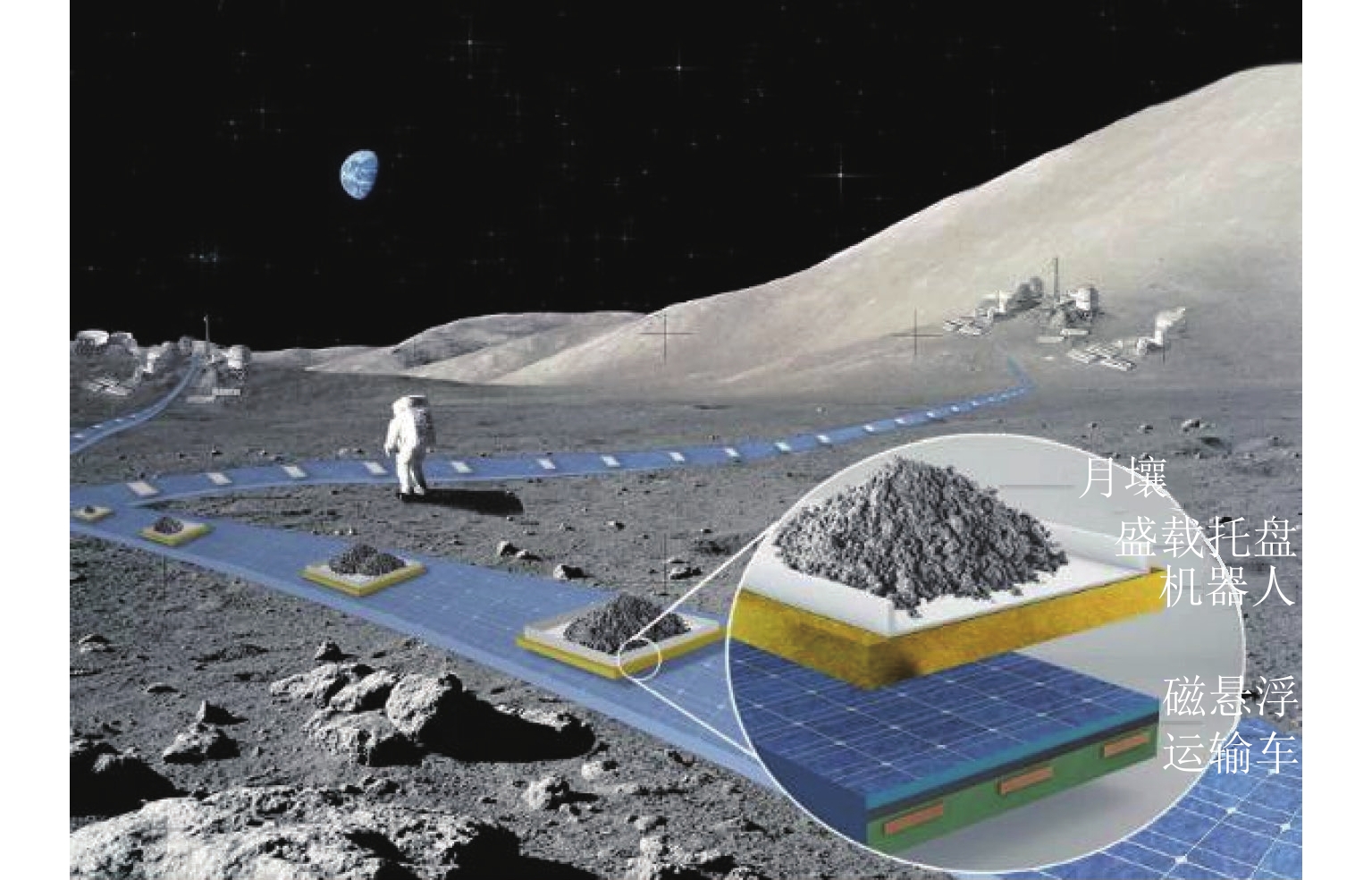
点击查看大图
计量
- 文章访问数: 361
- HTML全文浏览量: 165
- PDF下载量: 71
- 被引次数: 0