

Evolutionary Pathways, Key Challenges, and Future Prospects of Human-Centered Collaborative Autonomous Driving Systems
-
摘要:
随着自动驾驶系统的发展,“长尾场景”的瓶颈日益凸显,证明了以技术主导的 “自动化替代”路线缺乏对人类角色、人机关系与系统伦理的完整定义. 本研究首先梳理自动驾驶系统从“工具化辅助”到“自动化主导”,最终迈向“协同化管控”的演进脉络,阐释人机关系从单向控制转向双向协作的本质变革;其次,针对动态信任机制的建立与维持、控制权限的实时优化分配,以及双向协同交互范式的构建等制约协同效能提升的关键挑战,阐述其在认知机理、控制理论与交互设计层面的内在逻辑、影响因素与现存瓶颈;最后,系统性提出发展基于多源融合的人类状态感知与建模技术、探索基于实时评估的自适应协同控制架构,以及实现从“单向通知”到“双向协同”的交互范式转变,以完善自动驾驶系统的未来发展路径. 本研究通过对既有理论、技术路线与应用案例的综述研究,为推进可理解、可信赖、可广泛接受的“人本协同”自动驾驶系统发展提供了系统性理论支撑与实践参考.
Abstract:With the development of autonomous driving systems, the increasingly prominent bottleneck of “long-tail scenarios” demonstrates that the technology-driven “automation substitution” approach lacks a complete definition of human roles, human-machine relationships, and system ethics. First, the evolutionary pathways of autonomous driving systems from “tool-based assistance” to “automation-led” and ultimately to “collaborative control” were traced, and the fundamental transformation of the human-machine relationship from one-way control to two-way collaboration was elucidated. Secondly, to address key challenges that restrict the improvement of collaborative efficiency, such as the establishment and maintenance of dynamic trust mechanisms, the real-time optimal allocation of control permissions, and the construction of two-way collaborative interaction paradigms, their inherent logic, influencing factors, and existing bottlenecks at the levels of cognitive mechanisms, control theory, and interaction design were expounded on. Finally, developing human state perception and modeling technologies based on multi-source fusion, exploring adaptive collaborative control architectures based on real-time evaluation, and realizing the interaction paradigm shift from “one-way notification” to “two-way collaboration” were systematically proposed, which refined the future development pathways of autonomous driving systems. Through a review of existing theories, technical routes, and application cases, systematic theoretical support and practical references are provided for promoting the development of understandable, trustworthy, and widely acceptable “human-centered collaborative” autonomous driving systems.
-
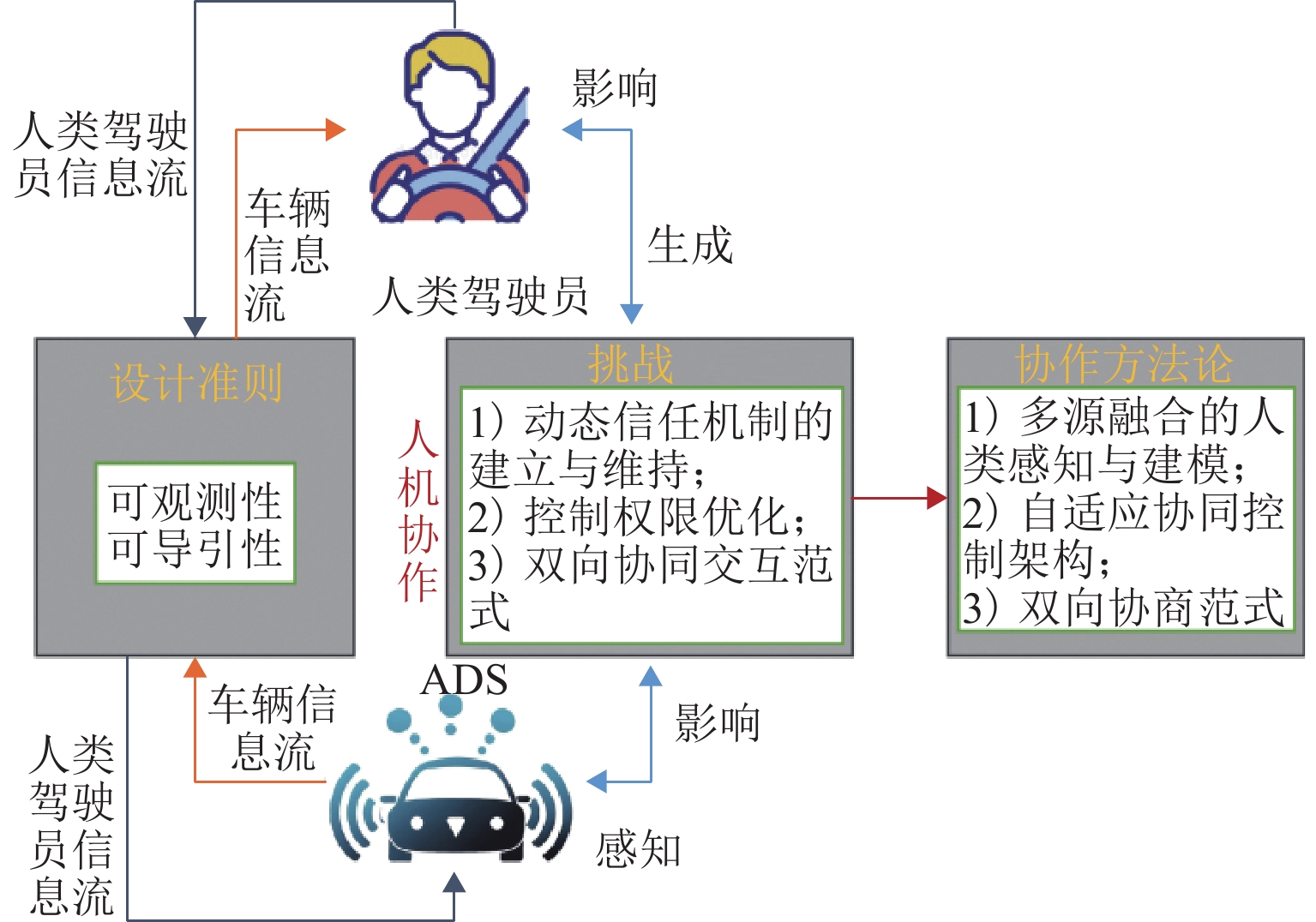
图 1 HCC-ADS中人机协作设计准则、挑战与协作方法论
Figure 1. Design principles, challenges, and collaborative methodologies for human-machine collaboration in HCC-ADS
表 1 自动驾驶系统向“人本协同”范式演进路径
Table 1. Evolutionary pathways of autonomous driving systems towards a “human-centered collaboration” paradigm
对比维度 工具化辅助阶段 自动化主导阶段 协同化探索阶段 “人本协同”
范式核心特征核心目标 在人类驾驶员全权负责下,提升特定任务的执行精度与舒适度[42] 优化系统的驾驶平顺性、安全性及接管效率,减轻人类驾驶员负担[27-28] 追求人机团队的整体安全性、任务成功率与用户体验[35-36] 追求人机系统效能最优化及干预最小化 交互逻辑 人类决策并主导,系统被动响应指令或提供预警,无复杂交互 系统主导驾驶,人类负责监控与接管;交互多为系统发起的状态通知或接管请求 强调人机双向意图理解与透明通信,支持共享控制与即时反馈[37] 基于驾驶员意图识别与系统可解释性的双向闭环信息流 角色分配 人类为唯一驾驶员,系统为无自主性的工具 系统为“驾驶员”,人类为监督者/接管者. 角色切换由系统状态触发[27-28] 基于实时情境、系统能力与人类驾驶员状态,动态协商与分配控制权与责任 从静态分工转向动态适配,实现个性化与自适应的协作角色分配[5] 信任基础 信任基于单一功能的可靠性与实用性 信任建立在系统整体表现的稳定与安全记录上,脆弱且易崩溃[29-30] 信任源于系统的透明度、能力边界声明及在协作中表现出的可预测性与共情能力 从基于表现的信任转向基于理解与韧性的信任,通过信任校准机制建立长期稳健的合作关系 技术重心 实现精准的纵向/横向控制 提升系统独立驾驶的鲁棒性 整合人类驾驶员状态监控、意图识别、共享控制与自然人机交互(HMI)[35-36] 整合人因特征建模、人机共享决策模型与自适应控制架构 主要风险/局限 完全依赖人类导致疲劳、分心及反应能力局限[25-26] 警惕性下降、情境意识断裂、技能退化、自动化悖论,在长尾场景下系统能力边界突显[10] 人机意图对齐的复杂性、认知脱节后的情境意识快速恢复,以及建立深度互信的挑战[39-40] 将人的局限性和人因风险转化为设计输入与协作核心,通过协同机制主动缓解 协作范式 系统是工具,尚未形成协作关系 以系统效率与安全为中心的主从式协作,人作为后备 以人机整体效能与用户体验为中心的伙伴式协作探索 成熟的人本协作范式,实现安全、舒适、可信且广泛接受的自动驾驶  下载: 导出CSV
下载: 导出CSV
-
[1] FENG S, SUN H W, YAN X T, et al. Dense reinforcement learning for safety validation of autonomous vehicles[J]. Nature, 2023, 615(7953): 620-627. doi: 10.1038/s41586-023-05732-2 [2] 陶永, 闫学东, 王田苗, 等. 面向未来智能社会的智能交通系统发展策略[J]. 科技导报, 2016, 34(7): 48-53.TAO Yong, YAN Xuedong, WANG Tianmiao, et al. Development strategy of intelligent transportation system for future intelligent society[J]. Science & Technology Review, 2016, 34(7): 48-53. [3] 陈虹, 郭露露, 宫洵, 等. 智能时代的汽车控制[J]. 自动化学报, 2020, 46(7): 1313-1332. doi: 10.16383/j.aas.c190329CHEN Hong, GUO Lulu, GONG Xun, et al. Automotive control in intelligent era[J]. Acta Automatica Sinica, 2020, 46(7): 1313-1332. doi: 10.16383/j.aas.c190329 [4] BERGER C, RUMPE B. Autonomous driving-5 years after the urban challenge: the anticipatory vehicle as a cyber-physical system[EB/OL]. (2014-09-02)[2026-01-15]. https://arxiv.org/abs/1409.0413. [5] CHEN L, WANG H J, CAO D P, et al. Characterization of driver neuromuscular dynamics for human–automation collaboration design of automated vehicles[J]. IEEE/ASME Transactions on Mechatronics, 2018, 23(6): 2558-2567. doi: 10.1109/TMECH.2018.2812643 [6] GUO H Y, SONG L H, LIU J, et al. Hazard-evaluation-oriented moving horizon parallel steering control for driver-automation collaboration during automated driving[J]. IEEE/CAA Journal of Automatica Sinica, 2018, 5(6): 1062-1073. doi: 10.1109/jas.2018.7511225 [7] FITTS P M. Human engineering for an effective air-navigation and traffic-control system[M]. Newyork: Penguin Group, 1951. [8] BOLTON C, MACHOVÁ V, KOVACOVA M, et al. The power of human-machine collaboration: Artificial intelligence, business automation, and the smart economy[J]. Economics, Management, and Financial Markets, 2018, 13(4): 51-56. doi: 10.22381/emfm13420184 [9] JHAVER S, BIRMAN I, GILBERT E, et al. Human-machine collaboration for content regulation: the case of reddit automoderator[J]. ACM Transactions on Computer-Human Interaction, 2019, 26(5): 1-35. doi: 10.1145/3338243 [10] ENDSLEY M R. From here to autonomy: lessons learned from human–automation research[J]. Human Factors, 2017, 59(1): 5-27. doi: 10.1177/0018720816681350 [11] HOC J M. From human–machine interaction to human–machine cooperation[J]. Ergonomics, 2000, 43(7): 833-843. [12] FORSTER Y, HERGETH S, NAUJOKS F, et al. User education in automated driving: owner’s manual and interactive tutorial support mental model formation and human-automation interaction[J]. Information, 2019, 10(4): 143-165. doi: 10.3390/info10040143 [13] NAUJOKS F, PURUCKER C, NEUKUM A. Secondary task engagement and vehicle automation–comparing the effects of different automation levels in an on-road experiment[J]. Trans-portation Research Part F: Traffic Psychology and Behaviour, 2016, 38: 67-82. doi: 10.1016/j.trf.2016.01.011 [14] On-Road Automated Driving (Road) Committee. Taxonomy and definitions for terms related to driving automation systems for on-road motor vehicles[M]. Warrendale: SAE International, 2021. [15] SHERIDAN T B, VERPLANK W L, BROOKS T. Human/computer control of undersea teleoperators[C]//Proceedings of the 14th Annual Conference on Manual Control. Washington D. C.: NASA, 1978: 1-15. [16] MCCALL J C, ACHLER O, TRIVEDI M M, et al. A collaborative approach for human-centered driver assistance systems[C]//Proceedings of The 7th International IEEE Conference on Intelligent Transportation Systems. Piscataway: IEEE, 2005: 663-667. [17] FLEMISCH F, KELSCH J, LOPER C, et al. Cooperative control and active interfaces for vehicle assistance and automation[R]. Munich: FISITA World Automotive Congress, 2008. [18] SOUALMI B, SENTOUH C, POPIEUL J C, et al. Automation-driver cooperative driving in presence of undetected obstacles[J]. Control Engineering Practice, 2014, 24: 106-119. doi: 10.1016/j.conengprac.2013.11.015 [19] MARCANO M, DÍAZ S, PÉREZ J, et al. A review of shared control for automated vehicles: theory and applications[J]. IEEE Transactions on Human-Machine Systems, 2020, 50(6): 475-491. doi: 10.1109/THMS.2020.3017748 [20] 胡云峰, 曲婷, 刘俊, 等. 智能汽车人机协同控制的研究现状与展望[J]. 自动化学报, 2019, 45(7): 1261-1280. doi: 10.16383/j.aas.c180136HU Yunfeng, QU Ting, LIU Jun, et al. Human-machine cooperative control of intelligent vehicle: recent developments and future perspectives[J]. Acta Automatica Sinica, 2019, 45(7): 1261-1280. doi: 10.16383/j.aas.c180136 [21] XIE S S, CHEN S T, ZHENG J Y, et al. From human driving to automated driving: what do we know about drivers?[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(7): 6189-6205. doi: 10.1109/TITS.2021.3084149 [22] GOODALL N J. Ethical decision making during automated vehicle crashes[J]. Transportation Research Record: Journal of the Transportation Research Board, 2014, 2424(1): 58-65. doi: 10.3141/2424-07 [23] PARASURAMAN R, SHERIDAN T B, WICKENS C D. A model for types and levels of human interaction with automation[J]. IEEE Transactions on Systems, Man, and Cybernetics—Part A: Systems and Humans, 2000, 30(3): 286-297. doi: 10.1109/3468.844354 [24] Christoffersen K, Woods D D. How to make automated systems team players[M]//Advances in Human Performance and Cognitive Engineering Research. Bingley: Emerald Group Publishing Limited, 2002: 1-12. [25] United Nations Trade and Development. Technology and innovation report 2025: inclusive artificial intelligence for development[M]. Manhattan: United Nations, 2025. [26] DUAN L, CHEN F. The future of advanced driving assistance system development in China[C]//Proceedings of 2011 IEEE International Conference on Vehicular Electronics and Safety. Piscataway: IEEE, 2011: 238-243. [27] ERIKSSON A, STANTON N A. Takeover time in highly automated vehicles: noncritical transitions to and from manual control[J]. Human Factors, 2017, 59(4): 689-705. doi: 10.1177/0018720816685832 [28] MOLNAR L J, RYAN L H, PRADHAN A K, et al. Understanding trust and acceptance of automated vehicles: an exploratory simulator study of transfer of control between automated and manual driving[J]. Transportation Research Part F: Traffic Psychology and Behavior, 2018, 58: 319-328. doi: 10.1016/j.trf.2018.06.004 [29] FAGNANT D J, KOCKELMAN K. Preparing a nation for autonomous vehicles: opportunities, barriers and policy recommendations[J]. Transportation Research Part A: Policy and Practice, 2015, 77: 167-181. doi: 10.1016/j.tra.2015.04.003 [30] BIMBRAW K. Autonomous cars: Past, present and future a review of the developments in the last century, the present scenario and the expected future of autonomous vehicle technology[C]//2015 12th International Conference on Informatics in Control, Automation and Robotics (ICINCO). Piscataway: IEEE, 2015: 191-198. [31] JAUSSEIN M, LÉVÊQUE L, DENIEL J, et al. How do non-driving-related tasks affect engagement under highly automated driving situations? a literature review[J]. Frontiers in Future Transportation, 2021, 2: 687602. doi: 10.3389/ffutr.2021.687602 [32] BONNEFON J F, SHARIFF A, RAHWAN I. The social dilemma of autonomous vehicles[J]. Science, 2016, 352(6293): 1573-1576. doi: 10.1126/science.aaf2654 [33] HABOUCHA C J, ISHAQ R, SHIFTAN Y. User preferences regarding autonomous vehicles[J]. Transportation Research Part C: Emerging Technologies, 2017, 78: 37-49. doi: 10.1016/j.trc.2017.01.010 [34] LI S, ZHANG Y, EDWARDS S, et al. Exploration into the needs and requirements of the remote driver when teleoperating the 5G-enabled level 4 automated vehicle in the real world: a case study of 5G connected and automated logistics[J]. Sensors, 2023, 23(2): 820. doi: 10.3390/s23020820 [35] O’NEILL T, MCNEESE N, BARRON A, et al. Human–autonomy teaming: a review and analysis of the empirical literature[J]. Human Factors, 2022, 64(5): 904-938. doi: 10.1177/0018720820960865 [36] BELLAMY R K E, ANDRIST S, BICKMORE T, et al. Human-agent collaboration: can an agent be a partner? [C]//Proceedings of the 2017 CHI Conference Extended Abstracts on Human Factors in Computing Systems. New York: ACM, 2017: 1289-1294. [37] FAVARÒ F M, NADER N, EURICH S O, et al. Examining accident reports involving autonomous vehicles in California[J]. PLoS One, 2017, 12(9): e0184952. doi: 10.1371/journal.pone.0184952 [38] CHEN J Y C, LAKHMANI S G, STOWERS K, et al. Situation awareness-based agent transparency and human-autonomy teaming effectiveness[J]. Theoretical Issues in Ergonomics Science, 2018, 19(3): 259-282. doi: 10.1080/1463922X.2017.1315750 [39] JAROSCH O, KUHNT M, PARADIES S, et al. It’s out of our hands now! effects of non-driving related tasks during highly automated driving on drivers’ fatigue[C]//Driving Assessment Conference Archive. Iowa City: University of Iowa Libraries Publishing, 2017: 319-325. [40] RADLMAYR J, GOLD C, LORENZ L, et al. How traffic situations and non-driving related tasks affect the take-over quality in highly automated driving[J]. Proceedings of the Human Factors and Ergonomics Society Annual Meeting, 2014, 58(1): 2063-2067. doi: 10.1177/1541931214581434 [41] 刘晓波, 鲁工圆, 郑芳芳, 等. 自动驾驶交通系统的协同管控技术[J]. 科学通报, 2020, 65(6): 434-441. doi: 10.1360/TB-2019-0526LIU Xiaobo, LU Gongyuan, ZHENG Fangfang, et al. Coordinated management and control of autonomous traffic systems[J]. Chinese Science Bulletin, 2020, 65(6): 434-441. doi: 10.1360/TB-2019-0526 [42] YAN Y C, JIA Y Y. A review on human comfort factors, measurements, and improvements in human–robot collaboration[J]. Sensors, 2022, 22(19): 7431. doi: 10.3390/s22197431 [43] BRADSHAW J M, DIGNUM V, JONKER C, et al. Human-agent-robot teamwork[J]. IEEE Intelligent Systems, 2012, 27(2): 8-13. doi: 10.1109/MIS.2012.37 [44] GOODRICH M A, COLTON M, BRINTON B, et al. Incorporating a robot into an autism therapy team[J]. IEEE Intelligent Systems, 2012, 27(2): 52-59. doi: 10.1109/MIS.2012.40 [45] KLIEN G, WOODS D D, BRADSHAW J M, et al. Ten challenges for making automation a “team player” in joint human-agent activity[J]. IEEE Intelligent Systems, 2004, 19(6): 91-95. doi: 10.1109/MIS.2004.74 [46] MOSIER K L, FISCHER U, BURIAN B K, et al. Autonomous, context-sensitive, task management systems and decision support tools I: human-autonomy teaming fundamentals and state of the art[M]. Washington D.C.: NASA, 2017. [47] JOE J C, O’HARA J M, MEDEMA H D, et al. Identifying requirements for effective human-automation teamwork[R]. Idaho Falls: Idaho National Lab, 2014. [48] AZEVEDO C R B, RAIZER K, SOUZA R. A vision for human-machine mutual understanding, trust establishment, and collaboration[C]//2017 IEEE Conference on Cognitive and Computational Aspects of Situation Management (CogSIMA). Piscataway: IEEE, 2017: 1-3. [49] SCHAEFER K E, STRAUB E R, CHEN J Y C, et al. Communicating intent to develop shared situation awareness and engender trust in human-agent teams[J]. Cognitive Systems Research, 2017, 46: 26-39. doi: 10.1016/j.cogsys.2017.02.002 [50] PETERMEIJER S M, ABBINK D A, MULDER M, et al. The effect of haptic support systems on driver performance: a literature survey[J]. IEEE Transactions on Haptics, 2015, 8(4): 467-479. doi: 10.1109/TOH.2015.2437871 [51] WANG W S, NA X X, CAO D P, et al. Decision-making in driver-automation shared control: a review and perspectives[J]. IEEE/CAA Journal of Automatica Sinica, 2020, 7(5): 1289-1307. doi: 10.1109/jas.2020.1003294 [52] XING Y, LV C, CAO D P, et al. Toward human-vehicle collaboration: Review and perspectives on human-centered collaborative automated driving[J]. Transportation Research Part C: Emerging Technologies, 2021, 128: 103199. doi: 10.1016/j.trc.2021.103199 [53] FRIDMAN L. Human-centered autonomous vehicle systems: principles of effective shared autonomy [EB/OL]. (2018-10-03)[2026-01-15]. https://arxiv.org/abs/1810.01835. [54] KUKKALA V K, TUNNELL J, PASRICHA S, et al. Advanced driver-assistance systems: a path toward autonomous vehicles[J]. IEEE Consumer Electronics Magazine, 2018, 7(5): 18-25. doi: 10.1109/MCE.2018.2828440 [55] RUPP J D, KING A G. Autonomous Vehicles for Safer Driving [M]. Pennsylvania: SAE, 2010. [56] OMEIZA D, WEBB H, JIROTKA M, et al. Explanations in autonomous driving: a survey[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(8): 10142-10162. doi: 10.1109/TITS.2021.3122865 [57] ADNAN N, MDNORDIN S, BIN BAHRUDDIN M A, et al. How trust can drive forward the user acceptance to the technology? in-vehicle technology for autonomous vehicle[J]. Transportation Research Part A: Policy and Practice, 2018, 118: 819-836. doi: 10.1016/j.tra.2018.10.019 [58] 高在峰, 李文敏, 梁佳文, 等. 自动驾驶车中的人机信任[J]. 心理科学进展, 2021, 29(12): 2172-2183. doi: 10.3724/SP.J.1042.2021.02172GAO Zaifeng, LI Wenmin, LIANG Jiawen, et al. Trust in automated vehicles[J]. Advances in Psychological Science, 2021, 29(12): 2172-2183. doi: 10.3724/SP.J.1042.2021.02172 [59] 孙晓枫, 赵莹, 吕春梅. 自动驾驶汽车人机交互信任影响机制[J]. 东北大学学报(自然科学版), 2022, 43(9): 1305-1313. doi: 10.12068/j.issn.1005-3026.2022.09.013SUN Xiaofeng, ZHAO Ying, LU Chunmei. Influencing mechanism of human-computer interaction trust in autonomous vehicles[J]. Journal of Northeastern University (Natural Science), 2022, 43(9): 1305-1313. doi: 10.12068/j.issn.1005-3026.2022.09.013 [60] 董文莉, 方卫宁. 自动化信任的研究综述与展望[J]. 自动化学报, 2021, 47(6): 1183-1200. doi: 10.16383/j.aas.c200432DONG Wenli, FANG Weining. Trust in automation: research review and future perspectives[J]. Acta Automatica Sinica, 2021, 47(6): 1183-1200. doi: 10.16383/j.aas.c200432 [61] LEWIS J D, WEIGERT A J. The social dynamics of trust: theoretical and empirical research, 1985-2012[J]. Social Forces, 2012, 91(1): 25-31. doi: 10.1093/sf/sos116 [62] OLAVERRI-MONREAL C. Promoting trust in self-driving vehicles[J]. Nature Electronics, 2020, 3(6): 292-294. doi: 10.1038/s41928-020-0434-8 [63] CHOI J K, JI Y G. Investigating the importance of trust on adopting an autonomous vehicle[J]. International Journal of Human–Computer Interaction, 2015, 31(10): 692-702. doi: 10.1080/10447318.2015.1070549 [64] DIKMEN M, BURNS C. Trust in autonomous vehicles: The case of Tesla Autopilot and Summon[C]//2017 IEEE International Conference on Systems, Man, and Cybernetics (SMC). Piscataway: IEEE, 2017: 1093-1098. [65] LEE J D, SEE K A. Trust in automation: designing for appropriate reliance[J]. Human Factors, 2004, 46(1): 50-80. doi: 10.1518/hfes.46.1.50.30392 [66] HASPIEL J, DU N, MEYERSON J, et al. Explanations and expectations: trust building in automated vehicles[C]//Companion of the 2018 ACM/IEEE International Conference on Human-Robot Interaction. New York: ACM, 2018: 119-120. [67] MIRNIG A G, WINTERSBERGER P, SUTTER C, et al. A framework for analyzing and calibrating trust in automated vehicles[C]//Proceedings of the 8th International Conference on Automotive User Interfaces and Interactive Vehicular Applications. Ann New York: ACM, 2016: 33-38. [68] LEE J D, MORAY N. Trust, self-confidence, and operators' adaptation to automation[J]. International Journal of Human-Computer Studies, 1994, 40(1): 153-184. doi: 10.1006/ijhc.1994.1007 [69] BROWN B, LAURIER E. The trouble with autopilots: assisted and autonomous driving on the social road[C]//Proceedings of the 2017 CHI Conference on Human Factors in Computing Systems. New York: ACM, 2017: 416-429. [70] PARASURAMAN R, RILEY V. Humans and automation: use, misuse, disuse, abuse[J]. Human Factors, 1997, 39(2): 230-253. doi: 10.1518/001872097778543886 [71] ZHANG Q, ROBERT L, DU N, et al. Trust in AVs: The impact of expectations and individual differences[C]//Conference on Autonomous Vehicles in Society. Mississippi: [s. n.], 2018: 35291503. [72] 谭征宇, 张瑞佛, 刘芝孜, 等. 智能网联汽车人机交互信任研究现状与展望[J]. 机械工程学报, 2024, 60(10): 366-383. doi: 10.3901/JME.2024.10.366TAN Zhengyu, ZHANG Ruifo, LIU Zhizi, et al. Human machine interaction trustin intelligentand connected vehicles: overview and perspectives[J]. Journal of Mechanical Engineering, 2024, 60(10): 366-383. doi: 10.3901/JME.2024.10.366 [73] WU Chaozhong, WU Haoran, LYU Nengchao. Review of control switch and safety of human-computer driving intelligent vehicle[J]. Journal of Traffic and Transportation Engineering, 2018, 18(6): 131-141. [74] DE WAARD D, VAN DER HULST M, HOEDEMAEKER M, et al. Driver behavior in an emergency situation in the automated highway system[J]. Transportation Human Factors, 1999, 1(1): 67-82. doi: 10.1207/sthf0101_7 [75] FLEMISCH F, SCHIEBEN A, KELSCH J, et al. Automation spectrum, inner/outer compatibility and other potentially useful human factors concepts for assistance and automation[C]//Human Factors for Assistance and Automation. Cologne: DLR, 2008: 1-15. [76] PAYRE W, CESTAC J, DELHOMME P. Fully automated driving: impact of trust and practice on manual control recovery[J]. Human Factors, 2016, 58(2): 229-241. doi: 10.1177/0018720815612319 [77] HAYATI S, VENKATARAMAN S T. Design and implementation of a robot control system with traded and shared control capability[C]//Proceedings, 1989 International Conference on Robotics and Automation. Piscataway: IEEE, 2002: 1310-1315. [78] SIMPSON R C, LEVINE S P. Adaptive shared control of a smart wheelchair operated by voice control[C]//Proceedings of the 1997 IEEE/RSJ International Conference on Intelligent Robot and Systems. Piscataway: IEEE, 2002: 622-626. [79] STEELE M, GILLESPIE R B. Shared control between human and machine: using a haptic steering wheel to aid in land vehicle guidance[J]. Proceedings of the Human Factors and Ergonomics Society Annual Meeting, 2001, 45(23): 1671-1675. doi: 10.1177/154193120104502323 [80] CORBALAN G, KESTER L, VAN MERRIËNBOER J J G. Selecting learning tasks: Effects of adaptation and shared control on learning efficiency and task involvement[J]. Contemporary Educational Psychology, 2008, 33(4): 733-756. doi: 10.1016/j.cedpsych.2008.02.003 [81] 杨俊儒, 褚端峰, 陆丽萍, 等. 智能汽车人机共享控制研究综述[J]. 机械工程学报, 2022, 58(18): 31-55.YANG Junru, CHU Duanfeng, LU Liping, et al. Review on human-machine shared control of intelligent vehicles[J]. Journal of Mechanical Engineering, 2022, 58(18): 31-55. [82] MULDER M, ABBINK D A, VAN PAASSEN M M, et al. Design of a haptic gas pedal for active car-following support[J]. IEEE Transactions on Intelligent Transportation Systems, 2011, 12(1): 268-279. doi: 10.1109/TITS.2010.2091407 [83] MULDER M, ABBINK D A, BOER E R. Sharing control with haptics: Seamless driver support from manual to automatic control[J]. Human Factors, 2012, 54(5): 786-798. [84] VAN PAASSEN M M R, BOINK R P, ABBINK D A, et al. Four design choices for haptic shared control[M]. Advances in Aviation Psychology, Volume 2. London: Routledge, 2017. [85] 黄炜, 黄起鹏. 人机共驾控制架构与驾驶权决策研究综述[J]. 交通运输工程学报, 2025, 25(1): 48-65. doi: 10.19818/j.cnki.1671-1637.2025.01.004HUANG Wei, HUANG Qipeng. Research review of control architecture and driving authority decision-making of driver-automation cooperative driving[J]. Journal of Traffic and Transportation Engineering, 2025, 25(1): 48-65. doi: 10.19818/j.cnki.1671-1637.2025.01.004 [86] 程洪, 黄瑞, 邱静, 等. 人机智能技术及系统研究进展综述[J]. 智能系统学报, 2020, 15(2): 386-398.CHENG Hong, HUANG Rui, QIU Jing, et al. A survey of recent advances in human-robot intelligent systems[J]. CAAI Transactions on Intelligent Systems, 2020, 15(2): 386-398. [87] ABBINK D A, CARLSON T, MULDER M, et al. A topology of shared control systems: finding common ground in diversity[J]. IEEE Transactions on Human-Machine Systems, 2018, 48(5): 509-525. doi: 10.1109/THMS.2018.2791570 [88] NA X X, COLE D J. Game-theoretic modeling of the steering interaction between a human driver and a vehicle collision avoidance controller[J]. IEEE Transactions on Human-Machine Systems, 2015, 45(1): 25-38. doi: 10.1109/THMS.2014.2363124 [89] JI X W, YANG K M, NA X X, et al. Shared steering torque control for lane change assistance: a stochastic game-theoretic approach[J]. IEEE Transactions on Industrial Electronics, 2019, 66(4): 3093-3105. doi: 10.1109/TIE.2018.2844784 [90] FLAD M, FRÖHLICH L, HOHMANN S. Cooperative shared control driver assistance systems based on motion primitives and differential games[J]. IEEE Transactions on Human-Machine Systems, 2017, 47(5): 711-722. doi: 10.1109/THMS.2017.2700435 [91] WANG Z, ZHENG R C, KAIZUKA T, et al. Driver-automation shared control: modeling driver behavior by taking account of reliance on haptic guidance steering[C]//2018 IEEE Intelligent Vehicles Symposium (IV). Piscataway: IEEE, 2018: 144-149. [92] ERLIEN S M, FUJITA S, GERDES J C. Shared steering control using safe envelopes for obstacle avoidance and vehicle stability[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(2): 441-451. doi: 10.1109/TITS.2015.2453404 [93] BENLOUCIF M A, SENTOUH C, FLORIS J, et al. Online adaptation of the Level of Haptic Authority in a lane keeping system considering the driver’s state[J]. Transportation Research Part F: Traffic Psychology and Behaviour, 2019, 61: 107-119. doi: 10.1016/j.trf.2017.08.013 [94] GUO C S, SENTOUH C, POPIEUL J C, et al. Shared control framework applied for vehicle longitudinal control in highway merging scenarios[C]//2015 IEEE International Conference on Systems, Man, and Cybernetics. Piscataway: IEEE, 2016: 3098-3103. [95] ABBINK D A, MULDER M, VAN DER HELM F C T, et al. Measuring neuromuscular control dynamics during car following with continuous haptic feedback[J]. IEEE Transactions on Systems, Man, and Cybernetics, Part B (Cybernetics), 2011, 41(5): 1239-1249. doi: 10.1109/TSMCB.2011.2120606 [96] LORENZ L, KERSCHBAUM P, SCHUMANN J. Designing take over scenarios for automated driving: How does augmented reality support the driver to get back into the loop?[J]. Proceedings of the Human Factors and Ergonomics Society Annual Meeting, 2014, 58(1): 1681-1685. doi: 10.1177/1541931214581351 [97] NAUJOKS F, PURUCKER C, NEUKUM A, et al. Controllability of Partially Automated Driving functions–Does it matter whether drivers are allowed to take their hands off the steering wheel?[J]. Transportation Research Part F: Traffic Psychology and Behaviour, 2015, 35: 185-198. doi: 10.1016/j.trf.2015.10.022 [98] LEES T, CHALMERS T, BURTON D, et al. Electroencephalography as a predictor of self-report fatigue/sleepiness during monotonous driving in train drivers[J]. Physiological Measurement, 2018, 39(10): 105012. doi: 10.1088/1361-6579/aae42e [99] 宗长富, 代昌华, 张东. 智能汽车的人机共驾技术研究现状和发展趋势[J]. 中国公路学报, 2021, 34(6): 214-237. doi: 10.3969/j.issn.1001-7372.2021.06.021ZONG Changfu, DAI Changhua, ZHANG Dong. Human-machine interaction technology of intelligent vehicles: current development trends and future directions[J]. China Journal of Highway and Transport, 2021, 34(6): 214-237. doi: 10.3969/j.issn.1001-7372.2021.06.021 [100] LOUW T, KOUNTOURIOTIS G, CARSTEN O, et al. Driver inattention during vehicle automation: how does driver engagement affect resumption of control [C]//Proceedings of 4th International Conference on Driver Distraction and Inattention (DDI2015). Sydney: ARRB Group, 2015: 1-13. [101] BANKS V A, STANTON N A. Analysis of driver roles: modelling the changing role of the driver in automated driving systems using EAST[J]. Theoretical Issues in Ergonomics Science, 2019, 20(3): 284-300. doi: 10.1080/1463922X.2017.1305465 [102] 薛晴婉, 徐嘉伟, 闫学东, 等. 雾天驾驶人车辆操纵行为特性及其与追尾风险相关性分析[J]. 交通信息与安全, 2022, 40(1): 19-27. doi: 10.3963/j.jssn.1674-4861.2022.01.003XUE Qingwan, XU Jiawei, YAN Xuedong, et al. A study on the correlation between vehicle control behaviors and rear-end collision risk under foggy conditions[J]. Journal of Transport Information and Safety, 2022, 40(1): 19-27. doi: 10.3963/j.jssn.1674-4861.2022.01.003 [103] BRANDENBURGER N, NAUMANN A. On track: a series of research about the effects of increasing railway automation on the train driver[J]. IFAC-PapersOnLine, 2019, 52(19): 288-293. doi: 10.1016/j.ifacol.2019.12.115 [104] 武彪, 任洪泽, 郑联庆, 等. 基于自然驾驶行为的智能驾驶复杂场景构建方法[J]. 华南理工大学学报(自然科学版), 2025, 53(2): 38-47.WU Biao, REN Hongzhe, ZHENG Lianqing, et al. Complex scenario construction method for navigation pilot based on natural driving behaviour[J]. Journal of South China University of Technology (Natural Science Edition), 2025, 53(2): 38-47. [105] ZEEB K, BUCHNER A, SCHRAUF M. Is take-over time all that matters? the impact of visual-cognitive load on driver take-over quality after conditionally automated driving[J]. Accident Analysis & Prevention, 2016, 92: 230-239. doi: 10.1016/j.aap.2016.04.002 [106] BRAUNAGEL C, ROSENSTIEL W, KASNECI E. Ready for take-over? a new driver assistance system for an automated classification of driver take-over readiness[J]. IEEE Intelligent Transportation Systems Magazine, 2017, 9(4): 10-22. doi: 10.1109/MITS.2017.2743165 [107] GOLD C, KÖRBER M, HOHENBERGER C, et al. Trust in automation—before and after the experience of take-over scenarios in a highly automated vehicle[J]. Procedia Manufacturing, 2015, 3: 3025-3032. doi: 10.1016/j.promfg.2015.07.847 [108] BANKS V A, ERIKSSON A, O’DONOGHUE J, et al. Is partially automated driving a bad idea? observations from an on-road study[J]. Applied Ergonomics, 2018, 68: 138-145. doi: 10.1016/j.apergo.2017.11.010 [109] TECHER F, OJEDA L, BARAT D, et al. Anger and highly automated driving in urban areas: The role of time pressure[J]. Transportation Research Part F: Traffic Psychology and Behaviour, 2019, 64: 353-360. doi: 10.1016/j.trf.2019.05.016 [110] YOON S H, JI Y G. Non-driving-related tasks, workload, and takeover performance in highly automated driving contexts[J]. Transportation Research Part F: Traffic Psychology and Behaviour, 2019, 60: 620-631. doi: 10.1016/j.trf.2018.11.015 [111] AYOUB J, ZHOU F, BAO S, et al. From manual driving to automated driving: a review of 10 years of AutoUI[C]//Proceedings of the 11th International Conference on Automotive User Interfaces and Interactive Vehicular Applications. Utrecht New York: ACM, 2019: 70-90. [112] CHEN J Y C, BARNES M J. Human–agent teaming for multirobot control: a review of human factors issues[J]. IEEE Transactions on Human-Machine Systems, 2014, 44(1): 13-29. doi: 10.1109/THMS.2013.2293535 [113] CARSTEN O, MARTENS M H. How can humans understand their automated cars? HMI principles, problems and solutions[J]. Cognition, Technology & Work, 2019, 21(1): 3-20. [114] ALONSO V, DE LA PUENTE P. System transparency in shared autonomy: a mini review[J]. Frontiers in Neurorobotics, 2018, 12: 83. doi: 10.3389/fnbot.2018.00083 [115] SCIUTTI A, MARA M, TAGLIASCO V, et al. Humanizing human-robot interaction: on the importance of mutual understanding[J]. IEEE Technology and Society Magazine, 2018, 37(1): 22-29. doi: 10.1109/MTS.2018.2795095 [116] HELLSTRÖM T, BENSCH S. Understandable robots-what, why, and how[J]. Journal of Behavioral Robotics, 2018, 9(1): 110-123. doi: 10.1515/pjbr-2018-0009 [117] 王文军, 李清坤, 曾超, 等. 自动驾驶接管绩效的影响因素、模型与评价方法综述[J]. 中国公路学报, 2023, 36(9): 202-224. doi: 10.19721/j.cnki.1001-7372.2023.09.017WANG Wenjun, LI Qingkun, ZENG Chao, et al. Review of take-over performance of automated driving: influencing factors, models, and evaluation methods[J]. China Journal of Highway and Transport, 2023, 36(9): 202-224. doi: 10.19721/j.cnki.1001-7372.2023.09.017 [118] LAKHMANI S G, WRIGHT J L, SCHWARTZ M R, et al. Exploring the effect of communication patterns and transparency on performance in a human-robot team[J]. Proceedings of the Human Factors and Ergonomics Society Annual Meeting, 2019, 63(1): 160-164. doi: 10.1177/1071181319631054 [119] ZHENG E L, JIN W N, HAMARNEH G, et al. From human-in-the-loop to human-in-power[J]. The American Journal of Bioethics, 2024, 24(9): 84-86. doi: 10.1080/15265161.2024.2377139 [120] O’MALLEY M K, GUPTA A, GEN M, et al. Shared control in haptic systems for performance enhancement and training[J]. Journal of Dynamic Systems, Measurement, and Control, 2006, 128(1): 75-85. doi: 10.1115/1.2168160 [121] CAPALLERA M, ANGELINI L, METEIER Q, et al. Human-vehicle interaction to support driver’s situation awareness in automated vehicles: a systematic review[J]. IEEE Transactions on Intelligent Vehicles, 2023, 8(3): 2551-2567. doi: 10.1109/TIV.2022.3200826 [122] YUN H N, YANG J H. Multimodal warning design for take-over request in conditionally automated driving[J]. European Transport Research Review, 2020, 12(1): 34. doi: 10.1186/s12544-020-00427-5 [123] DE CLERCQ K, DIETRICH A, NÚÑEZ VELASCO J P, et al. External human-machine interfaces on automated vehicles: effects on pedestrian crossing decisions[J]. Human Factors, 2019, 61(8): 1353-1370. doi: 10.1177/0018720819836343 [124] KUN A L, BOLL S, SCHMIDT A. Shifting gears: user interfaces in the age of autonomous driving[J]. IEEE Pervasive Computing, 2016, 15(1): 32-38. doi: 10.1109/MPRV.2016.14 [125] ATAKISHIYEV S, SALAMEH M, YAO H S, et al. Explainable artificial intelligence for autonomous driving: a comprehensive overview and field guide for future research directions[J]. IEEE Access, 2024, 12: 101603-101625. doi: 10.1109/ACCESS.2024.3431437 [126] RASTGOO M N, NAKISA B, MAIRE F, et al. Automatic driver stress level classification using multimodal deep learning[J]. Expert Systems with Applications, 2019, 138: 112793. doi: 10.1016/j.eswa.2019.07.010 [127] ZHANG L, GAO X B. Transfer adaptation learning: a decade survey[J]. IEEE Transactions on Neural Networks and Learning Systems, 2024, 35(1): 23-44. doi: 10.1109/TNNLS.2022.3183326 [128] HOFF K A, BASHIR M. Trust in automation: integrating empirical evidence on factors that influence trust[J]. Human Factors, 2015, 57(3): 407-434. doi: 10.1177/0018720814547570 [129] QI X W, LUO Y D, WU G Y, et al. Deep reinforcement learning enabled self-learning control for energy efficient driving[J]. Transportation Research Part C: Emerging Technologies, 2019, 99: 67-81. doi: 10.1016/j.trc.2018.12.018 [130] MELCHER V, RAUH S, DIEDERICHS F, et al. Take-over requests for automated driving[J]. Procedia Manufacturing, 2015, 3: 2867-2873. doi: 10.1016/j.promfg.2015.07.788 [131] PETERMEIJER S, BAZILINSKYY P, BENGLER K, et al. Take-over again: investigating multimodal and directional TORs to get the driver back into the loop[J]. Applied Ergonomics, 2017, 62: 204-215. doi: 10.1016/j.apergo.2017.02.023 [132] BENGLER K, RETTENMAIER M, FRITZ N, et al. From HMI to HMIs: towards an HMI framework for automated driving[J]. Information, 2020, 11(2): 61-78. doi: 10.3390/info11020061 [133] CHEN J Y, PROCCI K, BOYCE M W, et al. Situation awareness-based agent transparency: ARL-TR-6905 [R/OL]. 2014-01-03. https://www.researchgate.net/publication/264963346_Situation_Awareness-Based_Agent_Transparency. [134] CHROMIK M, BUTZ A. Human-XAI interaction: a review and design principles for explanation user interfaces[C]//Human-Computer Interaction–INTERACT 2021. Cham: Springer, 2021: 619-640. [135] EHSAN U, LIAO Q V, MULLER M, et al. Expanding explainability: towards social transparency in AI systems[C]//Proceedings of the 2021 CHI Conference on Human Factors in Computing Systems. New York: ACM, 2021: 1-19. [136] KUMAR A, RANA K, GUPTA R, et al. Human-centered AI for autonomous vehicles: a review of interaction strategies and technologies[C]//2024 3rd Edition of IEEE Delhi Section Flagship Conference (DELCON). Piscataway: IEEE, 2025: 1-6. -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 162
- HTML全文浏览量: 64
- PDF下载量: 50
- 被引次数: 0