

Virtual Measurement Methods for Magnetic Levitation Planar Motors Based on Digital Twin Technology
-
摘要:
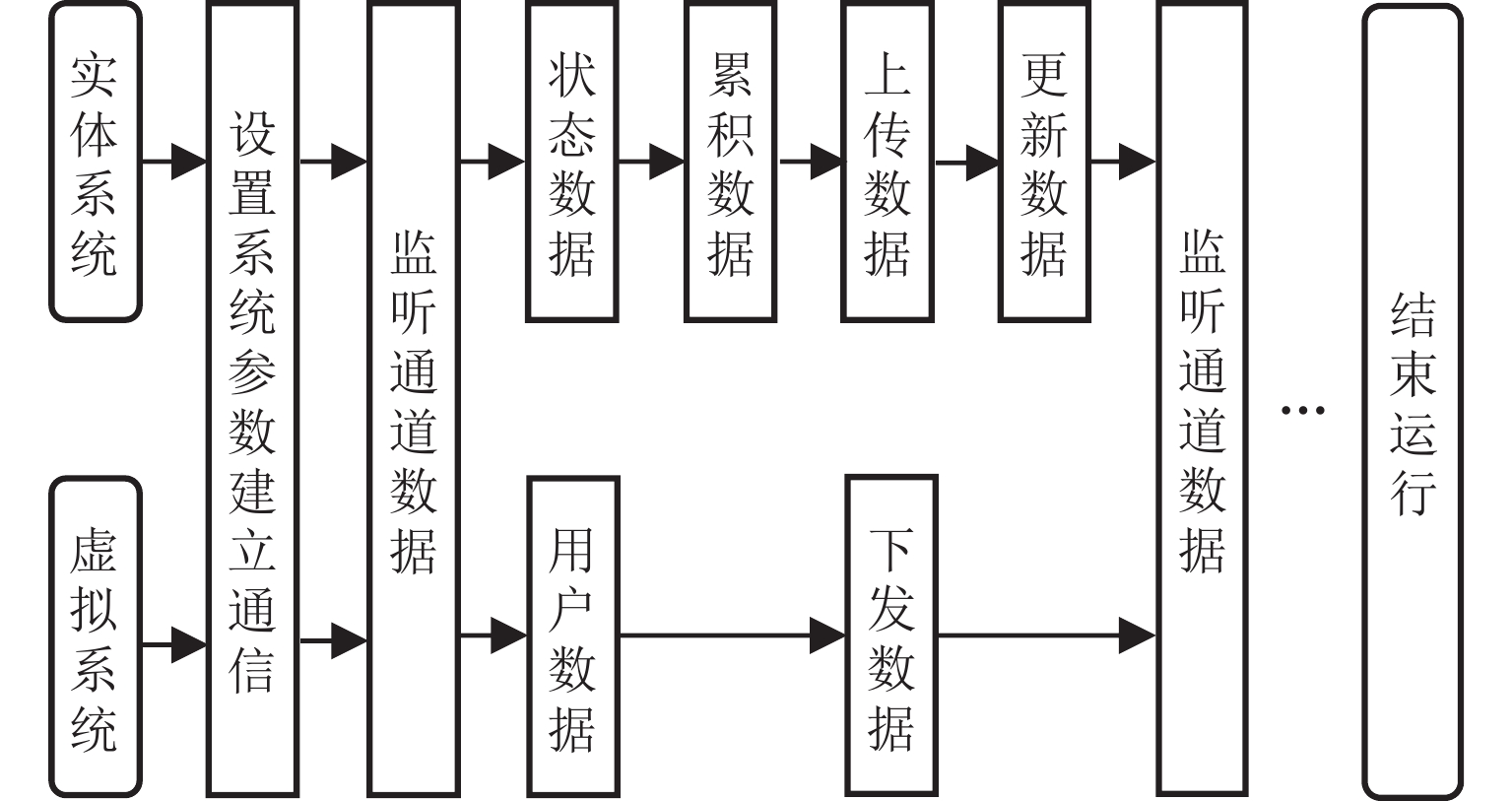
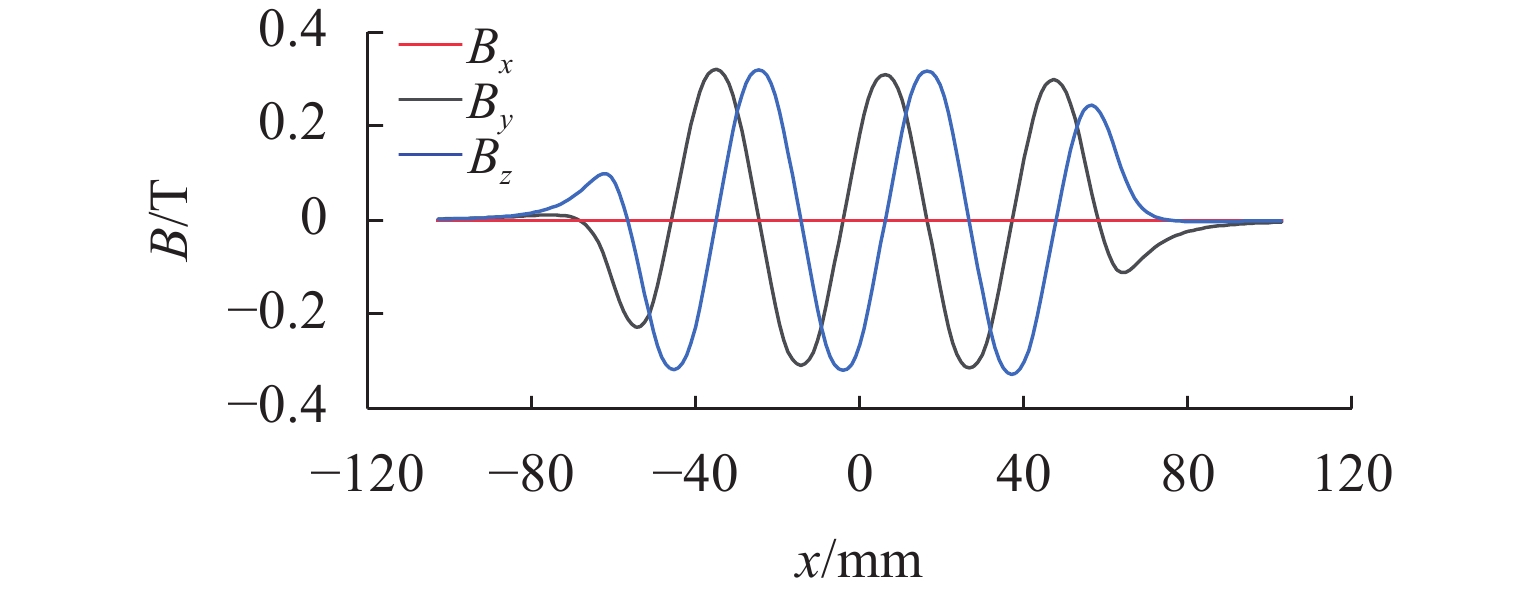
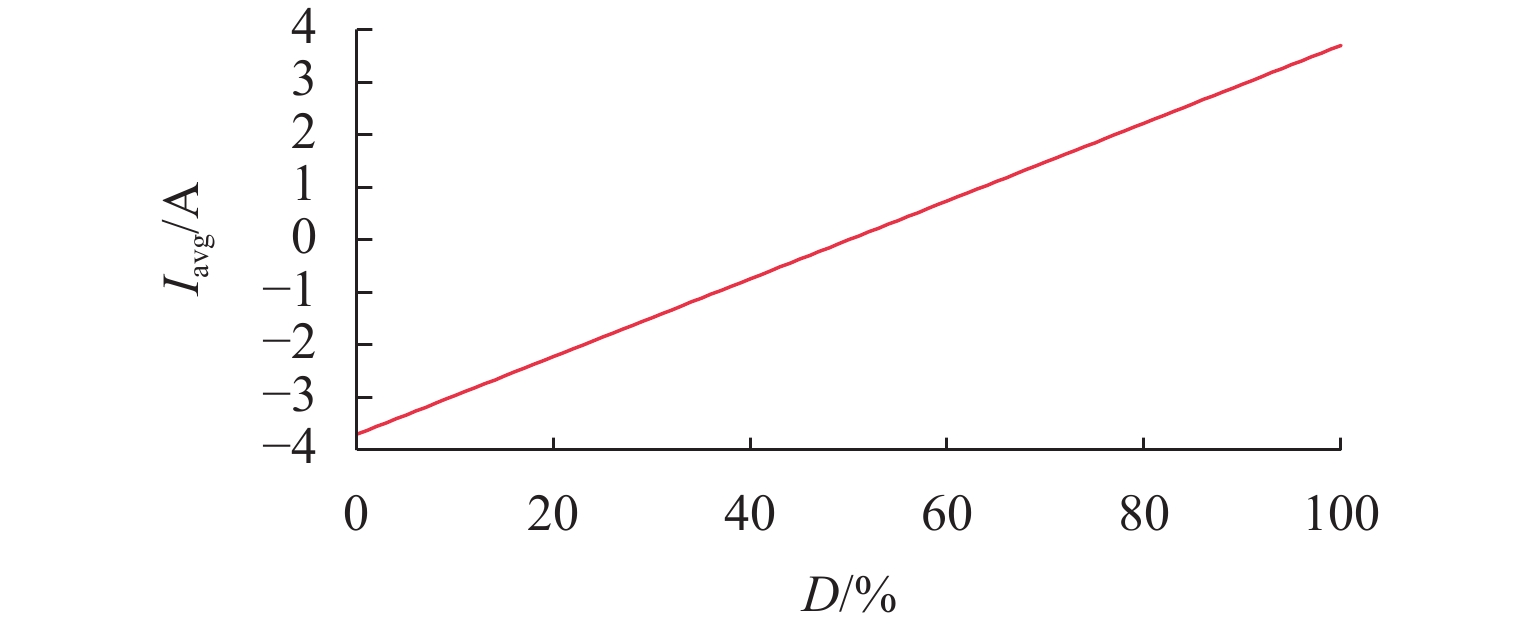
为实现对磁浮平面电机的状态实时监测并进行智能评测及辅助控制,本文构建了磁浮平面电机数字孪生系统. 首先,在磁浮平面电机和孪生模型间采用基于EtherNet/IP的通信方案,借助通信模块虚拟系统获取磁浮平面电机动子位置和控制量等实时关键状态数据,同时向实时控制系统发送相关数据;其次,磁浮平面电机采用NI PXIe-8880作为核心控制平台,采集位置传感器信号、位置解算、执行控制算法等对实时性较高任务,数字孪生系统基于PySide6开发图像用户界面且使用OpenGL图形库进行虚拟模型三维可视化,实现虚拟系统对磁浮平面电机的物理映射;最后,借助C++ 运算库,虚拟系统依据磁浮平面电机实时测量关键参数,获得对磁浮平面电机磁场强度、电流大小、线圈受力和运动状态的快速虚拟测量,满足对磁浮平面电机的实时可视化监测、智能评测、控制跟踪等要求. 研究结果显示:孪生模型对磁场、电流、线圈受力和线圈温度虚拟测量以及运动状态模拟均与实体磁浮平面电机接近,所构建的数字孪生系统可实现对磁浮平面电机的准确映射,该测量方法为磁悬浮平面电机的智能化控制与应用拓展提供了可行路径.
Abstract:To enable real-time monitoring, intelligent evaluation, and assisted control of the state of a magnetic levitation planar motor, a digital twin system for a magnetic levitation planar motor was constructed. The communication scheme based on EtherNet/IP was adopted between the magnetic levitation planar motor and its twin model; the real-time key state data of the magnetic levitation planar motor, such as mover position and control outputs, was acquired by means of a virtual system of communication module; the relevant information was sent to the real-time control system. The magnetic levitation planar motor employed an NI PXIe-8880 as the core control platform, performing high-real-time tasks including position-sensor signal acquisition, position computation, and execution of control algorithms. The digital twin system implemented a graphical user interface by using PySide6 and employed the OpenGL graphics library for three-dimensional visualization of the virtual model, enabling a physical mapping of the virtual system to the motor. Ultimately, by using C ++ computational libraries, the virtual system performed rapid virtual measurement of the motor’s magnetic field intensity, current magnitude, coil force, and motion states based on measurable real-time key parameters of the motor, thereby supporting real-time visualization monitoring, intelligent evaluation, control tracking, and other requirements for the motor. Research results show that the twin model’s virtual measurements of magnetic fields, currents, coil forces, and coil temperature, together with its motion state simulation, closely match those of the physical motor. The proposed digital twin system offers an accurate mapping of the magnetic levitation planar motor, and its measurement approach provides a feasible pathway for intelligent control and expanded applications of the motor.
-
Key words:
- magnetic levitation planar motor /
- digital twin /
- virtual measurement
-
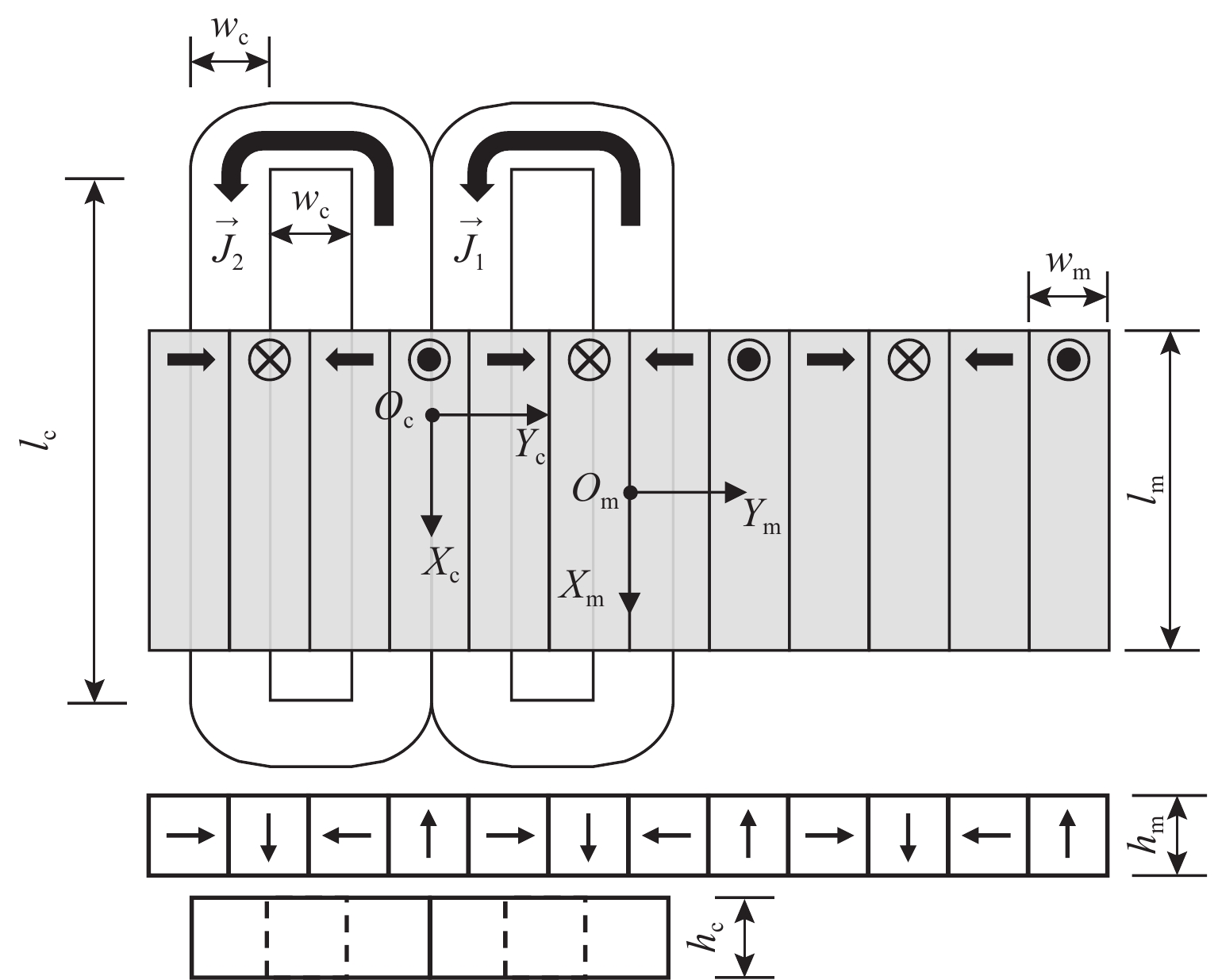
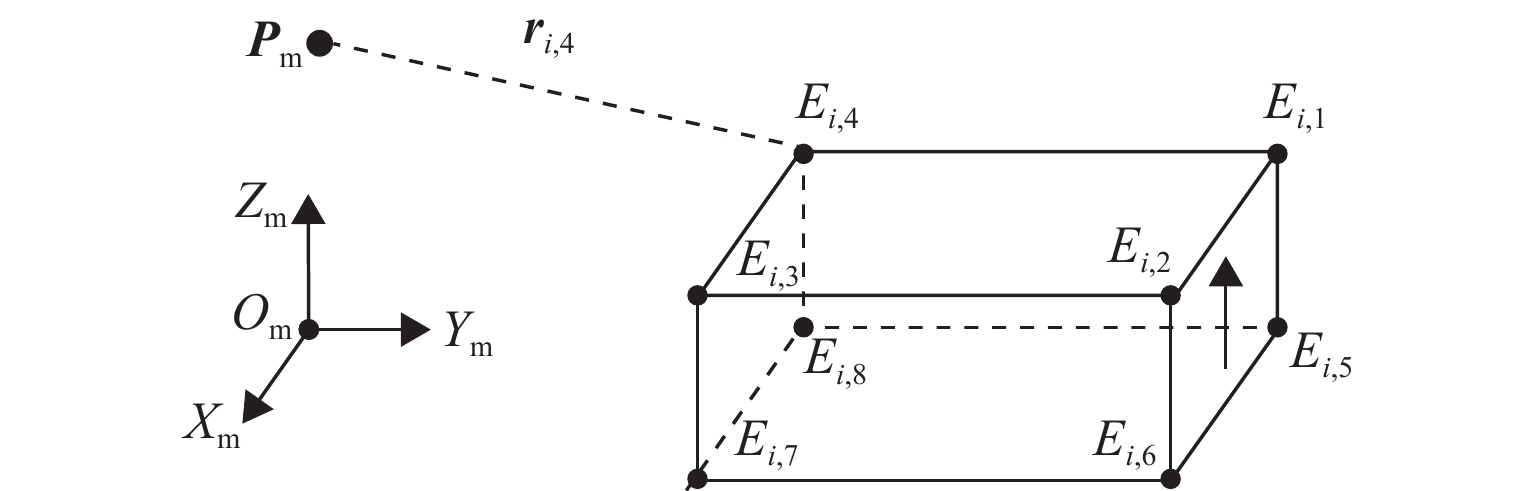
图 4 动磁式磁浮平面电机结构
Figure 4. Structure of magnetic levitation planar motor with moving magnets
表 1 磁浮平面电机主要参数
Table 1. Key parameters of magnetically levitated planar motor
基本参数 数值 永磁体长度 lm/mm 40 永磁体宽度 wm/mm 10 永磁体高度 hm/mm 10 剩余磁化强度 Br/T 1.2 线圈长度 lc/mm 120 线圈宽度 wc/mm 10 线圈高度 hc/mm 10 线圈匝数 Nc/匝 200  下载: 导出CSV
下载: 导出CSV
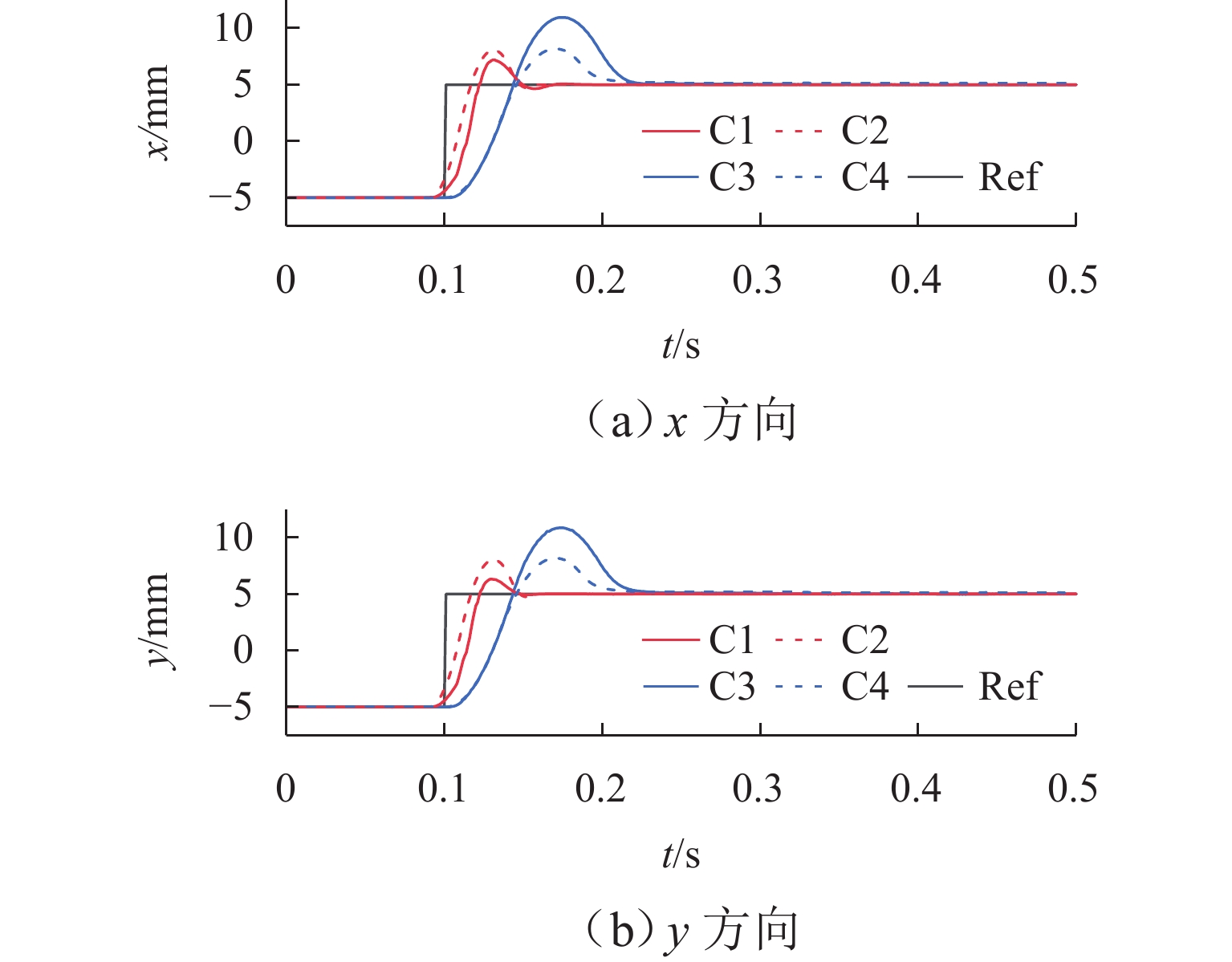
表 2 阶跃响应性能参数
Table 2. Step response performance parameters
类别 上升时间/ms 稳定时间/ms 超调量/% x 方向 y 方向 x 方向 y 方向 x 方向 y 方向 C1 22 22 63 44 21.99 13.17 C2 20 20 54 53 30.63 30.41 C3 31 31 119 127 59.54 58.68 C4 33 33 114 117 38.80 38.07
下载: 导出CSV
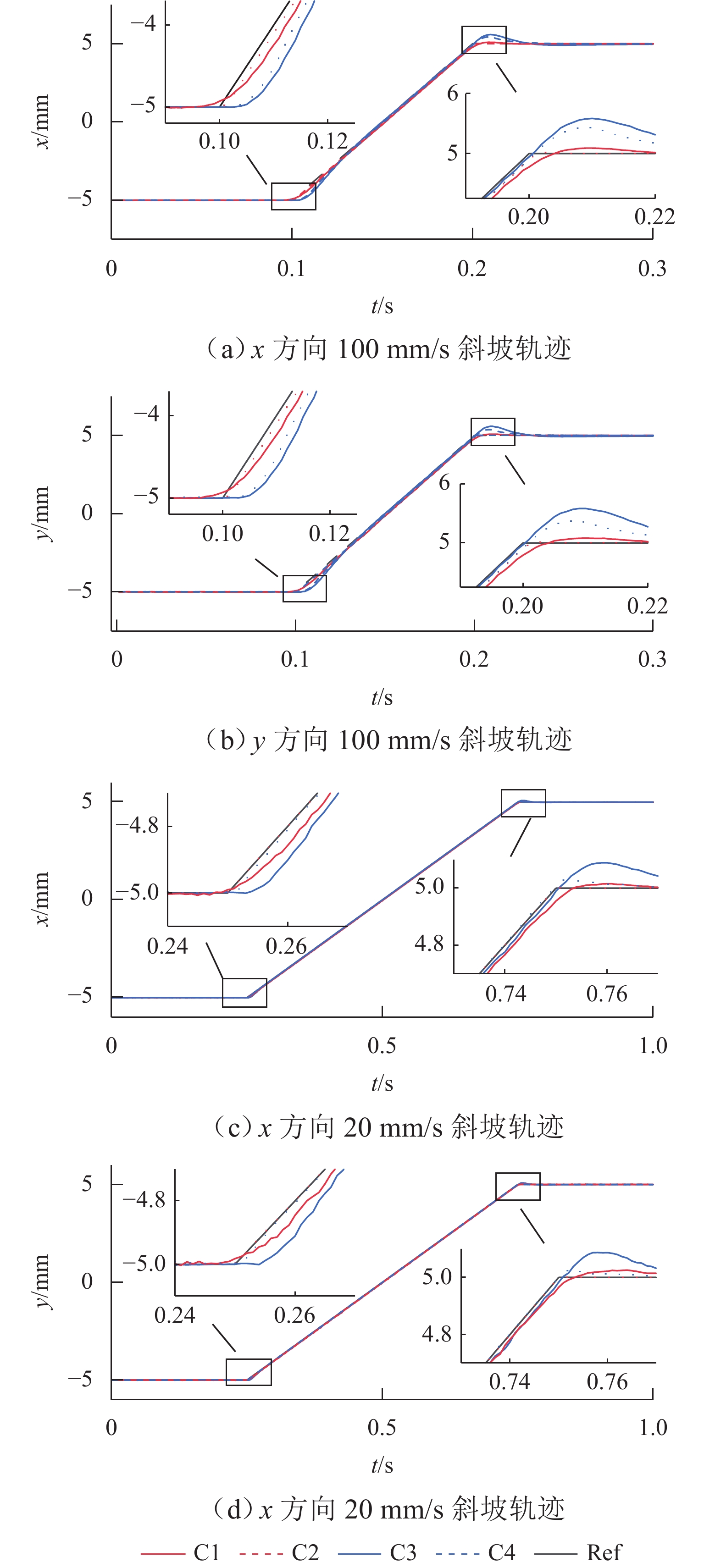
表 3 斜坡跟踪性能参数
Table 3. Slope tracking performance parameters
速度/
(mm·
s−1)100 20 x 方向 y 方向 x 方向 y 方向 $ {e}_{{\mathrm{rms}}} $ $ {e}_{{\mathrm{max}}} $ $ {e}_{{\mathrm{rms}}} $ $ {e}_{{\mathrm{max}}} $ $ {e}_{{\mathrm{rms}}} $ $ {e}_{{\mathrm{max}}} $ $ {e}_{{\mathrm{rms}}} $ $ {e}_{{\mathrm{max}}} $ C1 98.90 256.88 95.02 242.71 25.28 58.27 20.71 60.48 C2 57.83 117.33 57.83 115.35 0.77 2.49 0.71 3.45 C3 57.76 256.88 98.90 639.02 19.58 103.50 18.86 111.08 C4 143.70 531.30 57.83 522.90 4.72 32.94 4.01 25.05
下载: 导出CSV
-
[1] 巩亚东, 高家浩, 金丽雅, 等. 智能制造技术进展与应用[J]. 东北大学学报(自然科学版), 2025, 46(7): 84-93. doi: 10.12068/j.issn.1005-3026.2025.20250053Gong Yadong, Gao Jiahao, Jin Liya, et al. Progress and application of intelligent manufacturing technology[J]. Journal of Northeastern University (Natural Science), 2025, 46(7): 84-93. doi: 10.12068/j.issn.1005-3026.2025.20250053 [2] Wang T X, Tan C, Huang L, et al. Simplexity testbed: a model-based digital twin testbed[J]. Computers in Industry, 2023, 145: 103804. doi: 10.1016/j.compind.2022.103804 [3] Zorchenko N V, Tyupina T G, Parshutin M E. Technologies used by general electric to create digital twins for energy industry[J]. Power Technology and Engineering, 2024, 58(3): 521-526. [4] Erol T, Mendi A F, Dogan D. Digital transformation revolution with digital twin technology[C]//2020 4th International Symposium on Multidisciplinary Studies and Innovative Technologies (ISMSIT). Istanbul: IEEE, 2020: 1-7. [5] Aydemir H, Zengin U, Durak U. The digital twin paradigm for aircraft review and outlook[C]//AIAA Scitech 2020 Forum. Orlando, FL. Virginia: AIAA, 2020: 0553. [6] Ye J H, Zhan P F, Zeng J C, et al. Concise magnetic force model for Halbach-type magnet arrays and its application in permanent magnetic guideway optimization[J]. Journal of Magnetism and Magnetic Materials, 2023, 587: 171301. doi: 10.1016/j.jmmm.2023.171301 [7] Zheng J X, Zou C L, Liu X F, et al. Development of high current density, compactness NbTi superconducting coil for the maglev system[J]. IEEE Transactions on Applied Superconductivity, 2023, 33(1): 4900205. doi: 10.1109/tasc.2022.3224615 [8] Zhou S, Shi Y, Zou M L, et al. Tracking error suppression of maglev planar actuator with FPGA-based MPC[J]. IEEE Transactions on Instrumentation and Measurement, 2025, 74: 2008711. doi: 10.1109/tim.2025.3561376 [9] 徐逢秋, 邱熠, 何加文, 等. 基于数字孪生模型的磁浮平面电机剩磁补偿[J]. 西南交通大学学报, 2025, 60(4): 1050-1059.Xu Fengqiu, Qiu Yi, He Jiawen, et al. Remanence compensation of maglev planar motor based on digital twin model[J]. Journal of Southwest Jiaotong University, 2025, 60(4): 1050-1059. [10] Xu F Q, Lu X, Zheng T, et al. Motion control of a magnetic levitation actuator based on a wrench model considering yaw angle[J]. IEEE Transactions on Industrial Electronics, 2020, 67(10): 8545-8554. doi: 10.1109/TIE.2019.2949519 [11] Hu W J, Zhou Y H, Zhang Z L, et al. Model predictive control for hybrid levitation systems of maglev trains with state constraints[J]. IEEE Transactions on Vehicular Technology, 2021, 70(10): 9972-9985. doi: 10.1109/TVT.2021.3110133 [12] 卢静, 马卫华, 李苗, 等. 永磁磁浮转向架的运动解耦与动力学响应[J]. 西南交通大学学报, 2025, 60(4): 930-943. doi: 10.3969/j.issn.0258-2724.20250162Lu Jing, Ma Weihua, Li Miao, et al. Motion decoupling and dynamic response of permanent magnet maglev bogie[J]. Journal of Southwest Jiaotong University, 2025, 60(4): 930-943. doi: 10.3969/j.issn.0258-2724.20250162 [13] 林融. 过程自动化领域数字通信技术的应用与展望[J]. 自动化仪表, 2022, 43(1): 1-8, 14. doi: 10.16086/j.cnki.issn1000-0380.2021090073Lin Rong. Applications and prospectives of digital communication technology in process automation[J]. Process Automation Instrumentation, 2022, 43(1): 1-8,14. doi: 10.16086/j.cnki.issn1000-0380.2021090073 [14] Brooks P. Ethernet/IP-industrial protocol[C]//ETFA 2001. 8th International Conference on Emerging Technologies and Factory Automation. Proceedings. Piscataway: IEEE, 2001, 2: 505-514. [15] Parziale L, Liu W, Matthews C, et al. TCP/IP tutorial and technical overview[M]. Armonk: IBM Redbooks, 2006. [16] Liu Z, Stichel S, Berg M. Overview of technology and development of maglev and hyperloop systems[R]. Sweden: KTH Royal Institute of Technology, 2022: 60. [17] Jansen J W, Van Lierop C M M, Lomonova E A, et al. Magnetically levitated planar actuator with moving magnets[J]. IEEE Transactions on Industry Applications, 2008, 44(4): 1108-1115. doi: 10.1109/TIA.2008.926065 [18] Barata J C A, Hussein M S. The moore–penrose pseudoinverse: a tutorial review of the theory[J]. Brazilian Journal of Physics, 2012, 42(1): 146-165. doi: 10.1007/s13538-011-0052-z [19] Ding S S, Eberhard P, Schneider G, et al. Development of new electromagnetic suspension–based high-speed Maglev vehicles in China: Historical and recent progress in the field of dynamical simulation[J]. International Journal of Mechanical System Dynamics, 2023, 3(2): 97-118. doi: 10.1002/msd2.12069 [20] Smeets J P C, Overboom T T, Jansen J W, et al. Three-dimensional analytical modeling technique of electromagnetic fields of air-cored coils surrounded by different ferromagnetic boundaries[J]. IEEE Transactions on Magnetics, 2013, 49(12): 5698-5708. doi: 10.1109/TMAG.2013.2278528 [21] Bancel F. Magnetic[J]. Journal of Physics D: Applied Physics, 1999, 32(17): 2155. [22] Xu F Q, Dinavahi V, Xu X Z. Parallel computation of wrench model for commutated magnetically levitated planar actuator[J]. IEEE Transactions on Industrial Electronics, 2016, 63(12): 7621-7631. doi: 10.1109/TIE.2016.2592866 [23] He J W, Qiu Y, Xx F Q, et al. Fast and accurate thermal model for magnetic levitation actuators driven by PCB coils[J]. Measurement, 2026, 258: 118956. doi: 10.1016/j.measurement.2025.118956 [24] Duong T Q, Van Huynh D, Khosravirad S R, et al. From digital twin to metaverse: the role of 6G ultra-reliable and low-latency communications with multi-tier computing[J]. IEEE Wireless Communications, 2023, 30(3): 140-146. doi: 10.1109/MWC.014.2200371 [25] Xu F Q, Shi Y, Zhang K Y, et al. Real-time application of robust offset-free MPC in maglev planar machine[J]. IEEE Transactions on Industrial Electronics, 2023, 70(6): 6121-6130. doi: 10.1109/TIE.2022.3199864 -

 下载:
下载:


 点击查看大图
点击查看大图

计量
- 文章访问数: 55
- HTML全文浏览量: 36
- PDF下载量: 9
- 被引次数: 0