

Cascaded Displacement-Flux Density Control for Electromagnetic Thrust Bearing Based on Coupled Stiffness
-
摘要:
电磁推力轴承的高精度控制可以提高分拣机械臂或协作机器人辅助关节的协调性和稳定性,级联控制系统下磁密反馈控制被认为是一种解决高频应用的有效办法,但目前很少有合适的微型霍尔传感器能精确采集气隙的实时磁密. 为解决高频工况下传统磁密估计精度不足的问题,首先,对考虑涡流、漏磁和边缘效应的等效磁阻模型进行有理近似;其次,基于耦合刚度并结合有效电感的涡流补偿模型,设计一种以可测量位移和电流共同作为输入信号的磁密观测器,在外回路中设计考虑动态刚度的PID控制器以补偿磁密滞后,并重构磁密内部控制回路;最后,建立电磁推力轴承的级联位移-磁密控制回路,并进行验证. 结果表明,相较于电流控制策略,该磁密反馈控制方法能够将电磁推力轴承系统的增益裕度提升至35 dB,相位裕度稳定在50°以上,扩展控制带宽至400 Hz;在电流控制失稳时,该磁密反馈控制能抑制过冲在41.2%以下,并在不同参数的阶跃响应和方波跟踪测试中表现出更小的超调量和更快的稳定速度.
Abstract:High-precision control of electromagnetic thrust bearings can enhance the coordination and stability of sorting robotic arms or auxiliary joints in collaborative robots. Flux density feedback control under cascaded control systems is recognized as an effective solution for high-frequency applications; however, there are currently few suitable miniature Hall sensors capable of accurately capturing the real-time magnetic flux density of the air gap. To address the problem of insufficient accuracy in traditional flux density estimation under high-frequency operating conditions, first, a rational approximation of an equivalent reluctance model considering eddy current, magnetic leakage, and edge effects was performed. Secondly, based on the coupled stiffness and an eddy current compensation model incorporating effective inductance, a flux density observer using measurable displacement and current as joint input signals was designed. In the outer loop, a PID controller considering dynamic stiffness was designed to compensate for flux density hysteresis, and the internal flux density control loop was reconstructed. Finally, a cascaded displacement-flux density control loop for the electromagnetic thrust bearing was eXstablished and validated. The results indicate that compared to the current control strategy, the flux density feedback control method can increase the gain margin of the electromagnetic thrust bearing system to 35 dB, maintain the phase margin above 50°, and extend the control bandwidth to 400 Hz. When the current control becomes unstable, the flux density feedback control can suppress the overshoot to below 41.2%, and it demonstrates a smaller overshoot and a faster settling speed in step responses under different parameters and square-wave tracking tests.
-
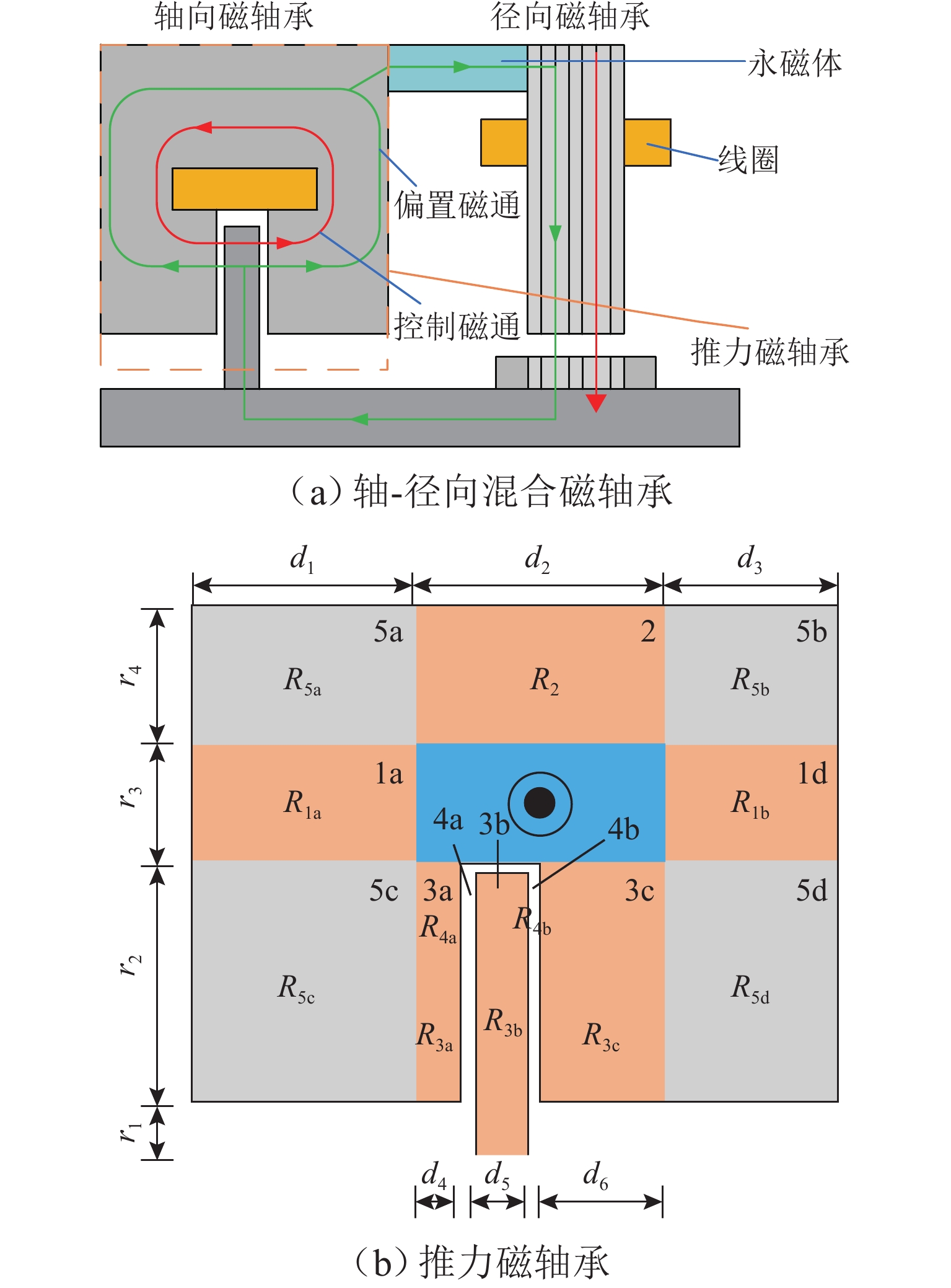
图 1 混合磁轴承模型及轴向磁轴承磁路划分
Figure 1. Hybrid magnetic bearing model and magnetic circuit division of axial magnetic bearing
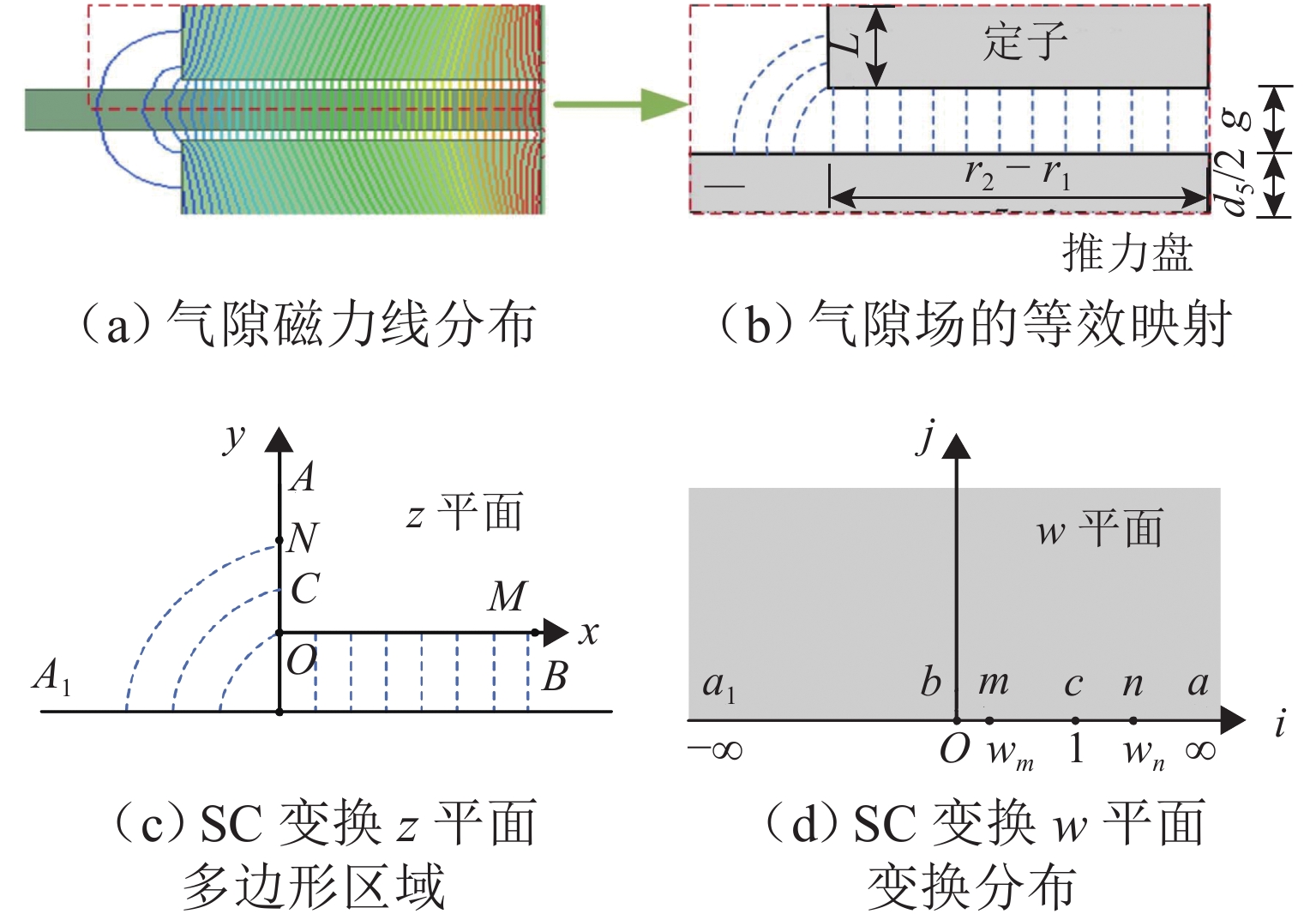
图 2 电磁推力轴承气隙磁场的SC变换
Figure 2. SC transformation of air-gap magnetic field in electromagnetic thrust bearing
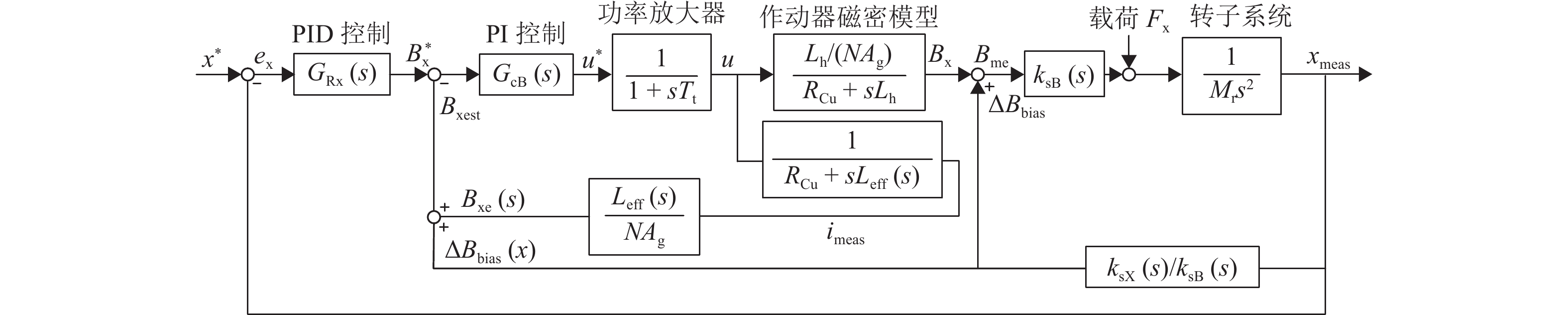
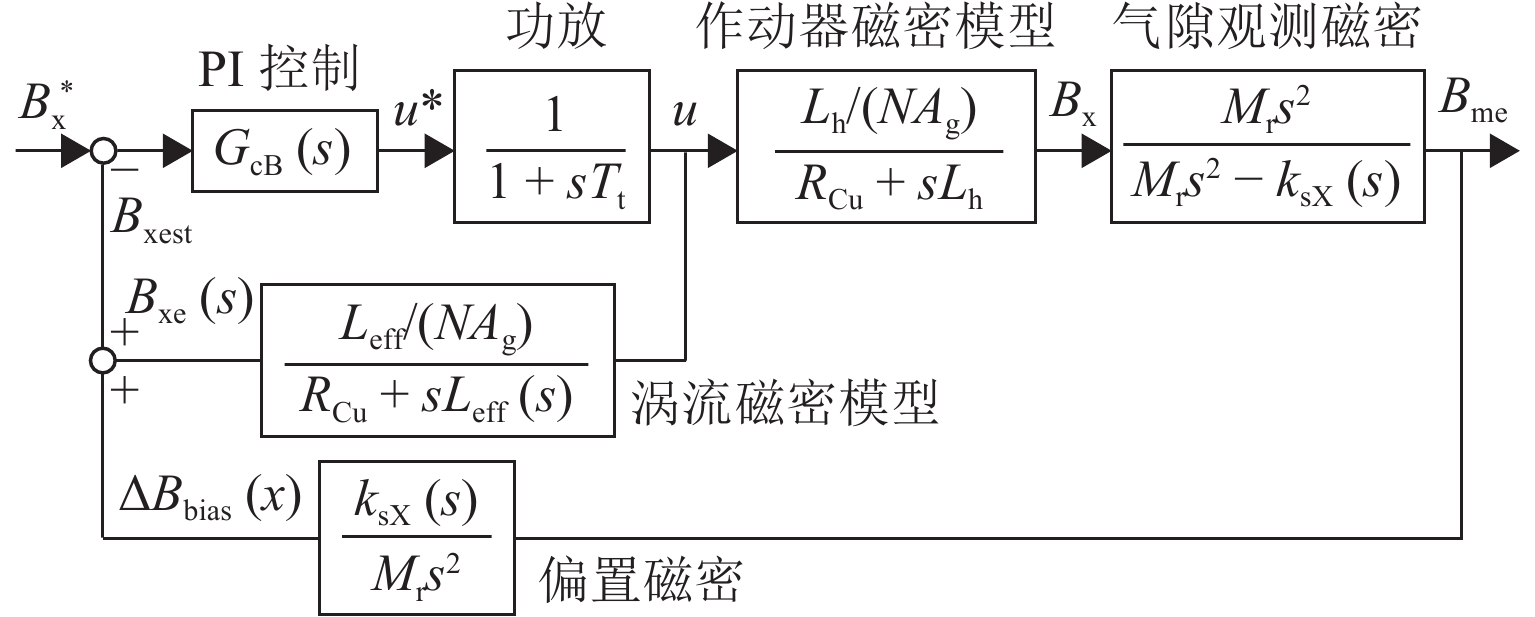
图 4 具有磁密估计反馈的级联位移-磁密推力轴承控制回路
Figure 4. Cascaded displacement-flux density control loop of thrust bearing with flux density estimation feedback
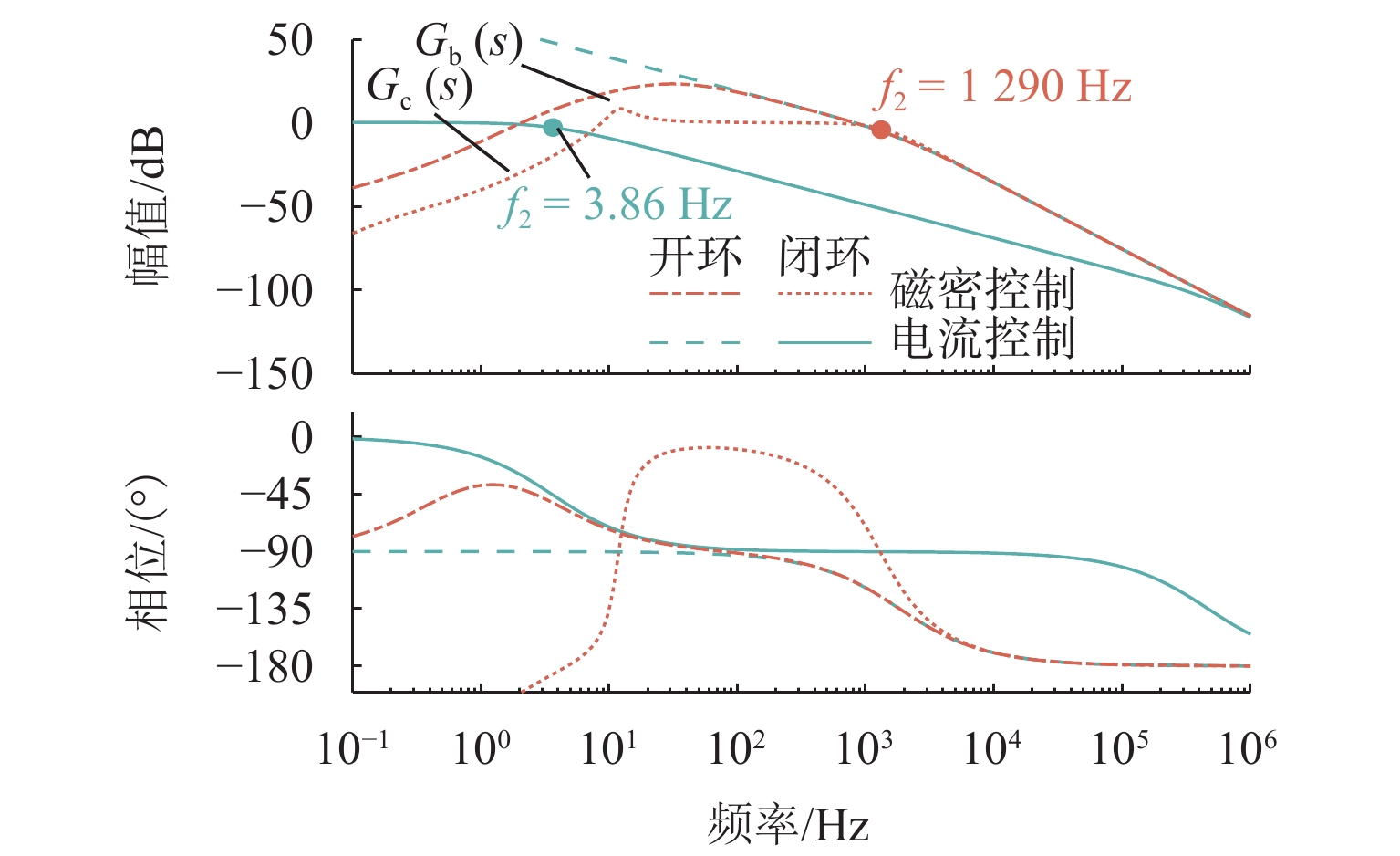
图 8 内部控制回路下电流控制和磁密控制的频率响应
Figure 8. Frequency responses of current control and flux density control under internal control loops
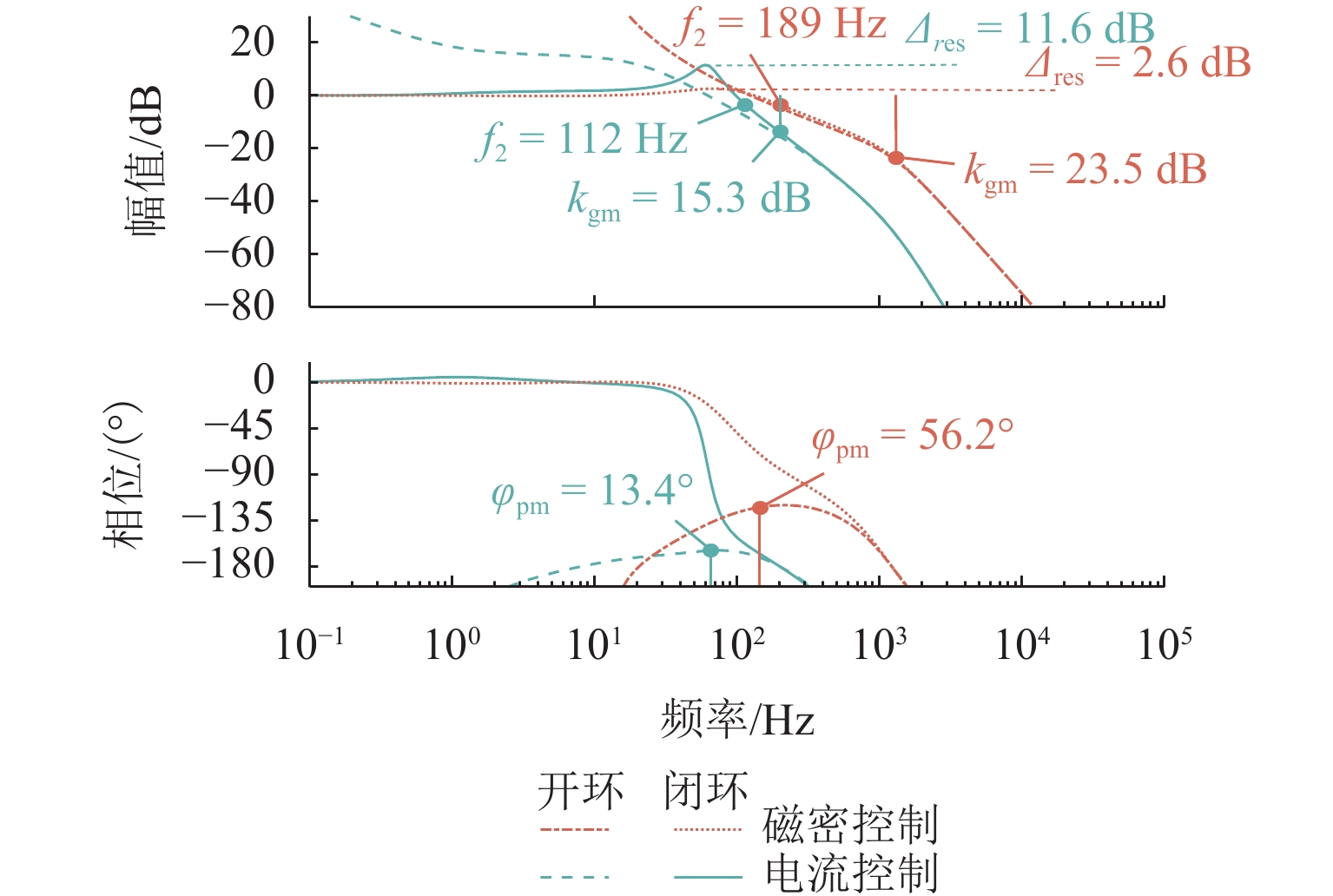
图 9 整体控制回路下电流控制和磁密控制的频率响应
Figure 9. Frequency responses of current control and flux density control under overall control loop
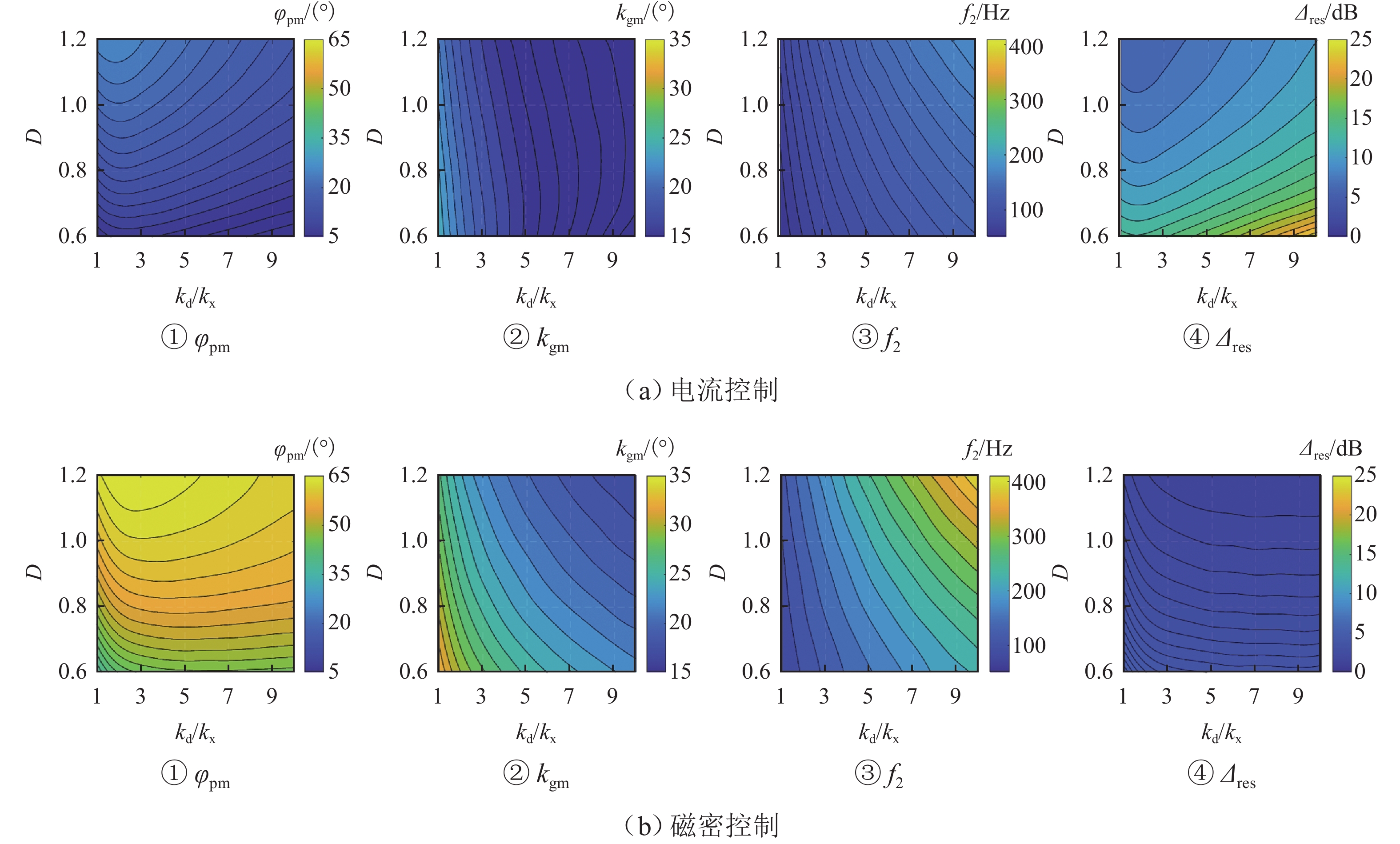
图 10 不同控制参数下电流控制和磁密控制的相位裕度、增益裕度、带宽、谐振峰
Figure 10. Phase margin, gain margin, bandwidth, and resonant peak of current control and flux density control under different control parameters
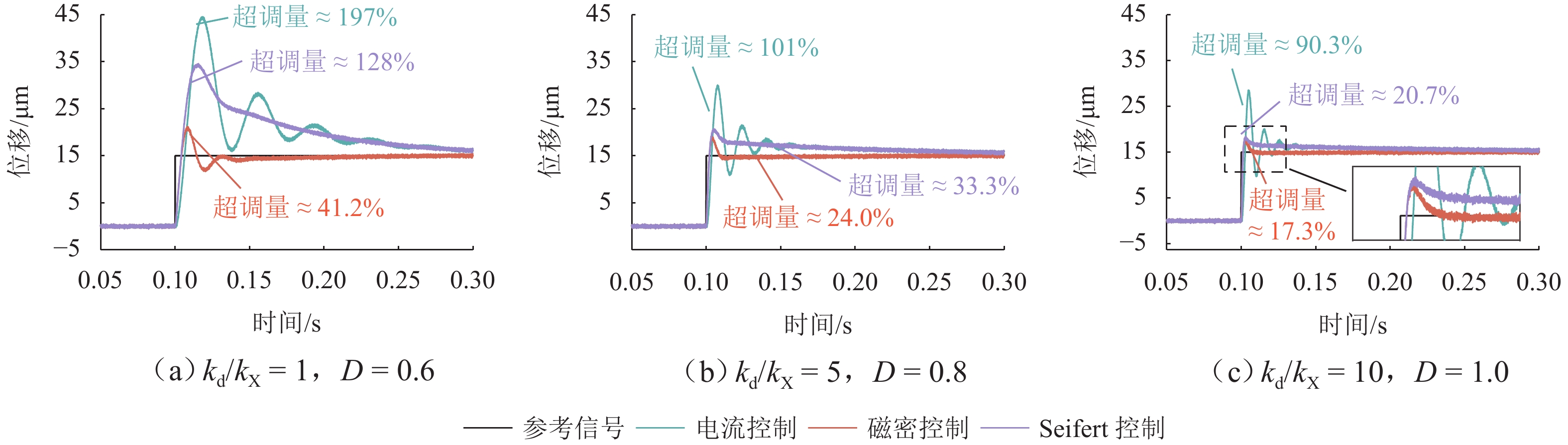
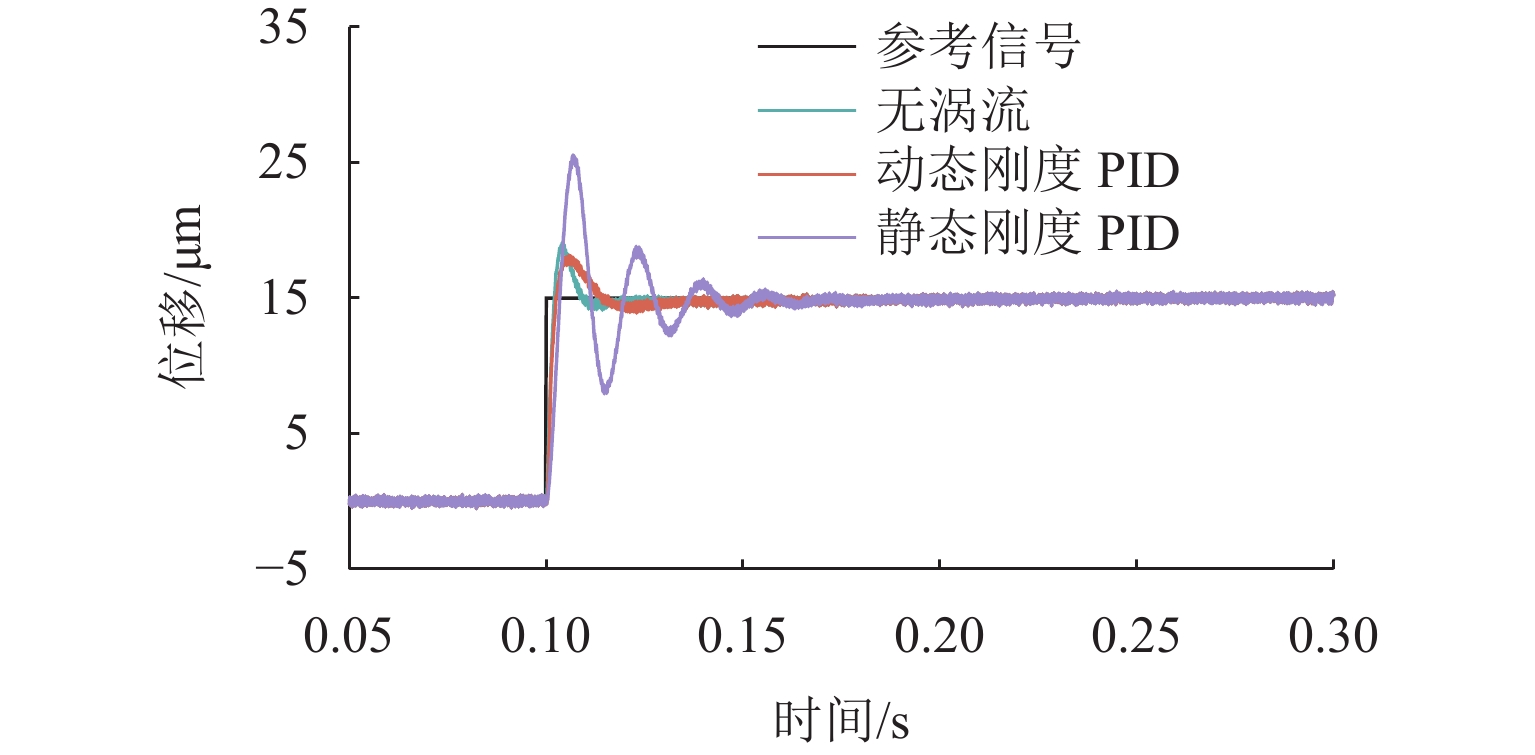
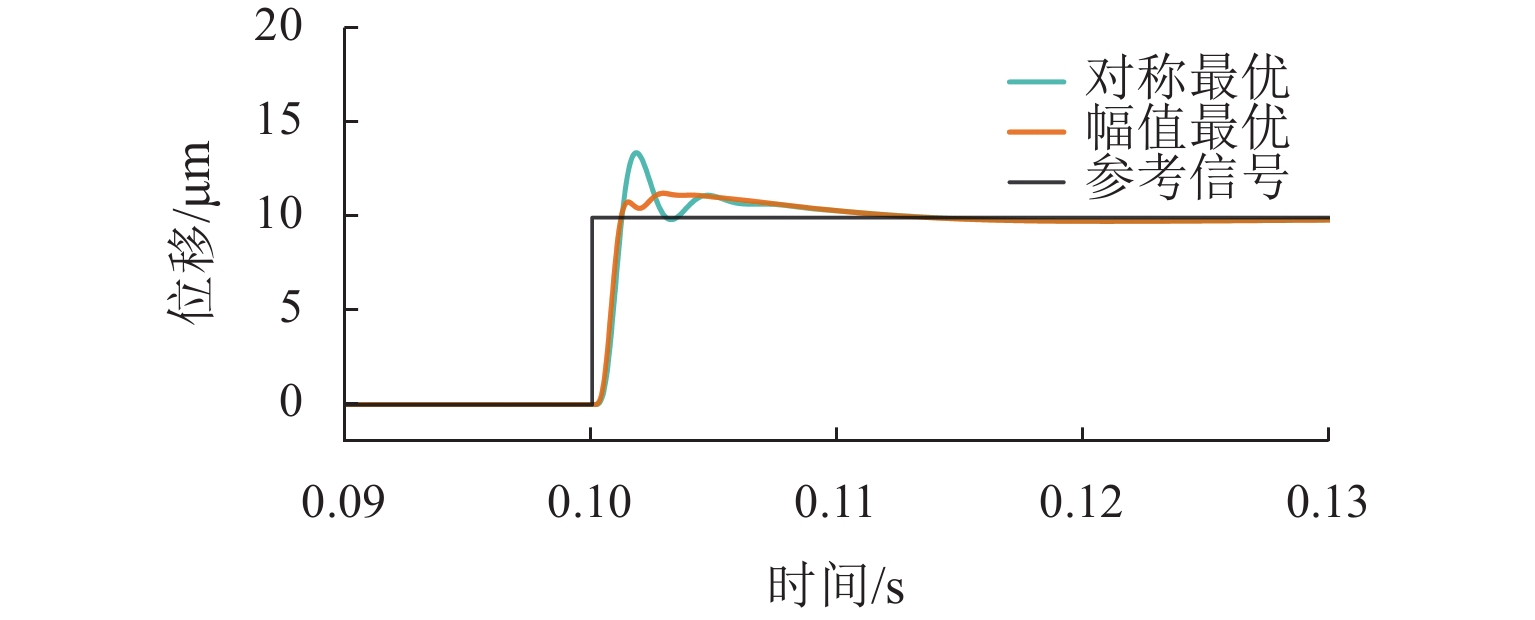
图 11 电流控制和磁密控制的阶跃响应
Figure 11. Step responses of current control and flux density control
-
[1] Bleuler H, Cole M, Keogh P, et al. Magnetic bearings: theory, design, and application to rotating machinery[M]. Berlin: Springer Science & Business Media, 2009. [2] Bühler P, Siegwart R, Herzog R. Digital Control for Low Cost Industrial AMB Applications[C]//Proceedings of The Fifth International Symposium on Magnetic Bearings. Tokyo: Department of Electrical and Computer Engineering, Kanazawa University, 1996: 83-88. [3] Zhu L, Knospe C R. Modeling of nonlaminated electromagnetic suspension systems[J]. IEEE/ASME Transactions on Mechatronics, 2010, 15(1): 59-69. doi: 10.1109/TMECH.2009.2016656 [4] Seifert R, Röbenack K, Hofmann W. Rational approximation of the analytical model of nonlaminated cylindrical magnetic actuators for flux estimation and control[J]. IEEE Transactions on Magnetics, 2019, 55(12): 8301016. doi: 10.1109/tmag.2019.2936791 [5] Sun Y, Ho Y S, Yu L. Dynamic stiffnesses of active magnetic thrust bearing including eddy-current effects[J]. IEEE Transactions on Magnetics, 2009, 45(1): 139-149. doi: 10.1109/TMAG.2008.2005795 [6] Le Y, Wang K. Design and optimization method of magnetic bearing for high-speed motor considering eddy current effects[J]. IEEE/ASME Transactions on Mechatronics, 2016, 21(4): 2061-2072. doi: 10.1109/TMECH.2016.2569822 [7] Bahr F, Mönch I, Ernst D, et al. Direct field control of AMBs using flux feedback based on integrable Hall sensors[C]//15th International Symposium on Magnetic Bearings, ISMB15. Red Hook: Curran Associates, Inc. , 2016: 3-6. [8] Mystkowski A, Kierdelewicz A, Jastrzebski R P, et al. Flux measurement and conditioning system for heteropolar active magnetic bearing using Kapton-foil Hall sensors[J]. Mechanical Systems and Signal Processing, 2019, 115: 394-404. doi: 10.1016/j.ymssp.2018.05.055 [9] Tsiotras P, Wilson B C. Zero-and low-bias control designs for active magnetic bearings[J]. IEEE Transactions on control systems Technology, 2004, 11(6): 889-904. doi: 10.1109/tcst.2003.819593 [10] Tsiotras P, Arcak M. Low-bias control of AMB subject to voltage saturation: State-feedback and observer designs[J]. IEEE Transactions on Control Systems Technology, 2005, 13(2): 262-273. doi: 10.1109/TCST.2004.839562 [11] Xiao L, He X W, Cheng W J. Analysis of eddy current field for new type of thrust bearings based on single-objective genetic algorithm[J]. International Journal of Applied Electromagnetics and Mechanics, 2020, 64(1/2/3/4): 263-270. doi: 10.3233/jae-209330 [12] Tian Y, Sun Y, Yu L. Modeling of eddy current loss for magnetic thrust bearings[C]//International Joint Tribology Conference. New York: American Society of Mechanical Engineers, 2012: 191-193. [13] Zhu L, Knospe C R, Maslen E H. Analytic model for a nonlaminated cylindrical magnetic actuator including eddy currents[J]. IEEE Transactions on Magnetics, 2005, 41(4): 1248-1258 doi: 10.1109/TMAG.2005.844847 [14] Zhong J P, Li L C. Identification of a solid-core magnetic bearing using incommensurate fractional-order models[C]//Proceedings of the 2013 International Conference on Advanced Mechatronic Systems. Luoyang: IEEE, 2013: 262-267. [15] Seifert R, Hofmann W. Highly Dynamic Thrust Bearing Control Based on a Fractional-Order Flux Estimator[J]. IEEE Transactions on Industry Applications, 2021, 57(6): 6988-6999. doi: 10.1109/TIA.2021.3076421 [16] 周丹, 祝长生, 王玎. 电磁轴承用磁通控制型功率放大器力增益的研究[J]. 电工技术学报, 2012, 27(1): 188-195.Zhou Dan, Zhu Changsheng, Wang Ding. Force gain of a flux control power amplifier for active magnetic bearings[J]. Transactions of China Electrotechnical Society, 2012, 27(1): 188-195. [17] Zhu Y S, Yang D S, Wang X, et al. Research on fractional-order modeling of nonlaminated electromagnetic bearings considering eddy current effects[J]. IEEE Transactions on Magnetics, 2022, 58(3): 1-8. doi: 10.1109/tmag.2021.3134012 [18] Seifert R, Hofmann W. Completion of analytical model of active magnetic thrust bearings including asymmetric air gap field between mixed materials[J]. Mechanical Engineering Journal, 2017, 4(5): 16-696-16-00696. doi: 10.1299/mej.16-00696 [19] Wang H, Wu Z, Liu K, et al. Modeling and control strategies of a novel axial hybrid magnetic bearing for flywheel energy storage system[J]. IEEE/ASME Transactions on Mechatronics, 2022, 27(5): 3819-3829. doi: 10.1109/TMECH.2022.3145705 [20] 周扬, 周瑾, 王艺宇, 等. 考虑界面接触的磁悬浮轴承-转子系统建模及鲁棒控制[J]. 西南交通大学学报, 2024, 59(4): 755-765Zhou Yang, Zhou Jin, Wang Yiyu , et al Modeling and robust control of magnetic bearing-rotor system considering interface contact[J]. Journal of Southwest Jiaotong University, 2024, 59(4): 755-765. [21] 肖玲, 李园超, 赵晨曦, 等. 冲击激励下轴线失准转子-磁轴承系统不对中定量研究[J]. 西南交通大学学报, 2024, 59(4): 737-745.Xiao Ling, Li Yuanchao, Zhao Chenxi , et al Quantitative research on misalignment magnitude of rotor-magnetic bearing system with axis misalignment under shock excitation[J]. Journal of Southwest Jiaotong University, 2024, 59(4): 737-745. [22] 金俊杰, 王岩峰, 徐程程, 等. 人工肾脏泵用磁悬浮轴承设计与磁力特性分析[J]. 西南交通大学学报, 2024, 59(4): 795-803.Jin Junjie, Wang Yanfeng, Xu Chengcheng, et al Design and magnetic force characteristic analysis of magnetic levitation bearing for artificial kidney pumps[J]. Journal of Southwest Jiaotong University, 2024, 59(4): 795-803. [23] Zhou L, Li L. Modeling and identification of a solid-core active magnetic bearing including eddy currents[J]. IEEE/ASME Transactions on Mechatronics, 2016, 21(6): 2784-2792. doi: 10.1109/TMECH.2016.2582644 [24] Riu D M, Retiere N M, Ivanes M S. Induced currents modeling by half-order systems application to hydro-and turbo-alternators[J]. IEEE Transactions on Energy Conversion, 2003, 18(1): 94-99. doi: 10.1109/TEC.2002.808385 [25] Matsuda K, Fujii H. H (infinity) optimized wave-absorbing control-Analytical and experimental results[J]. Journal of Guidance, Control, and Dynamics, 1993, 16(6): 1146-1153. doi: 10.2514/3.21139 [26] Sun J, Zhou H, Ma X, et al. Study on PID tuning strategy based on dynamic stiffness for radial active magnetic bearing[J]. ISA Transactions, 2018, 80: 458-474. doi: 10.1016/j.isatra.2018.07.036 [27] Jaatinen P O, Jastrzebski R P, Lindh T, et al. Implementation of a flux-based controller for active magnetic bearing system[C]//2013 11th IEEE International Conference on Industrial Informatics (INDIN). Bochum: IEEE, 2013: 141-145. [28] Liebfried R, Hofmann W. Performance of flux density based control approaches for active magnetic bearings–an overview[C]//16th International Symposium on Magnetic Bearings. Linz: Linz Center of Mechatronics, 2018: 259-266. [29] Preitl S, Precup R E. An extension of tuning relations after symmetrical optimum method for PI and PID controllers[J]. Automatica, 1999, 35(10): 1731-1736. doi: 10.1016/s0005-1098(99)00091-6 [30] Jastrzebski R P, Smirnov A, Mystkowski A, et al. Cascaded position-flux controller for an AMB system operating at zero bias[J]. Energies, 2014, 7(6): 3561-3575. doi: 10.3390/en7063561 -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 46
- HTML全文浏览量: 41
- PDF下载量: 18
- 被引次数: 0