

Optimization Design of Power Supply Partitions and Stator Segments in High-Speed Maglev Traction System
-
摘要:
为提升高速磁浮牵引供电系统的经济性,基于改进遗传算法提出一种供电分区与定子段长度的优化设计方法. 首先,通过分析双端供电模式下的等效电路建立牵引系统的数学模型,结合追踪间隔时间与牵引性能约束推导出供电分区的有效范围为20~40 km;然后,基于换步控制与牵引性能约束确定定子段的设计长度为600~
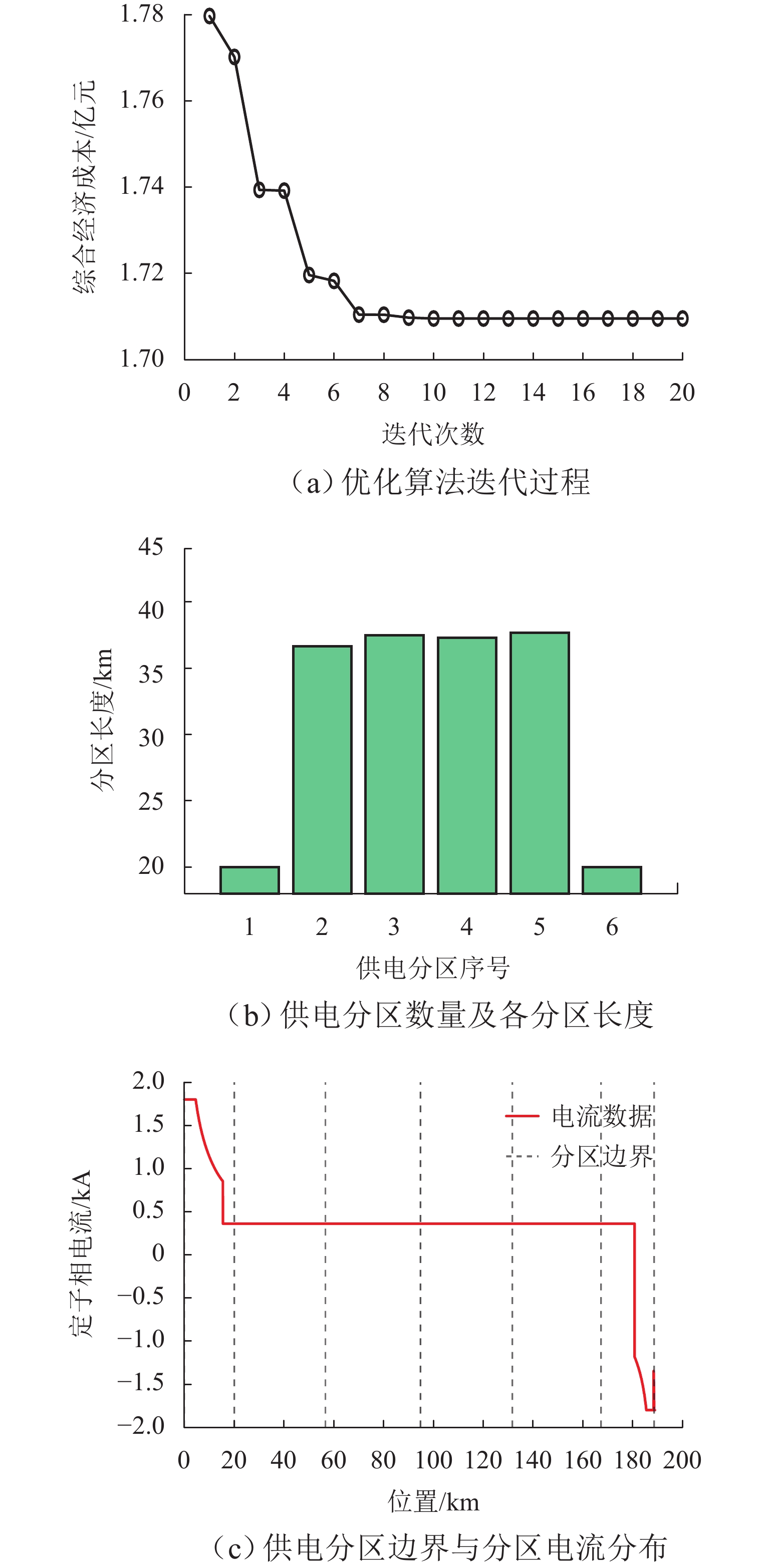
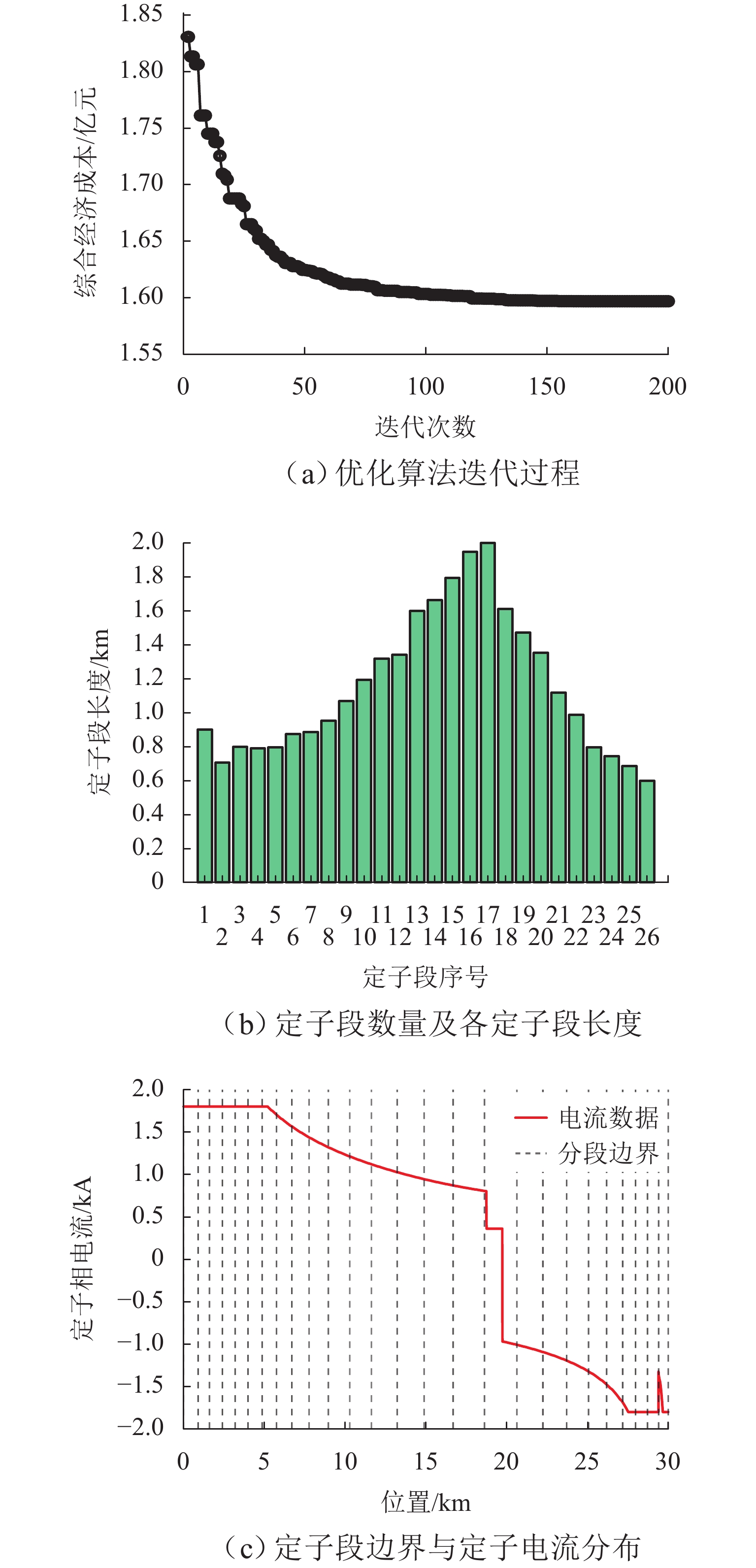
2000 m,在此基础上,采用动态约束自适应遗传算法,以综合经济成本最小化为目标,分别对供电分区与定子段长度进行优化设计;最后,选取沪杭磁浮规划线与上海磁浮示范线作为验证对象,通过硬件在环实验获取列车动态运行数据,对优化前后的牵引系统综合经济成本进行对比分析. 研究结果表明:沪杭线案例中,传统设计方案需设置7个27 km等长供电分区,优化方案调整为6个差异化分区,其中端部区段为20 km,中部区段集中在37 km左右,综合经济成本降幅为14.25%;对于上海磁浮示范线,既有方案采用25个长度约为1200 m的定子段,优化方案生成26个不等长定子段,形成“强流短距、弱流长距”的电流匹配布局,综合经济成本降幅为19.1%.Abstract:To enhance the economic efficiency of the traction power supply system of high-speed maglev, an optimization design method integrating power supply partitions and stator segment length was developed using the improved genetic algorithm. Firstly, a mathematical model of the traction system was established through analysis of equivalent circuits under dual-feeding mode. The effective range of power supply partitions was determined to be 20–40 km through comprehensive consideration of tracking intervals and traction performance constraints. Then, the design length of the stator segment was 600–2 000 m according to step-switching control and traction performance constraints. On this basis, the dynamically-constrained adaptive genetic algorithm was employed to optimize the design of the power supply partitions and stator segment length, so as to minimize the overall economic cost. Finally, the Shanghai–Hangzhou maglev planning line and the Shanghai maglev demonstration line were selected as validation subjects. Through hardware-in-the-loop simulations, dynamic train operation data was acquired to compare the comprehensive economic cost of the traction system before and after optimization. Results show that for the Shanghai–Hangzhou line, the traditional design scheme requires seven 27 km power supply partitions of equal length. In contrast, the optimized scheme uses six differentiated partitions, among which the partition at the ends is 20 km, and the central partition is about 37 km. This reduces the comprehensive economic cost by 14.25%. For the Shanghai maglev demonstration line, the existing scheme uses 25 stator segments with a length of about 1 200 m each. The optimized scheme produces 26 unequal-length segments, forming a current-matched layout with shorter segments for higher current and longer segments for lower current, which reduces the comprehensive economic cost by 19.1%.
-
Key words:
- maglev /
- power supply partition /
- stator segment length /
- genetic algorithm /
- nonlinear programming
-
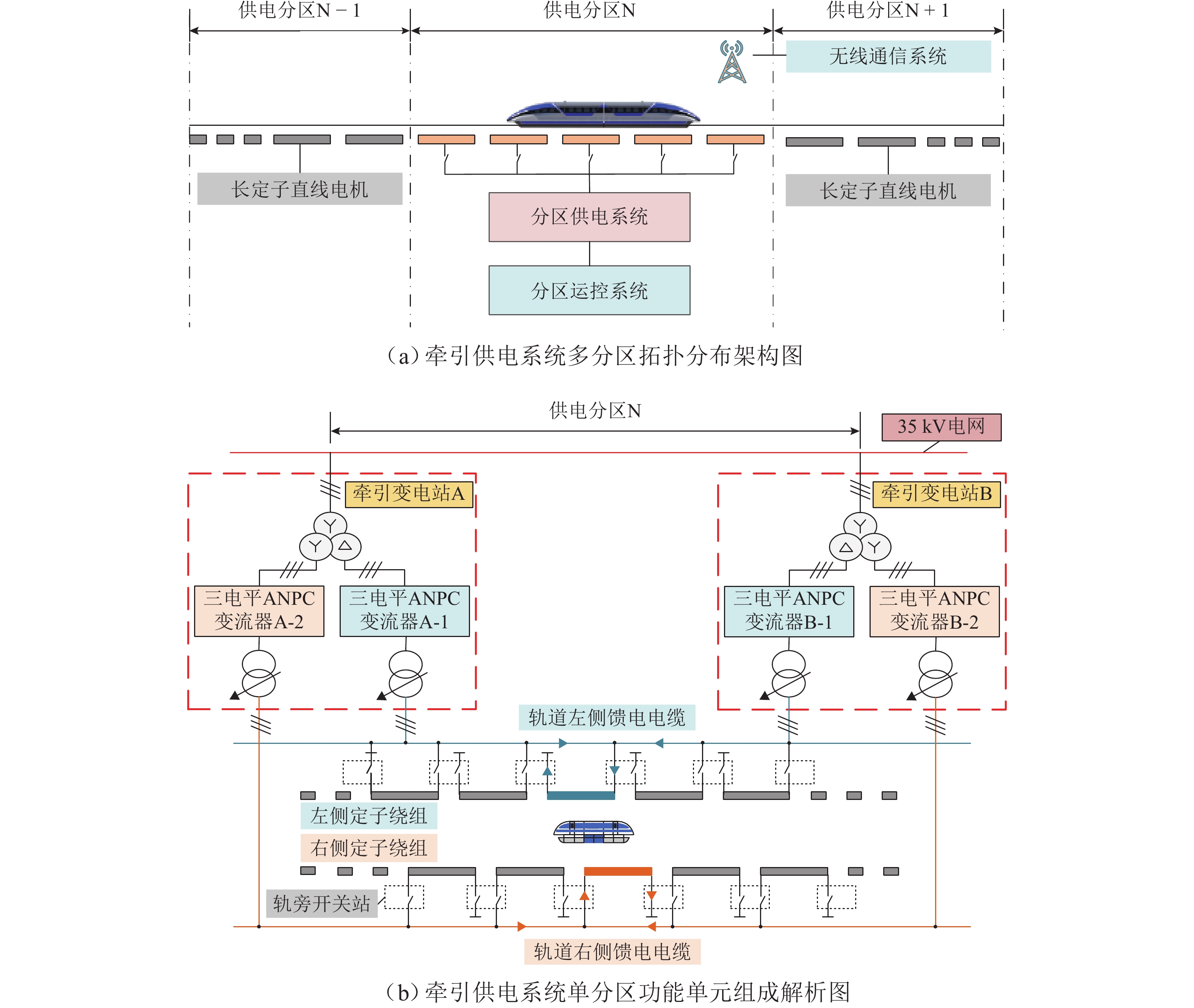
图 1 高速磁浮牵引供电系统结构图
Figure 1. Structures of traction power supply system of high-speed maglev
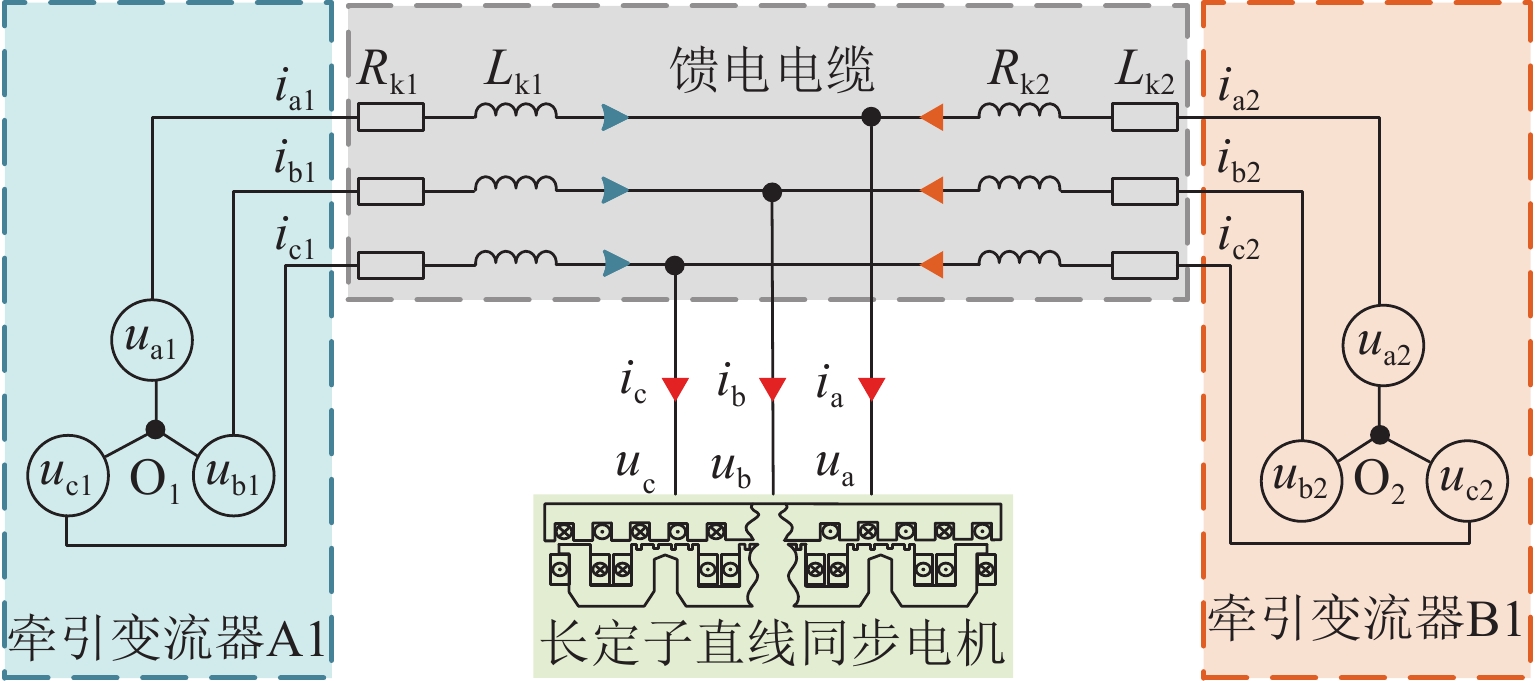
图 2 双端供电模式下的牵引系统电路原理图
Figure 2. Circuit principle of traction system in dual-feeding power supply mode
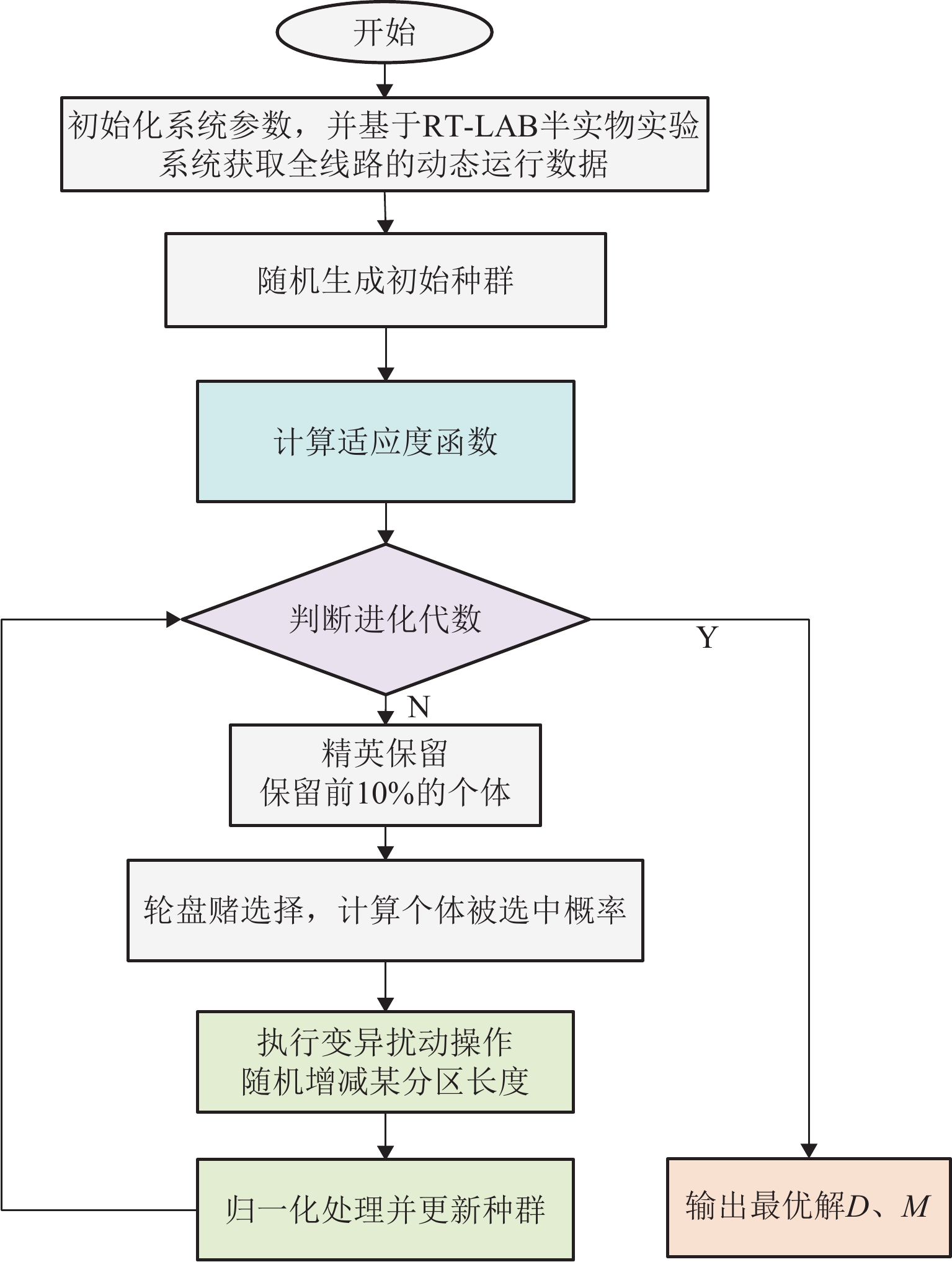
图 4 基于DC-GA的供电分区优化设计流程图
Figure 4. Flowchart of optimization design for power supply partitions based on DC-GA
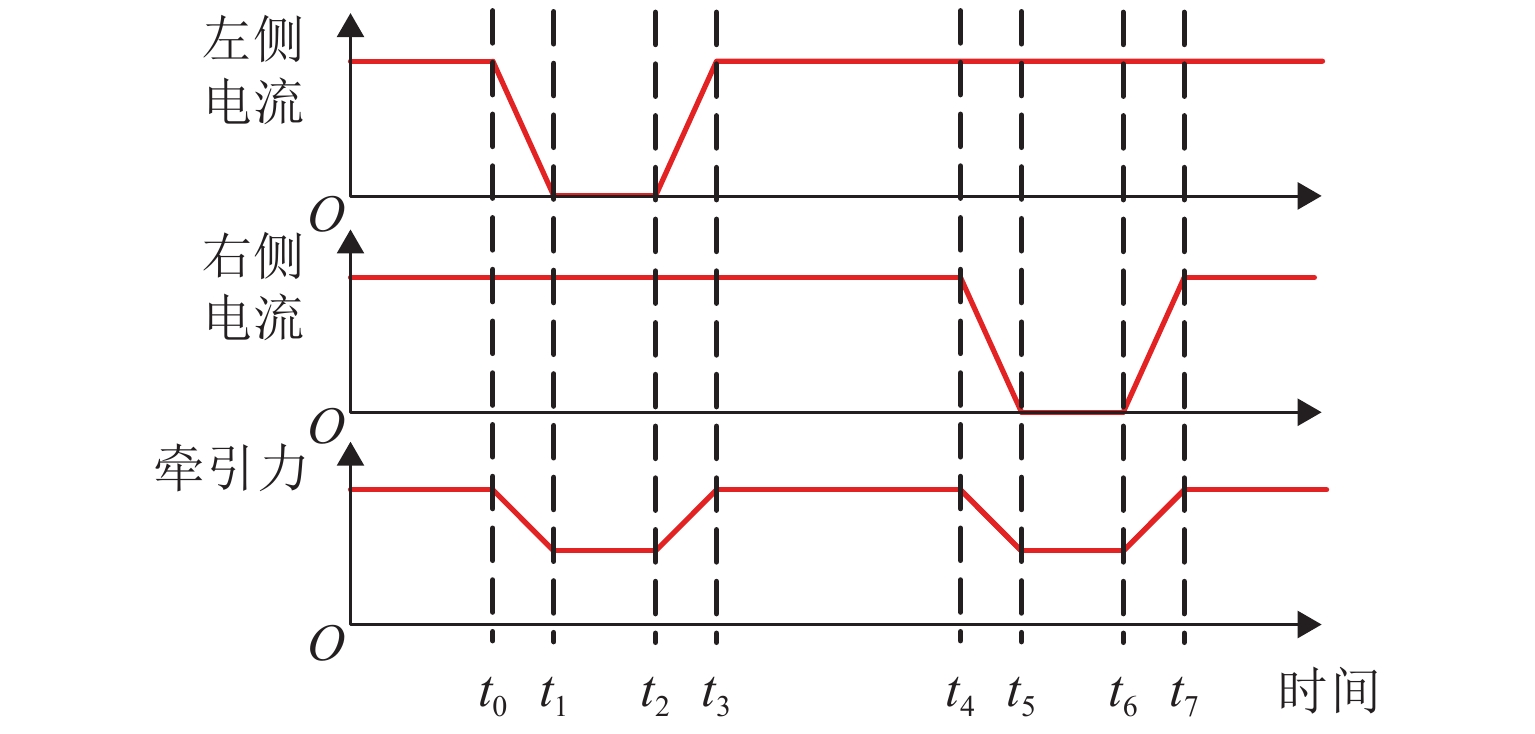
图 5 两步法换步时的电机定子电流与牵引力
Figure 5. Stator current and traction force of motor during two-step changing method
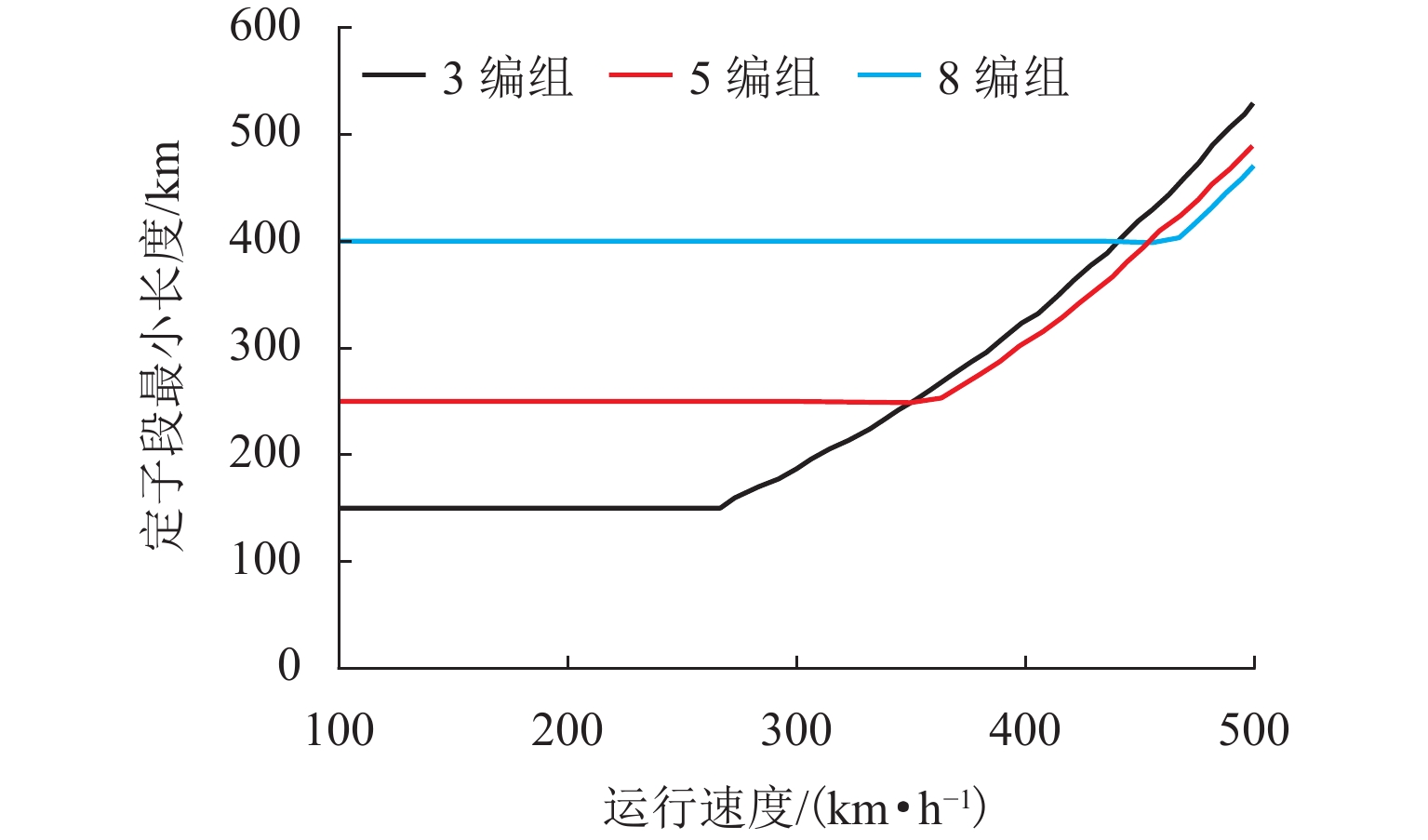
图 6 不同运行速度时的定子段最小长度
Figure 6. Minimum length of stator segments under different operating speeds
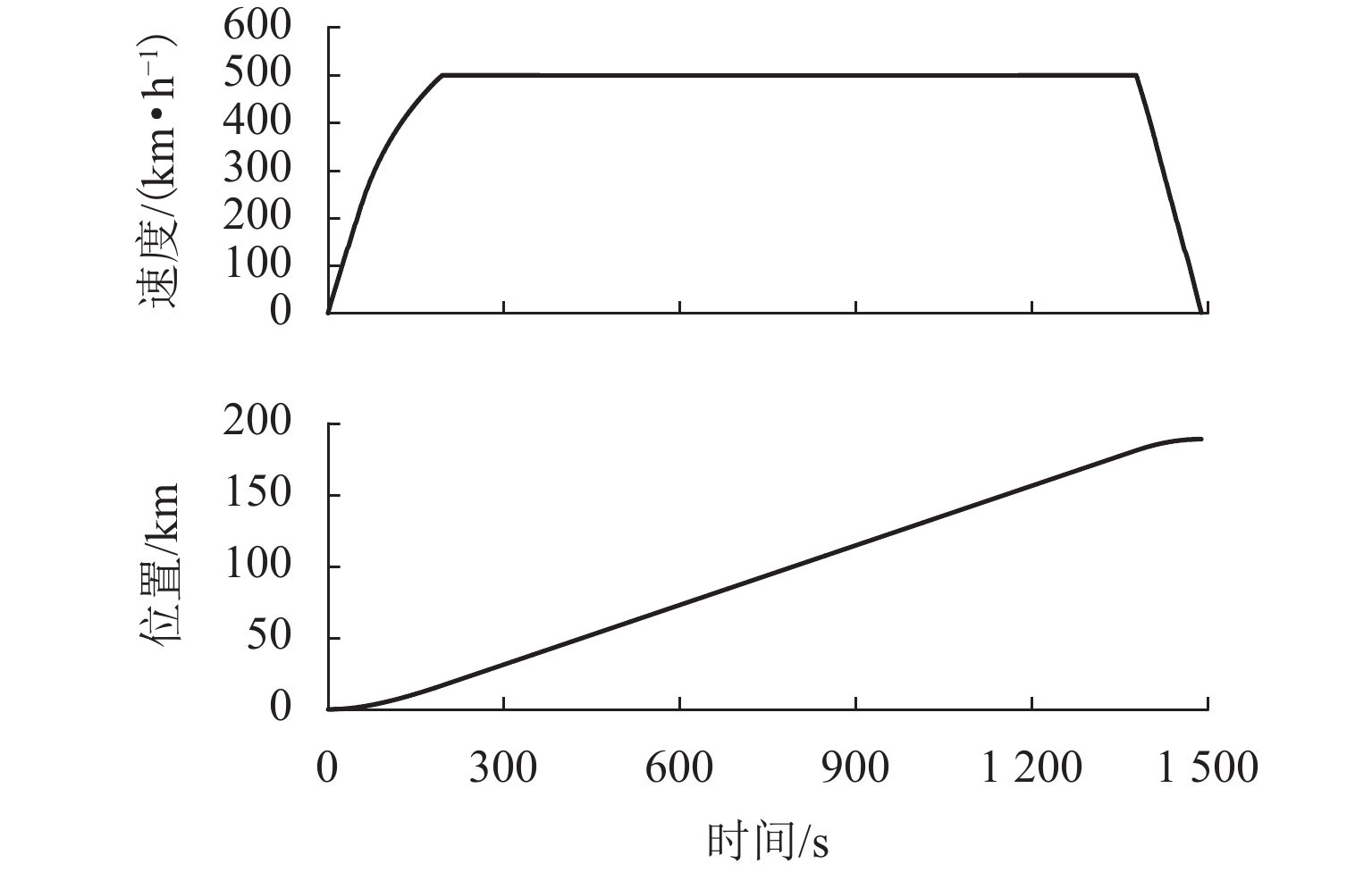
图 8 高速磁浮列车多分区运行时的速度与位置曲线
Figure 8. Speed and position curves of high-speed maglev in multi-partition operation
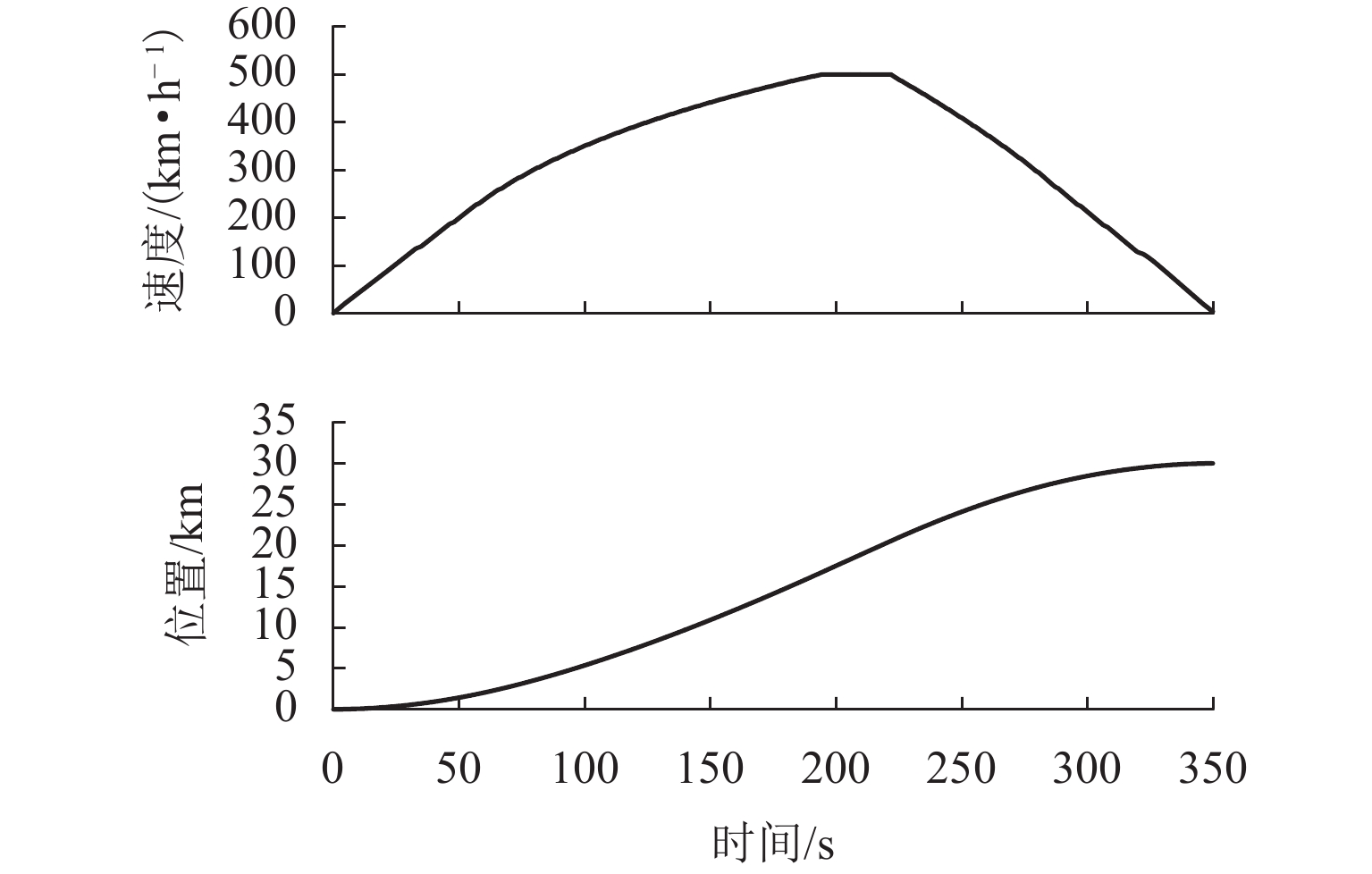
图 10 高速磁浮列车单分区运行时的速度与位置曲线
Figure 10. Speed and position curves of high-speed maglev train in single-partition operation
表 1 不同平均速度与追踪间隔下的供电分区最大长度
Table 1. Maximum length of power supply partitions under different average speeds and tracking intervals
追踪间隔/min 供电分区最大长度/km 200 km/h 300 km/h 400 km/h 500 km/h 5 16.7 25.0 33.3 41.6 6 20.0 30.0 40.0 50.0 7 23.3 35.0 46.6 58.3 8 26.6 40.0 53.3 66.6 9 30.0 45.0 60.0 75.0  下载: 导出CSV
下载: 导出CSV
表 2 高速磁浮供电分区长度与最高巡航速度的关系
Table 2. Correlation between power supply partition length and maximum cruising speed of high-speed maglev
供电分区长度/ km 最高运行速度/( km•h−1) 3 编组 5 编组 8 编组 10 521 508 467 20 514 500 457 30 501 484 443 40 485 468 430 50 469 455 417 60 457 441 406
下载: 导出CSV
表 3 不同运行速度及剩余加速度下的定子段最大长度
Table 3. Maximum length of stator segment under different operating speeds and remaining accelerations
加速度/
(m•s−2)定子段最大长度/m 100 km/h 200 km/h 300 km/h 430 km/h 500 km/h 0 5000 5000 5000 3550 2150 0.2 5000 5000 4450 2000 1250 0.4 5000 5000 2900 1300 800 0.6 5000 3800
下载: 导出CSV
表 4 牵引供电系统参数
Table 4. Parameters of traction power supply system
系统参数 数值 单位长度定子绕组电阻/(Ω•km−1) 2.54 × 10−1 单位长度定子绕组电感/(H•km−1) 2.60 × 10−3 单位长度馈电电缆电阻/(Ω•km−1) 5.83 × 10−2 单位长度馈电电缆电感/(H•km−1) 1.42 × 10−4 牵引力系数/(kN•kA−1) 42 变流器容量/MVA 24 列车总质量/t 308 列车编组数 5
下载: 导出CSV
表 5 供电分区设计传统方案与优化方案综合成本对比
Table 5. Comprehensive cost comparison between traditional and optimized schemes for power supply partition design
供电分区长度/km 综合成本/万元 传统方案 [27.00;27.00;27.00;27.00;27.00;27.00;27.00] 19937.26 优化方案 [20.00;37.54;37.09;37.11;37.24;20.00] 17095.34
下载: 导出CSV
表 6 定子段设计现行方案与优化方案综合成本对比
Table 6. Comprehensive cost comparison between traditional and optimized schemes for stator segment design
定子段长度/km 综合成本/万元 传统方案 [ 1036 ;1159 ;1206 ;1223 ;1177 ;1189 ;1238 ;1189 ;1238 ;1192 ;1180 ;1189 ;1188 ;1220 ;1220 ;1161 ;1232 ;1176 ;1235 ;1272 ;1222 ;1218 ;1180 ;1116 ;1177 ]16588.78 优化方案 [900;704;800;790;793;874;884;952; 1064 ;1191 ;1320 ;1338 ;1602 ;1668 ;1792 ;1950 ;2000 ;1617 ;1475 ;1356 ;1120 ;985;800;744;681;600]13419.70
下载: 导出CSV
-
[1] 熊嘉阳, 沈志云, 池茂儒, 等. 高速磁悬浮列车技术综述[J]. 交通运输工程学报, 2025, 25(2): 1-23. doi: 10.19818/j.cnki.1671-1637.2025.02.001XIONG Jiayang, SHEN Zhiyun, CHI Maoru, et al. Review on high-speed maglev train technology[J]. Journal of Traffic and Transportation Engineering, 2025, 25(2): 1-23. doi: 10.19818/j.cnki.1671-1637.2025.02.001 [2] 林国斌, 刘万明, 徐俊起, 等. 中国高速磁浮交通的发展机遇与挑战[J]. 前瞻科技, 2023, 2(4): 7-18. doi: 10.3981/j.issn.2097-0781.2023.04.001LIN Guobin, LIU Wanming, XU Junqi, et al. Opportunities and challenges for the development of high-speed maglev transportation in China[J]. Science and Technology Foresight, 2023, 2(4): 7-18. doi: 10.3981/j.issn.2097-0781.2023.04.001 [3] 邓自刚, 刘宗鑫, 李海涛, 等. 磁悬浮列车发展现状与展望[J]. 西南交通大学学报, 2022, 57(3): 455-474, 530. doi: 10.3969/j.issn.0258-2724.20220001DENG Zigang, LIU Zongxin, LI Haitao, et al. Development status and prospect of maglev train[J]. Journal of Southwest Jiaotong University, 2022, 57(3): 455-474,530. doi: 10.3969/j.issn.0258-2724.20220001 [4] 康劲松, 丁浩, 倪菲, 等. 计及悬浮系统影响的高速磁浮直线同步电机建模方法[J]. 西南交通大学学报, 2024, 59(4): 729-736. doi: 10.3969/j.issn.0258-2724.20230431KANG Jinsong, DING Hao, NI Fei, et al. Modeling of high-speed maglev linear synchronous motors considering influence of suspension system[J]. Journal of Southwest Jiaotong University, 2024, 59(4): 729-736. doi: 10.3969/j.issn.0258-2724.20230431 [5] ZHU J Q, CAO X Q, GE Q X, et al. Adaptive-SMO-based traction force fluctuation suppression strategy considering suspension system for high-speed maglev train[J]. IEEE Transactions on Industrial Electronics, 2024, 71(3): 2289-2299. doi: 10.1109/TIE.2023.3270525 [6] CAO X Q, GE Q X, ZHU J Q, et al. Improved sliding mode traction control combined sliding mode disturbance observer strategy for high-speed maglev train[J]. IEEE Transactions on Power Electronics, 2023, 38(1): 827-838. doi: 10.1109/TPEL.2022.3201614 [7] 李自康, 戴春辉, 黄翠翠, 等. 基于多种群遗传算法的磁浮列车自抗扰速度控制[J]. 西南交通大学学报, 2025, 60(4): 912-920. doi: 10.3969/j.issn.0258-2724.20240113LI Zikang, DAI Chunhui, HUANG Cuicui, et al. Active disturbance rejection speed control for maglev trains based on multiple population genetic algorithm[J]. Journal of Southwest Jiaotong University, 2025, 60(4): 912-920. doi: 10.3969/j.issn.0258-2724.20240113 [8] 张昕, 翟凌露, 王舰深, 等. 基于加权融合的常导高速磁浮列车UKF定位算法[J]. 西南交通大学学报, 2024, 59(4): 832-838. doi: 10.3969/j.issn.0258-2724.20230501ZHANG Xin, ZHAI Linglu, WANG Jianshen, et al. Weighted fusion-based unscented Kalman filter positioning algorithm for normal-conducting high-speed maglev trains[J]. Journal of Southwest Jiaotong University, 2024, 59(4): 832-838. doi: 10.3969/j.issn.0258-2724.20230501 [9] MA Z X, NIU H C, ZHANG X, et al. Virtual space vector overmodulation strategy for NPC three-level inverters with common-mode voltage suppression[J]. IEEE Transactions on Power Electronics, 2024, 39(6): 6877-6888. doi: 10.1109/TPEL.2024.3375348 [10] ZHAO M T, GE Q X, ZHU J Q, et al. Improved synchronized SVPWM strategy for high-power three-level active neutral point clamped traction inverter[J]. IEEE Transactions on Power Electronics, 2025, 40(2): 3189-3209. doi: 10.1109/TPEL.2024.3487528 [11] GAO Z, GE Q X, LI Y H, et al. Hybrid improved carrier-based PWM strategy for three-level neutral-point-clamped inverter with wide frequency range[J]. IEEE Transactions on Power Electronics, 2021, 36(7): 8517-8538. doi: 10.1109/TPEL.2020.3047952 [12] 葛琼璇, 张波, 韦榕, 等. 高速磁浮交通牵引供电与控制技术现状及展望[J]. 前瞻科技, 2023, 2(4): 89-95. doi: 10.3981/j.issn.2097-0781.2023.04.009GE Qiongxuan, ZHANG Bo, WEI Rong, et al. Present situation and prospect of traction power supply and control technologies for highspeed maglev transportation[J]. Science and Technology Foresight, 2023, 2(4): 89-95. doi: 10.3981/j.issn.2097-0781.2023.04.009 [13] 魏远乐, 郝文瑾, 刘建强. 高速磁浮列车供电分区及定子段设计方法研究[J]. 铁道建筑技术, 2020(12): 1-5, 12.WEI Yuanle, HAO Wenjin, LIU Jianqiang. Research on the design method of power supply division and stator segment of high-speed maglev train[J]. Railway Construction Technology, 2020(12): 1-5,12. [14] 丁文亮. 中速磁浮列车追踪间隔时间计算方法及供电分区划分优化研究[D]. 北京: 北京交通大学, 2019. [15] 林滢, 秦峰. 600 km/h高速磁浮牵引系统的配置及其关键参数的选择[J]. 城市轨道交通研究, 2023, 26(8): 110-113. doi: 10.16037/j.1007-869x.2023.08.019LIN Ying, QIN Feng. Configuration for 600 km/h high-speed maglev traction system and selection of key parameters[J]. Urban Mass Transit, 2023, 26(8): 110-113. doi: 10.16037/j.1007-869x.2023.08.019 [16] ZHAO M T, GE Q X. Grid-side harmonic current suppression based on carrier phase-shifted PWM and extended state observer for high-power multiple parallel 3L-ANPC rectifier[J]. IEEE Transactions on Industrial Electronics, 2024, 71(6): 5399-5410. doi: 10.1109/TIE.2023.3294648 [17] 姜西. 常导高速磁浮列车追踪间隔研究[J]. 机车电传动, 2025(1): 175-181. doi: 10.13890/j.issn.1000-128X.2025.01.110JIANG Xi. Study on tracking interval of normal-conducting high-speed maglev trains[J]. Electric Drive for Locomotives, 2025(1): 175-181. doi: 10.13890/j.issn.1000-128X.2025.01.110 [18] 朱进权, 葛琼璇, 孙鹏琨, 等. 高速磁悬浮列车在双端供电模式下的电流控制策略[J]. 电工技术学报, 2021, 36(23): 4937-4947.ZHU Jinquan, GE Qiongxuan, SUN Pengkun, et al. Current control strategy for high-speed maglev in the double feeding mode[J]. Transactions of China Electrotechnical Society, 2021, 36(23): 4937-4947. [19] 张雯柏, 林国斌, 康劲松, 等. 考虑相移补偿的磁浮列车长定子高频注入无传感控制方法[J]. 西南交通大学学报, 2025, 60(4): 1032-1041. doi: 10.3969/j.issn.0258-2724.20240310ZHANG Wenbai, LIN Guobin, KANG Jinsong, et al. Sensorless control method of high-frequency injection for long-stator synchronous motor of maglev trains considering phase shift compensation[J]. Journal of Southwest Jiaotong University, 2025, 60(4): 1032-1041. doi: 10.3969/j.issn.0258-2724.20240310 [20] XIAO X Y, XU W, TANG Y R, et al. Improved loss minimization control based on time-harmonic equivalent circuit for linear induction motors adopted to linear metro[J]. IEEE Transactions on Vehicular Technology, 2023, 72(7): 8601-8612. doi: 10.1109/TVT.2023.3244602 [21] 孙鹏琨, 葛琼璇, 王晓新, 等. 基于降阶观测器的高速磁浮列车无速度传感器控制算法[J]. 中国电机工程学报, 2020, 40(4): 1302-1309, 1421. doi: 10.13334/j.0258-8013.pcsee.190691SUN Pengkun, GE Qiongxuan, WANG Xiaoxin, et al. Sensorless control strategy of high speed maglev based on reduced order observer[J]. Proceedings of the CSEE, 2020, 40(4): 1302-1309, 1421. doi: 10.13334/j.0258-8013.pcsee.190691 [22] 彭兵, 王成元, 夏加宽, 等. 磁动势法五相永磁力矩电机转矩分析[J]. 中国电机工程学报, 2012, 32(21): 105-111.PENG Bing, WANG Chengyuan, XIA Jiakuan, et al. Torque analysis of five-phase permanent magnet torque motors based on magnetic motive force[J]. Proceedings of the CSEE, 2012, 32(21): 105-111. [23] 邓连波, 陈晨, 静恩伟, 等. 高速磁浮车站列车作业优化与能力分析[J]. 铁道科学与工程学报, 2023, 20(11): 4041-4049. doi: 10.19713/j.cnki.43-1423/u.T20222325DENG Lianbo, CHEN Chen, JING Enwei, et al. Train operation optimization and capability analysis of high-speed maglev station[J]. Journal of Railway Science and Engineering, 2023, 20(11): 4041-4049. doi: 10.19713/j.cnki.43-1423/u.T20222325 [24] DING Z S, FAN X H, SONG B S, et al. NSGA-II model-based dielectric frequency response parameters for aging and moisture analysis of transformer insulation[J]. IEEE Transactions on Instrumentation and Measurement, 2022, 71: 3518710. [25] 王娟. 磁悬浮列车用长定子直线同步电机特性研究与故障分析[D]. 北京: 中国科学院电工研究所. 2004. [26] 刘江伟. 沪杭高速磁浮通道线路方案研究[J]. 铁道标准设计, 2024, 68(8): 23-29. doi: 10.13238/j.issn.1004-2954.202301060005LIU Jiangwei. Research on Shanghai-Hangzhou high speed maglev line scheme[J]. Railway Standard Design, 2024, 68(8): 23-29. doi: 10.13238/j.issn.1004-2954.202301060005 -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 171
- HTML全文浏览量: 147
- PDF下载量: 40
- 被引次数: 0