

Generational Evolution Path of Autonomous Transportation Systems Based on Hierarchical Evolvable Architecture Models
-
摘要:
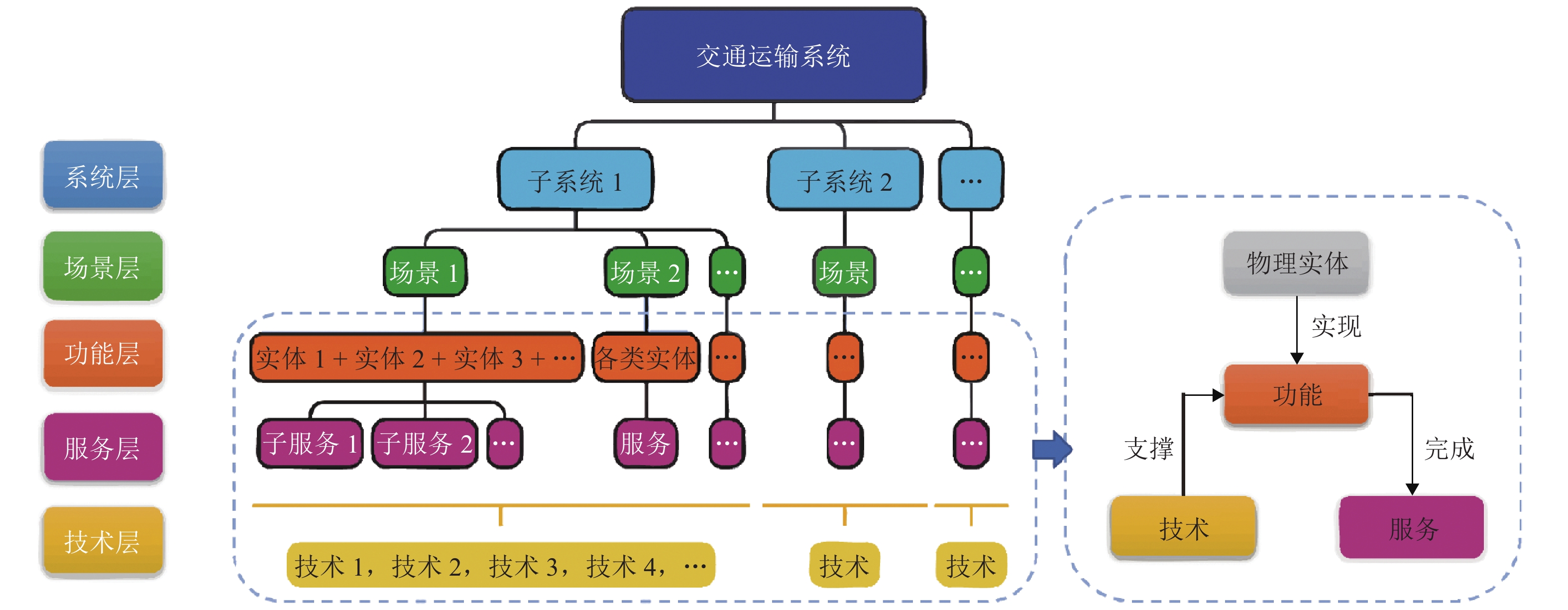
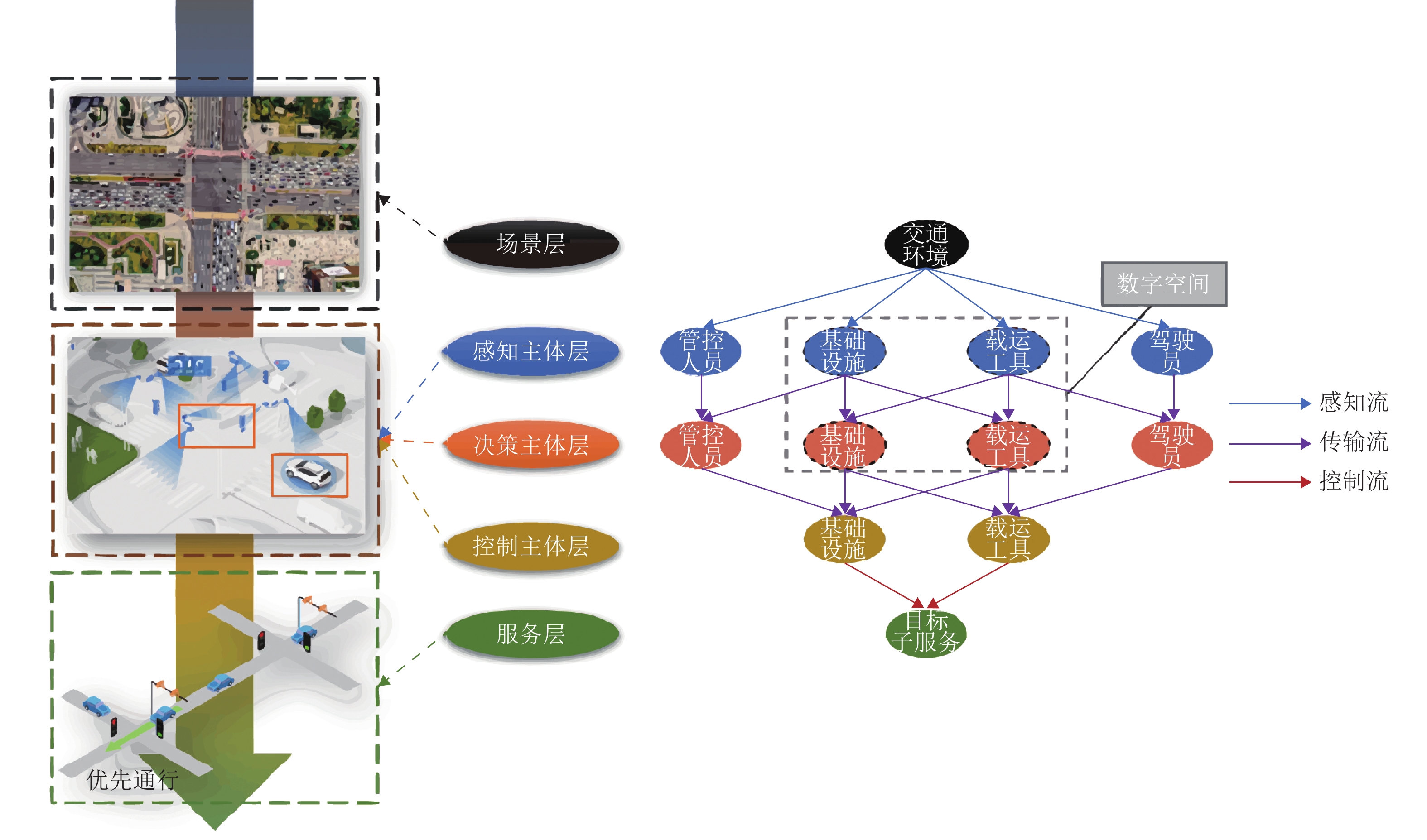
随着智能技术不断发展,交通系统向着自主化、无人化的运转方式转变. 为明确不同自主化水平ATS (autonomous transportation system)的技术特点与功能优势,通过量化ATS的代际演进标准、评估系统拓扑结构和模拟分析ATS代际演进路径,将ATS解构为系统、场景、功能、技术、服务共5个层次;针对交通场景、交通主体、交通服务之间的链路关系,以各功能所需技术类型及其发展水平的量化值为链路路阻,基于经典网络理论提出面向ATS的分层可演进架构模型;以道路交叉口场景下的优先通行服务为例,通过调查问卷标定链路路阻,深入剖析ATS交通主体间的作用关系、功能实现和信息流动. 研究结果表明:增加互操作链路可以显著提升ATS的自主化水平,其中,“人类参与度将降至10%以下”将成为完全自主化水平达成的关键节点;本文所提出的分层可演进架构模型为ATS代际演进提供了量化分析框架,填补了现有理论在系统级动态演进建模方面的空白. 研究成果可为交通管理部门制定ATS发展规划提供决策支持,为技术研发优先级设定提供量化依据.
Abstract:As the intelligent technologies continuously develop, the transportation system is shifting toward autonomous and unmanned operation modes. To clarify the technical characteristics and functional advantages of autonomous transportation systems (ATS) at different autonomy levels, this paper deconstructs ATS into five layers of the system, scenario, function, technology, and service by quantifying the generational evolution standards of ATS, evaluating system topology, and simulating and analyzing the generational evolution paths of ATS. Meanwhile, in terms of the linkages between traffic scenarios, traffic entities, and traffic services, it employs the quantized values of technological types and their development levels required by each function as the link cost, and proposes a hierarchical evolvable architecture model for ATS based on classical network theory. Finally, by taking the priority passage service under road intersection scenarios as an example, the interaction relationship between ATS traffic entities, functional realization, and information flow is analyzed in depth by calibrating the link cost via questionnaires. The results show that increasing interoperable linkages can significantly improve the autonomy level of ATS, with the key milestone for full autonomy being “human participation reduced to less than 10%”. The proposed hierarchical evolvable architecture model provides a quantitative analysis framework for ATS generational evolution, filling the gap of existing theories in system-level dynamic evolution modeling. The findings can assist transportation authorities in ATS development planning and provide a quantitative basis for priority setting in technological research and development.
-
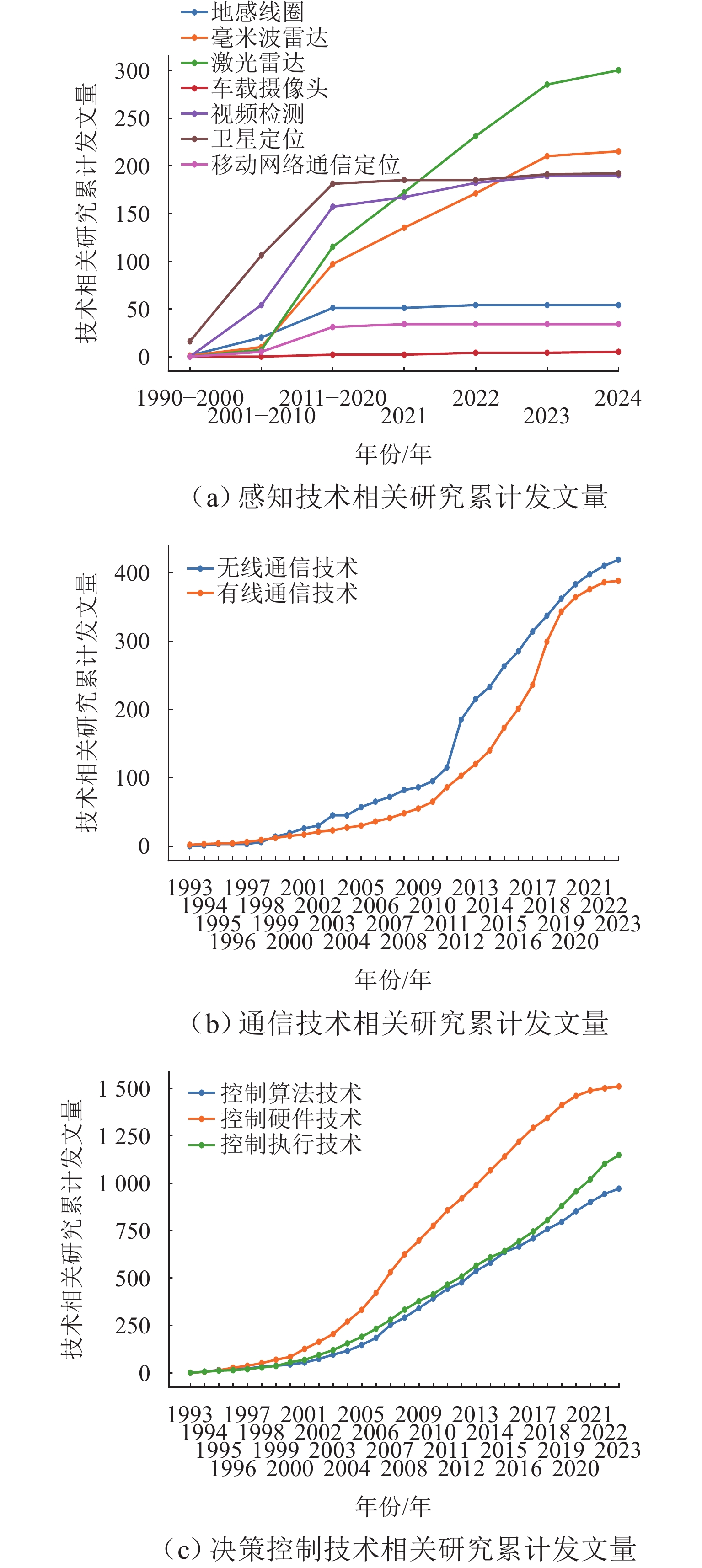
图 4 当前阶段ATS各类技术累计发文量变化
Figure 4. Cumulative publication volume variation of various ATS technologies at the current stage
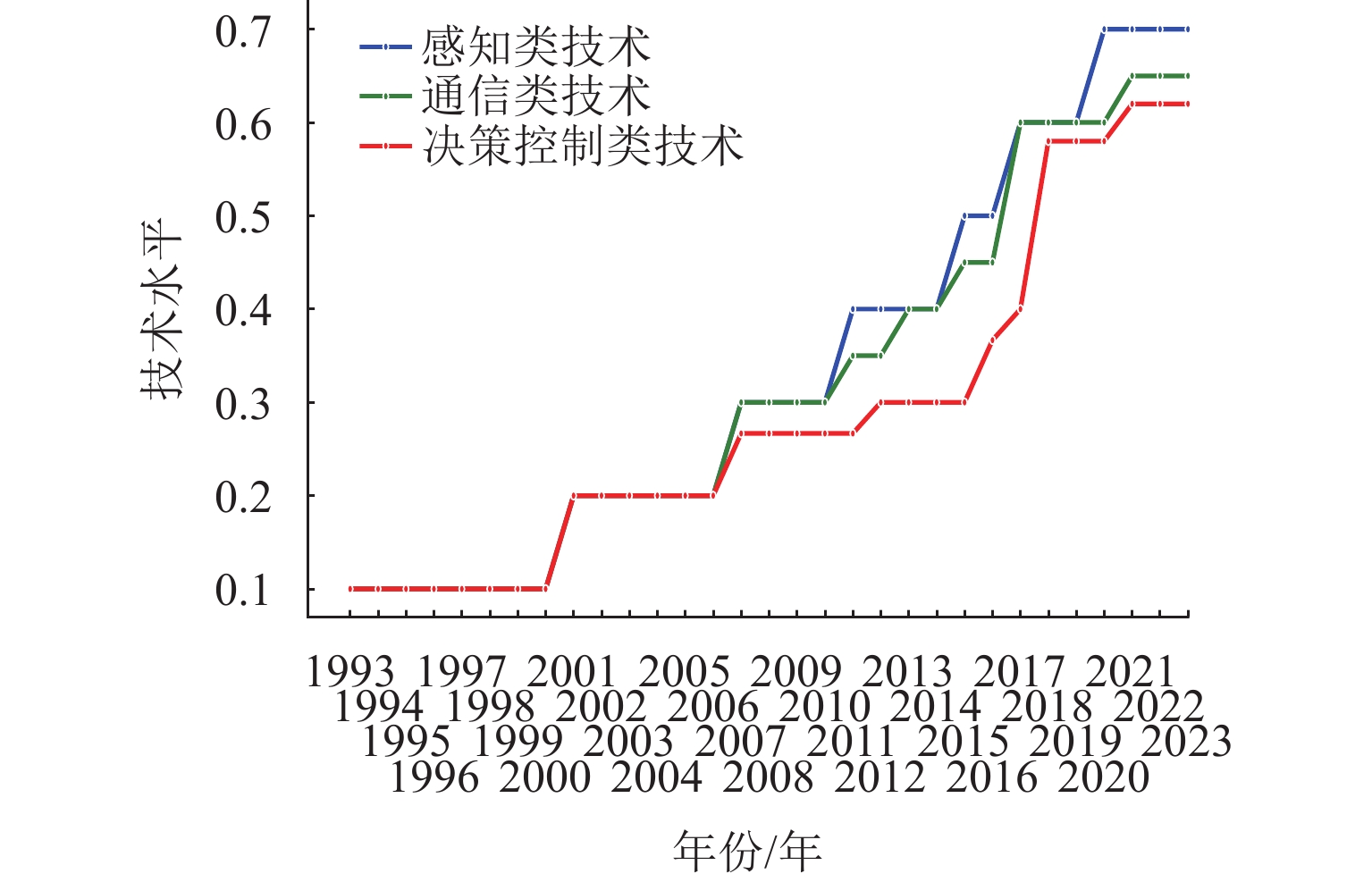
图 5 当前阶段ATS各类技术发展水平变化
Figure 5. Development level variation of various ATS technologies at the current stage
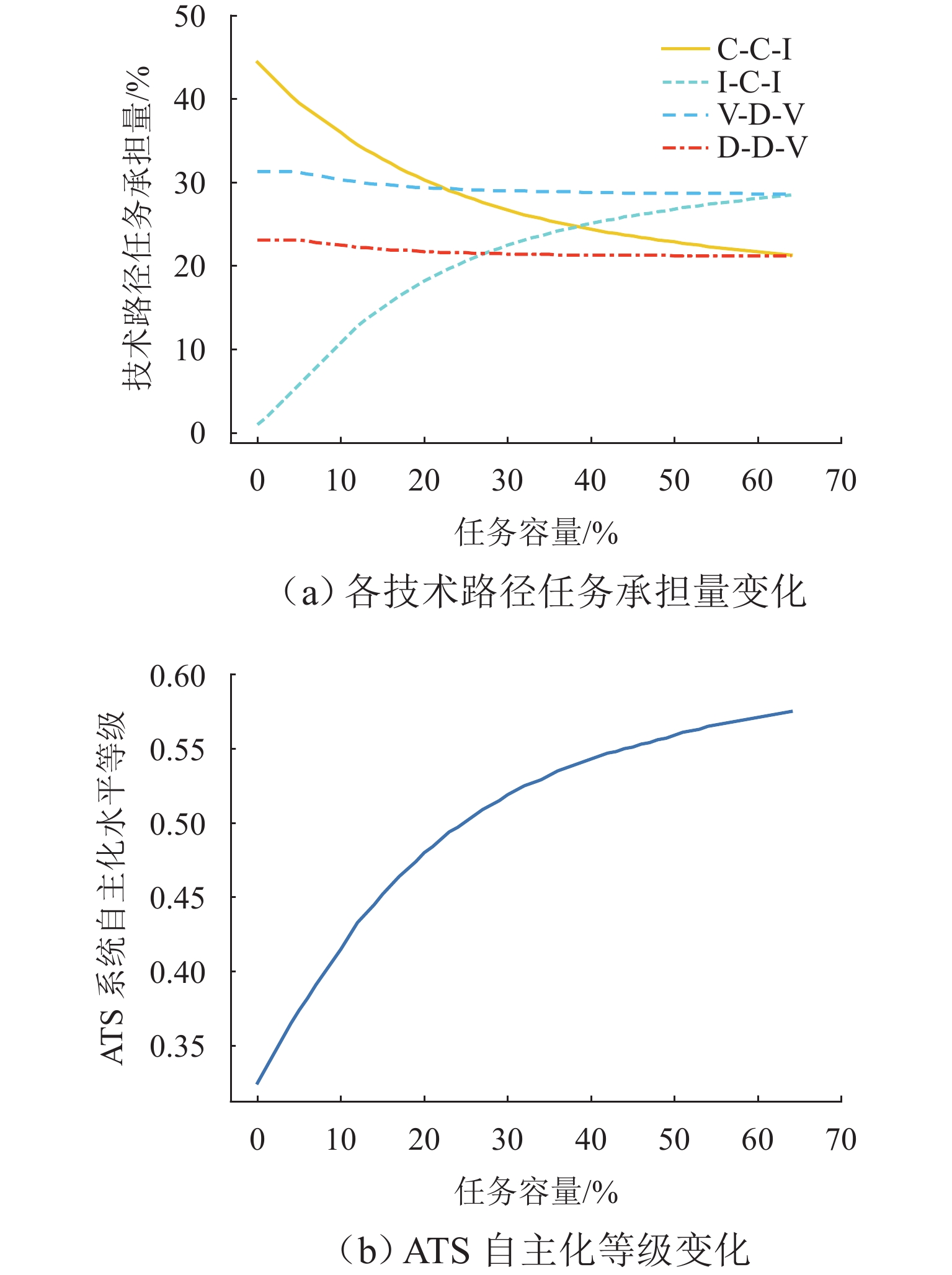
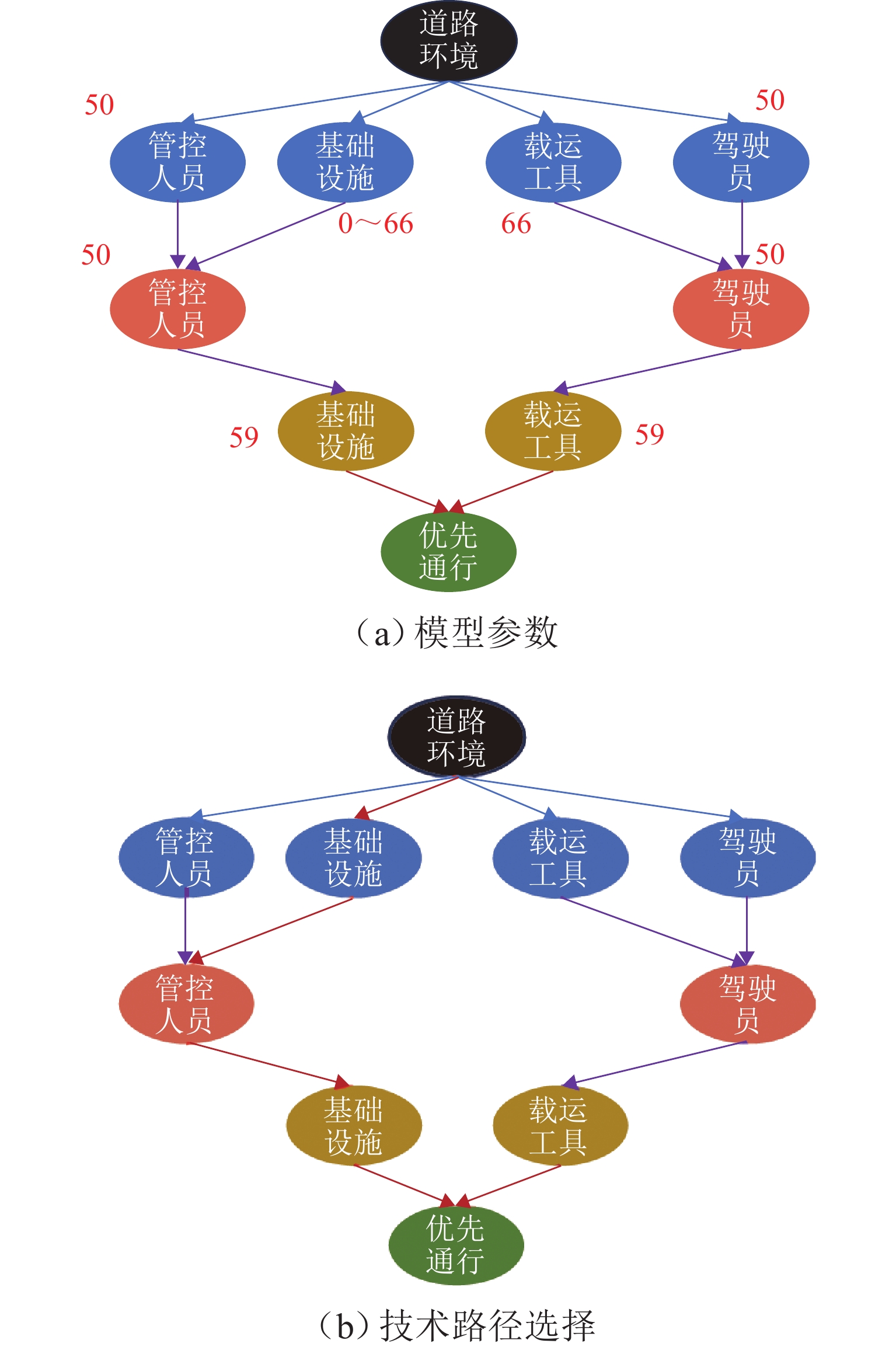
图 7 部分自主阶段ATS演进分析
Figure 7. Evolution analysis of ATS at the partially autonomous stage
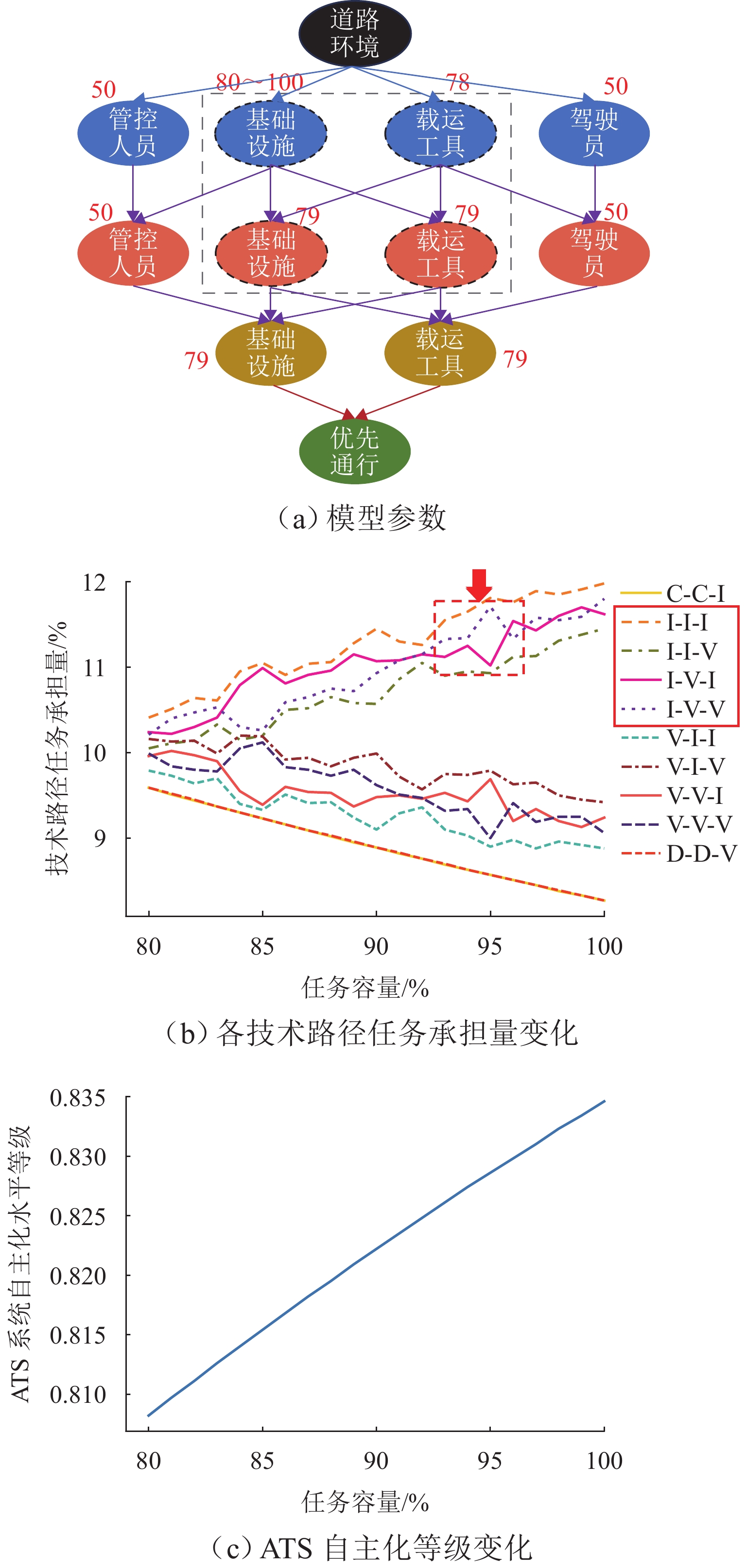
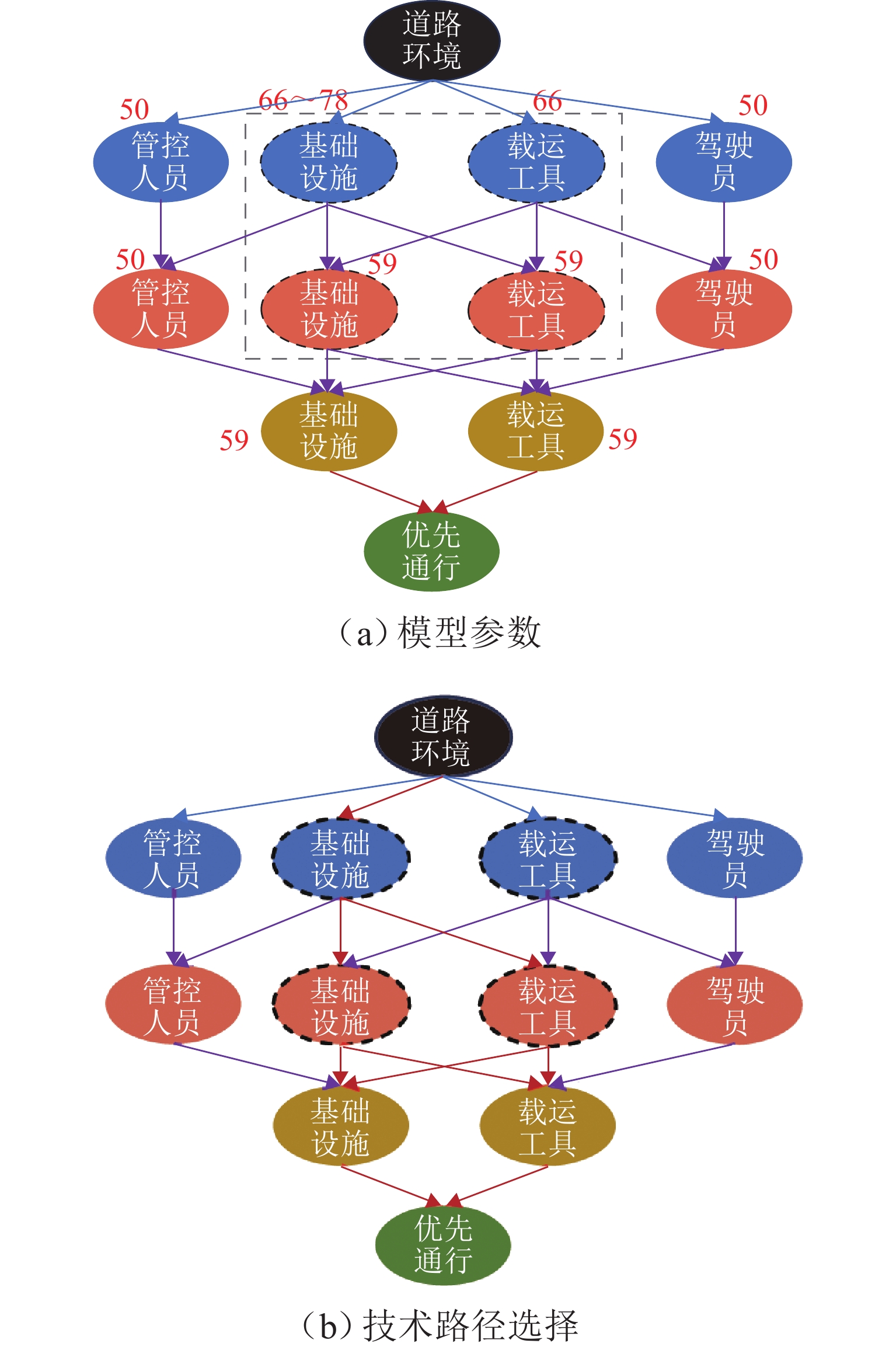
图 10 提升感知主体层信息收集能力模型演进分析
Figure 10. Evolution analysis of models for enhancing information collection capability of the perception entity layer
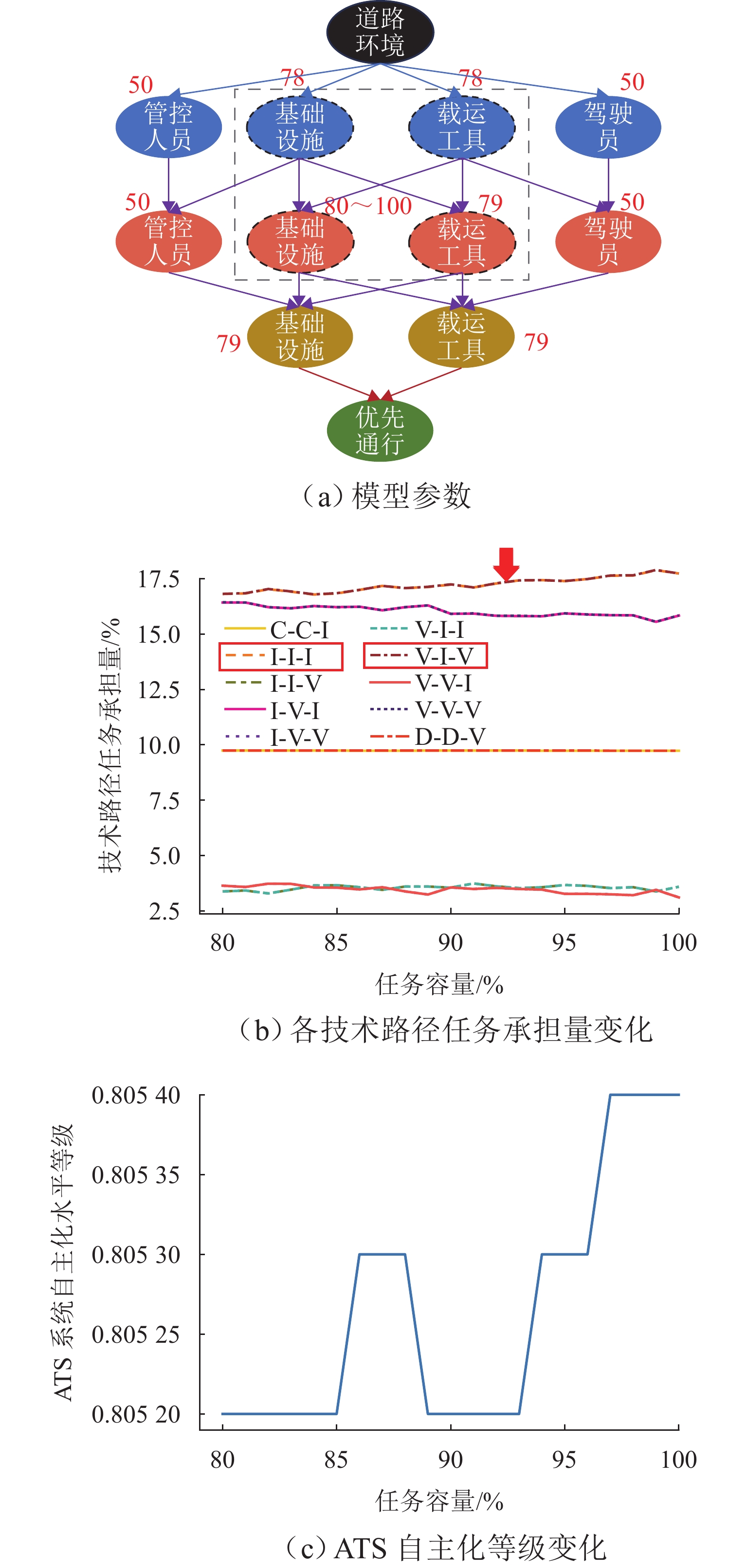
图 11 提升决策主体层决策能力模型演进分析
Figure 11. Evolution analysis of models for enhancing decision-making capability of the decision-making entity layer
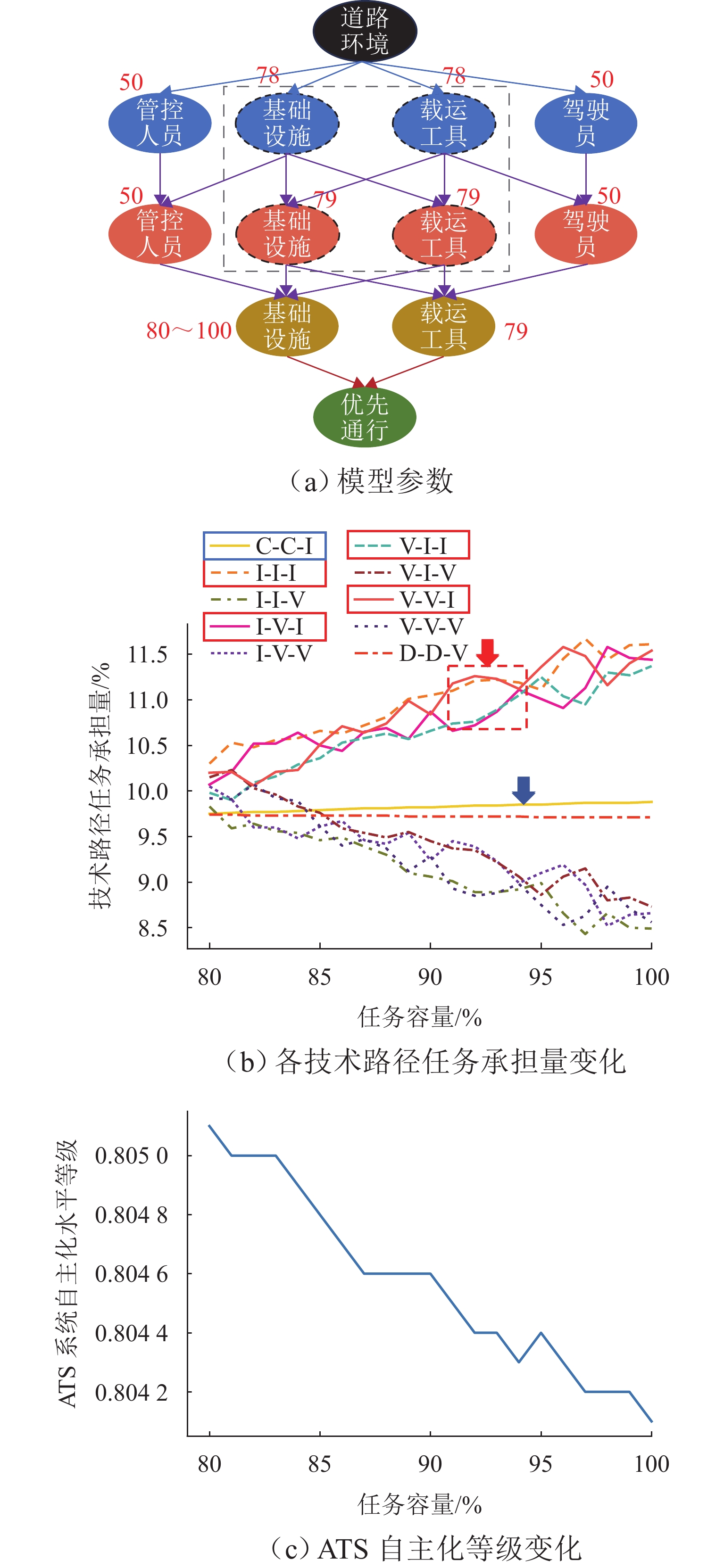
图 12 提升控制主体层控制能力模型演进分析
Figure 12. Evolution analysis of models for enhancing control capability of the control entity layer
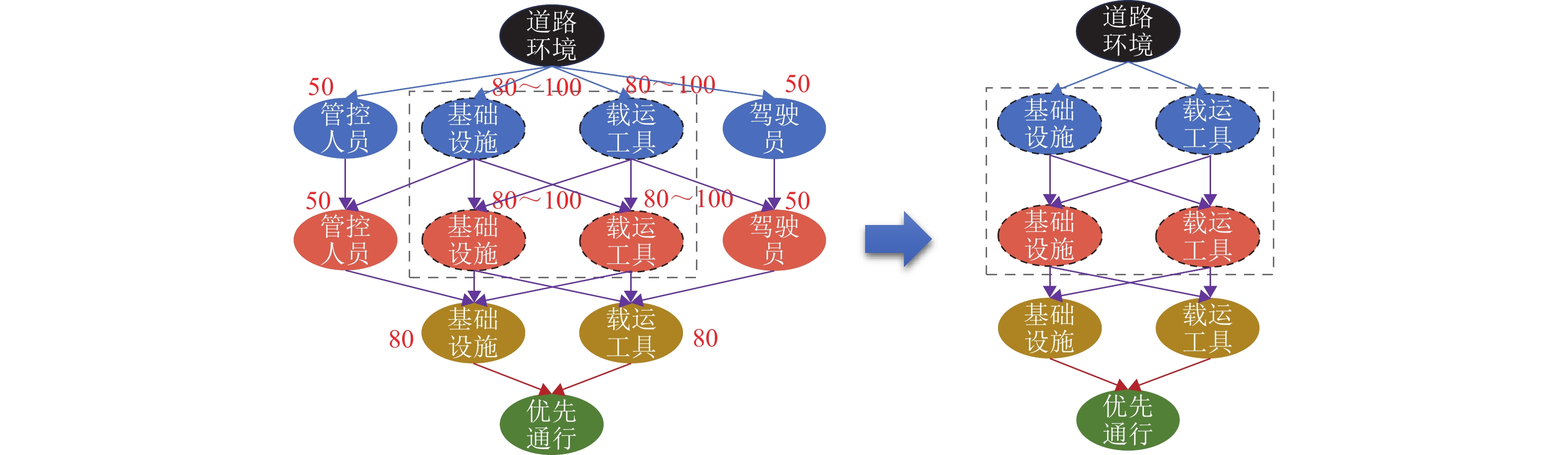
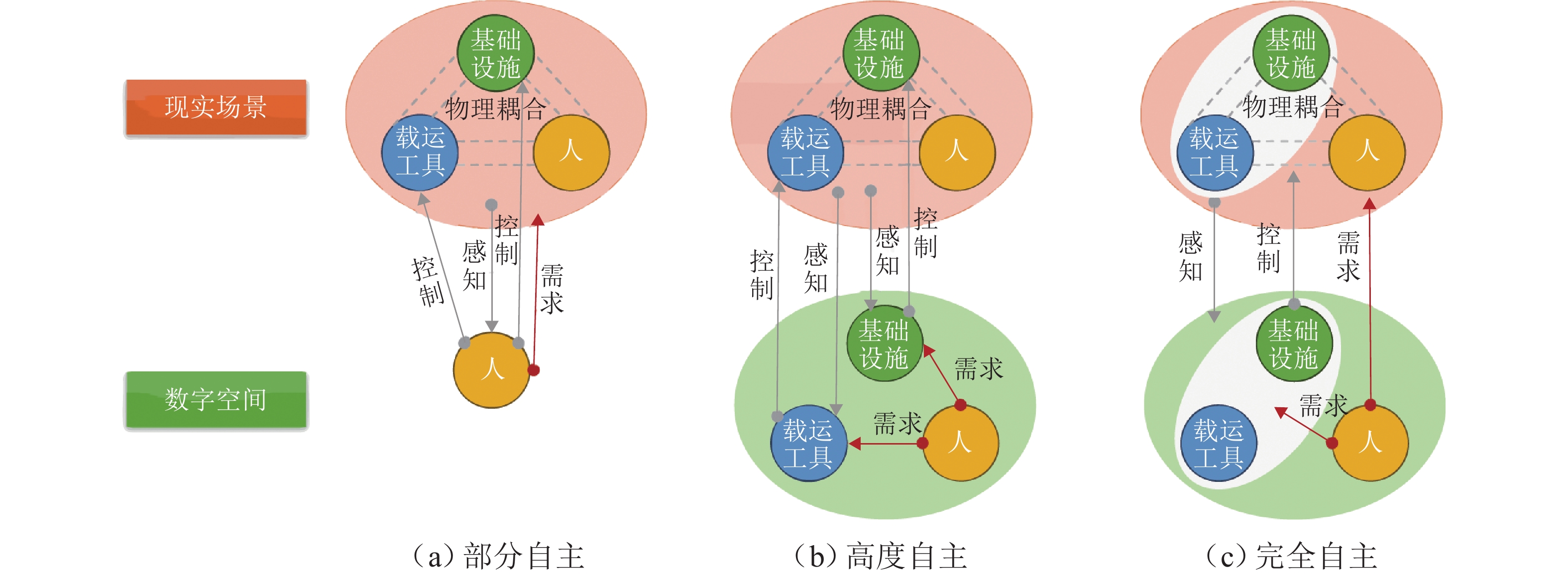
图 13 高度自主阶段到完全自主阶段模型架构演变
Figure 13. Model architecture evolution from highly autonomous stage to fully autonomous stage
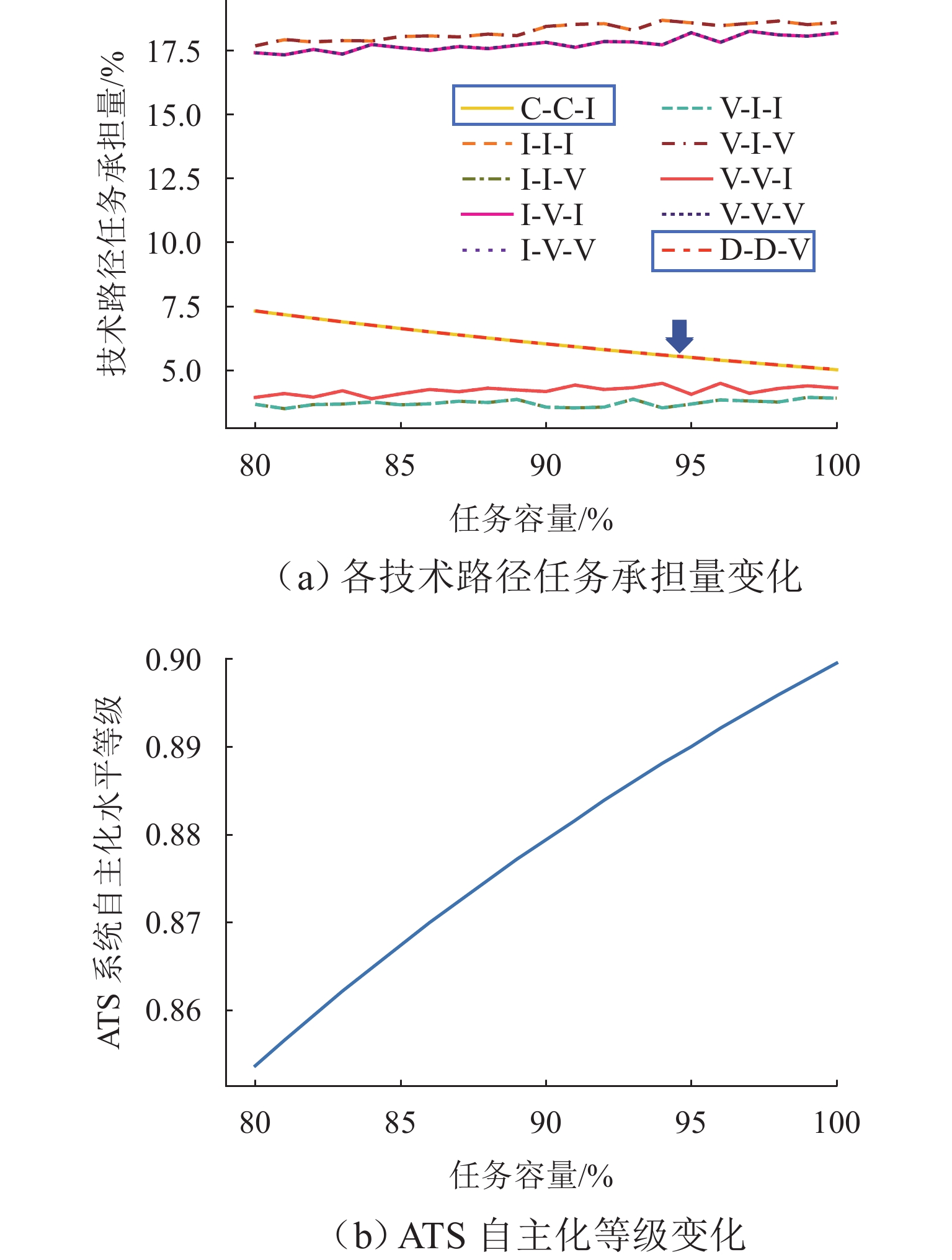
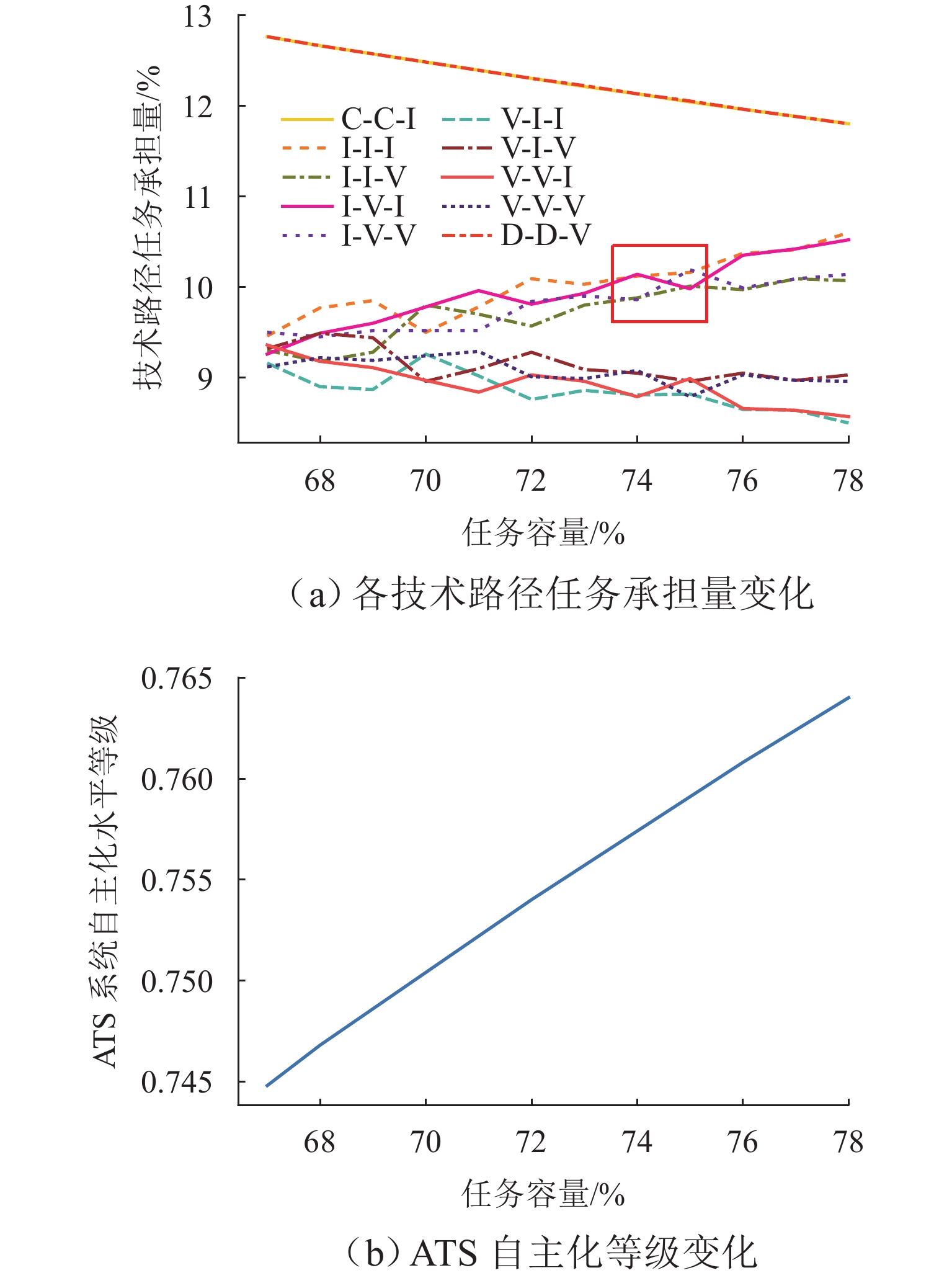
图 14 高度自主到完全自主阶段模型演进分析
Figure 14. Model evolution analysis from highly autonomous stage to fully autonomous stage
表 1 ATS自主化水平分级
Table 1. ATS autonomy level classification
自主化阶段 评估等级 人类参与程度/% 部分自主 0.56 44 高度自主 0.75 25 完全自主 0.91 9  下载: 导出CSV
下载: 导出CSV
表 2 各类主体任务容量
Table 2. Task capacity of various entities
% 自主化阶段 感知主体层 决策主体层 控制主体层 部分自主 66 59 59 高度自主 78 79 79 完全自主 94 89 89
下载: 导出CSV
表 3 人与机器阻力增长系数
Table 3. Human/machine resistance growth factor
对象 自主化阶段 $ {\alpha } $ $ {\beta } $ 机器 部分自主 0.16 6.2 高度自主 0.14 7.0 完全自主 0.11 8.8 人 0.40 4.0
下载: 导出CSV
-
[1] 国家统计局. 中国统计年鉴2025 [R/OL]. 2025-10-13. https://www.stats.gov.cn/sj/ndsj/2025/indexch.htm. [2] Nie Y Y, Jiang J H, Nie Y Y, et al. The impact of highway transportation infrastructure on carbon emissions in the Yangtze river delta region[J]. Sustainability, 2024, 16(17): 7515. doi: 10.3390/su16177515 [3] 张可, 齐彤岩, 刘冬梅, 等. 中国智能交通系统(ITS)体系框架研究进展[J]. 交通运输系统工程与信息, 2005, 5(5): 10-15. doi: 10.3969/j.issn.1009-6744.2005.05.002Zhang Ke, Qi Tongyan, Liu Dongmei, et al. The latest achievements of Chinese national ITS architecture[J]. Communication and Transportati0n Systems Engineering and Information, 2005, 5(5): 10-15. doi: 10.3969/j.issn.1009-6744.2005.05.002 [4] Lusco T. ARC-IT architecture reference for cooperative and intelligent transportation[EB/OL]. [2024-11-13]. https://www.arc-it.net/. [5] Frame F. The FRAME architecture[EB/OL]. [2024-11-23]. https://frame-online.eu/frame-architecture/. [6] Aoyama K I. Universal traffic management system (UTMS) in Japan[C]//Proceedings of VNIS’94 - 1994 Vehicle Navigation and Information Systems Conference. Yokohama: IEEE, 2002: 619-622. [7] Shladover S E. Connected and automated vehicle systems: introduction and overview[J]. Journal of Intelligent Transportation Systems, 2018, 22(3): 190-200. doi: 10.1080/15472450.2017.1336053 [8] Jia L M, Chen X Y, Ma X P, et al. On autonomous transportation systems[J]. Smart and Resilient Transportation, 2022, 4(2): 66-77. doi: 10.1108/SRT-06-2022-0015 [9] 国务院. 中国交通的可持续发展[EB/OL]. (2020-12-22) [2024-11-14]. http://www.scio.gov.cn/zfbps/ndhf/2020n/202207/t20220704_130660. [10] Huang K, Chen C T, Xiao Y, et al. A function area division approach for autonomous transportation system based on text similarity[J]. Journal of Advanced Transportation, 2023, 2023(1): 2570824. doi: 10.1155/2023/2570824 [11] Creß C, Bing Z S, Knoll A C. Intelligent transportation systems using roadside infrastructure: a literature survey[J]. IEEE Transactions on Intelligent Transportation Systems, 2024, 25(7): 6309-6327. doi: 10.1109/TITS.2023.3343434 [12] 魏伟, 郑来, 蔡铭. 面向自主式交通的智能交通系统用户需求研究[J]. 交通科技与经济, 2022, 24(2): 1-7. doi: 10.19348/j.cnki.issn1008-5696.2022.02.001Wei Wei, Zheng Lai, Cai Ming. Research on user needs of intelligent transportation system for autonomous transportation[J]. Technology & Economy in Areas of Communications, 2022, 24(2): 1-7. doi: 10.19348/j.cnki.issn1008-5696.2022.02.001 [13] 裴建中. 道路工程学科前沿进展与道路交通系统的代际转换[J]. 中国公路学报, 2018, 31(11): 1-10. doi: 10.3969/j.issn.1001-7372.2018.11.001Pei Jianzhong. Progress of highway engineering and generation upgrading of highway transportation system[J]. China Journal of Highway and Transport, 2018, 31(11): 1-10. doi: 10.3969/j.issn.1001-7372.2018.11.001 [14] You L L, He J S, Zhao J J, et al. A federated mixed logit model for personal mobility service in autonomous transportation systems[J]. Systems, 2022, 10(4): 117. doi: 10.3390/systems10040117 [15] Zhou Z S, Cai M, Deng Z L, et al. Cyber physical system modeling and analysis in typical scenarios based on the theory of autonomous transportation system[C]//Quality, Reliability, Security and Robustness in Heterogeneous Systems. Cham: Springer Nature Switzerland, 2024: 165-177. [16] Liang C, Chen Z W, Yang L, et al. Physical architecture simulation based on system dynamics modelling for an autonomous transportation system scenario[J]. Journal of Advanced Transportation, 2023, 2023(1): 9390468. doi: 10.1155/2023/9390468 [17] U. S. Department of Transportation. Saving lives with connectivity: a plan to accelerate v2x deployment [EB/OL]. (2024-11-08)[2024-12-14]. https://www.its.dot.gov/research_areas/emerging_tech/pdf/Accelerate_V2X_Deployment.pdf. [18] U.S. Department of Transportation. DOT Releases National Deployment Plan for Vehicle-to-Everything (V2X) Technologies to Reduce Death and Serious Injuries on America’s Roadways [EB/OL]. (2024-08-16)[2024-12-14]. https://highways.dot.gov/newsroom/usdot-releases-national-deployment-plan-vehicle-everything-v2x-technologies-reduce-death. [19] 方明辉, 由林麟, 郝迈, 等. 自主式交通系统架构自适应演进方法[J]. 中山大学学报, 2024, 63(4): 115-123.Fang Minghui, You Linlin, Hao Mai, et al. The adaptive evolution mechanism of autonomous transportation system architecture[J]. Acta Scientiarum Naturalium Universitatis Sunyatseni, 2024, 63(4): 115-123. [20] 徐光明, 刘昕怡, 钟林环, 等. 自主式交通系统逻辑架构可靠性分析与评价[J]. 铁道科学与工程学报, 2022, 19(10): 2852-2861.Xu Guangming, Liu Xinyi, Zhong Linhuan, et al. Reliability analysis and evaluation of logical architecture for autonomous transportation system[J]. Journal of Railway Science and Engineering, 2022, 19(10): 2852-2861. [21] You L L, Hao M, Sun J, et al. Toward a personalized autonomous transportation system: vision, challenges, and solutions[J]. The Innovation, 2024, 5(6): 100704. doi: 10.1016/j.xinn.2024.100704 [22] You L L, He J S, Wang W, et al. Autonomous transportation systems and services enabled by the next-generation network[J]. IEEE Network, 2022, 36(3): 66-72. doi: 10.1109/MNET.006.2100542 [23] Liu Y, Tuo H N, He M F, et al. Mapping relationship discovery of multidimensional architectures in autonomous transportation system based on text-matching model[J]. Journal of Advanced Transportation, 2023, 2023(1): 8707205. doi: 10.1155/2023/8707205 [24] Yu Y Z, Gou C, Xiong C. Intergeneration division based on key component analysis in an autonomous transportation system using the natural language processing method[J]. Journal of Advanced Transportation, 2023, 2023(1): 5850876. doi: 10.1155/2023/5850876 [25] Bureau of Public Roads. Traffic Assignment Manual[M]. Washington: Urban Planning Division, 1964. [26] 杜家豪, 秦娜, 贾鑫明, 等. 基于联邦学习的多线路高速列车转向架故障诊断[J]. 西南交通大学学报, 2024, 59(1): 185-192.Du Jiahao, Qin Na, Jia Xinming, et al. Fault diagnosis of high-speed train bogies on multiple lines based on federated learning[J]. Journal of Southwest Jiaotong University, 2024, 59(1): 185-192. [27] 徐进, 陈钦, 陈正委, 等. 适应无人驾驶汽车的道路设施设计综述[J]. 西南交通大学学报, 2023, 58(6): 1366-1377. doi: 10.3969/j.issn.0258-2724.20220007Xu Jin, Chen Qin, Chen Zhengwei, et al. Review of roadway facility design for self-driving cars[J]. Journal of Southwest Jiaotong University, 2023, 58(6): 1366-1377. doi: 10.3969/j.issn.0258-2724.20220007 -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 85
- HTML全文浏览量: 89
- PDF下载量: 9
- 被引次数: 0