

Method of Determining Design Value of Rockfall Block Size Based on the Return Period
-
摘要:
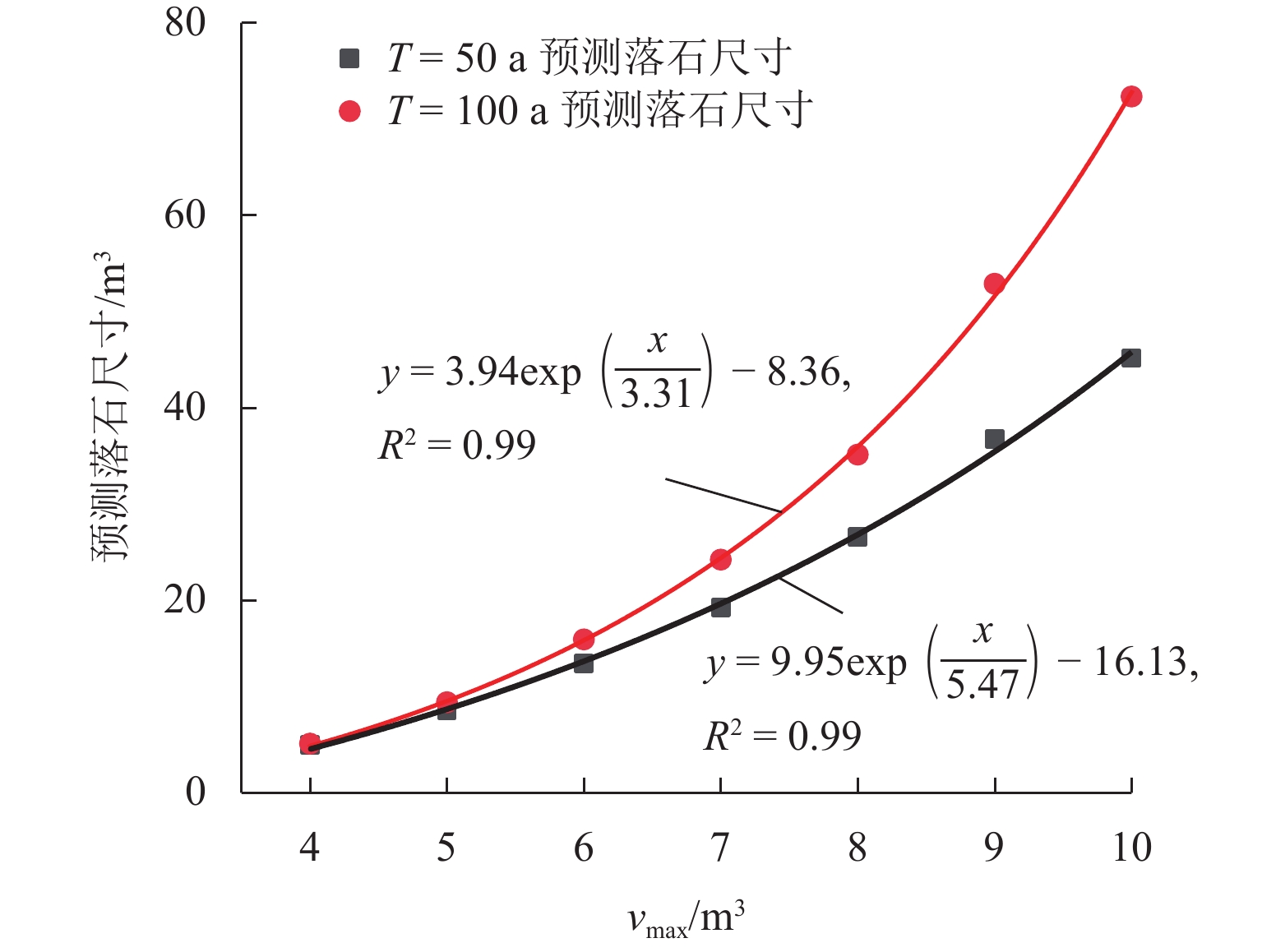
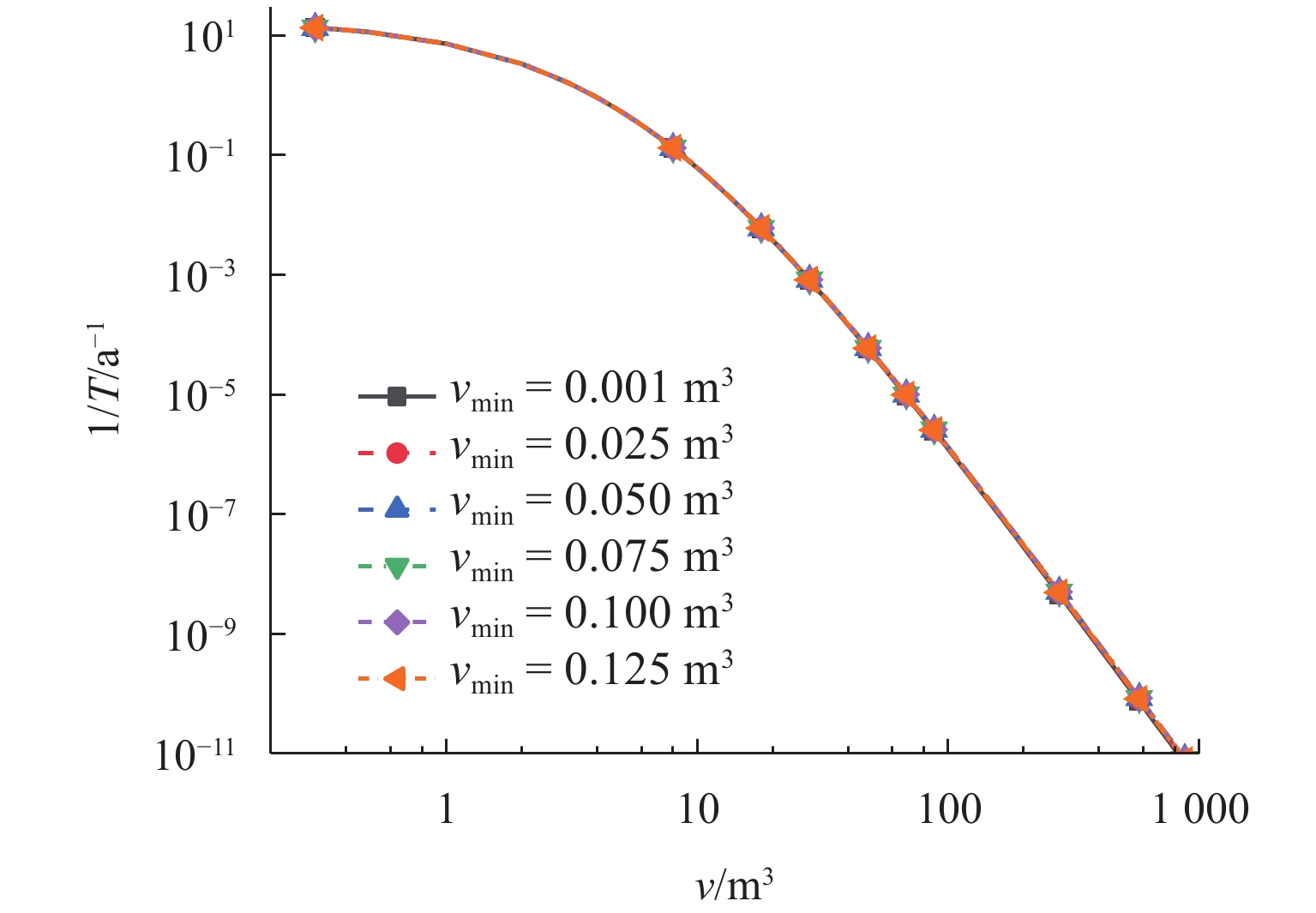
山区交通落石事件频发且具有突发性和随机性,基于概率的防护结构可靠性设计是降低灾害风险的必要和有效手段,然而,作为设计基本参数的落石尺寸设计值的确定方法还不明确,使得可靠性设计不能有效进行. 介绍基于泊松-广义帕累托分布(GPD)复合模型的落石尺寸-重现期预测方法,结合宝成铁路白—上段落石记录数据,进行GPD阈值选取,并分析记录中缺失的最大、最小落石尺寸对阈值选取和对预测结果的影响;与地震作用标准值超越概率对应,提出以“小落石不坏、中落石可修、大落石不塌”三水准设防为标准的落石尺寸设计值确定方法. 研究表明:记录中缺失的最大落石尺寸对阈值选取影响小,但对落石尺寸预测结果影响大,与重现期对应的落石尺寸预测值随设定的最大落石尺寸呈指数型增大趋势,而记录的最小落石尺寸对阈值选取和预测结果的影响都较小;以宝成铁路白—上段落石记录数据为例,根据选取出的合理阈值,设定不同最大落石尺寸值,利用本文方法,预测得到宝成铁路白—上段50、100、
1000 、10000 a重现期落石尺寸区间范围,计算得到50、100 a设计基准期三水准设防标准对应的落石尺寸标准值即设计值,可为类似工程设计提供参考.Abstract:The rockfall events on transport lines in mountainous areas occur frequently and are sudden and random. Probability-based reliability design of protective structures is a necessary and effective means to reduce the hazard risk. However, the method of determining the design value of rockfall size, as a basic parameter of the design, is still unclear, making the reliability design fail to be carried out effectively. The prediction method of rockfall size and the return period was introduced based on the Poisson-generalized Pareto distribution (GPD) composite model. According to the rockfall record data of the Bai−Upper section of Baoji−Chengdu Railway, the GPD threshold was selected, and the impact of the missing maximum and minimum rockfall sizes (vmax and vmin) in the record on the threshold selection and prediction results was analyzed. Corresponding to the exceedance probability of the standard value of earthquake action, a method of determining the design value of rockfall size was proposed, which was based on the three-level protection standard featuring “the structure doesn’t break under small rockfalls, can be repaired under medium rockfalls, and doesn’t collapse under large rockfalls”. The results show that the missing maximum rockfall size in the record has a small impact on the threshold selection but a large impact on the prediction results of the rockfall size. The prediction value of rockfall size corresponding to the return period increases exponentially with the set maximum rockfall size, while the recorded minimum rockfall size has less impact on both the threshold selection and the prediction results. By taking the record data of the Bai−Upper section of Baoji−Chengdu Railway as an example, according to the selected reasonable threshold, different maximum rockfall size values are set. By using the method presented in this paper, the interval range of rockfall size in return periods of 50, 100, 1 000, and 10 000 years on the Bai−Upper section of Baoji−Chengdu Railway is predicted, and the standard value (design value) of rockfall size corresponding to the three-level protection standard in design reference periods of 50 and 100 years is calculated, which can provide a reference for similar engineering designs.
-
Key words:
- protective structure /
- rockfall size /
- return period /
- generalized Pareto distribution /
- design value
-
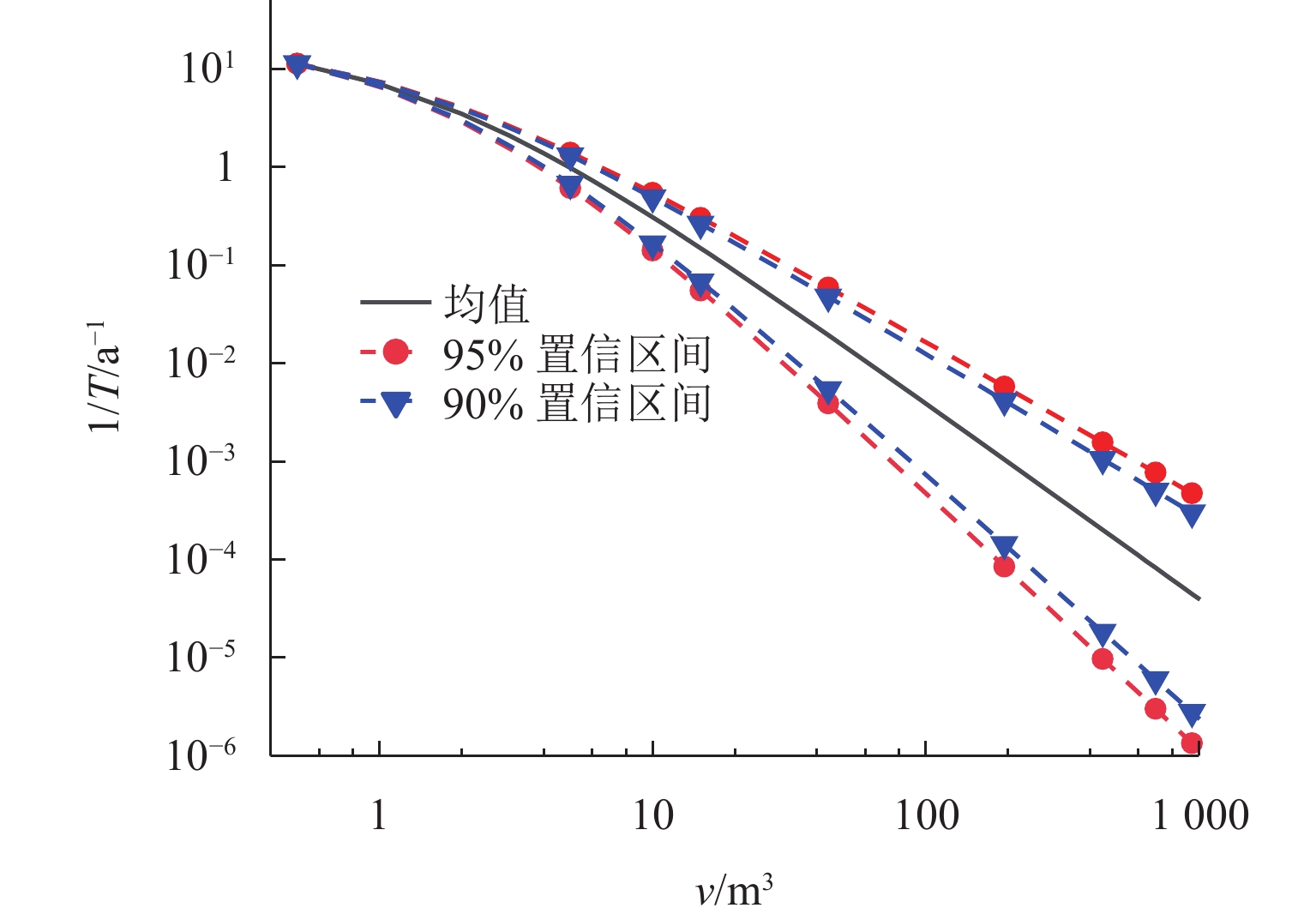
图 1 年发生频率-落石尺寸关系
Figure 1. Relationships between annual frequency of occurrence and rockfall size
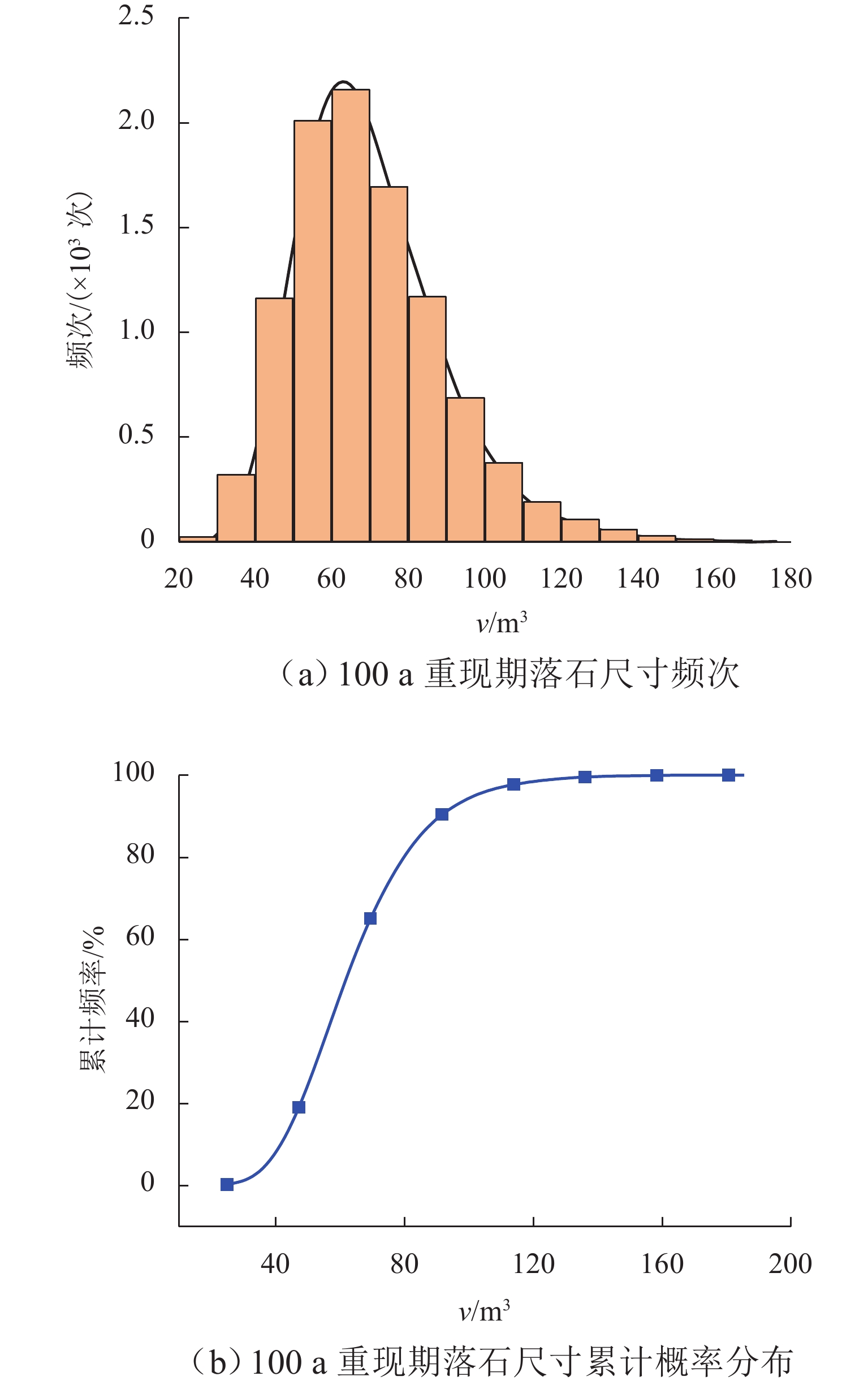
图 2 100 a重现期落石尺寸频次与累积概率分布
Figure 2. Frequency and cumulative probability distribution of rockfall size during 100-year return period
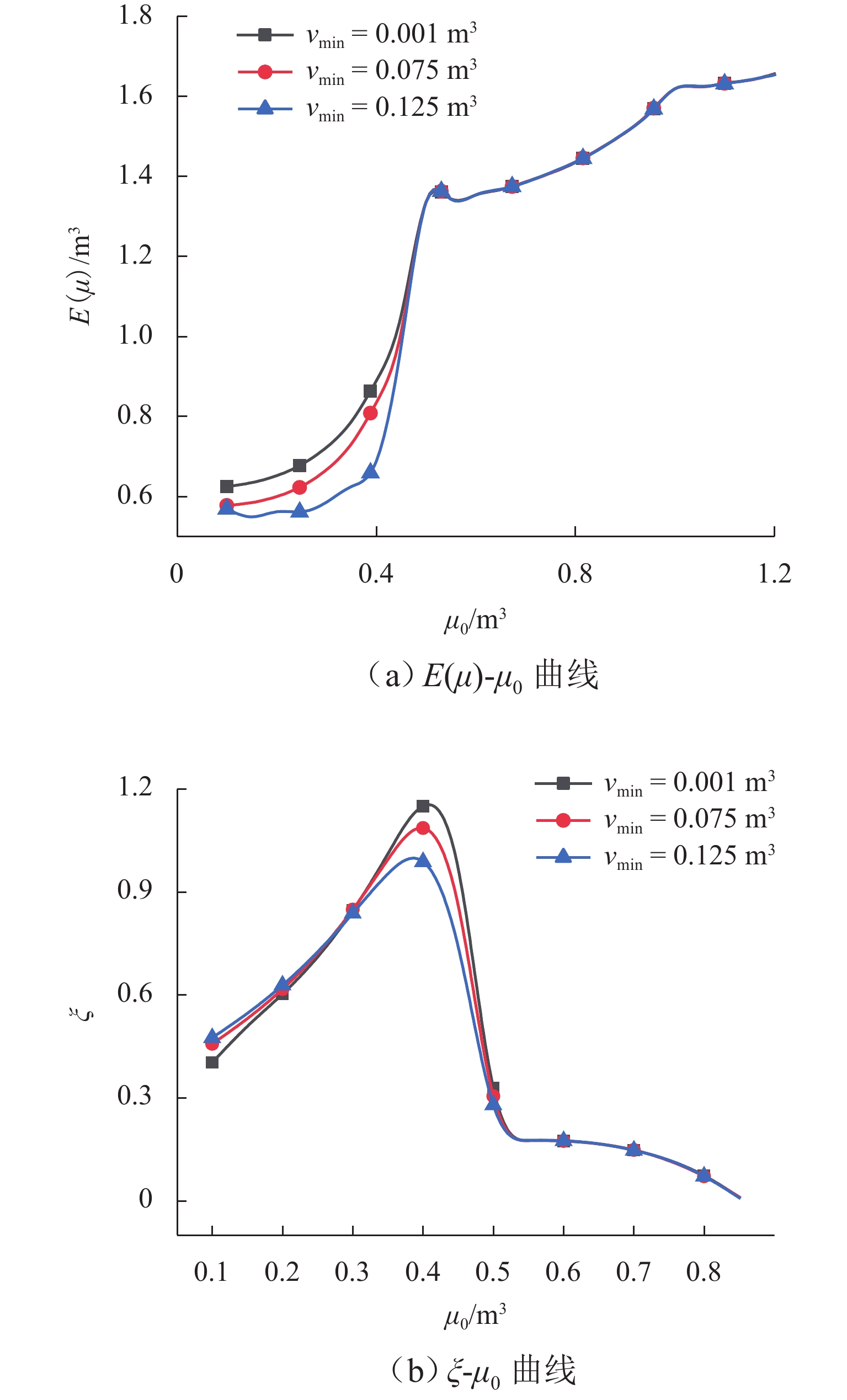
图 7 不同vmin的E(μ)-μ0和ξ-μ0曲线
Figure 7. E(μ)-μ0 and ξ-μ0 curves with different vmin values
年份 v>3.0 m3 2.0 m3<v≤3.0 m3 1.5 m3<v≤2.0 m3 1.0 m3<v≤1.5 m3 0.5 m3<v≤1.0 m3 v≤0.5 m3 合计 1961 年 1 1 0 10 12 1962 年 4 1 2 2 17 26 1963 年 4 2 1 4 30 41 1964 年 3 4 2 3 5 54 71 1965 年 1 2 2 45 50 1966 年 5 2 3 12 99 121 1967 年 1 1 1 5 8 1969 年 3 1 5 26 35 1970 年 1 1 5 16 51 74 1971 年 1 1 2 3 3 30 40 1972 年 3 2 3 3 2 39 52 合计 23 15 10 24 52 406 530 分占比例% 4.34 2.83 1.89 4.53 9.81 76.6 100.00  下载: 导出CSV
下载: 导出CSV
表 2 GPD参数σ、ξ估计
Table 2. Estimated results of GPD parameters ξ and σ
条件 ξ σ 90% 置信区间 [0.40,0.60] [0.86,1.02] 95% 置信区间 [0.38,0.63] [0.84,1.04] 均值 0.50 0.94
下载: 导出CSV
表 3 各重现期对应落石尺寸均值及其置信区间
Table 3. Mean rockfall sizes and their confidence intervals during different return periods
m3 重现期/a 均值 90% 置信区间 95% 置信区间 vmax=4.0 m3 vmax=6.0 m3 vmax=4.0 m3 vmax=6.0 m3 vmax=4.0 m3 vmax=6.0 m3 50 4.93 13.42 [4.28,5.89] [11.30,14.92] [4.13, 6.12] [11.03, 15.26] 100 5.09 15.91 [4.39,6.12] [13.34,17.86] [4.23, 6.38] [12.89,18.72] 1000 5.41 26.75 [4.60,6.69] [21.23,31.83] [4.42, 7.01] [20.28,33.38] 10000 5.58 42.99 [4.70,7.02] [31.95,53.43] [4.51, 7.39] [30.21,56.86]
下载: 导出CSV
表 4 各设计基准期落石尺寸标准值
Table 4. Standard values of rockfall size in different design reference periods
m3 设计基准期/a 设防
水准T/a 1/T/a− 1 1−1/T N 年不超越
概率
((1− 1/T)N)N 年超越
概率
(1−(1−1/T)N)与 T 对应的
落石尺寸标准值vmax=4.0 m3 vmax=6.0 m3 50 Ⅰ 50 0.0200 0.9800 0.36 0.64 4.93 13.4 Ⅱ 475 0.0021 0.9979 0.90 0.10 5.33 22.8 Ⅲ 2475 0.0004 0.9996 0.98 0.02 5.49 32.4 100 Ⅰ 100 0.0100 0.9900 0.37 0.63 5.09 15.9 Ⅱ 900 0.0011 0.9989 0.89 0.11 5.40 26.2 Ⅲ 5000 0.0002 0.9998 0.98 0.02 5.54 37.4
下载: 导出CSV
-
[1] MARCHELLI M, COLTRINARI G, ALFARO DEGAN G, et al. Towards a procedure to manage safety on construction sites of rockfall protective measures[J]. Safety Science, 2023, 168: 106307.1-106307.8. [2] 中华人民共和国住房和城乡建设部. 铁路工程结构可靠性设计统一标准:GB 50216—2019[S]. 北京:中国计划出版社,2019. [3] 中华人民共和国交通运输部. 公路工程结构可靠性统一标准:JTG 2120—2020[S]. 北京:人民交通出版社,2020. [4] 国家铁路局. 铁路隧道设计规范:TB 10003—2016[S]. 北京:中国铁道出版社, 2017. [5] 中华人民共和国交通运输部. 公路隧道设计规范 第一册 土建工程:JTG 3370.1—2018[S]. 北京:人民交通出版社, 2019. [6] 中华人民共和国住房和城乡建设部. 建筑结构可靠性设计统一标准:GB 50068—2018[S]. 北京:中国建筑工业出版社. [7] 铁道第二勘测设计院. 铁路工程设计技术手册. 隧道[M]. 北京:中国铁道出版社,1999. [8] 曾廉. 明洞顶设计荷载的研究[J]. 铁路标准设计通讯,1974(7): 3-17. [9] ILLEDITSCH M, PREH A. Determination of meaningful block sizes for rockfall modelling[J]. Natural Hazards, 2024, 120(6): 5685-5710. doi: 10.1007/s11069-024-06432-4 [10] STELZER G, BICHLER A. ONR 24810–A comprehensive guideline for building better rockfall protection structures[C]//64th Annual Highway Geology Symposium. New Hampshire: Highway Geology Symposium, 2013. [11] MARCHELLI M, DE BIAGI V, PEILA D. Reliability-based design of rockfall passive systems height[J]. International Journal of Rock Mechanics and Mining Sciences, 2021, 139: 104664.1-104664.9. [12] MARCHELLI M, DE BIAGI V, PEILA D. Reliability-based design of protection net fences: influence of rockfall uncertainties through a statistical analysis[J]. Geosciences, 2020, 10(8): 280.1-280.24. [13] DE BIAGI V, MARCHELLI M, PEILA D. Reliability analysis and partial safety factors approach for rockfall protection structures[J]. Engineering Structures, 2020, 213: 110553.1-110553.1. [14] Austrian Standards Institute. Technical protection against rockfall-terms and definitions, effects of actions, design, monitoring and maintenance: ONR 24810[S]. Vienna: [s.n.], 2017. [15] MELZNER S, ROSSI M, GUZZETTI F. Impact of mapping strategies on rockfall frequency-size distributions[J]. Engineering Geology, 2020, 272: 105639.1-105639.11. [16] LAIMER H J. Determination of rockfall design blocks in Upper Triassic limestones and Dolomites (Dachstein Formation, Northern Calcareous Alps)[J]. Bulletin of Engineering Geology and the Environment, 2020, 79(3): 1581-1590. doi: 10.1007/s10064-019-01640-w [17] DE BIAGI V, LIA NAPOLI M, BARBERO M, et al. Estimation of the return period of rockfall blocks according to their size[J]. Natural Hazards and Earth System Sciences, 2017, 17(1): 103-113. doi: 10.5194/nhess-17-103-2017 [18] CURCEAC S, ATKINSON P M, MILNE A, et al. An evaluation of automated GPD threshold selection methods for hydrological extremes across different scales[J]. Journal of Hydrology, 2020, 585: 124845.1-124845.15. [19] STORMY A. MATLAB[M]. Fifth edition. Boston: [s.n.], 2019. [20] COLES S. An Introduction to Statistical Modeling of Extreme Values[M]. London: Springer, 2001. [21] 史道济. 实用极值统计方法[M]. 天津:天津科学技术出版社,2006. [22] 仇学艳,王超,秦崇仁. 阈值法在河海工程设计中的应用[J]. 水利学报,2001(8): 32-37. doi: 10.3321/j.issn:0559-9350.2001.08.006QIU Xueyan, WANG Chao, QIN Chongren. The application of threshold procedure in design of river and coastal engineering[J]. Shuili Xuebao, 2001(8): 32-37. doi: 10.3321/j.issn:0559-9350.2001.08.006 [23] PHILIP J, DAVID R, JENNY W, et al. Uncertainties in return from extreme value analysis of peaks over threshold using the generalised Pareto distribution[J]. Ocean Engineering, 2021, 220: 107725.1-107725.17. [24] THOMAS R K, ILARIA P. Use of peak over threshold data for flood frequency estimation: An application at the UK national scale.[J]. Jounal of Hydrology, 2023, 626(5): 130235.1-130235.31. [25] 中华人民共和国住房和城乡建设部. 建筑抗震设计规范GB 50011—2010(2016版)[S]. 北京:中国建筑工业出版社,2016. -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 374
- HTML全文浏览量: 118
- PDF下载量: 58
- 被引次数: 0