

Artificial Intelligence Adaptive Recognition Method for Tunnel Lane Lines in Autonomous Driving
-
摘要:
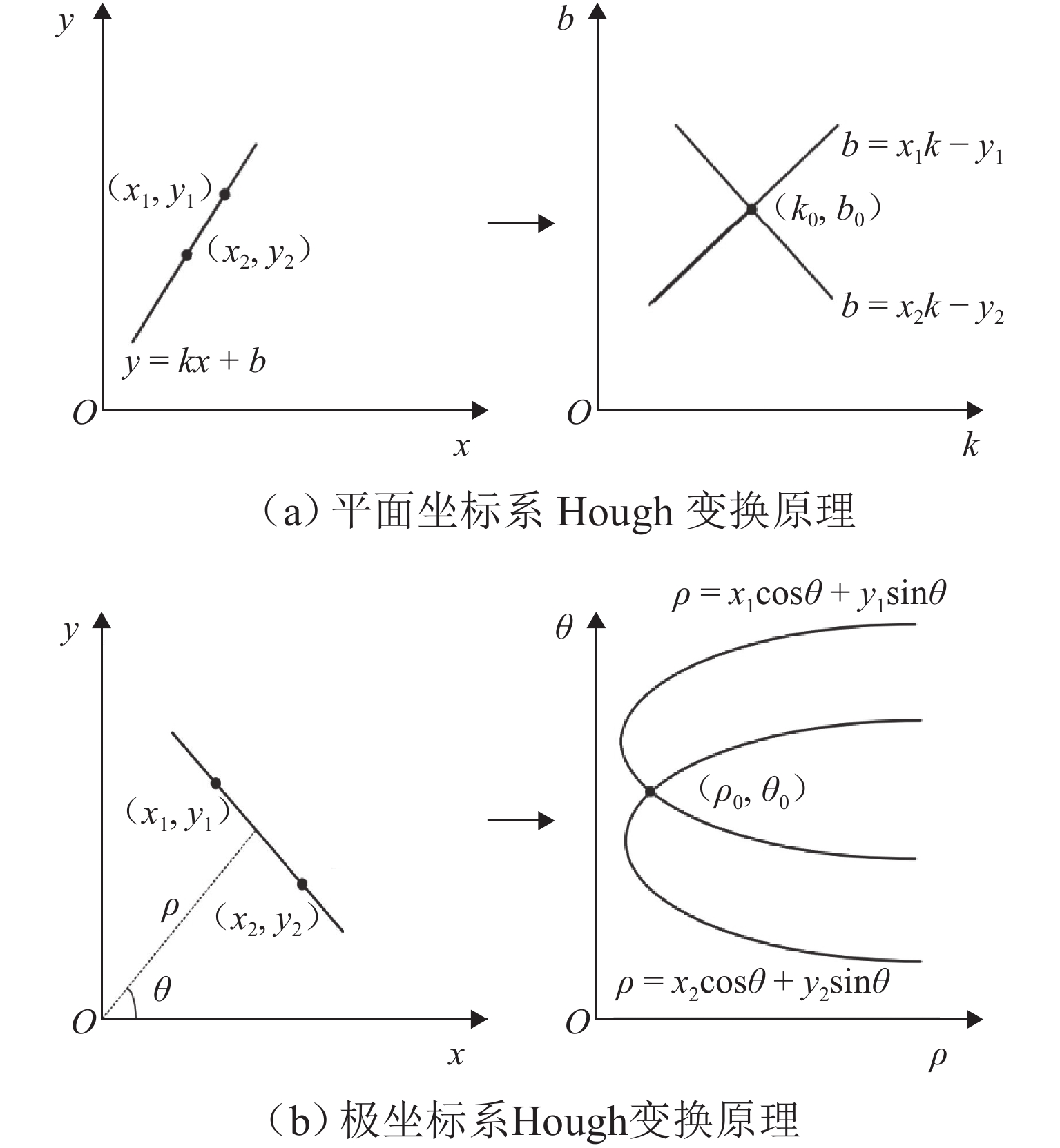
针对公路隧道存在光线突变、昏暗以及眩光等复杂光环境问题,本文提出一种基于嵌入式AI (artificial intelligence)视觉的车道线识别方法——IHLS (improved Hough & least squares),该方法利用改进的Hough变换算法将车道特征点进行霍夫变换以检测直线,并利用最小二乘法(least squares,LS)进行曲线拟合识别弯曲车道线;通过在车载摄像头上内嵌AI视觉处理算法对捕获图像进行实时亮度检测和AI增强,使用Zero-DCE (zero-reference deep curve estimation)模型增强图像,采用改进最大类间方差法(Otsu)进行边缘检测并通过像素统计划分DROI (dynamic region of interest),用导向滤波增强和平滑图像,以提升车道线识别准确率. 以青兰高速六盘山隧道为原型,对所提识别方法开展试验,试验结果表明:IHLS算法相较LS算法,其平均交并比(MIoU)指标提升4.14%,平均准确率(AP)提升3.08%,运行时间(RT)增加0.01 s;对比Hough变换,IHLS算法的MIoU指标提升4.18%,AP提升2.88%,RT增加0.01 s. 经内嵌AI视觉处理的IHLS算法解决了机器视觉过曝光、色彩失调、失真等光学问题,实现了复杂光环境下车道线的实时识别与跟踪.
Abstract:In view of the complex light environment problems such as sudden light changes, dimness, and glare in highway tunnels, a lane line recognition method, improved Hough & least squares (IHLS), based on embedded artificial intelligence (AI) is proposed. It used the improved Hough transform algorithm to carry out Hough transform for detecting straight lines at lane feature points, and employed the least squares method (LS) for curve fitting to identify curved lane lines. Real-time brightness detection and AI-based enhancement were performed on the captured image by embedding AI vision processing algorithm on the in-vehicle camera. The image was enhanced by the zero-reference deep curve estimation (Zero-DCE) model. The edge detection was performed by the improved Nobuyuki Otsu method (Otsu method), and the dynamic region of interest (DROI) was divided by pixel statistics. The image was enhanced and smoothed by guided filtering to improve the accuracy of lane line recognition. The experiment on the proposed method was based on the Liupanshan Tunnel of Qingdao-Lanzhou Expressway. Compared with the LS algorithm, the IHLS algorithm shows a mean intersection over union (MIoU) index increased by 4.14%, average precision (AP) increased by 3.08%, and running time (RT) increased by 0.01 s. Compared with Hough transform, the algorithm presents an MIoU index increased by 4.18%, AP increased by 2.88%, and RT increased by 0.01 s. The IHLS algorithm embedded with AI visual processing solves the optical problems such as machine vision overexposure, color imbalance, and distortion, and realizes real-time recognition and tracking of lane lines in complex light environments.
-
Key words:
- lane line recognition /
- highway tunnel /
- deep learning /
- brightness detection /
- image recognition
-
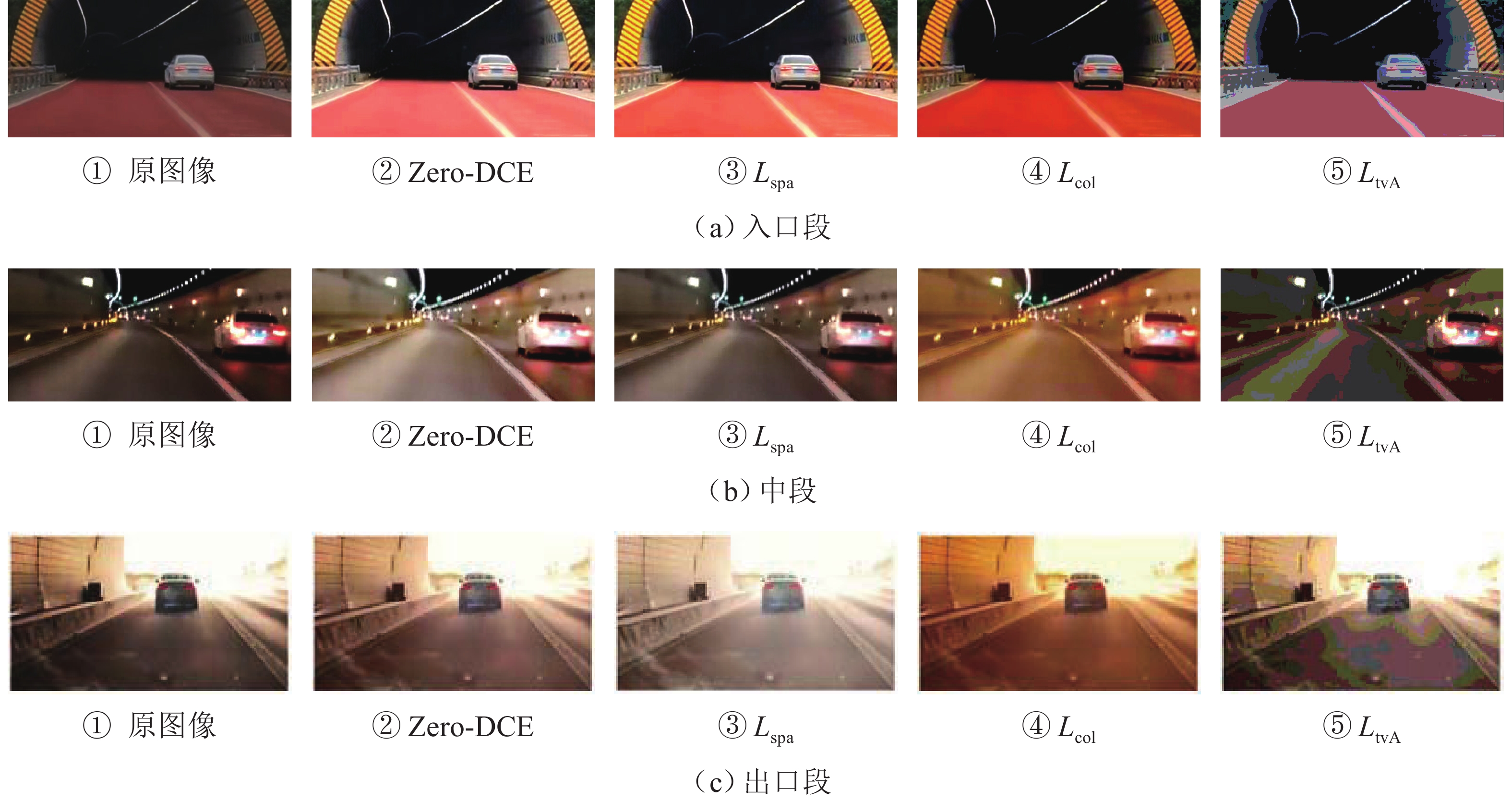
表 1 Zero-DCE图像增强结果对比
Table 1. Comparison of Zero-DCE image enhancement results
增强类型 PSNR1 SSIM1 PSNR2 SSIM2 PSNR3 SSIM3 ZeroDCE 17.353 0.704 16.913 0.658 16.731 0.637 Lspa 17.272 0.694 16.785 0.593 16.625 0.596 Lcol 17.232 0.699 16.737 0.584 16.629 0.598 LtvA 16.981 0.684 16.398 0.507 15.989 0.579  下载: 导出CSV
下载: 导出CSV
表 2 导向滤波处理结果
Table 2. Results of guided filtering
隧道区域 处理类型 原图像 图像二值化 Gamma 校正 像素分布 入口 未处理 ① ② ③ ④ 导向滤波处理 ⑤ ⑥ ⑦ ⑧ 中段 未处理 ⑨ ⑩ ⑪ ⑫ 导向滤波处理 ⑬ ⑭ ⑮ ⑯ 出口 未处理 ⑰ ⑱ ⑲ ⑳ 导向滤波处理 ㉑ ㉒ ㉓ ㉔  下载: 导出CSV
下载: 导出CSV
表 3 DROI划分结果
Table 3. Results of DROI division
隧道区域 DROI 划分 传统 Otus 分割 DROI PSO + Otsu 分割结果 本文引进 PSO + Otsu 分割结果 入口 ① ② ③ ④ 中段 ⑤ ⑥ ⑦ ⑧ 出口 ⑨ ⑩ ⑪ ⑫  下载: 导出CSV
下载: 导出CSV
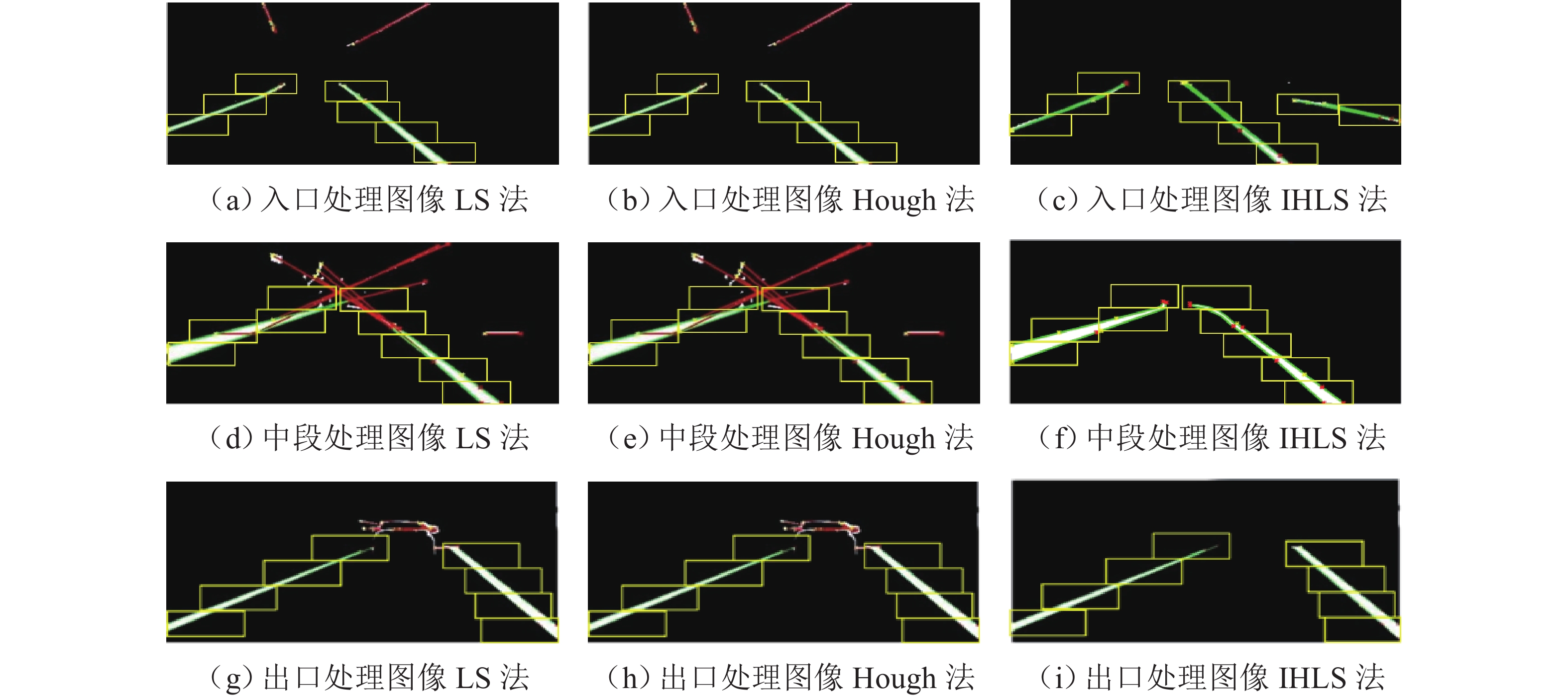
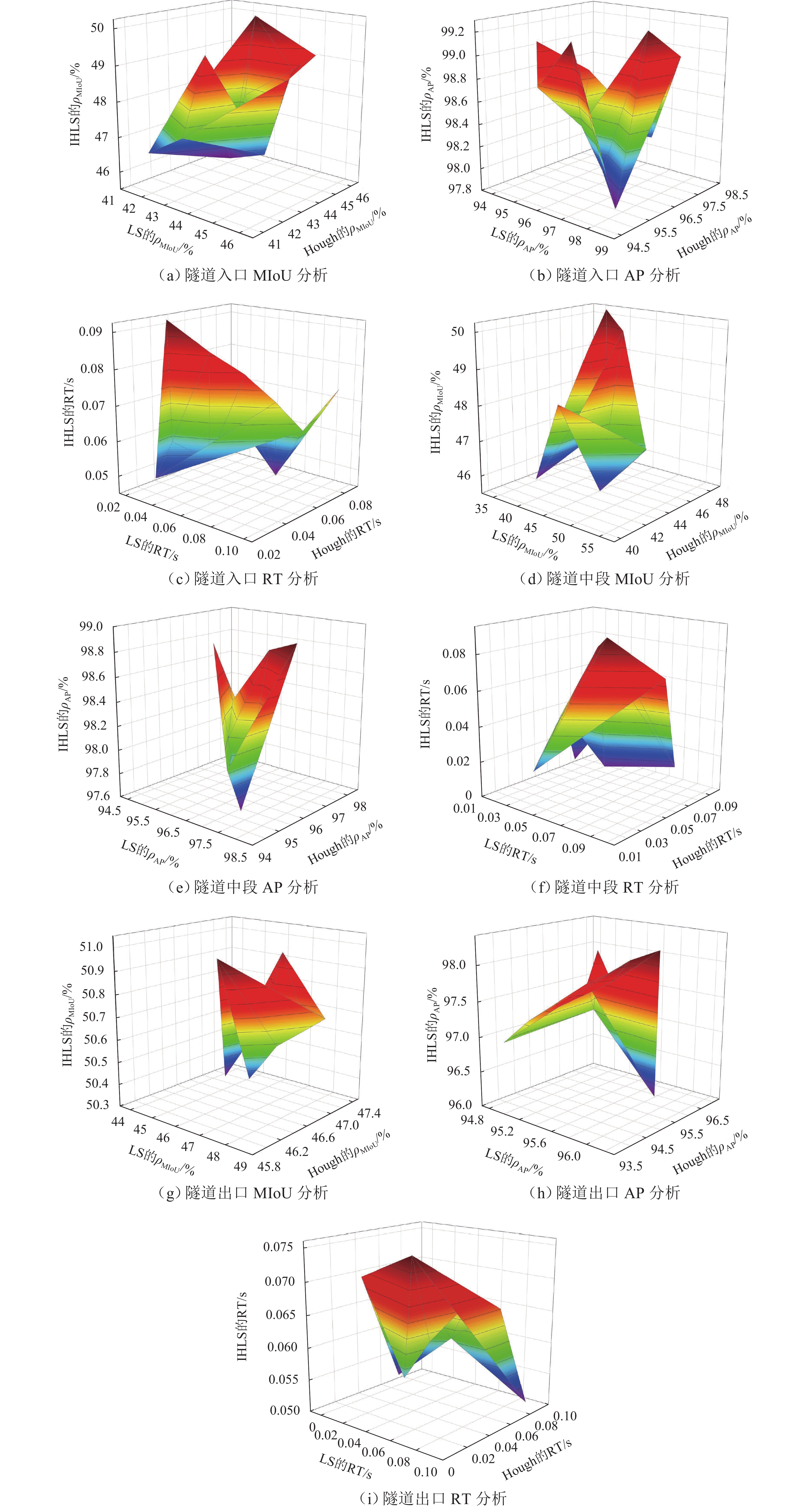
表 4 隧道各段车道线在不同分割模型下的误差结果
Table 4. Error results of lane lines in each section of the tunnel under different segmentation models
% 分割类型 δMIoU MMIoU PMIoU δAP MAP PAP δRT MRT PRT LS1 6.758 45.671 0.041 2.21 4.884 0.0051 0.014 0.000196 0.061 Hough1 6.89 47.472 0.042 2.428 5.895 0.010 0.016 0.000256 0.039 IHLS1 7.107 50.509 0.046 2.894 8.375 0.001 0.02 0.000400 0.030 LS2 5.512 30.382 0.050 2.316 5.364 0.009 0.019 0.000300 0.039 Hough2 5.75 33.063 0.032 2.191 4.8 0.010 0.017 0.000200 0.08 IHLS2 6.958 48.414 0.041 2.384 5.683 0.014 0.021 0.000400 0.081 LS3 7.376 54.405 0.037 2.285 5.221 0.017 0.013 0.000200 0.021 Hough3 7.464 55.711 0.044 2.349 5.518 0.017 0.014 0.000200 0.02 IHLS3 7.864 61.842 0.042 2.526 6.381 0.023 0.019 0.000400 0.016
下载: 导出CSV
-
[1] 金立生, 韩广德, 谢宪毅, 等. 基于强化学习的自动驾驶决策研究综述[J]. 汽车工程, 2023, 45(4): 527-540. doi: 10.19562/j.chinasae.qcgc.2023.04.001JIN Lisheng, HAN Guangde, XIE Xianyi, et al. Review of autonomous driving decision-making research based on reinforcement learning[J]. Automotive Engineering, 2023, 45(4): 527-540. doi: 10.19562/j.chinasae.qcgc.2023.04.001 [2] GONG J L, ZHANG Y F, SUN K, et al. Adaptive lane line detection and warning algorithm based on dynamic constraint[J]. Multimedia Tools and Applications, 2020, 79(39): 28711-28727. [3] ANDRADE D C, BUENO F, FRANCO F R, et al. A novel strategy for road lane detection and tracking based on a vehicle’s forward monocular camera[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 20(4): 1497-1507. doi: 10.1109/TITS.2018.2856361 [4] MARZOUGUI M, ALASIRY A, KORTLI Y, et al. A lane tracking method based on progressive probabilistic Hough transform[J]. IEEE Access, 2020, 8: 84893-84905. doi: 10.1109/ACCESS.2020.2991930 [5] 王其东, 魏振亚, 王乃汉, 等. 基于投影统计与双曲线拟合的车道识别算法[J]. 中国机械工程, 2019, 30(4): 393-399.WANG Qidong, WEI Zhenya, WANG Naihan, et al. Lane detection algorithm based on projection statistics and hyperbolic fitting[J]. China Mechanical Engineering, 2019, 30(4): 393-399. [6] 王畅, 李勇杭, 张凯超, 等. 基于融合分割和变尺度窗口的车道线距离检测[J]. 中国公路学报, 2023, 36(7): 212-222. doi: 10.19721/j.cnki.1001-7372.2023.07.018WANG Chang, LI Yonghang, ZHANG Kaichao, et al. Lane line distance detection based on fusion segmentation and a variable-scale window[J]. China Journal of Highway and Transport, 2023, 36(7): 212-222. doi: 10.19721/j.cnki.1001-7372.2023.07.018 [7] YOUSRI R, ELATTAR M A, DARWEESH M S. A deep learning-based benchmarking framework for lane segmentation in the complex and dynamic road scenes[J]. IEEE Access, 2021, 9: 117565-117580. doi: 10.1109/ACCESS.2021.3106377 [8] AN H, JUNG J I. Decision-making system for lane change using deep reinforcement learning in connected and automated driving[J]. Electronics, 2019, 8(5): 543. doi: 10.3390/electronics8050543 [9] 时小虎, 吴佳琦, 吴春国, 等. 基于残差网络的弯道增强车道线检测方法[J]. 吉林大学学报(工学版), 2023, 53(2): 584-592. doi: 10.13229/j.cnki.jdxbgxb.20210618SHI Xiaohu, WU Jiaqi, WU Chunguo, et al. Residual network based curve enhanced lane detection method[J]. Journal of Jilin University (Engineering and Technology Edition), 2023, 53(2): 584-592. doi: 10.13229/j.cnki.jdxbgxb.20210618 [10] 杜中强, 唐林波, 韩煜祺. 面向嵌入式平台的车道线检测方法[J]. 红外与激光工程, 2022, 51(7): 483-490. doi: 10.3788/IRLA20210753DU Zhongqiang, TANG Linbo, HAN Yuqi. Lane line detection method for embedded platform[J]. Infrared and Laser Engineering, 2022, 51(7): 483-490. doi: 10.3788/IRLA20210753 [11] 蔡英凤, 张田田, 王海, 等. 基于实例分割和自适应透视变换算法的多车道线检测[J]. 东南大学学报(自然科学版), 2020, 50(4): 775-781.CAI Yingfeng, ZHANG Tiantian, WANG Hai, et al. Multi-lane detection based on instance segmentation and adaptive perspective transformation[J]. Journal of Southeast University (Natural Science Edition), 2020, 50(4): 775-781. [12] 徐频捷, 陈逸杰, 李之南, 等. 基于事件驱动的车道线识别算法研究[J]. 电子学报, 2021, 49(7): 1379-1385. doi: 10.12263/DZXB.20201375XU Pinjie, CHEN Yijie, LI Zhinan, et al. Research on event-driven lane recognition algorithms[J]. Acta Electronica Sinica, 2021, 49(7): 1379-1385. doi: 10.12263/DZXB.20201375 [13] 任凤雷, 周海波, 杨璐, 等. 基于双注意力机制的车道线检测[J]. 中国光学(中英文), 2023, 16(3): 645-653. doi: 10.37188/CO.2022-0033REN Fenglei, ZHOU Haibo, YANG Lu, et al. Lane detection based on dual attention mechanism[J]. Chinese Optics, 2023, 16(3): 645-653. doi: 10.37188/CO.2022-0033 [14] 田晟, 张剑锋, 张裕天, 等. 基于扩张卷积金字塔网络的车道线检测算法[J]. 西南交通大学学报, 2020, 55(2): 386-392, 416. doi: 10.3969/j.issn.0258-2724.20181026TIAN Sheng, ZHANG Jianfeng, ZHANG Yutian, et al. Lane detection algorithm based on dilated convolution pyramid network[J]. Journal of Southwest Jiaotong University, 2020, 55(2): 386-392, 416. doi: 10.3969/j.issn.0258-2724.20181026 [15] 郑磊. 基于深度学习的驾驶行为识别与预警系统的设计与实现[D]. 重庆: 西南大学, 2021. [16] LI C Y, GUO C L, LOY C C. Learning to enhance low-light image via zero-reference deep curve estimation[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2022, 44(8): 4225-4238. [17] 陈文龙, 王汉封, 董雨珊. 基于Canny算法的双圆柱涡振干扰效应试验研究[J]. 中南大学学报(自然科学版), 2023, 54(7): 2799-2810.CHEN Wenlong, WANG Hanfeng, DONG Yushan. Experimental research on vortex-induced vibration interference effect of two circular cylinders based on Canny algorithm[J]. Journal of Central South University (Science and Technology), 2023, 54(7): 2799-2810. [18] 成佳明, 靳慧, 郑子健, 等. 基于机器视觉的施工现场钢结构焊缝坡口识别[J]. 东南大学学报(自然科学版), 2023, 53(1): 86-93. doi: 10.3969/j.issn.1001-0505.2023.01.011CHENG Jiaming, JIN Hui, ZHENG Zijian, et al. Welding seam groove recognition of steel structure on construction site based on machine vision[J]. Journal of Southeast University (Natural Science Edition), 2023, 53(1): 86-93. doi: 10.3969/j.issn.1001-0505.2023.01.011 [19] 曹宇, 徐传鹏. 一种改进阈值分割算法在镜片缺陷检测中的应用[J]. 激光与光电子学进展, 2021, 58(16): 219-224. doi: 10.3788/LOP202158.1610007CAO Yu, XU Chuanpeng. Application of an improved threshold segmentation algorithm in lens defect detection[J]. Laser & Optoelectronics Progress, 2021, 58(16): 219-224. doi: 10.3788/LOP202158.1610007 [20] 熊璋玺, 刘明亮, 郭擎, 等. 非下采样剪切波变换域下遥感图像融合[J]. 哈尔滨工程大学学报, 2022, 43(2): 290-297. doi: 10.11990/jheu.202012011XIONG Zhangxi, LIU Mingliang, GUO Qing, et al. Remote sensing image fusion in the non-subsampled shearlet transform domain[J]. Journal of Harbin Engineering University, 2022, 43(2): 290-297. doi: 10.11990/jheu.202012011 [21] 王会峰, 张佳佳, 赵祥模, 等. 成像偏振在车道线检测与识别中的应用[J]. 西南交通大学学报, 2019, 54(2): 415-420. doi: 10.3969/j.issn.0258-2724.20160412WANG Huifeng, ZHANG Jiajia, ZHAO Xiangmo, et al. Lane line detection and recognition by polarisation imaging[J]. Journal of Southwest Jiaotong University, 2019, 54(2): 415-420. doi: 10.3969/j.issn.0258-2724.20160412 [22] 化春键, 潘瑞, 陈莹. 一种基于边缘方向连续性的车道线快速检测算法[J]. 传感技术学报, 2021, 34(8): 1082-1088.HUA Chunjian, PAN Rui, CHEN Ying. A fast lane line detection algorithm based on the continuity of edge direction[J]. Chinese Journal of Sensors and Actuators, 2021, 34(8): 1082-1088. [23] 汪鹏飞, 沈庆宏, 张维利, 等. 基于多尺度特征图像分割的车道线提取方法[J]. 南京大学学报(自然科学), 2022, 58(2): 336-344. doi: 10.13232/j.cnki.jnju.2022.02.017WANG Pengfei, SHEN Qinghong, ZHANG Weili, et al. Lane extraction method based on multi-scale feature image segmentation[J]. Journal of Nanjing University (Natural Science), 2022, 58(2): 336-344. doi: 10.13232/j.cnki.jnju.2022.02.017 [24] 石金鹏, 张旭. 基于空间语义分割的多车道线检测跟踪网络[J]. 光学 精密工程, 2023, 31(9): 1357-1365. doi: 10.37188/OPE.20233109.1357SHI Jinpeng, ZHANG Xu. Multi-lane line detection and tracking network based on spatial semantics segmentation[J]. Optics and Precision Engineering, 2023, 31(9): 1357-1365. doi: 10.37188/OPE.20233109.1357 [25] 武志斐, 李守彪. 基于实例分割的车道线检测算法[J]. 汽车工程, 2023, 45(2): 263-272.WU Zhifei, LI Shoubiao. Lane detection algorithm based on instance segmentation[J]. Automotive Engineering, 2023, 45(2): 263-272. -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 216
- HTML全文浏览量: 115
- PDF下载量: 33
- 被引次数: 0