

Rapid Assessment of Landslides Induced by Jishishan Ms6.2 Earthquake in Gansu Province
-
摘要:
震后迅速获取同震滑坡分布及灾情评估对于应急救援和重建工作至关重要,采用IDNPM (InSAR data-newmark physical fusion driver model)方法对2023年12月18日甘肃积石山地震引发的滑坡进行快速评估,以期迅速精准掌握滑坡灾害的宏观分布. 首先,通过时序星基增强系统(SBAS)-InSAR揭示该地区有着严重的冲沟发育和溯源侵蚀现象,这些地质特征为滑坡提供了有利的孕育环境;然后,运用IDNPM方法对积石山地震进行滑坡快速评估,预测出赵木川村、塔沙坡村、大河家镇等地的陡峭斜坡及沟壑两侧为地震诱发滑坡的高风险区域;最后,综合实地考察、数值模拟及卫星识别技术,验证该模型在实际应用中的可靠性. 结果表明:全区共有2.657%的高风险区,需要重点关注此类区域;对已发生崩滑的坡体紧急清理和加固,对于未发生滑移的区域,应采取监测和评估措施,以防范可能发生的震后次生滑坡事件;研究成果可为受灾区的灾后应急救援和恢复重建工作提供有力的数据支撑.
Abstract:Rapidly obtaining co-seismic landslide distribution and conducting disaster assessments after earthquakes are vital for effective emergency relief and reconstruction. Therefore, in this study, the InSAR data-Newmark physical fusion driver model (IDNPM) was used to rapidly assess the landslides triggered by the earthquake in Jishishan, Gansu Province on December 18, 2023, with a view to quickly and accurately grasping the macroscopic distribution of landslide hazards. Firstly, through the time series satellite-based augmentation system (SBAS)-InSAR, it was revealed that there was serious gully development and retrogressive erosion in this area. These geological characteristics provided a favorable breeding environment for landslides. Secondly, the IDNPM was used to quickly evaluate the landslide of Jishishan earthquake, and it was predicted that the steep slopes and gully sides of Zhaomuchuan Village, Tashapo Village, and Dahejia Town were the high-risk areas for earthquake-induced landslide. Finally, based on the field investigation, numerical simulation, and satellite identification technology, the reliability of the model in practical application was proven. The results indicate that a total of 2.657% of the region is at high risk. There is a need to focus on such zones by urgently clearing and stabilizing slopes where landslides have occurred. For areas where no landslides have occurred, monitoring and assessment measures should be taken to guard against possible post-earthquake secondary landslide events. The research results can provide strong data support for emergency relief and reconstruction work after earthquakes in the affected areas.
-
Key words:
- earthquake /
- landslide /
- emergency assessment /
- prediction model /
- InSAR technology
-
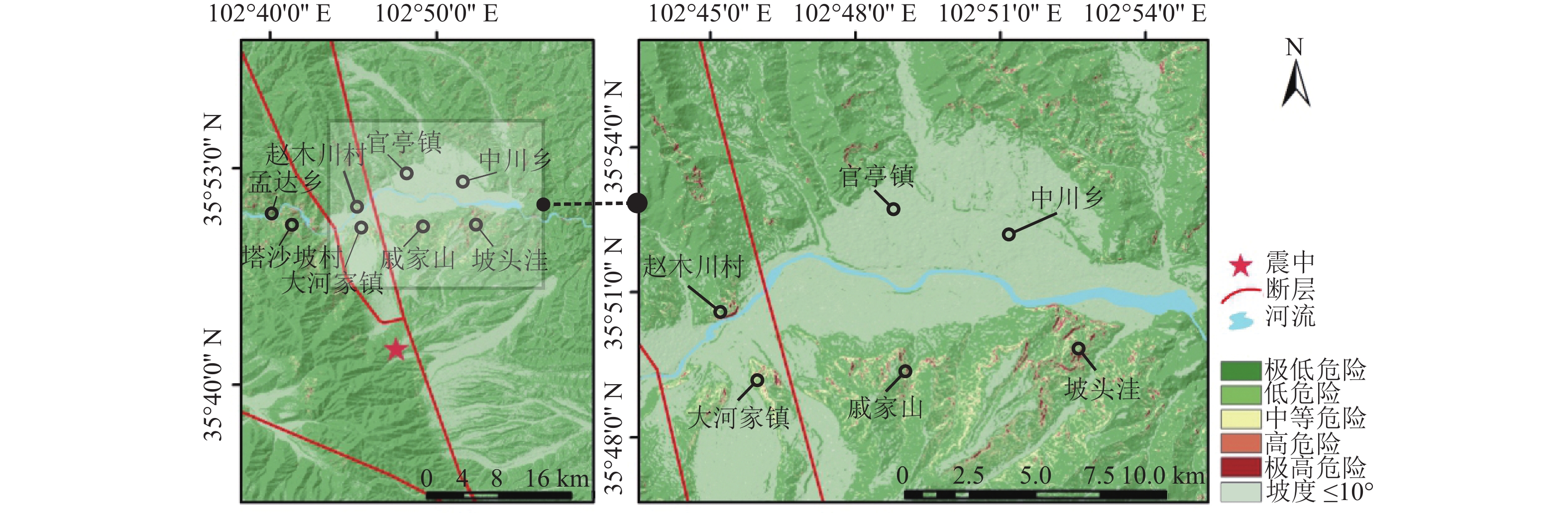
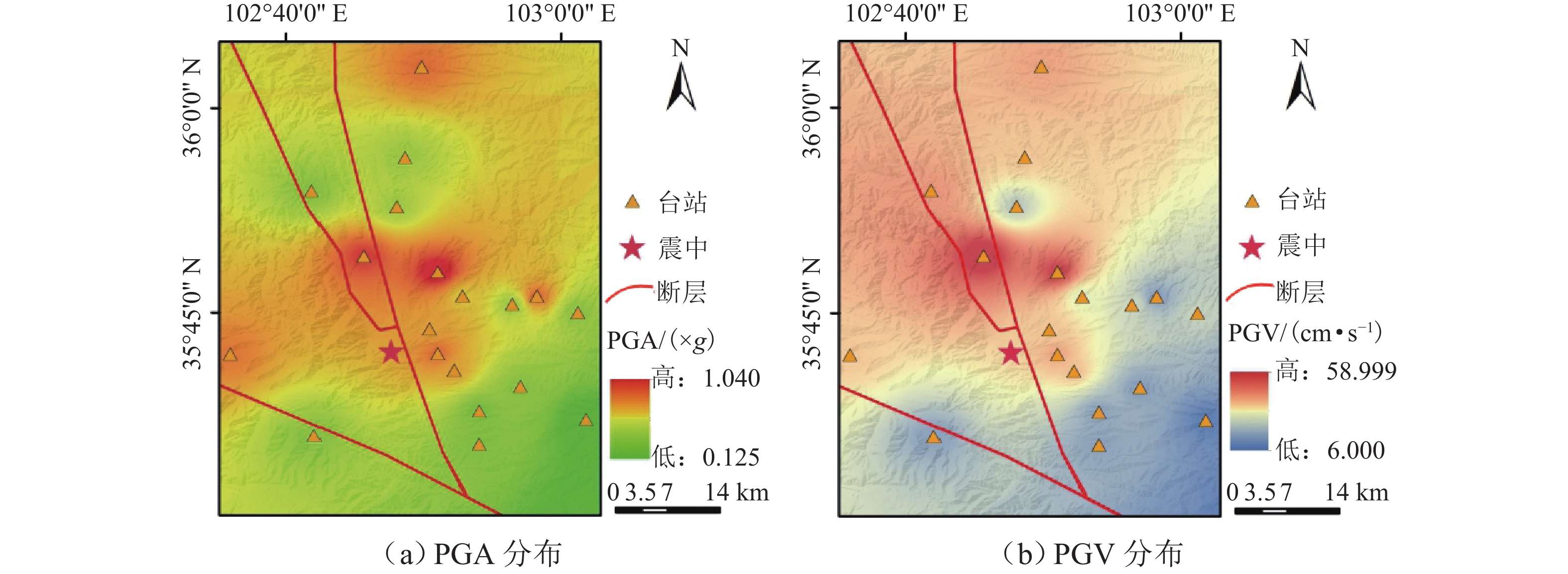
图 5 Newmark累计位移结果及其滑坡危险性分布
Figure 5. Newmark cumulative displacement and landslide hazard zonation
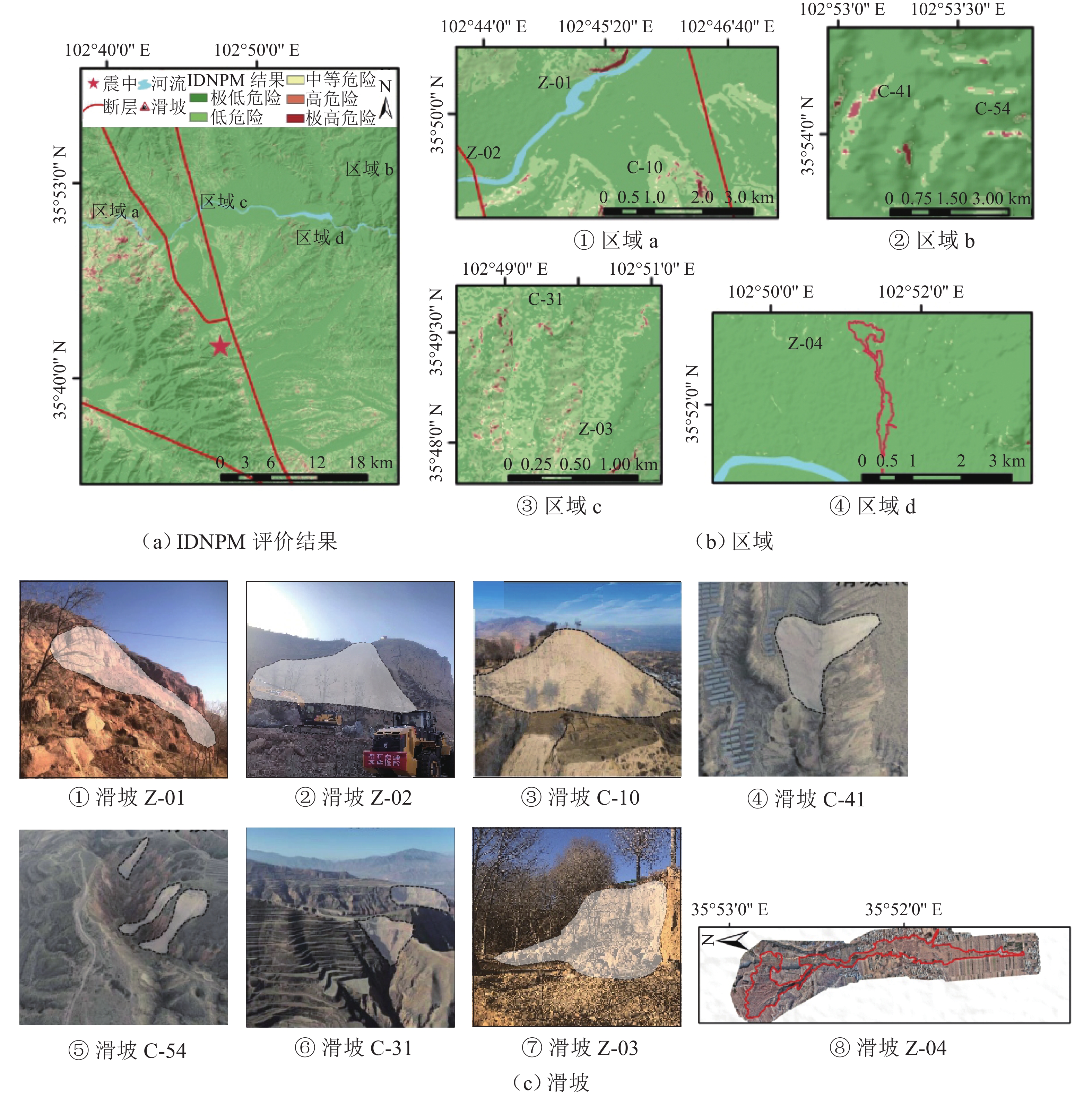
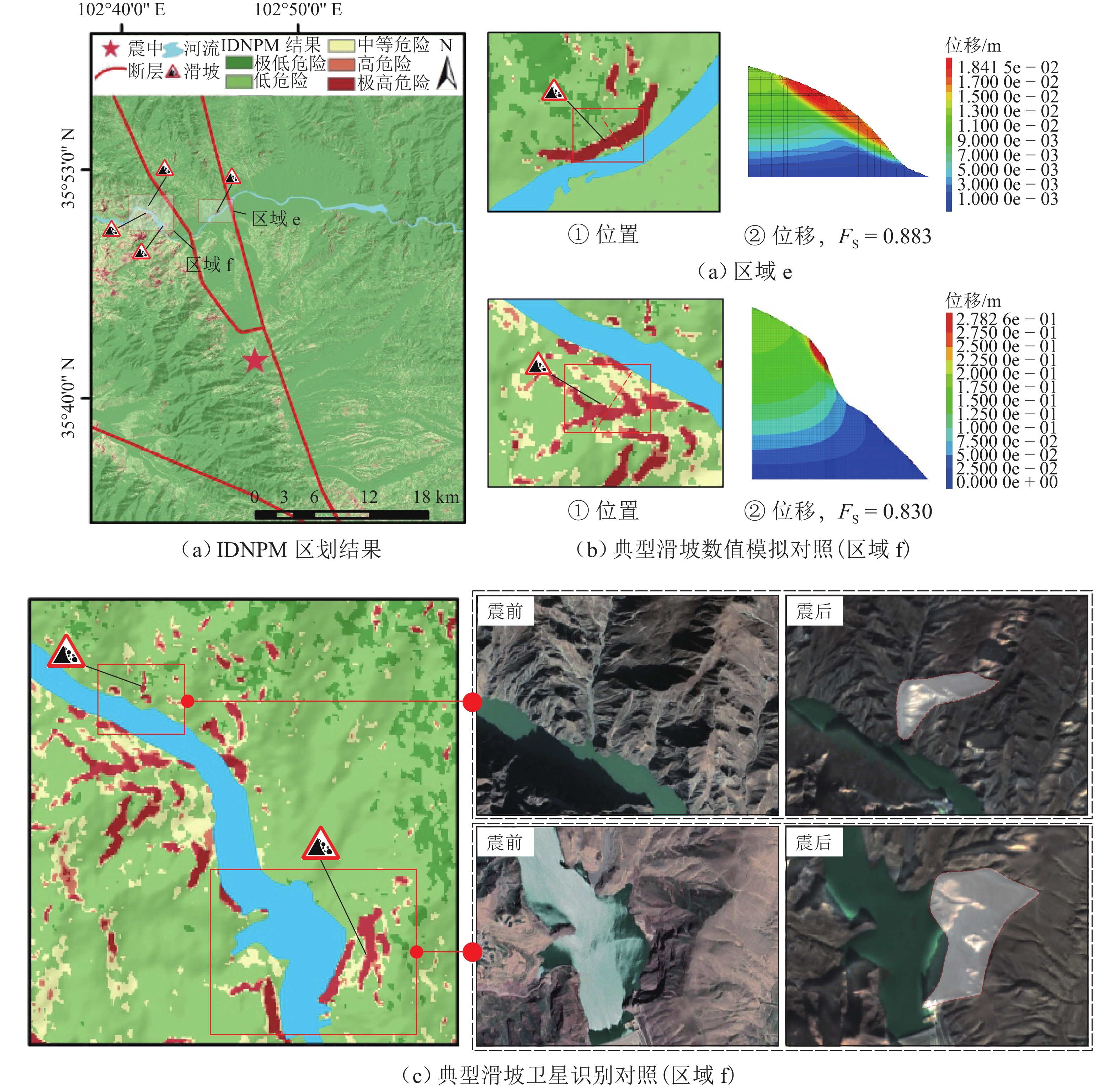
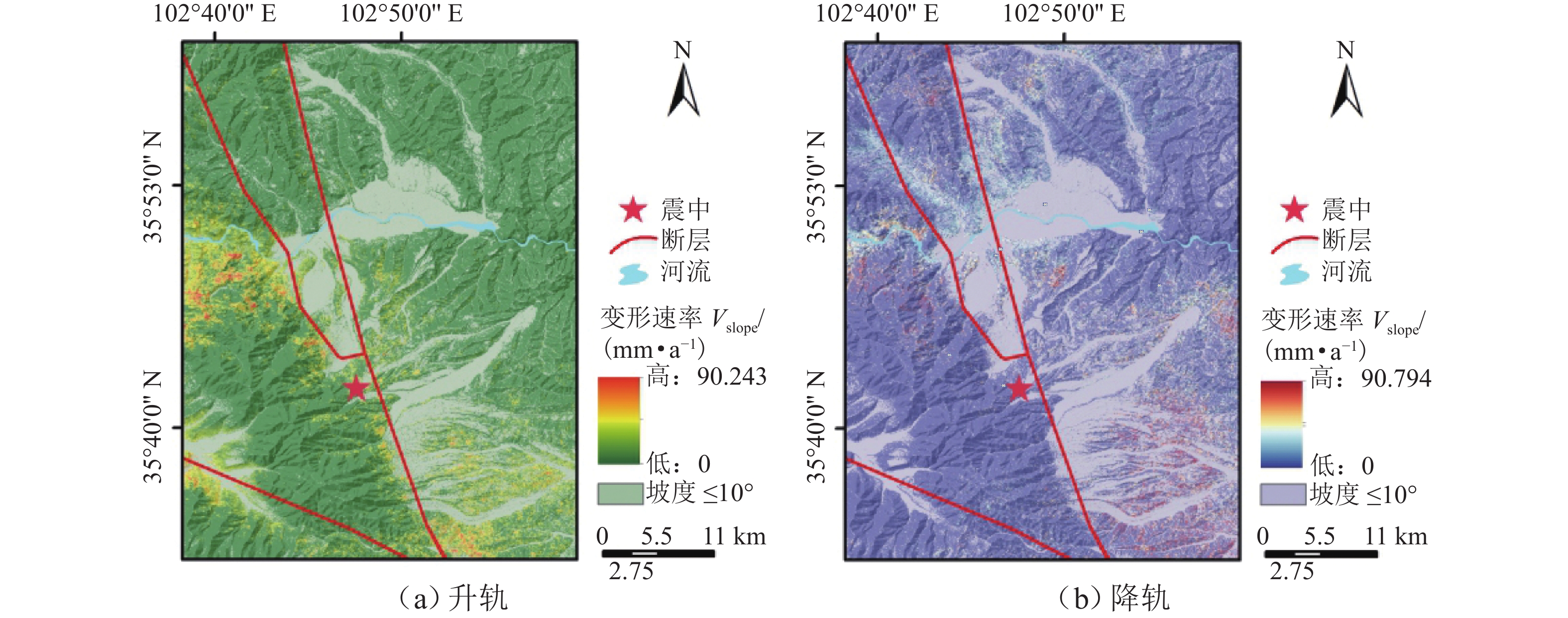
图 8 IDNPM滑坡危险性评估结果与数值模拟、卫星识别对照
Figure 8. Comparison of landslide risk assessment results of IDNPM with numerical simulations and satellite identification
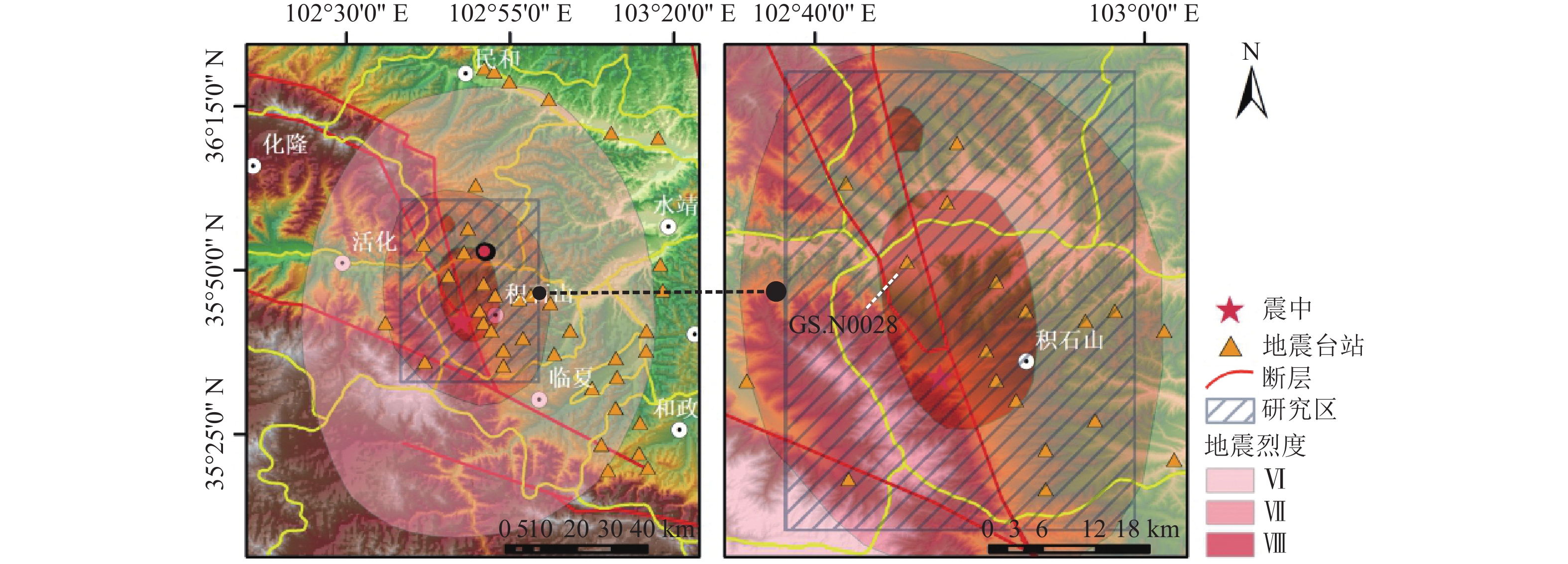
表 1 数据及来源
Table 1. Data and sources
数据名 数据格式 时间 数据源 Sentinel-
1A5 m × 20 m 2022—
2023 年阿拉斯加卫星设备 https://search.asf.alaska.edu 精密定轨 2022—
2023 年欧洲航天局 https://scihub.copernicus.eu DEM① 12.5 m 2009 年 阿拉斯加卫星设备 https://search.asf.alaska.edu DEM② 30 m 2021 年 日本宇宙航空研究开发机构 https://global.jaxa.jp 地层岩性 1∶ 500000 2013 年 国家地质资料库 http://www.ngac.org.cn 卫星影像 10 m 2023 年 欧洲航天局 https://scihub.copernicus.eu  下载: 导出CSV
下载: 导出CSV
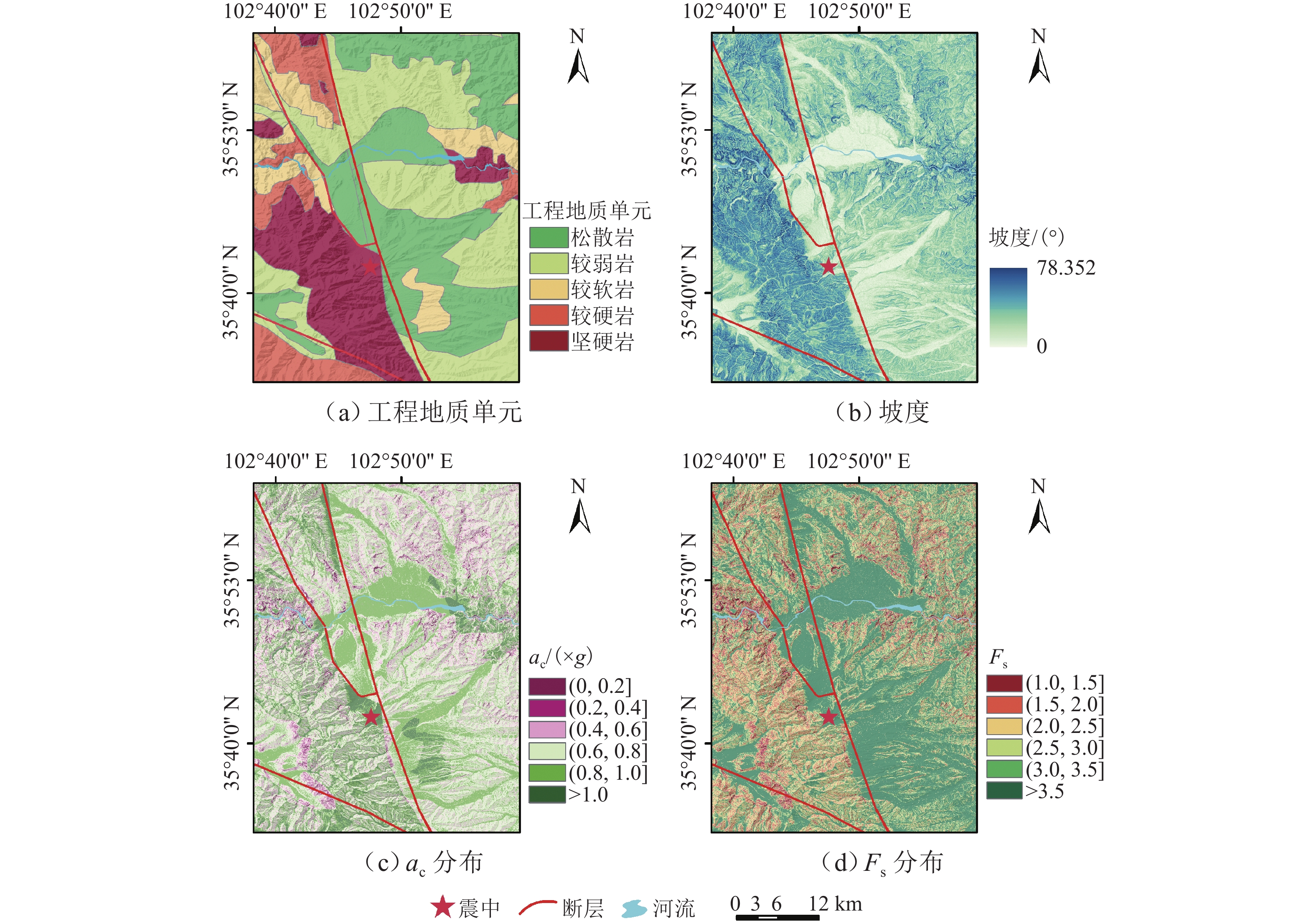
表 2 研究区岩性力学参数及取值
Table 2. Mechanical parameters and values of lithology in study area
序号 工程地质单元 c/kPa $ \varphi $/(°) $ \gamma $/(kN·m−3) 1 坚硬岩 38 40.0 24.5 2 较硬岩 35 35.0 23.0 3 较软岩 30 24.5 17.8 4 较弱岩 25 22.2 17.5 5 松散岩 22 21.0 15.4
下载: 导出CSV
-
[1] BOMMER J J, RODRı́GUEZ C E. Earthquake-induced landslides in central America[J]. Engineering Geology, 2002, 63(3/4): 189-220. [2] JIBSON R W. Regression models for estimating coseismic landslide displacement[J]. Engineering Geology, 2007, 91(2/3/4): 209-218. [3] KORONOVSKII N V, ZAKHAROV V S, NAIMARK A A. The unpredictability of strong earthquakes: new understanding and solution of the problem[J]. Moscow University Geology Bulletin, 2021, 76(4): 366-373. doi: 10.3103/S0145875221040074 [4] 许冲, 田颖颖, 马思远, 等. 1920年海原8.5级地震高烈度区滑坡编录与分布规律[J]. 工程地质学报, 2018, 26(5): 1188-1195.XU Chong, TIAN Yingying, MA Siyuan, et al. Inventory and spatial distribution of landslides in IX-XI high intensity areas of 1920 Haiyuan (China) M8.5 earthquake[J]. Journal of Engineering Geology, 2018, 26(5): 1188-1195. [5] XU C, XU X W, YAO X, et al. Three (nearly) complete inventories of landslides triggered by the May 12, 2008 Wenchuan Mw 7.9 earthquake of China and their spatial distribution statistical analysis[J]. Landslides, 2014, 11(3): 441-461. doi: 10.1007/s10346-013-0404-6 [6] 殷跃平. 汶川八级地震地质灾害研究[J]. 工程地质学报, 2008, 16(4): 433-444. doi: 10.3969/j.issn.1004-9665.2008.04.001YIN Yueping. Researches on the geo-hazards triggered by Wenchuan earthquake, Sichuan[J]. Journal of Engineering Geology, 2008, 16(4): 433-444. doi: 10.3969/j.issn.1004-9665.2008.04.001 [7] LAN H X, LI L P, ZHANG Y S, et al. Risk assessment of debris flow in Yushu seismic area in China: a perspective for the reconstruction[J]. Natural Hazards and Earth System Sciences, 2013, 13(11): 2957-2968. doi: 10.5194/nhess-13-2957-2013 [8] CHEN X L, YU L, WANG M M, et al. Brief communication: landslides triggered by the Ms = 7.0 Lushan earthquake, China[J]. Natural Hazards and Earth System Sciences, 2014, 14(5): 1257-1267. doi: 10.5194/nhess-14-1257-2014 [9] FAN X M, FANG C Y, DAI L X, et al. Near real time prediction of spatial distribution probability of earthquake-induced landslides-take the Lushan Earthquake on June 1, 2022 as an example[J]. Journal of Engineering Geology, 2022, 30(3): 729-739. [10] 甘肃省积石山县志编辑部. 积石山县保安族东乡族撒拉族自治县志 [M]. 北京: 红旗出版社, 2019: 82. [11] 陈博, 宋闯, 陈毅, 等. 2023年甘肃积石山Ms 6.2地震同震滑坡和建筑物损毁情况应急识别与影响因素研究[J/OL]. 武汉大学学报(信息科学版), (2024-01-02)[2024-01-08], https://doi.org/10.13203/J.whugis20230497. [12] ZHUO Y Q, LIU P X, GUO Y S, et al. Cross-effects of loading rate and cumulative fault slip on pre-seismic rupture and unstable slip rate of laboratory earthquakes[J]. Tectonophysics, 2022, 826: 229266.1-229266.13. [13] ZENG Y, ZHANG Y B, LIU J, et al. Rapid emergency response assessment of earthquake-induced landslides driven by fusion of InSAR deformation data and newmark physical models[J]. Remote Sensing, 2023, 15(18): 4605.1-4605.21. [14] ZENG Y, ZHANG Y B, LIU J, et al. Assessment of earthquake-induced landslide hazard zoning using the physics-environmental coupled model[J]. Journal of Mountain Science, 2023, 20(9): 2644-2664. doi: 10.1007/s11629-023-7947-3 [15] ZHANG Y B, LI X Q, FU J W, et al. Quick analysis model for earthquake-induced landslide movement based on energy conservation[J]. Landslides, 2024, 21(6): 1315-1331. doi: 10.1007/s10346-024-02223-x [16] 王卫民, 何建坤, 丁林, 等. 甘肃临夏Ms6.2级地震震源破裂过程反演初步结果[EB/OL]. (2023-12-19) [2024-01-08]. https://mp.weixin.qq.com/s/SuKbTgq8-0EV2FbNcdlYqQ. [17] 王勤彩, 罗钧, 陈翰林, 等. 2023年12月18日甘肃积石山6.2级地震震源机制解[J]. 地震, 2024, 1(1): 185-188.WANG Qincai, LUO Jun, CHEN Hanlin, et al. Focal mechanism for the December 18, 2023, Jishishan Ms6.2 earthquake in Gansu Province[J]. Earthquake, 2024, 1(1): 185-188. [18] 袁道阳, 张培震, 雷中生, 等. 青海拉脊山断裂带新活动特征的初步研究[J]. 中国地震, 2005, 21(1): 93-102.YUAN Daoyang, ZHANG Peizhen, LEI Zhongsheng, et al. A preliminary study on the new activity features of the lajishan mountain fault zone in Qinghai Province[J]. Earthquake Research in China, 2005, 21(1): 93-102. [19] 张克信, 何卫红, 徐亚东, 等. 论从俯冲增生杂岩带重建洋板块地层主要类型与序列: 以青藏特提斯二叠系为例[J]. 沉积与特提斯地质, 2021, 41(2): 137-151.ZHANG Kexin, HE Weihong, XU Yadong, et al. , Reconstruction of main types for oceanic plate strata in the subduction accretionary complex and feature of sequence for each type: an example from the Qinghai—Tibet Tethyan Permian strata[J]. Sedimentary Geology and Tethyan Geology, 2021, 41(2): 137-151. [20] 王运生, 赵波, 吉锋, 等. 2023年甘肃积石山Ms6.2级地震震害异常的启示[J]. 成都理工大学学报(自然科学版), 2024, 51(1): 1-8.WANG Yunsheng, ZHAO Bo, JI Feng, et al. Preliminary insights into the hazards triggered by the 2023 Jishishan Ms 6.2 earthquake in Gansu Province[J]. Journal of Chengdu University of Technology (Science & Technology Edition), 2024, 51(1): 1-8. [21] DREYFUS D, RATHJE E M, JIBSON R W. The influence of different simplified sliding-block models and input parameters on regional predictions of seismic landslides triggered by the Northridge earthquake[J]. Engineering Geology, 2013, 163: 41-54. doi: 10.1016/j.enggeo.2013.05.015 [22] 李雪婧, 高孟潭, 徐伟进. 基于Newmark模型的概率地震滑坡危险性分析方法研究——以甘肃天水地区为例[J]. 地震学报, 2019, 41(6): 795-807.LI Xuejing, GAO Mengtan, XU Weijin. Probabilistic seismic slope displacement hazard analysis based on Newmark displacement model: Take the area of Tianshui, Gansu Province, China as an example[J]. Acta Seismologica Sinica, 2019, 41(6): 795-807. [23] 程小杰, 杨为民, 向灵芝, 等. 基于Newmark模型的天水市北山地震黄土滑坡危险性评价[J]. 地质力学学报, 2017, 23(2): 296-305.CHENG Xiaojie, YANG Weimin, XIANG Lingzhi, et al. Risk assessment of seismic loess landslide based on newmark model in Beishan, Tianshui city[J]. Journal of Geomechanics, 2017, 23(2): 296-305. [24] ZHANG Y B, LIU J, CHENG Q G, et al. A new permanent displacement model considering pulse-like ground motions and its application in landslide hazard assessment[J]. Soil Dynamics and Earthquake Engineering, 2022, 163: 107556.1-107556.27. [25] LIU J, ZHANG Y B, WEI J T, et al. Hazard assessment of earthquake-induced landslides by using permanent displacement model considering near-fault pulse-like ground motions[J]. Bulletin of Engineering Geology and the Environment, 2021, 80(11): 8503-8518. doi: 10.1007/s10064-021-02464-3 [26] SAMSONOV S V, TRISHCHENKO A P, TIAMPO K, et al. Removal of systematic seasonal atmospheric signal from interferometric synthetic aperture radar ground deformation time series[J]. Geophysical Research Letters, 2014, 41(17): 6123-6130. doi: 10.1002/2014GL061307 [27] CHANG M, SUN W J, XU H Z, et al. Identification and deformation analysis of potential landslides after the Jiuzhaigou earthquake by SBAS-InSAR[J]. Environmental Science and Pollution Research, 2023, 30(13): 39093-39106. doi: 10.1007/s11356-022-25055-5 [28] DAI C, LI W L, LU H Y, et al. Landslide hazard assessment method considering the deformation factor: a case study of Zhouqu, Gansu Province, Northwest China[J]. Remote Sensing, 2023, 15(3): 596.1-596.24. -

 下载:
下载:

 点击查看大图
点击查看大图

计量
- 文章访问数: 417
- HTML全文浏览量: 200
- PDF下载量: 60
- 被引次数: 0