

Large Deformation Control of Tunnel Surrounding Rock Based on Advance Stress Release and Grouting Reinforcement
-
摘要:
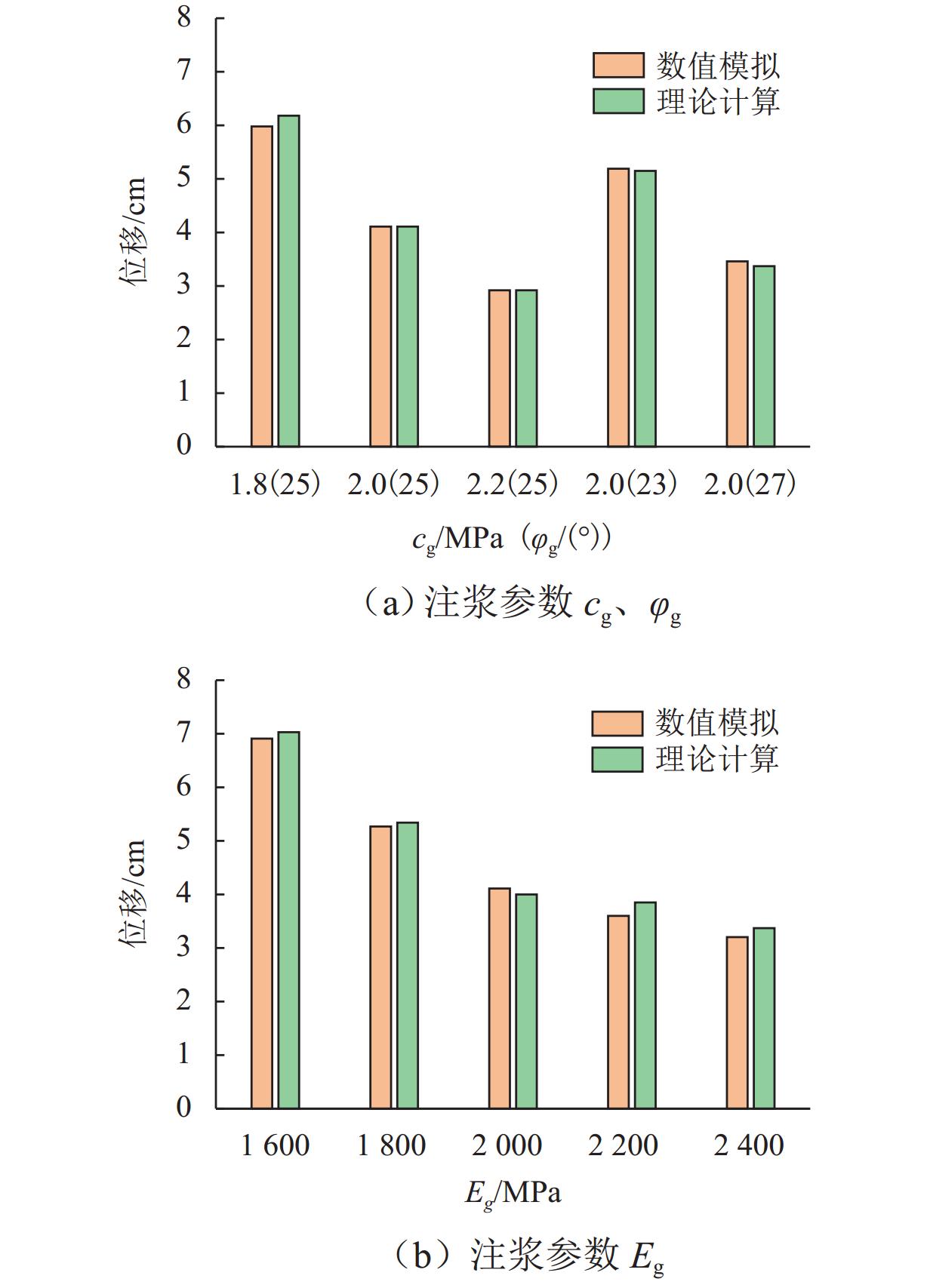
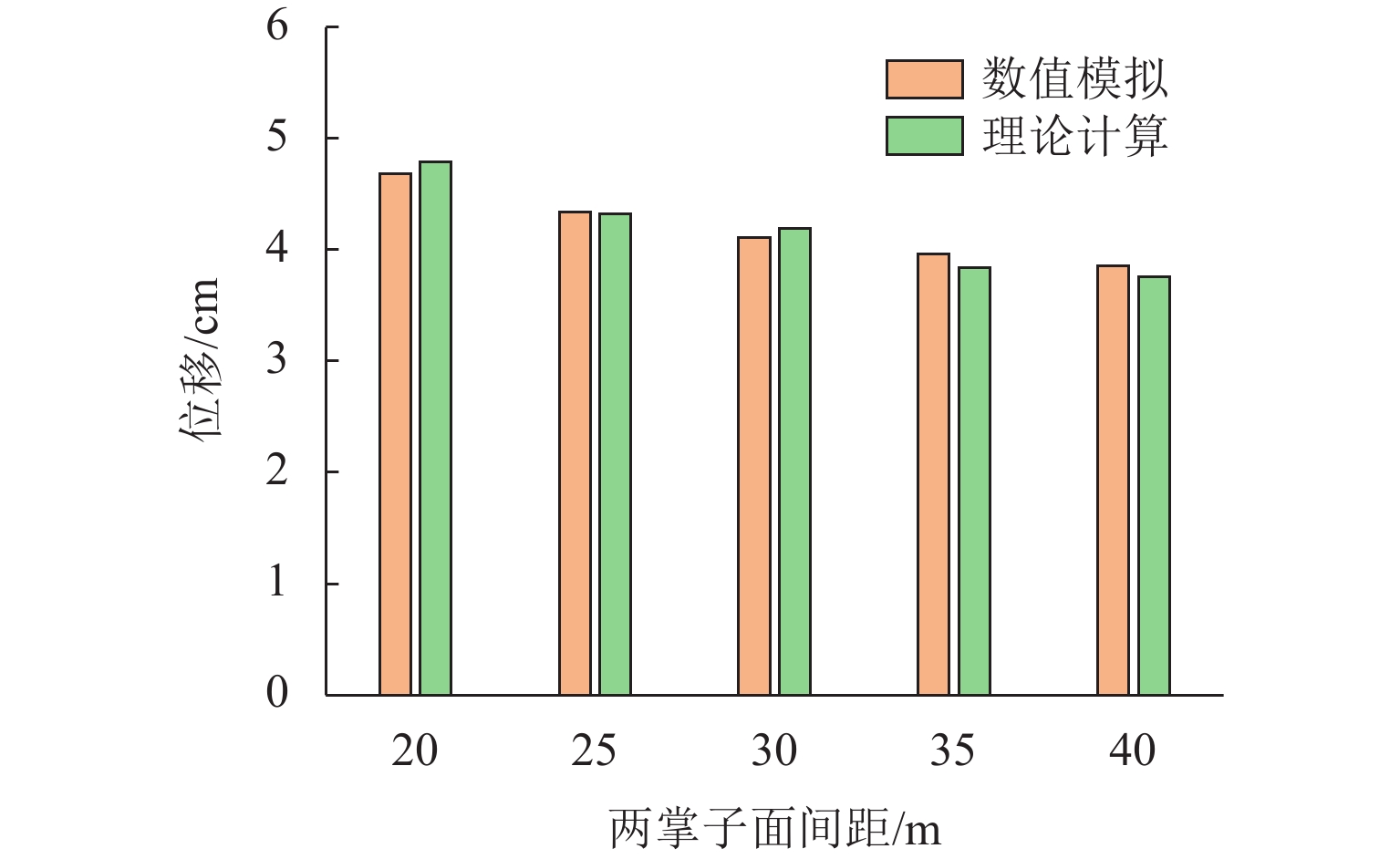
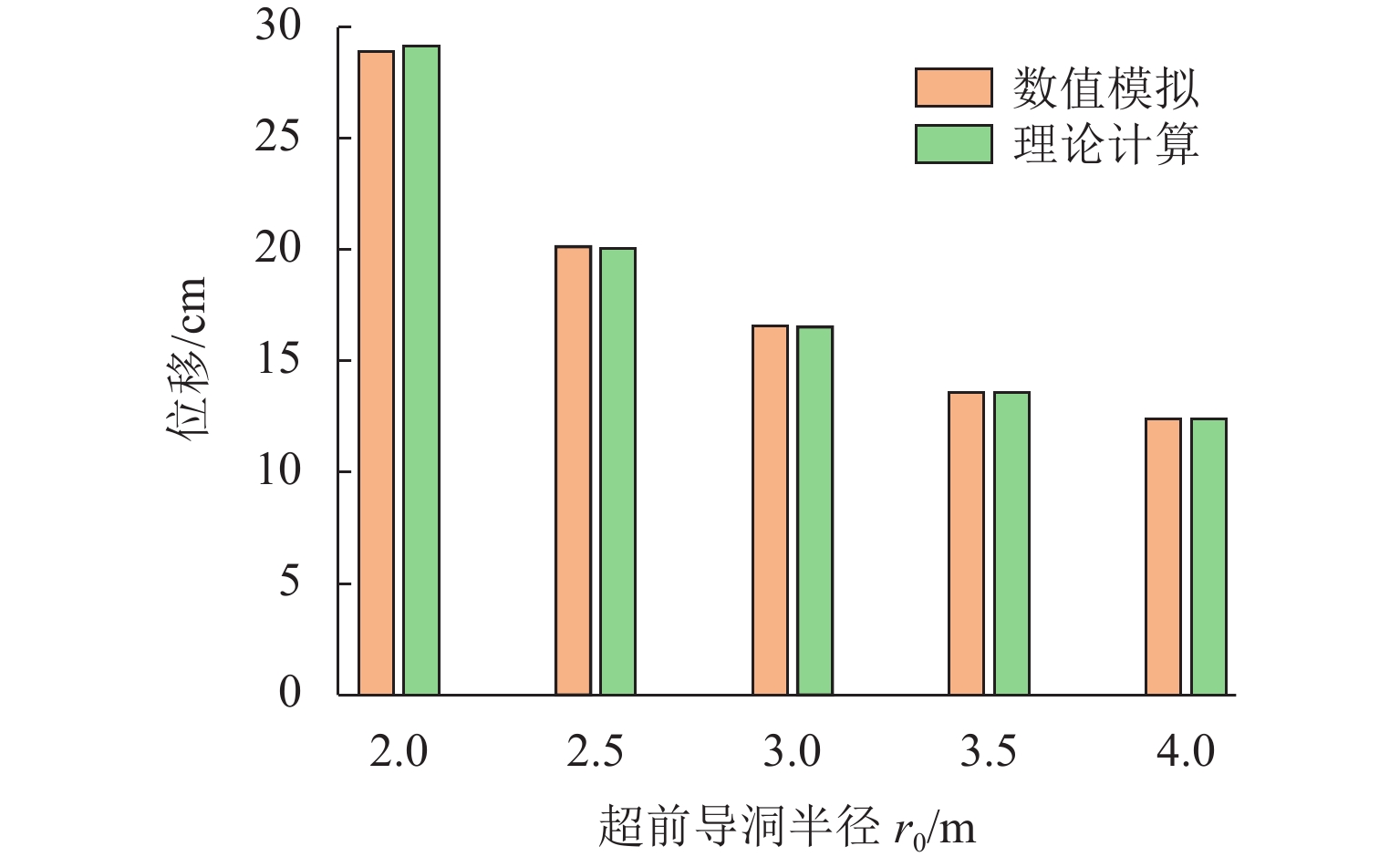
为克服超前导洞用于软岩隧道围岩大变形控制时存在的局限性,深入分析软岩大变形特征及其存在的问题,提出基于“超前应力释放 + 环向(滞后)注浆 + 加长锚杆”的变形控制方式. 首先,借助软岩峰后刚度与强度统一劣化模型与统一强度准则得到超前导洞及正洞围岩的弹塑性解;然后,利用FLAC3D有限差分软件实现软岩峰后刚度与强度统一劣化模型的本构开发,得到超前导洞及正洞围岩的变形及应力分布;最后,对软化模量、注浆参数、超前导洞半径和两掌子面间距等影响因素进行分析. 研究结果表明:超前导洞可以有效释放围岩挤压变形,岩体松动破碎是造成释放层及正洞围岩变形过大、稳定性下降的主要原因,环形(滞后)注浆可以有效控制扩挖过程中的围岩松动变形,并改善围岩应力分布,提高围岩承载能力;软化模量取值越大时超前导洞围岩变形越大,注浆参数取值越大时正洞围岩变形越小,增大超前导洞开挖半径、增加两掌子面间距(超前导洞及正洞)均可使初始地应力释放更加充分.
Abstract:To address the limitations of using an advance guide tunnel for controlling large deformations of surrounding rock in soft rock tunnels, a deformation control method of “advance stress release + circumferential (lagging) grouting + lengthened anchor rod” was proposed after a thorough analysis of the large deformation characteristics of soft rocks and associated problems. Based on a unified model for the degradation of post-peak stiffness and strength of soft rocks and a unified strength criterion, the elastic-plastic solutions for the advance guide tunnel and main tunnel surrounding rock were obtained. Then, the constitutive model for the degradation of post-peak stiffness and strength of soft rocks was developed in FLAC3D finite difference software, and the deformation and stress distribution of the advance guide tunnel and main tunnel surrounding rock were obtained. Finally, the influencing factors such as softening modulus, grouting parameters, radius of advance guide tunnel, and distance between two tunnel faces were analyzed. The research results indicate that the advance guide tunnel can effectively release the surrounding rock deformations induced by compression, and the loosening and fracturing of the rock mass are the main reasons for excessive deformations and stability decrease of the release layer and main tunnel surrounding rock. Circumferential (lagging) grouting can effectively control the loosening deformations of the surrounding rock during excavation, improve the stress distribution of the surrounding rock, and enhance the load-bearing capacity of the surrounding rock. Larger values of the softening moduli indicate strong surrounding rock deformations of the advance guide tunnel. Larger values of grouting parameters indicate deformations of the main tunnel surrounding rock. Increasing the excavation radius of the advance guide tunnel and increasing the distance between the two tunnel faces (advance guide tunnel and main tunnel) can make the initial ground stress release more sufficient.
-
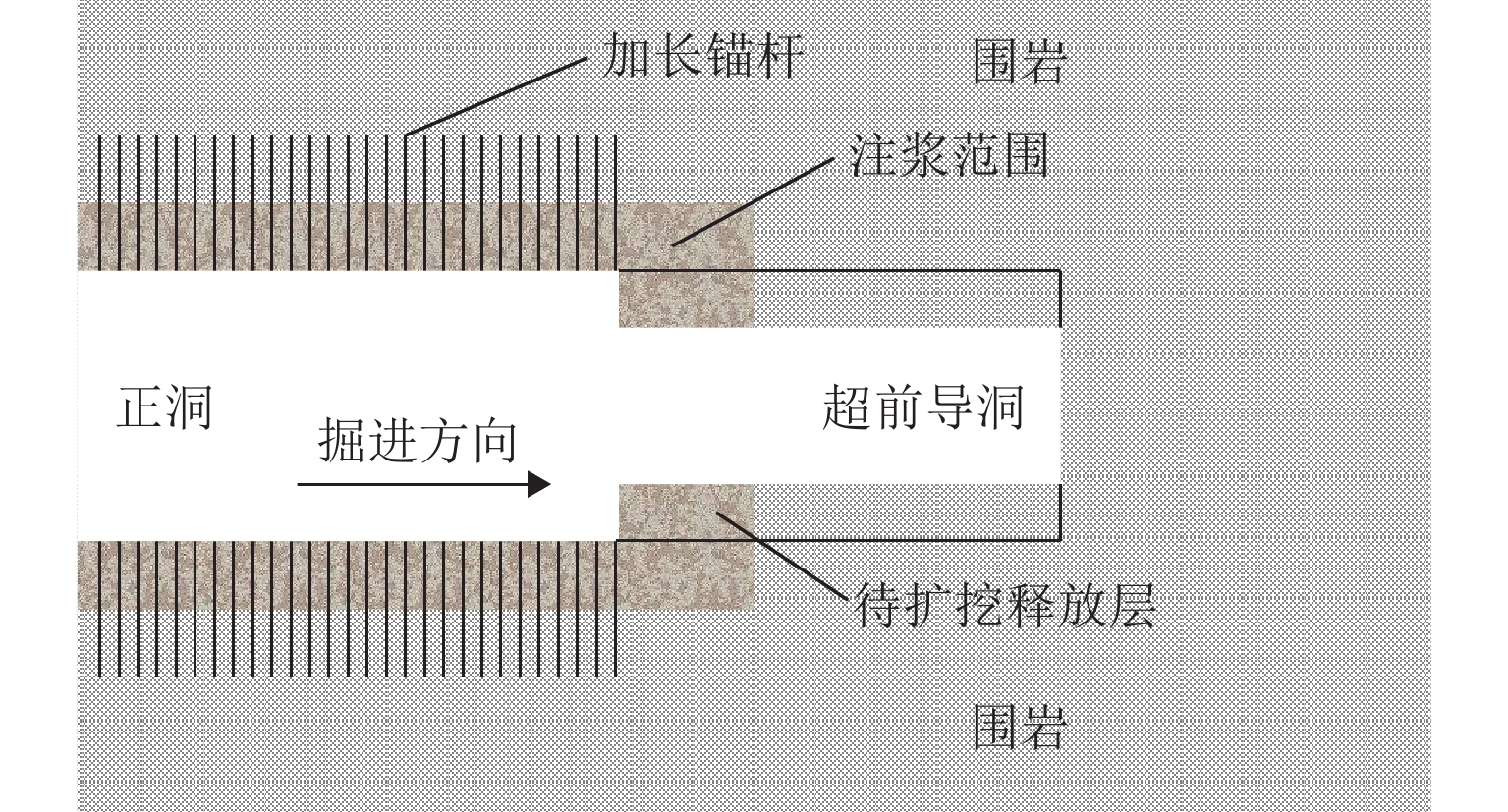
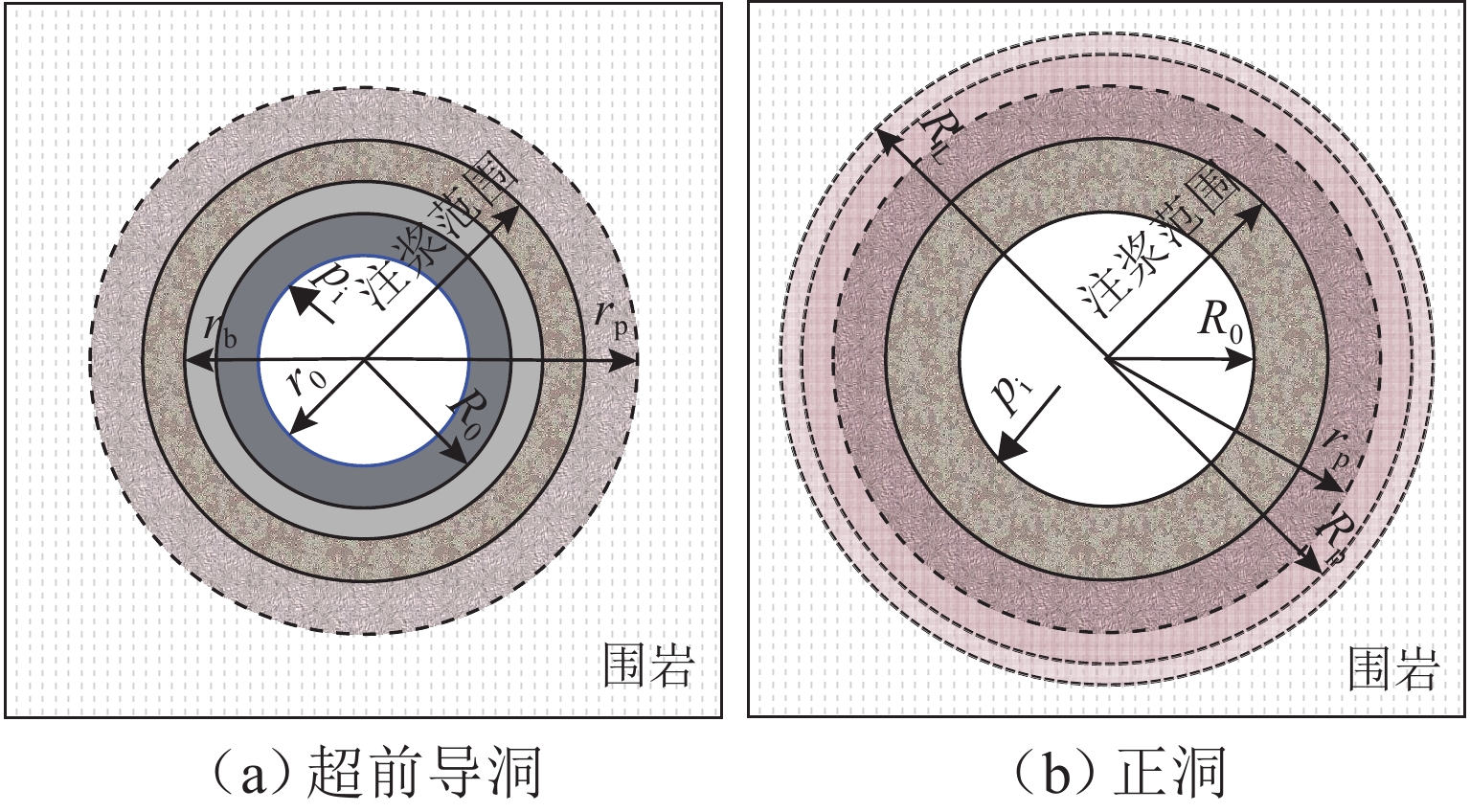
图 1 “超前导洞 + 环向注浆 + 加长锚杆”支护示意
Figure 1. Support of “advance guide tunnel + circumferential grouting + lengthened anchor rod”
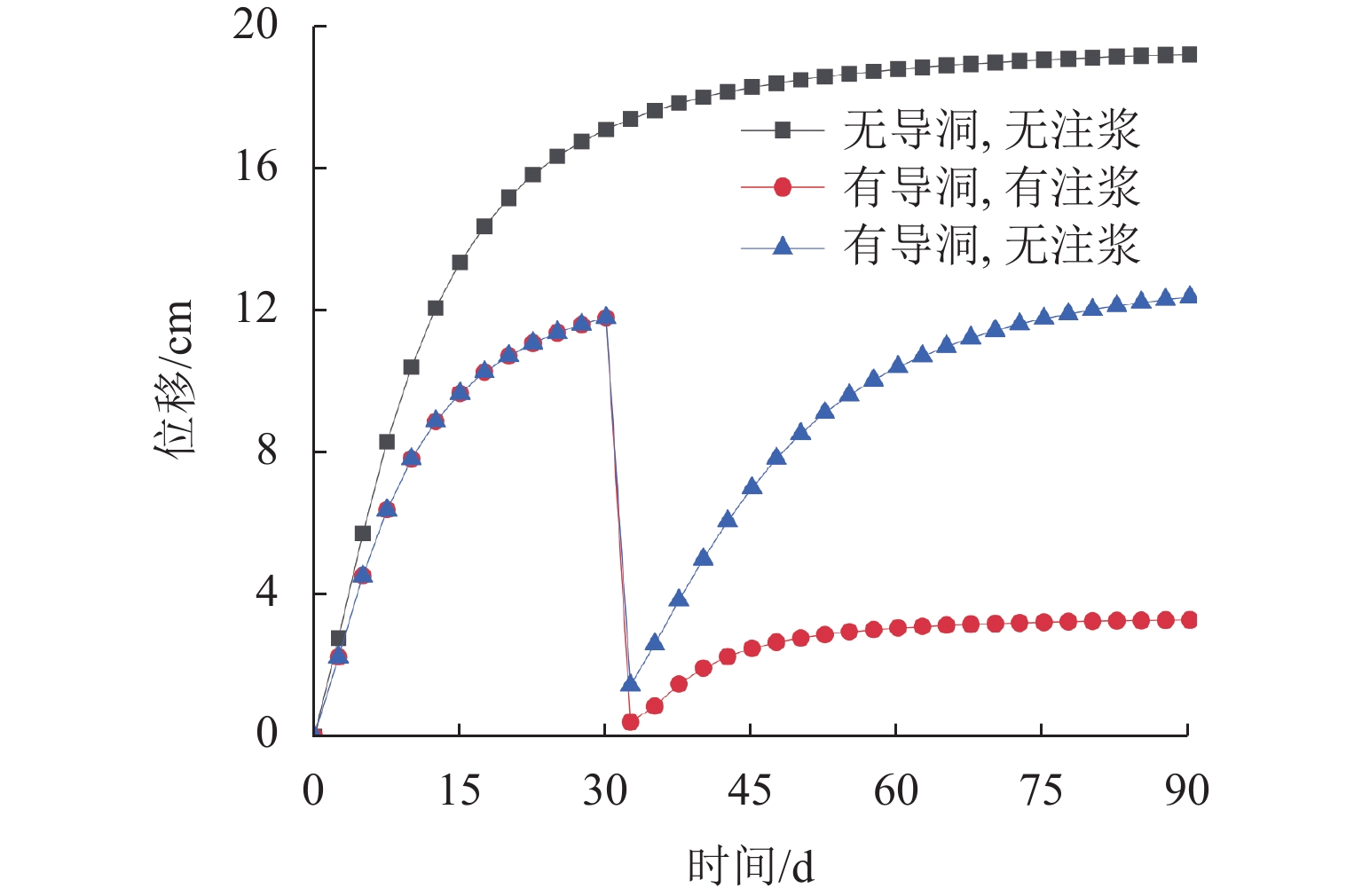
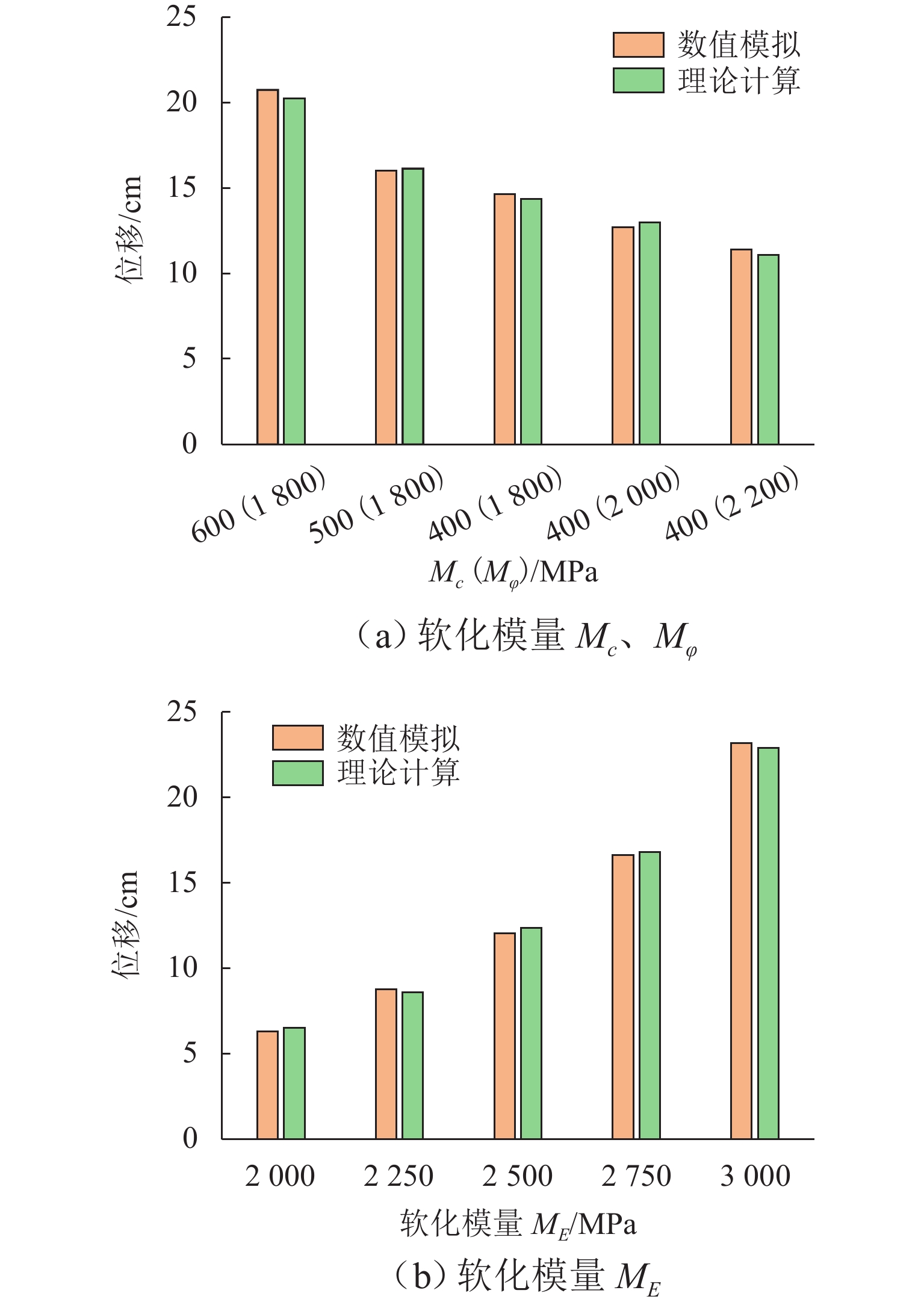
图 4 围岩变形控制效果对比
Figure 4. Comparison of deformation control effects of surrounding rock
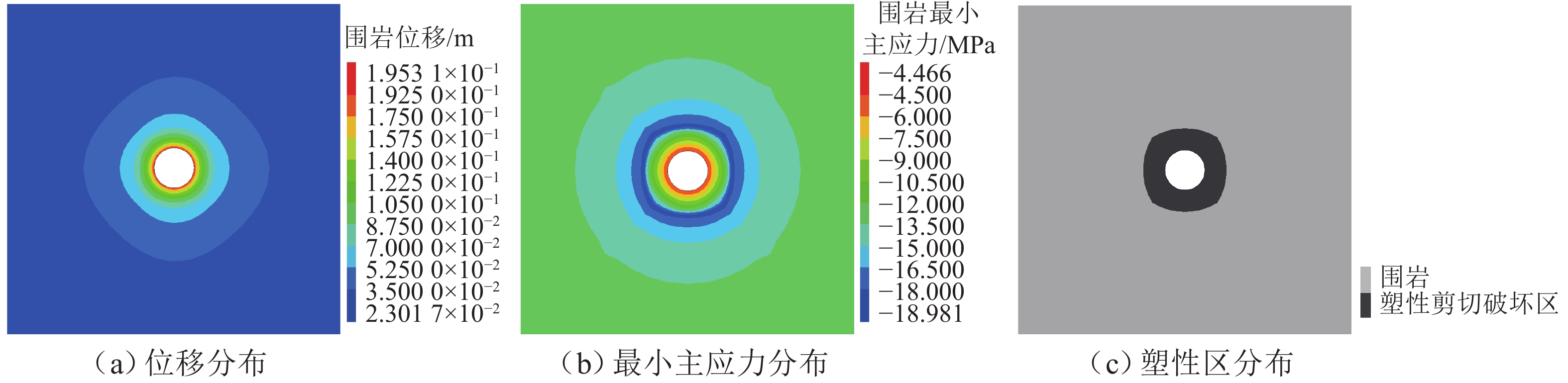
图 5 无导洞无注浆时正洞围岩数值模拟计算结果
Figure 5. Numerical simulation results of main tunnel surrounding rock without guide tunnel and grouting
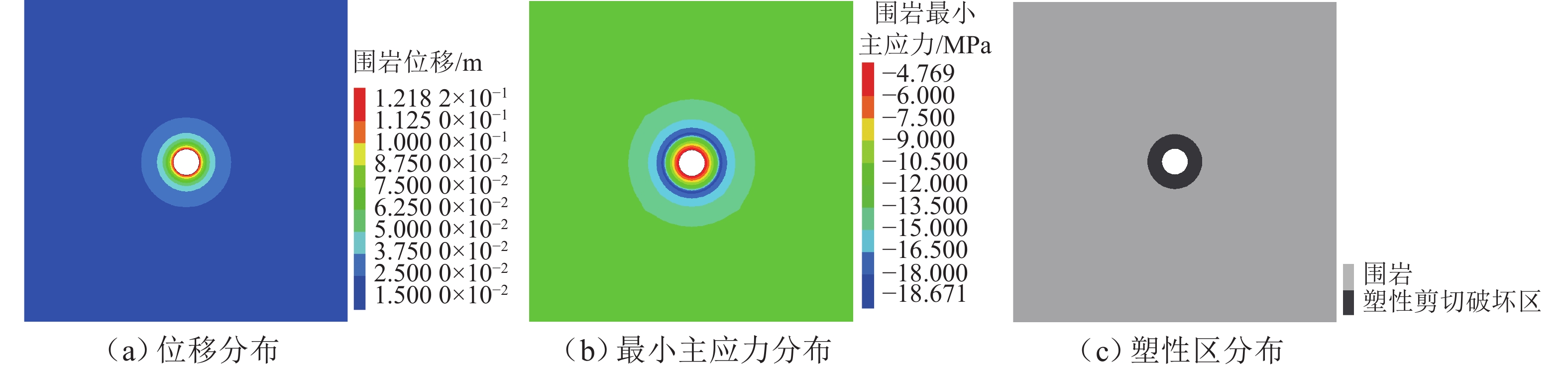
图 6 超前导洞围岩数值模拟计算结果
Figure 6. Numerical simulation results of surrounding rock of advance guide tunnel
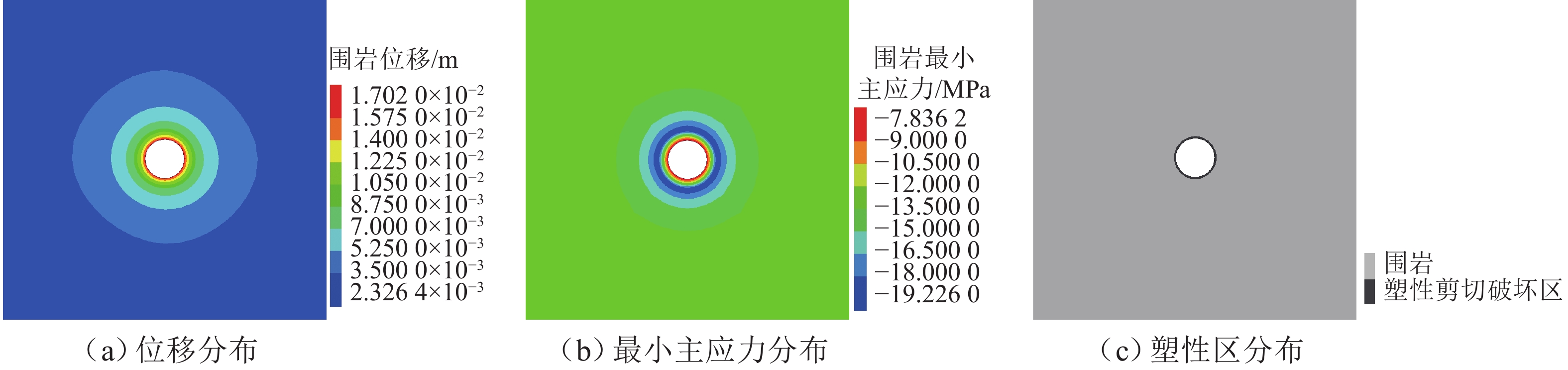
图 7 正洞围岩(注浆后)数值模拟计算结果
Figure 7. Numerical simulation results of main tunnel surrounding rock (after grouting)
表 1 围岩计算参数
Table 1. Calculation parameters of surrounding rock
条件 E/MPa c/MPa φ/(º) v 容重 γ/kN·m−3 Mc/MPa Mφ/MPa P0/MPa 初始值 2 800 3.2 32 残余值 1 000 1.2 20 0.2 20.5 400 1 800 12.2 注浆后 2 500 2.6 28  下载: 导出CSV
下载: 导出CSV
-
[1] HE M C, SUI Q R, LI M N, et al. Compensation excavation method control for large deformation disaster of mountain soft rock tunnel[J]. International Journal of Mining Science and Technology, 2022, 32(5): 951-963. doi: 10.1016/j.ijmst.2022.08.004 [2] 康永水, 耿志, 刘泉声, 等. 我国软岩大变形灾害控制技术与方法研究进展[J]. 岩土力学, 2022, 43(8): 2035-2059.KANG Yongshui, GENG Zhi, LIU Quansheng, et al. Research progress on support technology and methods for soft rock with large deformation hazards in China[J]. Rock and Soil Mechanics, 2022, 43(8): 2035-2059. [3] 王志杰, 周平, 杨建民, 等. 昔格达地层隧道围岩的失稳特征及变形控制工法[J]. 西南交通大学学报, 2019, 54(4): 757-768.WANG Zhijie, ZHOU Ping, YANG Jianmin, et al. Instability properties and deformation control methods of rocks surrounding xigeda strata[J]. Journal of Southwest Jiaotong University, 2019, 54(4): 757-768. [4] DENG H S, FU H L, SHI Y, et al. Countermeasures against large deformation of deep-buried soft rock tunnels in areas with high geostress: a case study[J]. Tunnelling and Underground Space Technology Incorporating Trenchless Technology Research, 2022, 119: 104238.1-104238.19. [5] SUN X M, ZHANG B, ZHANG Y, et al. Field tests and research of large deformation control measures for soft rock tunnel with high geostress[J]. IOP Conference Series: Earth and Environmental Science, 2020, 570(4): 042006.1-042006.9. [6] 李锦辉, 张俊齐, 魏强, 等. 基于自感知纤维增强复合材料锚杆的隧道围岩松动圈识别[J]. 西南交通大学学报, 2024, 59(1): 11-19.LI Jinhui, ZHANG Junqi, WEI Qiang, et al. Loose zone identification for surrounding rock of tunnels using self-sensing fiber reinforced plastic anchors[J]. Journal of Southwest Jiaotong University, 2024, 59(1): 11-19. [7] 王明年, 王志龙, 桂登斌, 等. 开挖方法影响下的深埋隧道形变压力计算方法[J]. 西南交通大学学报, 2021, 56(5): 1116-1124.WANG Mingnian, WANG Zhilong, GUI Dengbin, et al. Calculation method of deformation load of deep-buried tunnel under influence of excavation method[J]. Journal of Southwest Jiaotong University, 2021, 56(5): 1116-1124. [8] 张梅, 徐双永, 张民庆, 等. 高应力软岩隧道超前导洞法应力释放试验研究[J]. 现代隧道技术, 2013, 50(4): 68-75, 83. doi: 10.3969/j.issn.1009-6582.2013.04.011ZHANG Mei, XU Shuangyong, ZHANG Qingmin, et al. Experimental study of stress release using a pilot heading for a highly stressed soft-rock tunnel[J]. Modern Tunnelling Technology, 2013, 50(4): 68-75, 83. doi: 10.3969/j.issn.1009-6582.2013.04.011 [9] 夏才初, 金天垚, 徐晨, 等. 软岩隧道超前导洞应力释放力学机制及适用性[J]. 隧道建设(中英文), 2020, 40(增2): 1-9.XIA Caicu, JIN Tianyao, Xuchen, et al. Mechanical mechanism and applicability of stress release for pilot heading in soft rock tunnel[J]. Tunnel Construction, 2020, 40(S2): 1-9. [10] 刘国庆. 木寨岭隧道软岩大变形段支护措施研究[J]. 现代隧道技术, 2011, 48(4): 135-141, 147.LIU Guoqing. Study of support measures for large deformed section of muzhailing tunnel in soft rocks[J]. Modern Tunnelling Technology, 2011, 48(4): 135-141, 147. [11] 周宗青, 李术才, 李利平, 等. 导洞超前开挖施工性态空间效应分析[J]. 岩石力学与工程学报, 2014, 33(增1): 2611-2619.ZHOU Zongqing, LI Shucai, LI Liping, et al. Analysis of spatial effects of construction behavior on pilot tunnel excavation[J]. Chinese Journal of Rock Mechanics and Engineering, 2014, 33(S1): 2611-2619. [12] 马伟斌, 张梅, 赵有明, 等. 高地应力软岩隧道超前洞室断面优化模拟研究[J]. 铁道工程学报, 2011, 28(9): 58-62.MA Weibin, ZHANG Mei, ZHAO Youming, et al. Simulation study on the section optimization of the super pilot tunnel in high geo-stress tunnel[J]. Journal of Railway Engineering Society, 2011, 28(9): 58-62. [13] 韩常领, 夏才初, 徐晨, 等. 软岩隧道的超前导洞施工位置优化数值分析[J]. 地下空间与工程学报, 2020, 16(增1): 264-269, 277.HAN Changling, XIA Caichu, XU Chen, et al. Numerical analysis on the optimization of the position of the pilot tunnel in soft rock[J]. Chinese Journal of Underground Space and Engineering, 2020, 16(S1): 264-269, 277. [14] 崔光耀, 魏杭杭, 王明胜. 高地应力强风化炭质板岩隧道大变形控制现场试验研究[J]. 现代隧道技术, 2022, 59(3): 183-189, 200.CUI Guangyao, WEI Hanghang, WANG Mingsheng. A field test study on the large deformation control for tunnels built in seriously-weathered carbonaceous slate strata with high geostress[J]. Modern Tunnelling Technology, 2022, 59(3): 183-189, 200. [15] 王道远, 刘佳, 张逴, 等. 高地应力深埋隧道断裂破碎带大变形控制方法现场试验研究[J]. 岩土工程学报, 2020, 42(4): 658-666.WANG Daoyuan, LIU Jia, ZHANG Chuo, et al. Field tests on large deformation control method for surrounding rock of deep tunnel in fault zone with high geostress[J]. Chinese Journal of Geotechnical Engineering, 2020, 42(4): 658-666. [16] 尤显明, 李沿宗. 极高地应力软岩隧道超前导洞应力释放及多层支护变形控制技术[J]. 隧道建设, 2017, 37(7): 832-837. doi: 10.3973/j.issn.1672-741X.2017.07.008YOU Xianming, LI Yanzong. Stress releasing and deformation control technology of multilayer support for pilot heading of a soft rock tunnel with extremely high ground stress[J]. Tunnel Construction, 2017, 37(7): 832-837. doi: 10.3973/j.issn.1672-741X.2017.07.008 [17] WU Y S, TAN Z S, LI S M. Experimental study on the basic characteristics of tunnel in squeezing surrounding rock with large deformation[J]. hina Civil Engineering Journal, 2015, 48: 398-402. [18] 郑可跃, 施成华, 雷明锋, 等. 考虑松动效应的高地应力构造破碎带隧道稳定性分析及大变形支护设计优化[J]. 岩石力学与工程学报, 2021, 40(8): 1603-1613.ZHENG Keyue, SHI Chenghua, LEI Mingfeng, et al. Stability analysis and support design optimization of large-deformation tunnels in structural fracture zones with high in situ stresses considering loose effect[J]. Chinese Journal of Rock Mechanics and Engineering, 2021, 40(8): 1603-1613. [19] 李峰. 高地应力构造破碎带隧道大变形灾变机制及控制技术研究[J]. 铁道科学与工程学报, 2021, 18(5): 1222-1230.LI Feng. Study on the formation mechanism and large deformation control of tunnel in structural fracture zone with high in-situ stress[J]. Journal Of Railway Science And Engineering, 2021, 18(5): 1222-1230. [20] 张广泽, 邓建辉, 王栋, 等. 隧道围岩构造软岩大变形发生机理及分级方法[J]. 工程科学与技术, 2021, 53(1): 1-12.ZHANG Guangze, DENG Jianhui, WANG Dong, et al. Mechanism and classification of tectonic-induced large deformation of soft rock tunnels[J]. Advanced Engineering Sciences, 2021, 53(1): 1-12. [21] PAN J L, GAO Z N, REN F H. Effect of strength criteria on surrounding rock of circular roadway considering strain softening and dilatancy[J]. Meitan Xuebao Journal of the China Coal Society, 2018, 43(12): 3293-3301. [22] CHEN L, MAO X B, LI M, et al. A new strain-softening constitutive model for circular opening considering plastic bearing behavior and its engineering application[J]. Mathematical Problems in Engineering, 2018, 2018: 4521492.1-4521492.13. [23] 陆银龙, 王连国, 杨峰, 等. 软弱岩石峰后应变软化力学特性研究[J]. 岩石力学与工程学报, 2010, 29(3): 640-648.LU Yinlong, WANG Lianguo, YANG Feng, et al. Post-peak strain softening mechanical properties of weak rock[J]. Chinese Journal of Rock Mechanics and Engineering, 2010, 29(3): 640-648. [24] 郑颖人, 孔亮. 岩土塑性力学[M]. 2版. 北京: 中国建筑工业出版社, 2019: 73-79. [25] 徐芝纶. 弹性力学简明教程[M]. 北京: 高等教育出版社, 2013: 70-72. -

 下载:
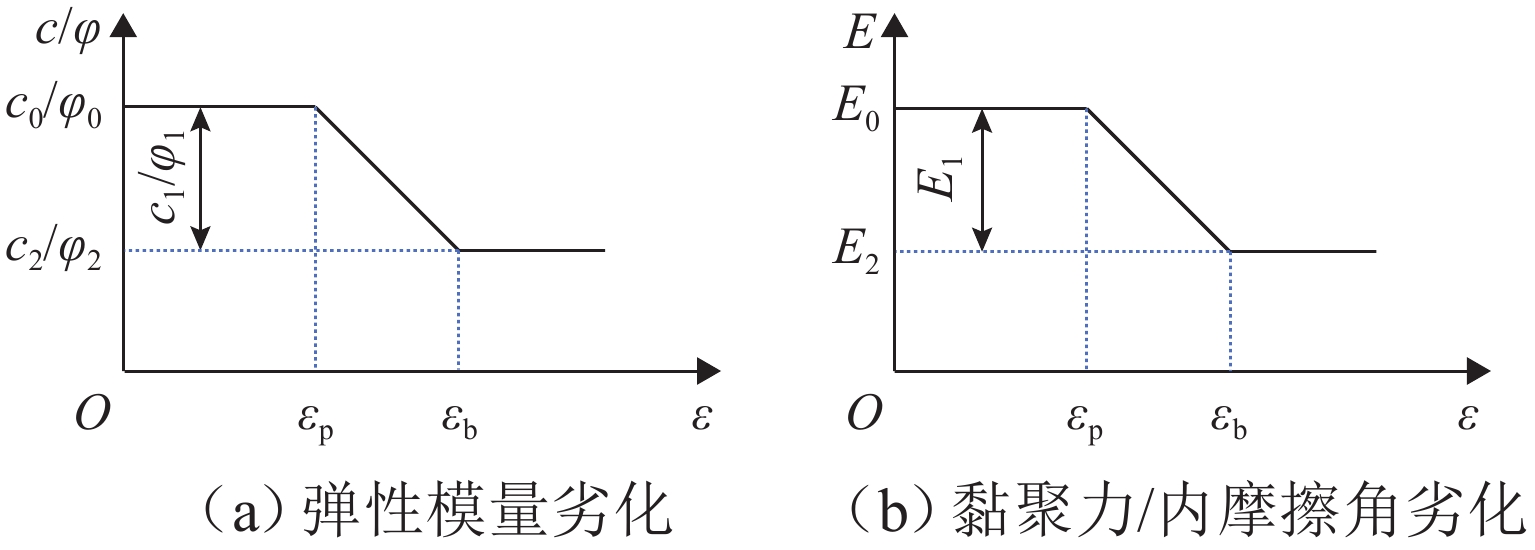
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 399
- HTML全文浏览量: 228
- PDF下载量: 55
- 被引次数: 0