

Collaborative Optimization of Timetable and Operation Path for Long Tunnel Construction Vehicles
-
摘要:
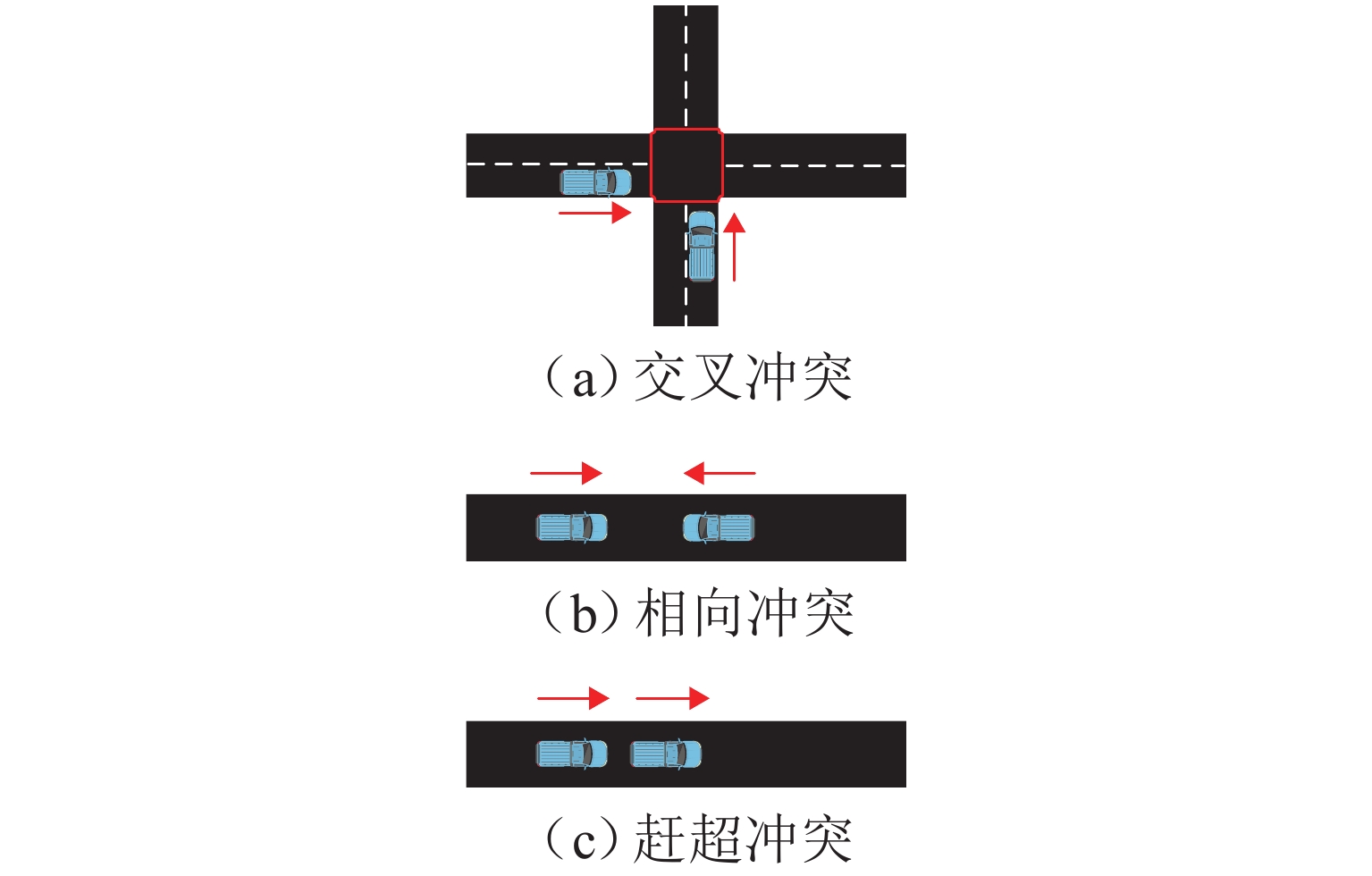
长大隧道恶劣环境与复杂交通网络为多工种施工车辆的安全、效率和有序运输带来诸多挑战. 针对目前隧道内部运输组织管理仍停留在宏观组织策略层面,缺乏对施工车辆时刻表和运行路径做出精细化决策的问题,本文提出考虑交通冲突的长大隧道内部多工种施工车辆的时刻表和运行路径优化模型,在疏解隧道内部车流间交通冲突的前提下最小化施工车辆的总运行(行驶)时间,以提高生产效率和保证系统安全;在此基础上,将优化模型进行线性化处理,重构为整数线形规划模型,通过Gurobi求解器进行求解. 研究结果表明:隧道运输组织方案在优化前后,车辆的总运行(行驶)时间保持512 min不变,而交叉冲突从19个减至0个,相向冲突从2个减至0,即优化方案在不增加施工车辆总运行时间的前提下,完全避免了交通冲突,保证施工车辆的运输安全,具备可实操性.
Abstract:The harsh environment and complex transportation network of long tunnels pose many challenges to the safe, efficient, and orderly transportation of multi-type construction vehicles. At present, transportation organization and management within tunnels still remain at the macro strategy level, lacking refined decision-making regarding construction vehicle timetables and operation paths. To address the above issues, an optimization model for the timetables and operation path of multi-type construction vehicles in long tunnels was proposed, with traffic conflicts taken into consideration. This model aims to minimize the total operating (driving) time of construction vehicles while alleviating traffic conflicts within the tunnel, thereby improving production efficiency and ensuring system safety. On this basis, the optimization model was linearized and reconstructed as an integer linear programming model, which was solved using the Gurobi solver. The results show that before and after the optimization of the tunnel transportation organization scheme, the total operating (driving) time of the vehicles remains unchanged at 512 minutes, while the number of cross conflicts is reduced from 19 to 0, and the number of opposite conflicts is reduced from 2 to 0. This indicates that the optimization scheme completely avoids traffic conflicts without increasing the total operating time of construction vehicles, ensuring transportation safety and demonstrating practical feasibility.
-
Key words:
- long tunnel /
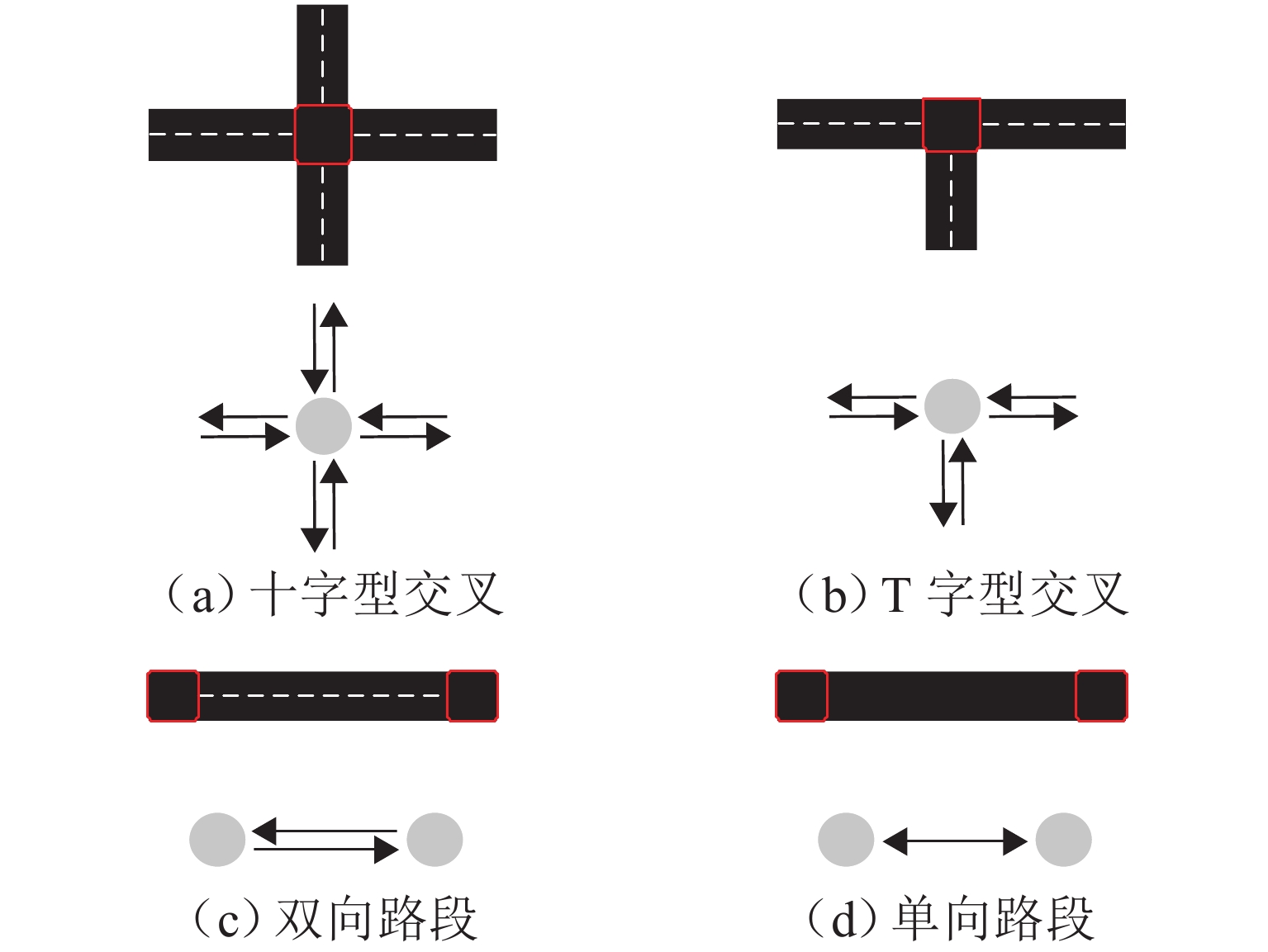
- tunnel junctions /
- construction transportation organization /
- traffic conflict /
- timetable /
- vehicle path
-
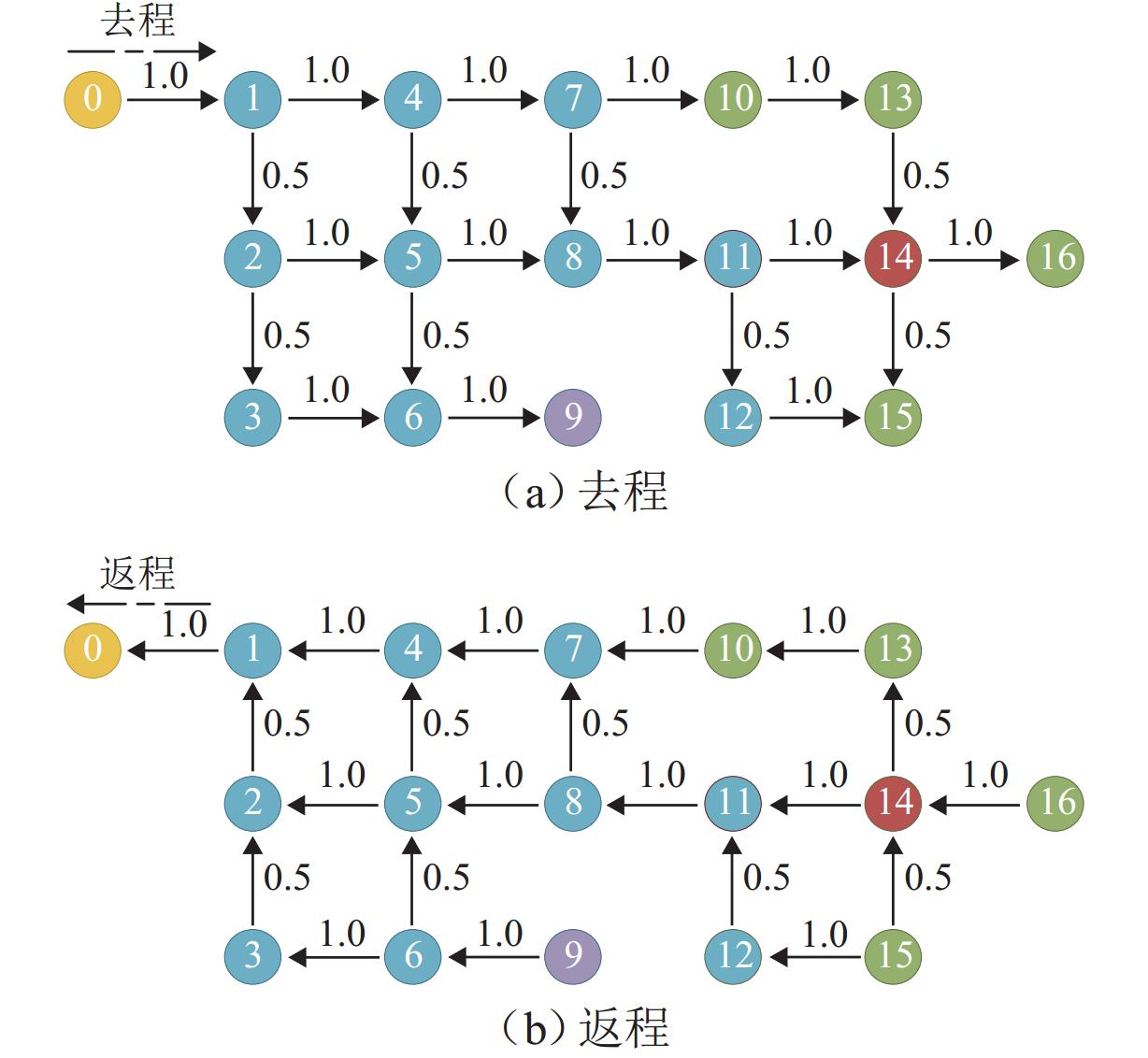
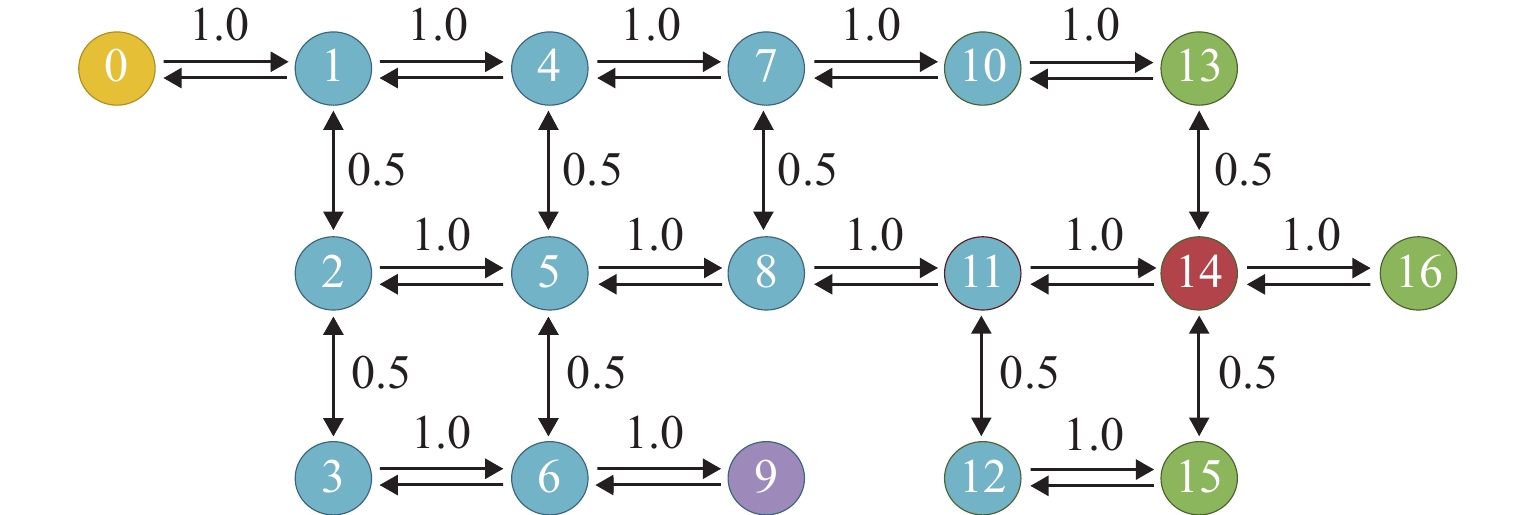
图 5 去返程方向的隧道网络拓扑图
Figure 5. Tunnel network topology in inbound and outbound directions
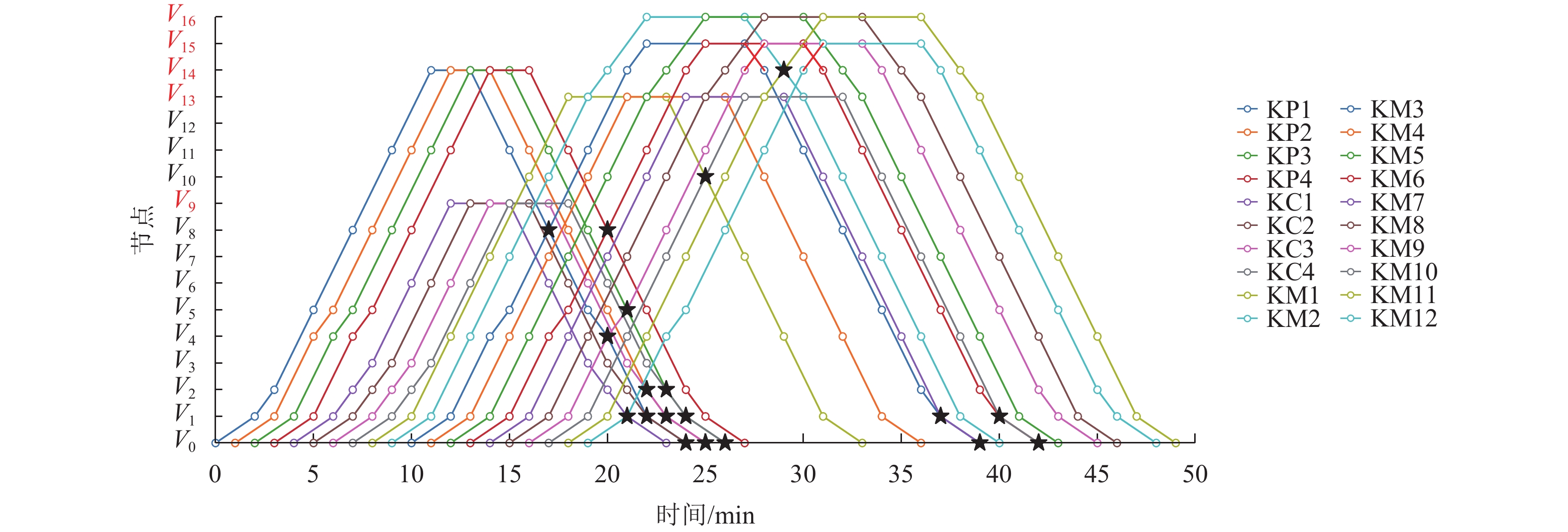
图 6 隧道运输组织初始方案时空轨迹
Figure 6. Spatiotemporal trajectory of initial schemes for tunnel transportation organization
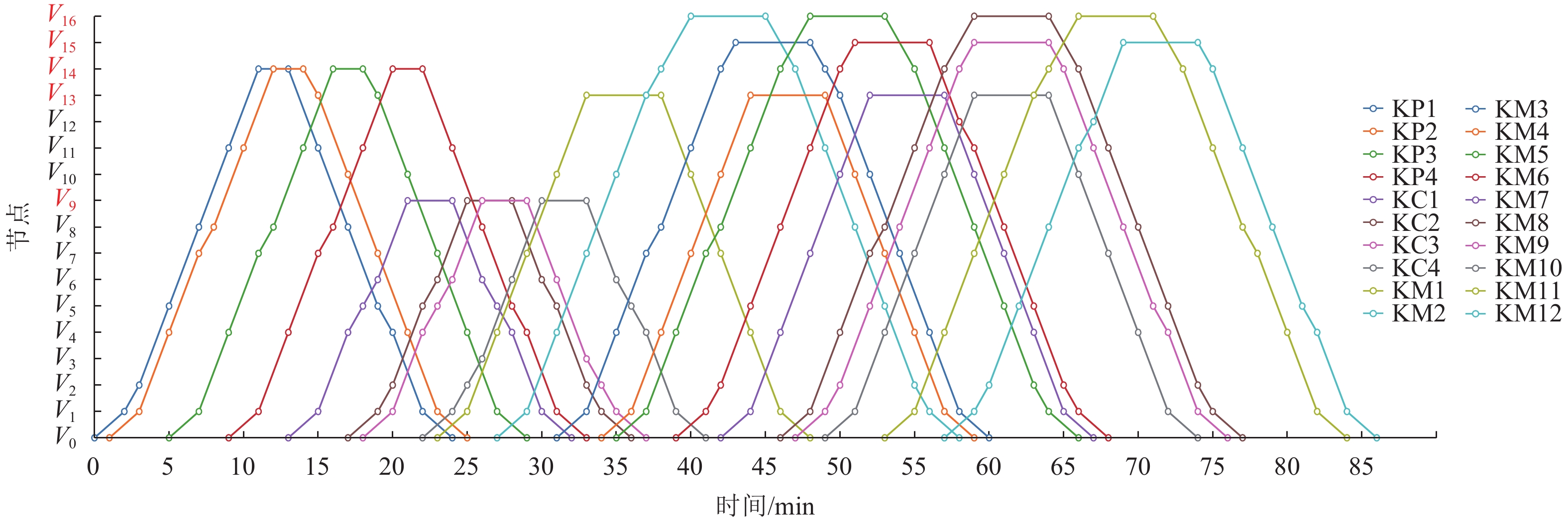
图 7 隧道运输组织优化方案时空轨迹
Figure 7. Spatiotemporal trajectory of optimized schemes for tunnel transportation organization
表 1 施工运输组织初始方案
Table 1. Initial schemes of construction transportation organization
编号 车辆进入隧道运行方案 车辆离开隧道运行方案 始发时间/min 运行路径 始发时间/min 运行路径 KP1 0 0—1—2—5—8—11—14 13 14—11—8—5—4—1—0 KP2 1 0—1—4—5—8—11—14 14 14—11—8—5—2—1—0 KP3 2 0—1—4—5—8—11—14 15 14—11—8—5—2—1—0 KP4 3 0—1—4—5—8—11—14 16 14—11—8—5—2—1—0 KC1 4 0—1—2—3—6—9 15 9—6—3—2—1—0 KC2 5 0—1—2—3—6—9 16 9—6—3—2—1—0 KC3 6 0—1—2—3—6—9 17 9—6—3—2—1—0 KC4 7 0—1—2—3—6—9 18 9—6—3—2—1—0 KM1 8 0—1—4—7—10—13 23 13—10—7—4—1—0 KM2 9 0—1—4—7—10—13—14—16 27 16—14—13—10—7—4—1—0 KM3 10 0—1—4—5—8—11—14—15 27 15—14—11—8—5—2—1—0 KM4 11 0—1—4—7—10—13 26 13—10—7—4—1—0 KM5 12 0—1—4—7—10—13—14—16 30 16—14—13—10—7—4—1—0 KM6 13 0—1—4—5—8—11—14—15 30 15—14—11—8—5—2—1—0 KM7 14 0—1—4—7—10—13 29 10—7—4—1—0 KM8 15 0—1—4—7—10—13—14—16 33 16—14—13—10—7—4—1—0 KM9 16 0—1—4—5—8—11—14—15 33 15—14—11—8—5—2—1—0 KM10 17 0—1—4—7—10—13 32 13—10—7—4—1—0 KM11 18 0—1—4—7—10—13—14—16 36 16—14—13—10—7—4—1—0 KM12 19 0—1—4—5—8—11—14—15 36 15—14—11—8—5—2—1—0  下载: 导出CSV
下载: 导出CSV
表 2 施工运输组织优化方案
Table 2. Optimized construction transportation organization schemes
编号 车辆进入隧道运行方案 车辆离开隧道运行方案 始发时间/min 运行路径 始发时间/min 运行路径 KP1 0 0—1—2—5—8—11—14 13 14—11—8—5—4—1—0 KP2 1 0—1—4—7—8—11—14 14 14—13—10—7—4—1—0 KP3 5 0—1—4—7—8—11—14 18 14—13—10—7—4—1—0 KP4 9 0—1—4—7—8—11—14 22 14—11—8—5—4—1—0 KC1 13 0—1—4—5—6—9 24 9—6—5—4—1—0 KC2 17 0—1—2—5—6—9 28 9—6—5—2—1—0 KC3 18 0—1—4—5—6—9 29 9—6—3—2—1—0 KC4 22 0—1—2—3—6—9 33 9—6—5—4—1—0 KM1 23 0—1—4—7—10—13 38 13—10—7—4—1—0 KM2 27 0—1—4—7—10—13—14—16 45 16—14—11—8—5—2—1—0 KM3 31 0—1—4—7—8—11—14—15 48 15—14—13—10—7—4—1—0 KM4 34 0—1—4—7—10—13 49 13—10—7—4—1—0 KM5 35 0—1—4—7—8—11—14—16 53 16—14—11—8—5—2—1—0 KM6 39 0—1—2—5—8—11—14—15 56 15—12—11—8—5—2—1—0 KM7 42 0—1—4—7—10—13 57 13—10—7—4—1—0 KM8 46 0—1—4—7—8—11—14—16 64 16—14—11—8—5—2—1—0 KM9 47 0—1—2—5—8—11—14—15 64 15—14—11—8—5—4—1—0 KM10 49 0—1—4—7—10—13 64 13—10—7—4—1—0 KM11 53 0—1—4—7—10—13—14—16 71 16—14—11—8—7—4—1—0 KM12 57 0—1—2—5—8—11—12—15 74 15—14—11—8—5—4—1—0
下载: 导出CSV
表 3 初始和优化方案的目标函数值和交通冲突数量
Table 3. Objective function values and number of traffic conflicts for initial and optimized schemes
方案 目标函数值/min 交通冲突数量/个 交叉 相向 赶超 初始方案 512 19 2 0 优化方案 512 0 0 0
下载: 导出CSV
-
[1] 秦峰, 王少飞, 肖博, 等. 截至2021年底中国10 km以上特长公路隧道统计[J]. 隧道建设(中英文), 2022, 42(6): 1111-1116.QIN Feng, WANG Shaofei, XIAO Bo, et al. Statistics of super-long highway tunnels over 10 km in China as of the end of 2021[J]. Tunnel Construction, 2022, 42(6): 1111-1116. [2] 巩江峰, 唐国荣, 王伟, 等. 截至2021年底中国铁路隧道情况统计及高黎贡山隧道设计施工概况[J]. 隧道建设(中英文), 2022, 42(3): 508-517.GONG Jiangfeng, TANG Guorong, WANG Wei, et al. Statistics of China’s railway tunnels by the end of 2021 and design & construction overview of Gaoligongshan tunnel[J]. Tunnel Construction, 2022, 42(3): 508-517. [3] 麦继婷, 陈春光. 秦岭特长隧道内温度预测[J]. 西南交通大学学报, 1998(2): 41-45. [4] 杜志刚, 卓诗琪, 傅金乾, 等. 城市长大隧道交通安全应急设计优化研究框架[J]. 武汉理工大学学报(交通科学与工程版), 2023, 47(1): 37-41.DU Zhigang, ZHUO Shiqi, FU Jinqian, et al. Research framework for optimization of traffic safety emergency design of urban long tunnel[J]. Journal of Wuhan University of Technology (Transportation Science & Engineering), 2023, 47(1): 37-41. [5] SOUSA R L, EINSTEIN H H. Lessons from accidents during tunnel construction[J]. Tunnelling and Underground Space Technology, 2021, 113: 103916.1-103916.28. [6] ZHU Y M, ZHOU J J, ZHANG B, et al. Statistical analysis of major tunnel construction accidents in China from 2010 to 2020[J]. Tunnelling and Underground Space Technology, 2022, 124: 104460.1-104460.14. [7] JIANG X H, LI K, CUI X Y. Study on traffic organization around pivotal tunnel entrance/exit[J]. IOP Conference Series: Materials Science and Engineering, 2020, 741(1): 012048.1-012048.6. [8] LIU M K, XU Z P. Research on urban path selection of construction vehicles based on bi-objective optimization[J]. Plos One, 2022, 17(10): 0275678.1-0275678.16. [9] 林杉, 许宏科, 刘占文. 一种高速公路隧道交通流元胞自动机模型[J]. 长安大学学报(自然科学版), 2012, 32(6): 73-77.LIN Shan, XU Hongke, LIU Zhanwen. One cellular automaton traffic flow model for expressway tunnel[J]. Journal of Chang’an University (Natural Science Edition), 2012, 32(6): 73-77. [10] 高壮. 重载铁路无砟轨道施工技术及物流组织研究[J]. 价值工程, 2019, 38(2): 105-107.GAO Zhuang. Research on construction technology and logistics organization of ballastless track for long and heavy haul railway[J]. Value Engineering, 2019, 38(2): 105-107. [11] ZHANG Y X, PENG Q Y, YAO Y, et al. Solving cyclic train timetabling problem through model reformulation: extended time-space network construct and alternating direction method of multipliers methods[J]. Transportation Research Part B: Methodological, 2019, 128: 344-379. doi: 10.1016/j.trb.2019.08.001 [12] 王志建, 刘士杰, 周锦瑶, 等. 考虑个性化出行需求的多模式公交路径规划[J]. 西南交通大学学报, 2022, 57(6): 1319-1325, 1333.WANG Zhijian, LIU Shijie, ZHOU Jinyao, et al. Multimodal public transportation route planning considering personalized travel demand[J]. Journal of Southwest Jiaotong University, 2022, 57(6): 1319-1325, 1333. [13] CHERIF G, TROUILLET B, TOGUYENI A K A. Modeling and routing problems of automated port using T-TPN and Beam search[C]//2022 8th International Conference on Control, Decision and Information Technologies (CoDIT). Istanbul: IEEE, 2022: 1201-1206. [14] 徐翔斌, 李紫阳. 基于离散时空网络的多自动引导车路径规划问题[J]. 科学技术与工程, 2021, 21(33): 14209-14219. doi: 10.3969/j.issn.1671-1815.2021.33.025XU Xiangbin, LI Ziyang. Path planning problem of multiple automatic guided vehicle based on discrete space-time network[J]. Science Technology and Engineering, 2021, 21(33): 14209-14219. doi: 10.3969/j.issn.1671-1815.2021.33.025 [15] ZHANG Z, GUO Q, YUAN P J. Conflict-free route planning of automated guided vehicles based on conflict classification[C]//2017 IEEE International Conference on Systems, Man, and Cybernetics (SMC). Banff: IEEE, 2017: 1459-1464. [16] 李珣, 程硕, 吴丹丹, 等. 车路协同下基于元胞自动机的精细交通流模型[J]. 西南交通大学学报, 2023, 60(1): 225-232.LI Xun, CHEN Shuo, WU Dandan, et al. Refined traffic flow model based on cellular automaton under cooperative vehicle infrastructure system[J]. Journal of Southwest Jiaotong University, 2023, 60(1): 225-232. [17] 李英帅, 马泽超, 王雯婧, 等. 考虑非机动车影响的直线式单泊位公交停靠站设置优化[J]. 交通信息与安全, 2021, 39(5): 137-143.LI Yingshuai, MA Zhechao, WANG Wenjing, et al. Optimization of single-berth curbside bus stops considering impacts of non-motorized vehicles[J]. Journal of Transport Information and Safety, 2021, 39(5): 137-143. [18] 中铁一局集团有限公司. 铁路隧道工程施工技术指南: TZ 204—2008[S]. 北京: 中国铁道出版社, 2009. [19] 鲜国. 成兰铁路跃龙门隧道动态施工组织管理研究[J]. 隧道建设(中英文), 2020, 40(3): 452-463XIAN GUO. Dynamic construction organization management of yuelongmen tunnel of chengdu-lanzhou railway[J]. Tunnel Construction, 2020, 40(3): 452-463. -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 274
- HTML全文浏览量: 216
- PDF下载量: 30
- 被引次数: 0