

Intelligent Extraction Method of Overhead Catenary Point Cloud Wire Features of Railway Stations Guided by Knowledge
-
摘要:
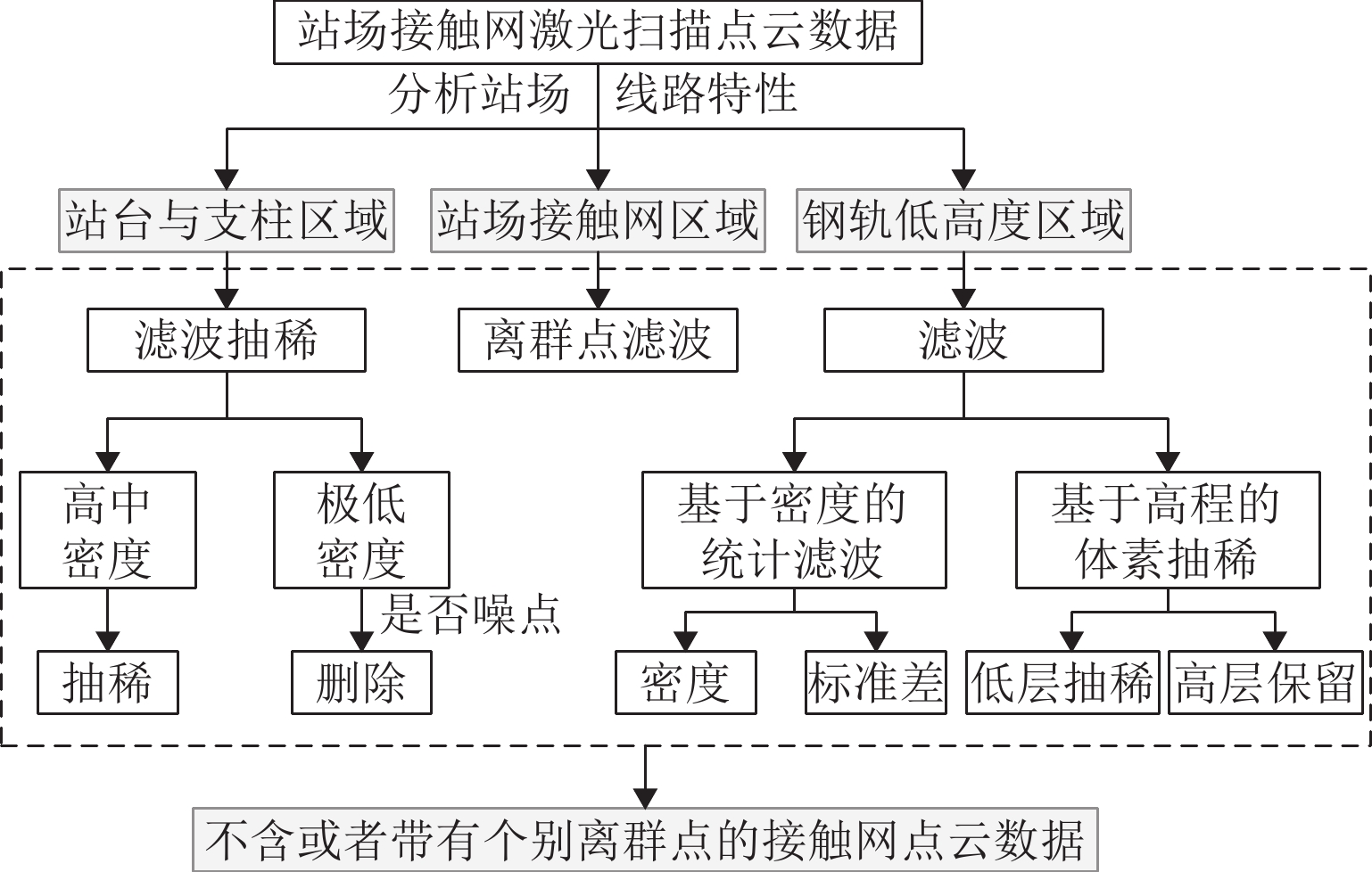
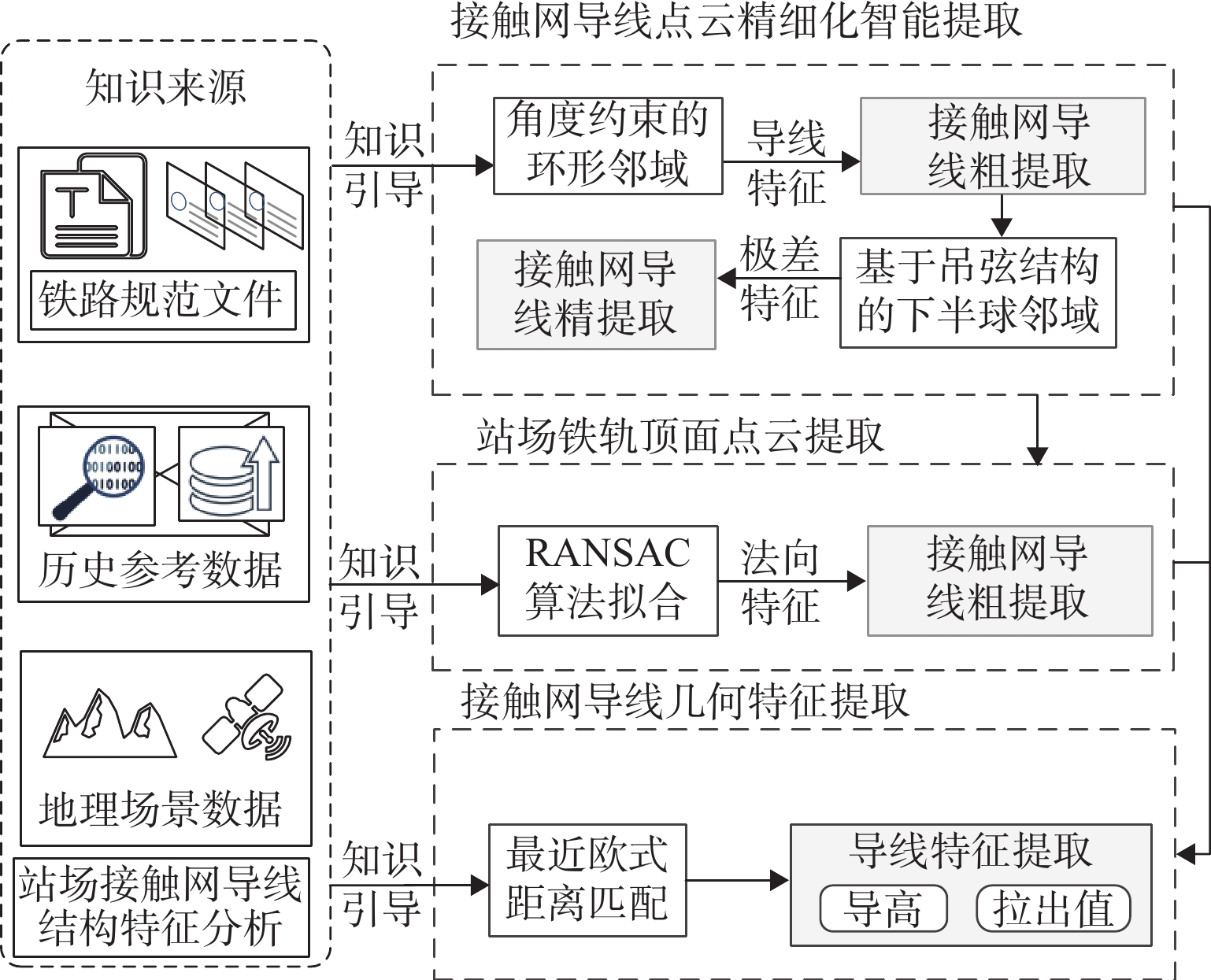
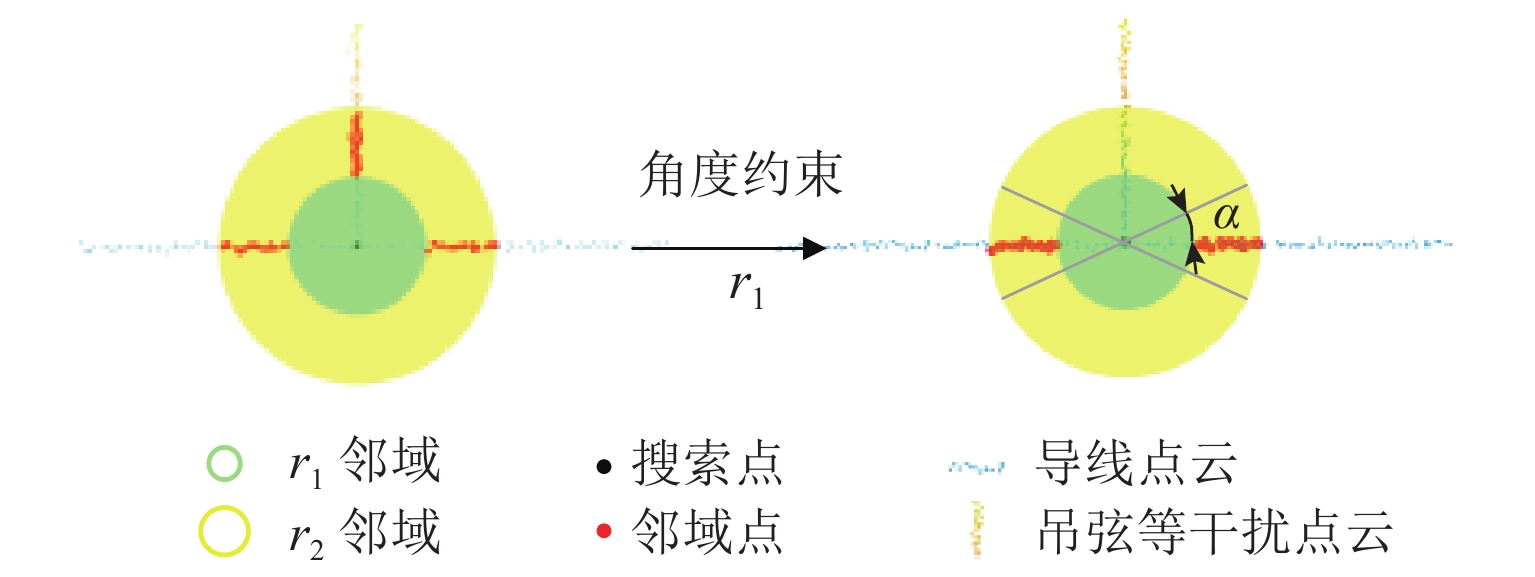
为解决铁路站场接触网点云噪声分布不规律及语义分割难度大的问题,提出一种智能提取方法,以增强接触网异常检测能力. 首先,对站场接触网场景数据进行深入分析,构建导线及钢轨顶面点云提取的知识框架;其次,考虑站场接触网点云空间特征,设计站场关键要素点云的分割与融合滤波方法;然后,建立站场接触网强空间语义约束规则,提出知识引导的导线特征智能精细提取方法;基于此,采用WHU-TLS等站场点云数据集,搭建实验平台并开展实验分析,实验结果表明:在部分点云缺失以及噪声干扰等复杂环境下,本文方法易于操作且自动化程度高,相比传统导线特征提取方法耗时最少,100 m范围内站场接触网导线特征提取的平均精度达到 ±5 mm,能够有效支撑铁路站场接触网几何特征的智能检测.
Abstract:To address the irregular noise distribution and difficult semantic segmentation in overhead catenary point clouds of railway stations and enhance the detection of overhead catenary anomalies, an intelligent extraction method was proposed. Firstly, the overhead catenary scene data of railway stations was analyzed, and the knowledge framework for wire and rail top surface point cloud extraction was constructed. Secondly, the spatial features of overhead catenary point clouds of railway stations were considered, and the segmentation and fusion filtering methods of key element point clouds of railway stations were designed. Then, the strong spatial semantic constraint rules of the overhead catenary of railway stations were established, and a knowledge-guided intelligent and fine extraction method for wire features was proposed. On this basis, WHU-TLS and other station point cloud datasets were used to build an experimental platform and carry out experimental analysis. The results show that in complex environments with partial missing of point clouds and noise interference, the proposed method is easy to operate and highly automated. Compared to traditional methods for extracting wire features, it requires the least time and achieves an average precision of ±5 mm in extracting overhead catenary wire features within 100 m, effectively supporting the intelligent detection of geometric features in overhead catenary of railway stations.
-
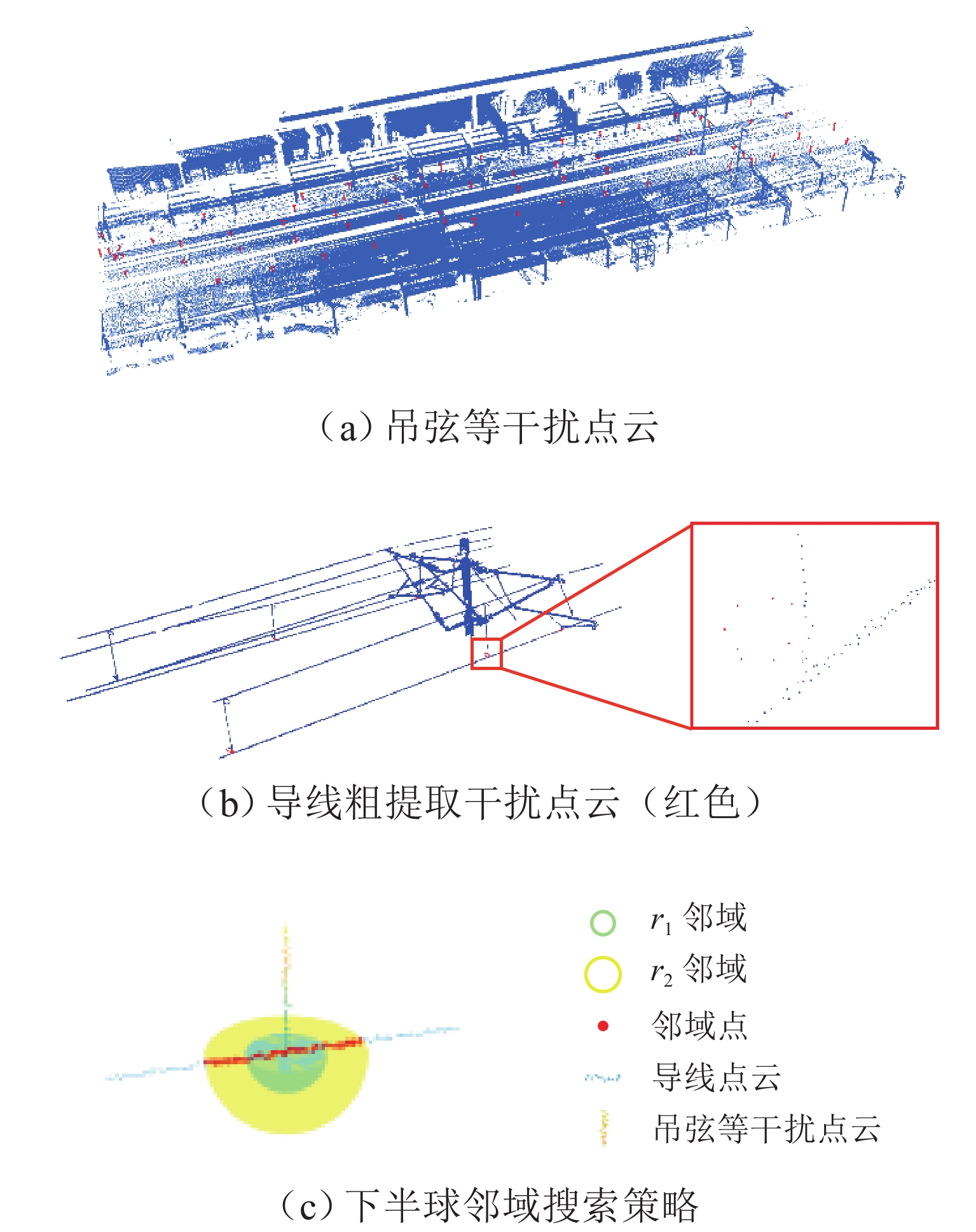
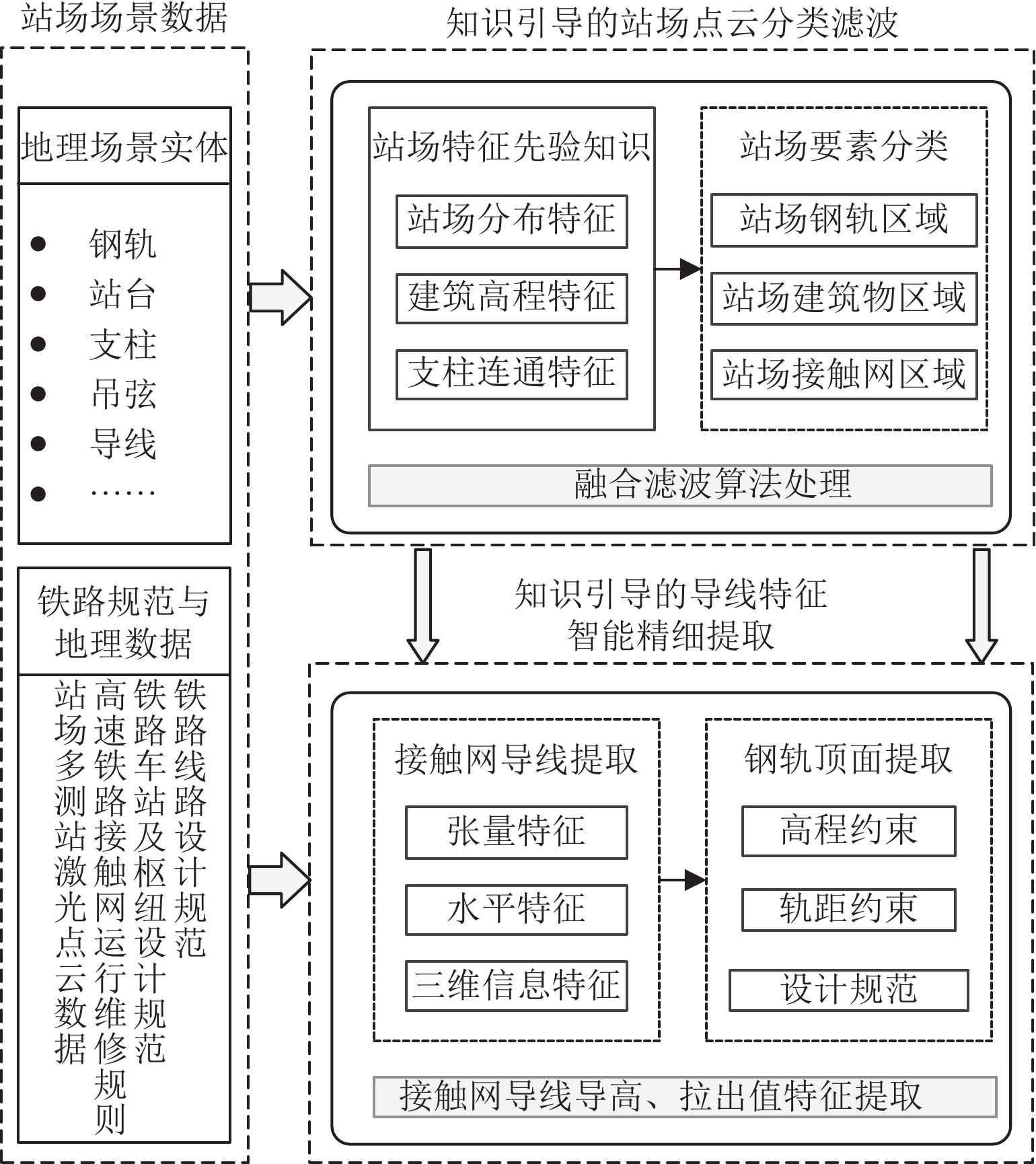
图 5 接触网导线精细提取方法
Figure 5. Method for fine extraction of overhead catenary wire features
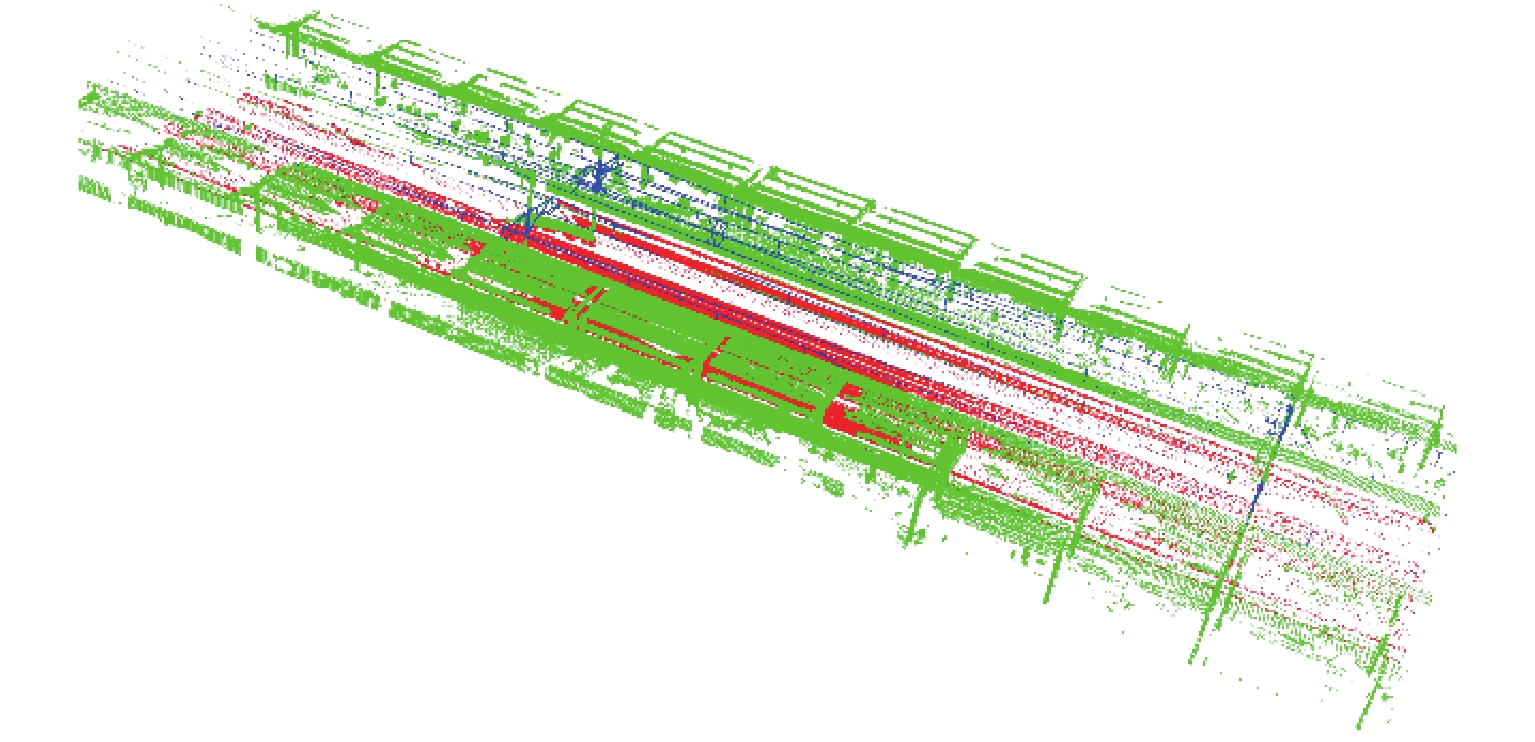
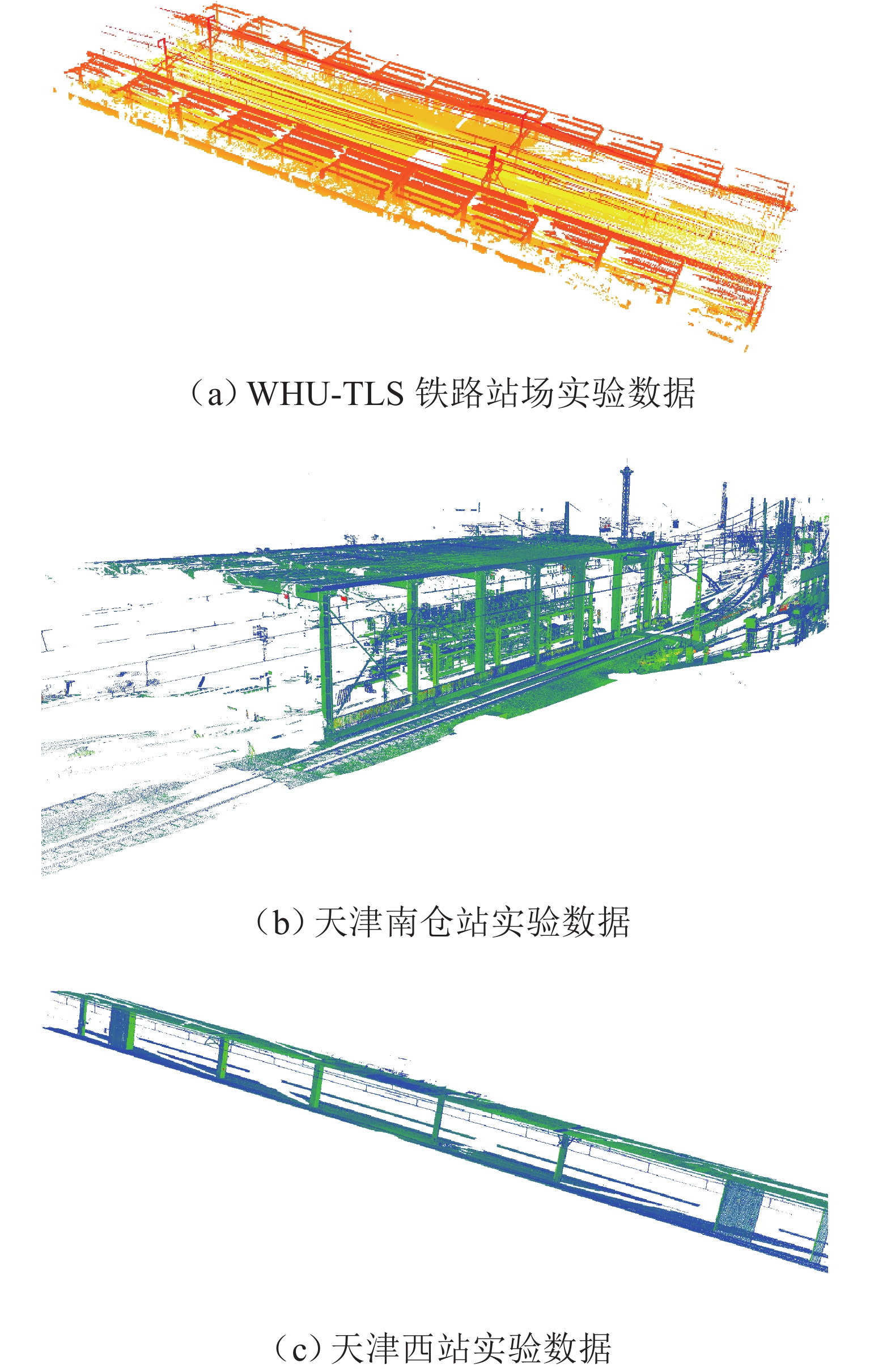
图 8 站场点云分类滤波抽稀结果
Figure 8. Results of station point cloud after classification, filtering, and thinning
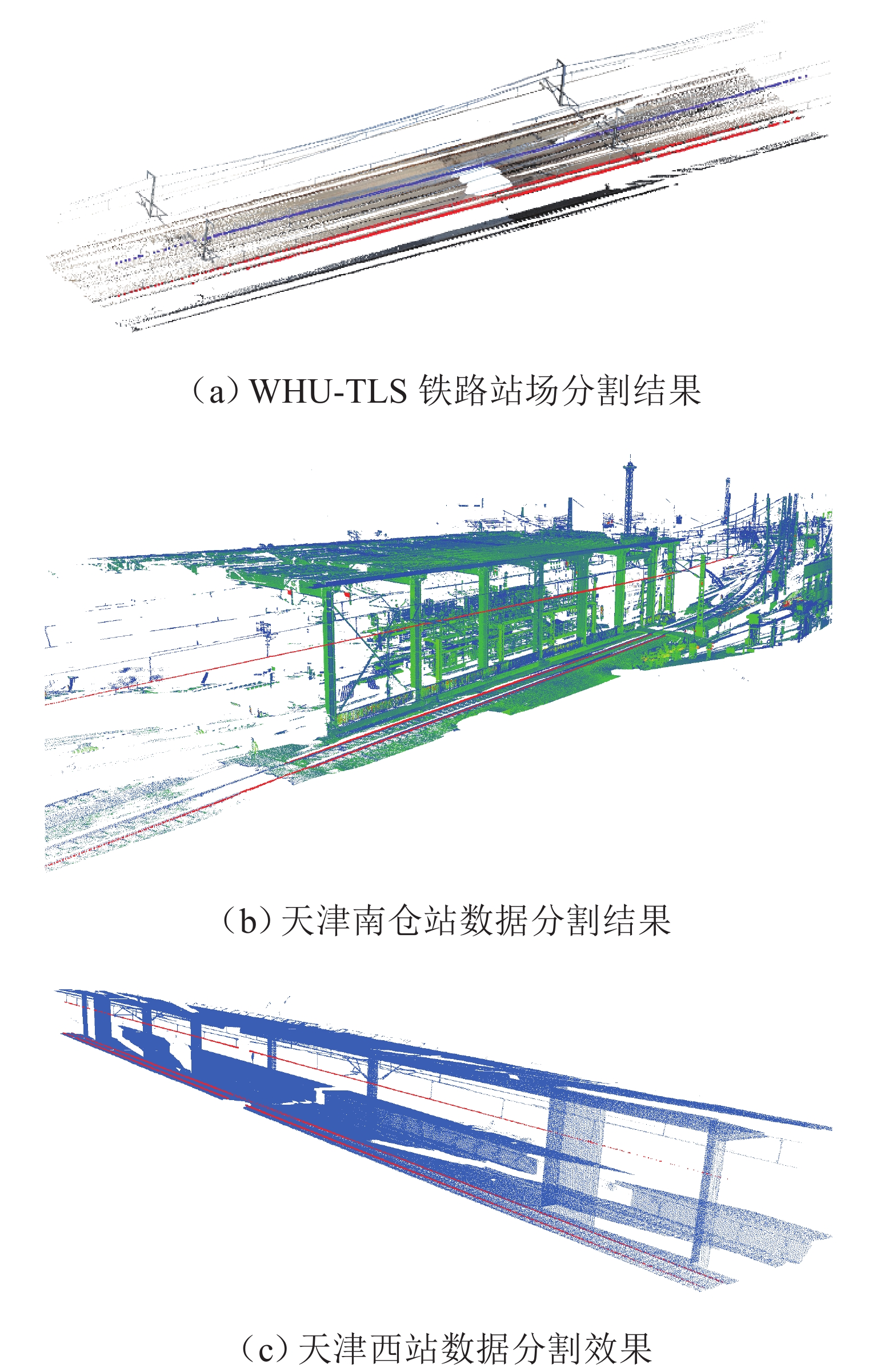
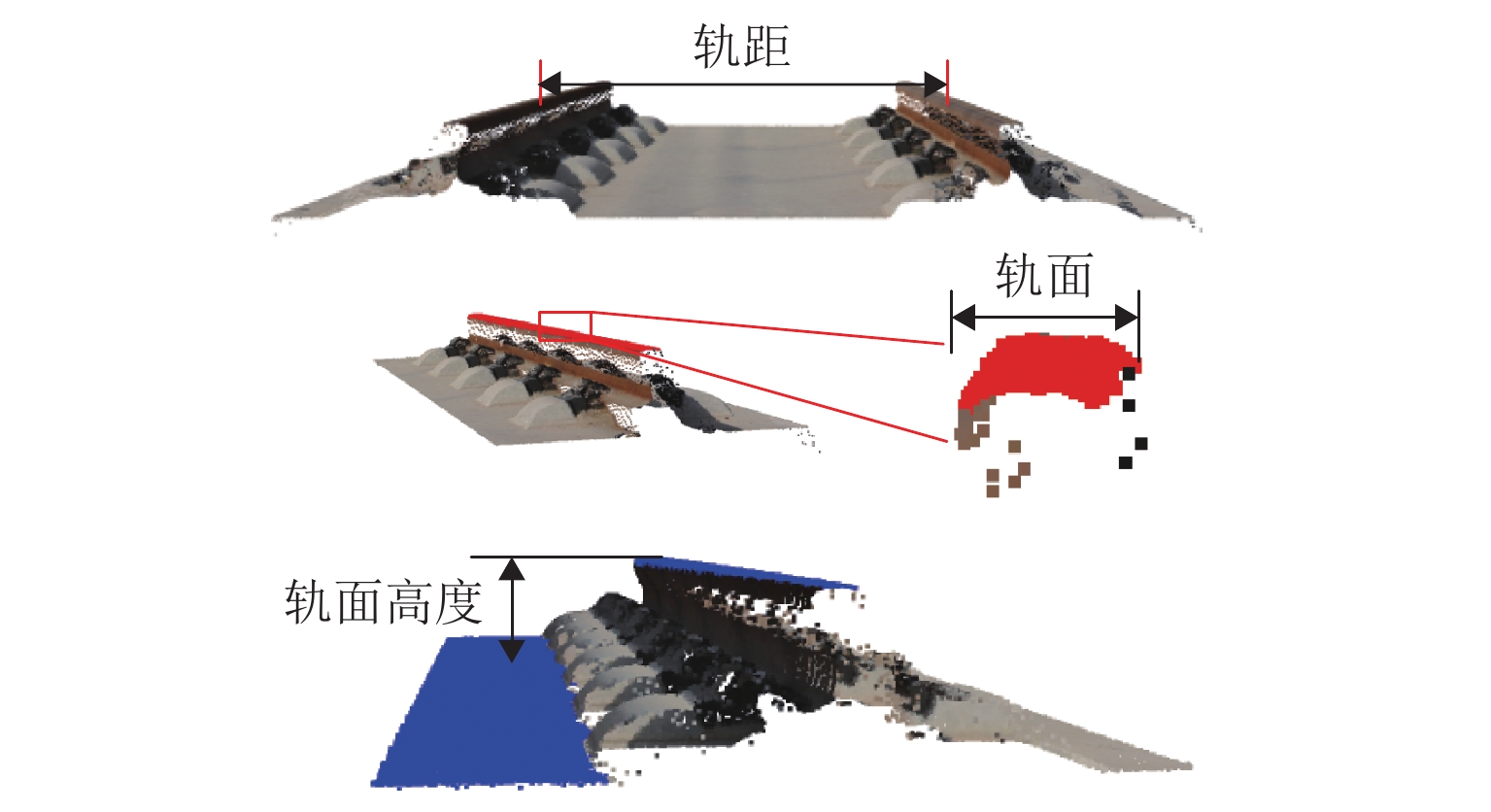
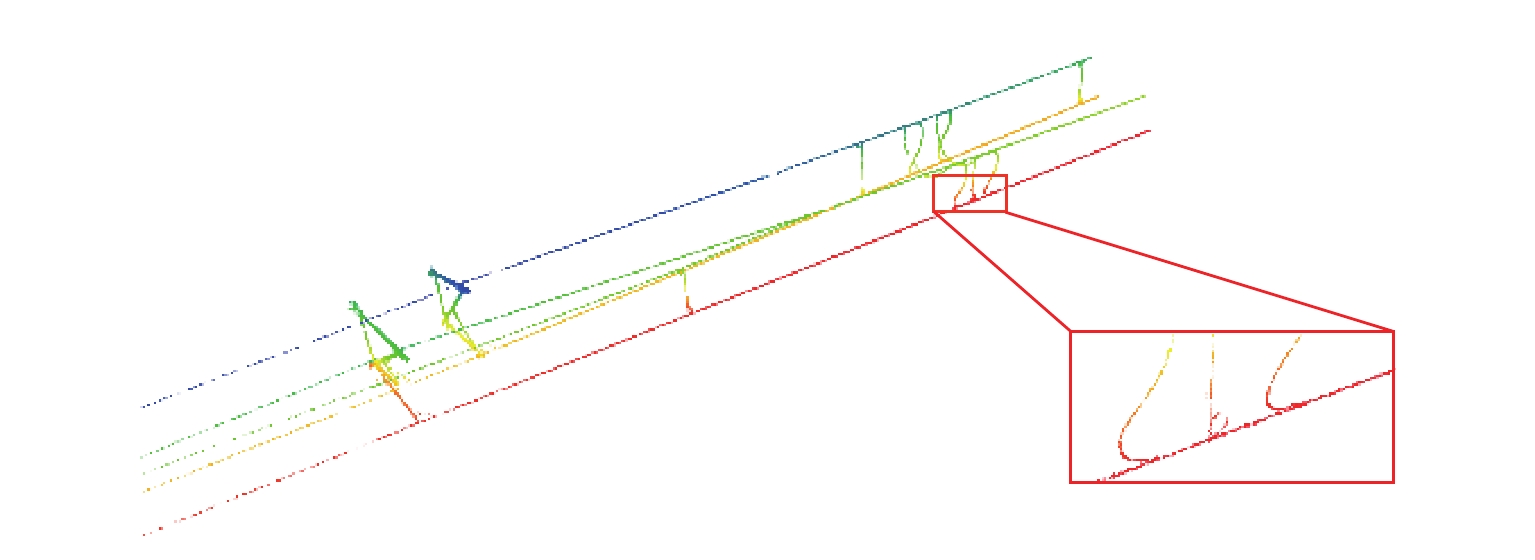
图 10 接触网导线与钢轨顶面分割结果
Figure 10. Segmentation results of overhead catenary wire and rail top surface
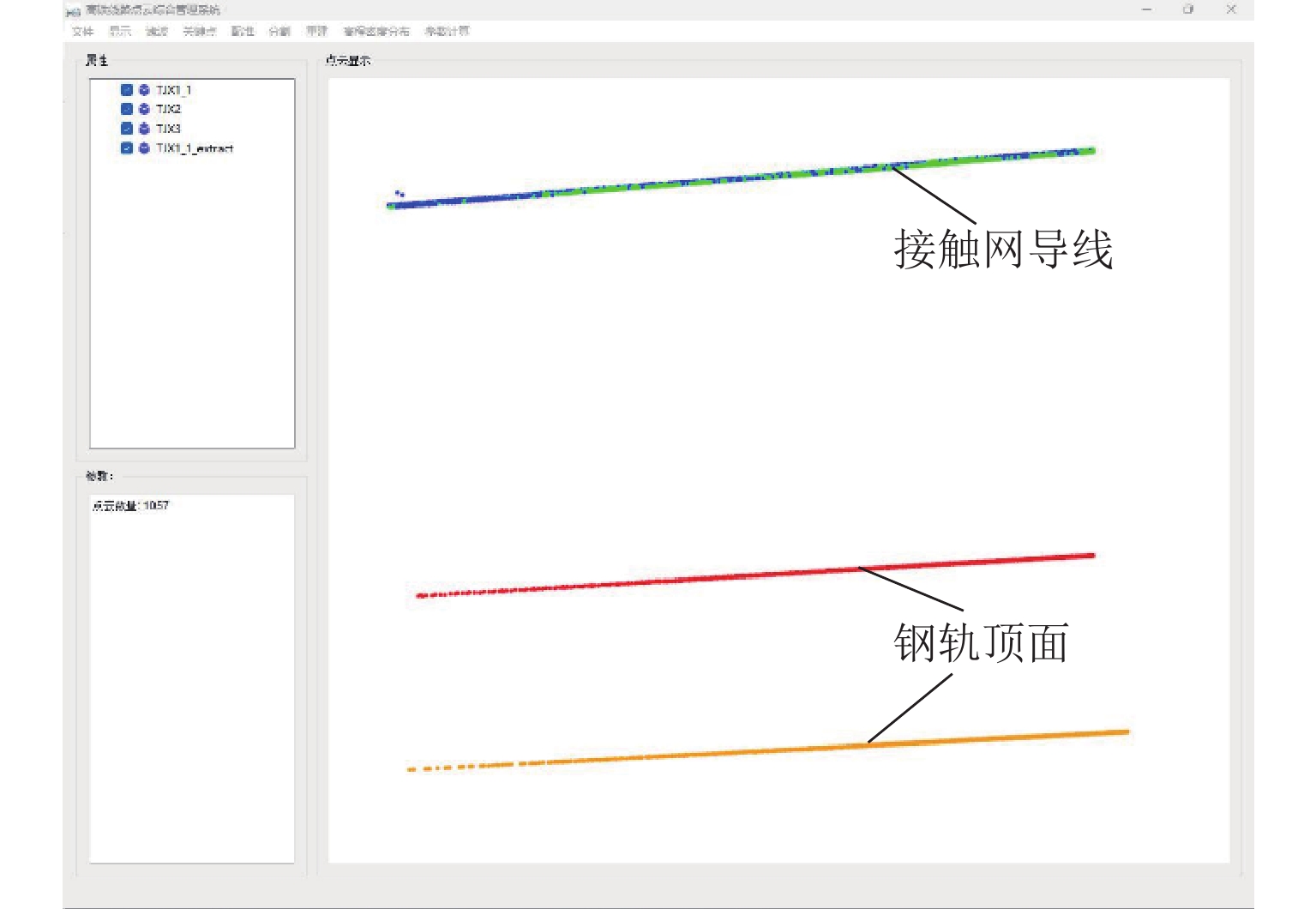
图 11 导线几何特征超限预警系统
Figure 11. Out-of-range warning system of geometrical features of wire
表 1 软硬件配置
Table 1. Hardware and software configuration
环境配置 详细信息 硬件 CPU 12th Gen Intel Core i7-12700H 内存 16 GB 显卡 NVIDIA GeForce RTX 3060 软件 系统 Windows 11 软件 PCL1.12.1、VS2019  下载: 导出CSV
下载: 导出CSV
表 2 接触网导线点云分割算法对比
Table 2. Comparison of point cloud segmentation algorithms for overhead catenary wire
方法 处理范围 耗时 鲁棒性 精确度 本文方法 长距离 最少 一般 最好 RANSAC 短距离 较多 较强 一般 3D Hough 短距离 最多 较强 最差
下载: 导出CSV
表 3 接触网导线特征提取结果
Table 3. Exaction results of overhead contact wire features
mm 组号 导高 实测
导高导高
差值拉出值 实测拉出值 拉出值差值 1 5306 5311 −5 193 199 −6 2 5300 5297 3 197 205 −8 3 5304 5310 −6 214 212 2 4 5304 5305 −1 220 218 2 5 5299 5294 5 223 223 0 6 5303 5297 6 230 231 −1 7 6449 6447 2 200 202 −2 8 6447 6450 −3 211 218 −7 9 6458 6464 −6 224 225 −1 10 6450 6456 −6 238 243 −5
下载: 导出CSV
-
[1] 中华人民共和国国务院. “十四五” 现代综合交通运输体系发展规划[EB/OL]. (2021-12-09)[2023-08-01]. https://xxgk.mot.gov.cn/2020/jigou/zhghs/202201/t20220119_3637245.html. [2] 于万聚. 高速电气化铁路接触网[M]. 成都: 西南交通大学出版社, 2003: 323-344. [3] 孔龙飞, 韩通新. 基于激光雷达的接触网动态几何参数安全监测研究[J]. 铁道机车车辆, 2019, 39(4): 86-89, 123. doi: 10.3969/j.issn.1008-7842.2019.04.19KONG Longfei, HAN Tongxin. Research on safety monitoring of dynamic geometric parameters of catenary based on laser scanning radar[J]. Railway Locomotive & Car, 2019, 39(4): 86-89, 123. doi: 10.3969/j.issn.1008-7842.2019.04.19 [4] 刘继冬, 梁茹楠, 陈交, 等. 接触网承力索集中荷载测量方法[J]. 西南交通大学学报, 2024, 59(3): 510-518. doi: 10.3969/j.issn.0258-2724.20211092LIU Jidong, LIANG Runan, CHEN Jiao, et al. Measurement method for concentrated load on catenary messenger wires[J]. Journal of Southwest Jiaotong University, 2024, 59(3): 510-518. doi: 10.3969/j.issn.0258-2724.20211092 [5] 周宁, 支兴帅, 张静, 等. 电气化铁路弓网系统摩擦磨损性能研究进展[J]. 西南交通大学学报, 2024, 59(5): 990-1005. doi: 10.3969/j.issn.0258-2724.20220053ZHOU Ning, ZHI Xingshuai, ZHANG Jing, et al. Friction and wear performance of pantograph-catenary system in electrified railways: state of the art[J]. Journal of Southwest Jiaotong University, 2024, 59(5): 990-1005. doi: 10.3969/j.issn.0258-2724.20220053 [6] DEHBI Y, HENN A, GRÖGER G, et al. Robust and fast reconstruction of complex roofs with active sampling from 3D point clouds[J]. Transactions in GIS, 2021, 25(1): 112-133. doi: 10.1111/tgis.12659 [7] TON B, AHMED F, LINSSEN J. Semantic segmentation of terrestrial laser scans of railway catenary arches: a use case perspective[J]. Sensors, 2022, 23(1): 222.1-222.14. [8] HAN F, LIANG T, REN J P, et al. Automated extraction of rail point clouds by multi-scale dimensional features from MLS data[J]. IEEE Access, 2023, 11: 32427-32436. doi: 10.1109/ACCESS.2023.3262732 [9] 梁涛, 韩峰, 陈国栋. 基于连续点云数据的既有铁路轨面信息快速提取算法设计[J]. 铁道科学与工程学报, 2021, 18(10): 2544-2551.LIANG Tao, HAN Feng, CHEN Guodong. Algorithm design for fast extraction of rail-surface information for existing railway based on continuous point cloud data[J]. Journal of Railway Science and Engineering, 2021, 18(10): 2544-2551. [10] SÁNCHEZ-RODRÍGUEZ A, SOILÁN M, CABALEIRO M, et al. Automated inspection of railway tunnels’ power line using LiDAR point clouds[J]. Remote Sensing, 2019, 11(21): 2567.1-2567.13. [11] 周靖松, 韩志伟, 杨长江. 基于三维点云的接触网几何参数检测方法[J]. 仪器仪表学报, 2018, 39(4): 239-246.ZHOU Jingsong, HAN Zhiwei, YANG Changjiang. Catenary geometric parameters detection method based on 3D point cloud[J]. Chinese Journal of Scientific Instrument, 2018, 39(4): 239-246. [12] 麻卫峰, 王成, 王金亮, 等. 激光点云输电线精细提取的残差聚类法[J]. 测绘学报, 2020, 49(7): 883-892.MA Weifeng, WANG Cheng, WANG Jinliang, et al. Extraction of power lines from laser point cloud based on residual clustering method[J]. Acta Geodaetica et Cartographica Sinica, 2020, 49(7): 883-892. [13] MA T, LONG X, FENG L, et al. Visible neighborhood graph of point clouds[J]. Graphical Models, 2012, 74(4): 184-196. doi: 10.1016/j.gmod.2012.04.007 [14] TIAN F J, JIANG Z D, JIANG G Y. DNet: dynamic neighborhood feature learning in point cloud[J]. Sensors, 2021, 21(7): 2327.1-2327.20. [15] 赵明富, 曹利波, 宋涛, 等. 三维点云配准中FPFH邻域半径自主选取算法[J]. 激光与光电子学进展, 2021, 58(6): 123-131.ZHAO Mingfu, CAO Libo, SONG Tao, et al. Independent method for selecting radius of FPFH neighborhood in 3D point cloud registration[J]. Laser & Optoelectronics Progress, 2021, 58(6): 123-131. [16] 魏双全, 房华乐, 林祥国. 先验知识引导的车载激光扫描点云道路信息提取[J]. 测绘科学, 2014, 39(10): 81-84.WEI Shuangquan, FANG Huale, LIN Xiangguo. Road information extraction from mobile laser scanning point cloud based on priori knowledge[J]. Science of Surveying and Mapping, 2014, 39(10): 81-84. [17] 方一鹏, 宋占峰, 李军. 基于TLS数据的站场线路点云提取算法[J]. 铁道科学与工程学报, 2024, 21(2): 545-554.FANG Yipeng, SONG Zhanfeng, LI Jun. Point cloud extraction algorithm based on TLS data in railway stations[J]. Journal of Railway Science and Engineering, 2024, 21(2): 545-554. [18] 朱军, 陈逸东, 张昀昊, 等. 网络环境下全景图和点云数据快速融合可视化方法[J]. 西南交通大学学报, 2022, 57(1): 18-27. doi: 10.3969/j.issn.0258-2724.20200360ZHU Jun, CHEN Yidong, ZHANG Yunhao, et al. Visualization method for fast fusion of panorama and point cloud data in network environment[J]. Journal of Southwest Jiaotong University, 2022, 57(1): 18-27. doi: 10.3969/j.issn.0258-2724.20200360 [19] CHEN X, CHEN Z, LIU G X, et al. Railway overhead contact system point cloud classification[J]. Sensors, 2021, 21(15): 4961.1-4691.22. [20] XU L, ZHENG S Y, NA J M, et al. A vehicle-borne mobile mapping system based framework for semantic segmentation and modeling on overhead catenary system using deep learning[J]. Remote Sensing, 2021, 13(23): 4939.1-4939.22. [21] 郭保青, 余祖俊, 张楠, 等. 铁路场景三维点云分割与分类识别算法[J]. 仪器仪表学报, 2017, 38(9): 2103-2111. doi: 10.3969/j.issn.0254-3087.2017.09.002GUO Baoqing, YU Zujun, ZHANG Nan, et al. 3D point cloud segmentation, classification and recognition algorithm of railway scene[J]. Chinese Journal of Scientific Instrument, 2017, 38(9): 2103-2111. doi: 10.3969/j.issn.0254-3087.2017.09.002 [22] 霍佳欣, 杨家志. 统计学滤波和引导滤波相结合的点云数据降噪[J]. 计算机应用与软件, 2023, 40(5): 248-252, 287. doi: 10.3969/j.issn.1000-386x.2023.05.037HUO Jiaxin, YANG Jiazhi. Point cloud data denoising method combining statistical filtering and guided filtering[J]. Computer Applications and Software, 2023, 40(5): 248-252, 287. doi: 10.3969/j.issn.1000-386x.2023.05.037 [23] 惠振阳, 李娜, 程朋根, 等. 基于连通性标记优化的地基LiDAR点云单木分割方法[J]. 中国激光, 2023, 50(6): 155-163.HUI Zhenyang, LI Na, CHENG Penggen, et al. Single tree segmentation method for terrestrial LiDAR point cloud based on connectivity marker optimization[J]. Chinese Journal of Lasers, 2023, 50(6): 155-163. [24] HUI Z, LI N, XIA Y, et al. Individual tree extraction from uav LIDAR point clouds based on self-adaptive mean shift segmentation[J]. ISPRS Annals of Photogrammetry, Remote Sensing and Spatial Information Sciences, 2021, 51: 25-30. [25] 国家铁路局. 铁路线路设计规范: TB 10098—2017[S]. 北京: 中国铁道出版社, 2017 [26] 国家铁路局. 铁路车站及枢纽设计规范: TB 10099—2017[S]. 北京: 中国铁道出版社, 2017. [27] 中国铁路总公司. 高速铁路接触网运行维修规则: TG/GD 124—2015[S]. 北京: 中国铁道出版社, 2015. [28] DONG Z, LIANG F X, YANG B S, et al. Registration of large-scale terrestrial laser scanner point clouds: a review and benchmark[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2020, 163: 327-342. doi: 10.1016/j.isprsjprs.2020.03.013 -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 431
- HTML全文浏览量: 341
- PDF下载量: 89
- 被引次数: 0