

Method for Stress Detection of Freeway Drivers Based on Multimodal Parameters
-
摘要:
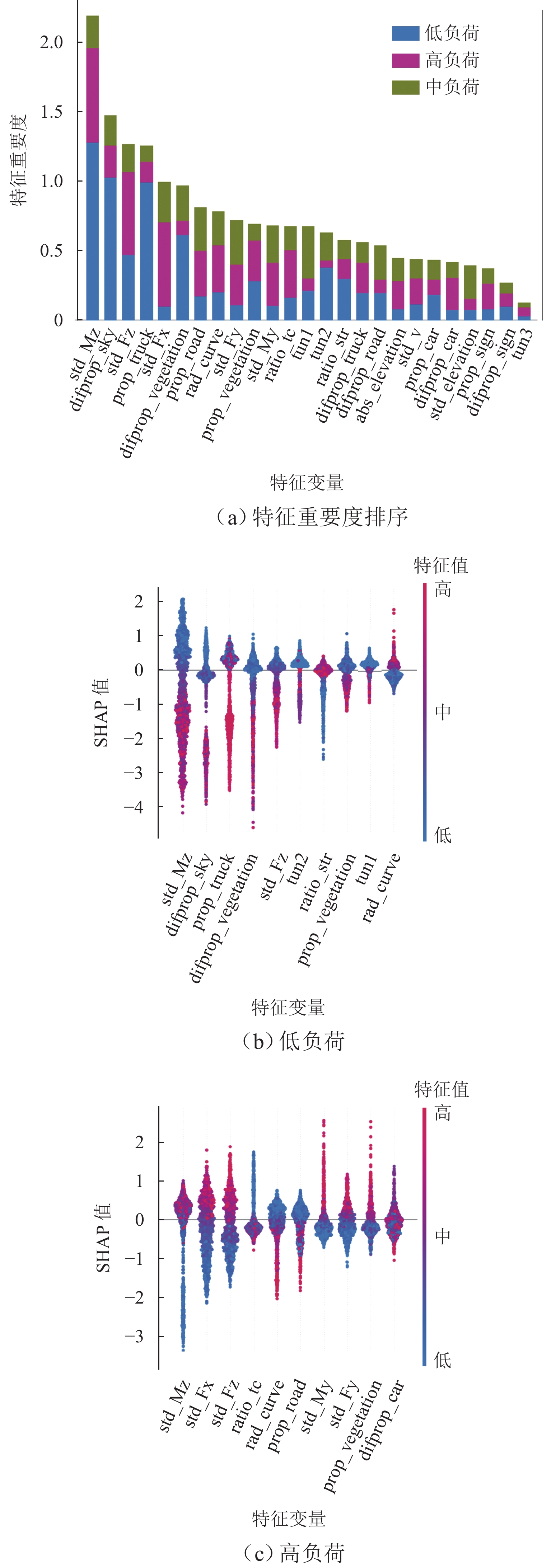
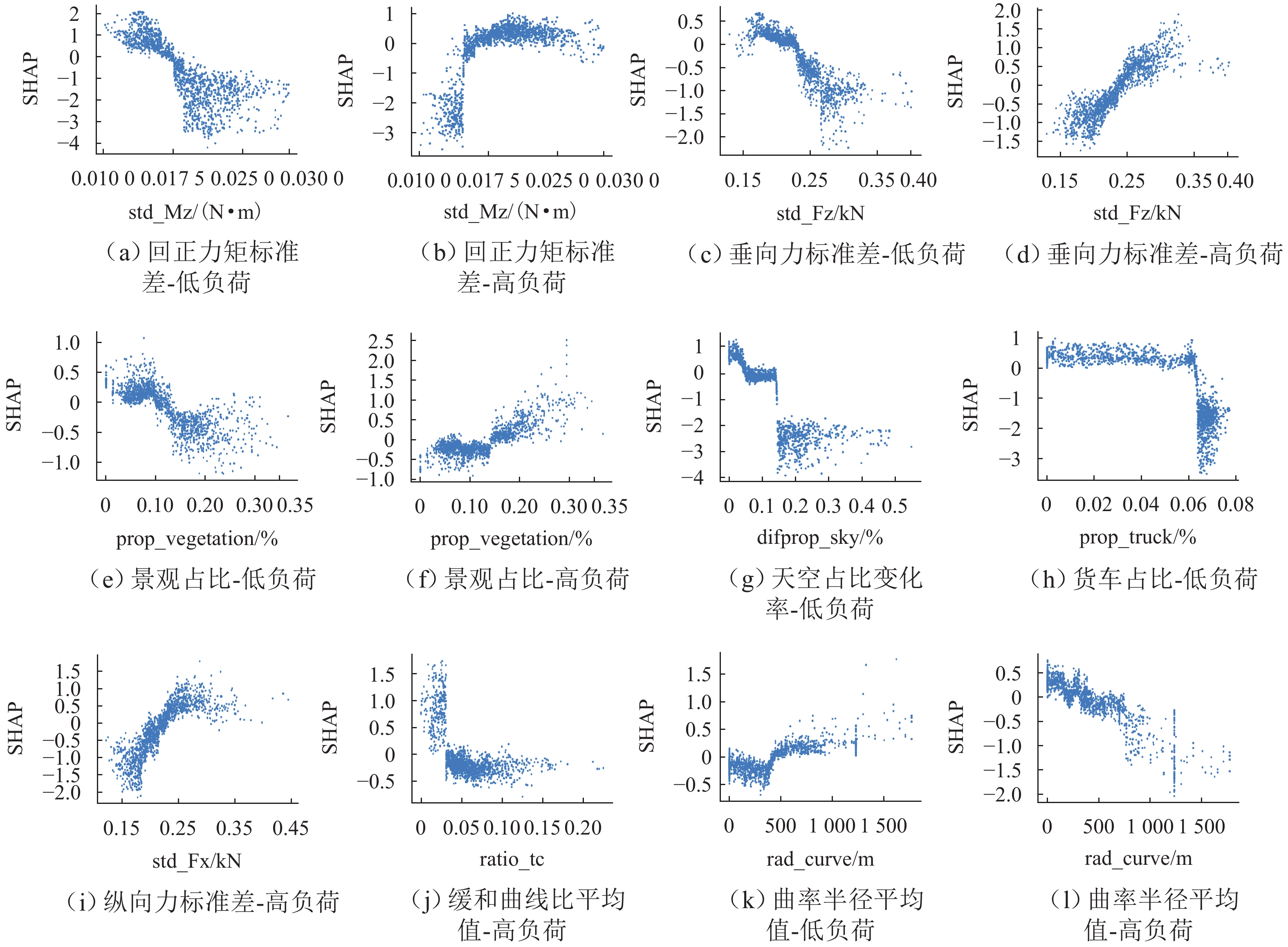
为实现不依赖生理指标的驾驶人压力负荷实时检测,本文提出一种基于道路线形参数、视频图像和轮胎六分力的检测方法. 利用计算机视觉模型Deeplabv3从行车视频中提取场景元素语义信息来表征驾驶环境,并与车辆动力学参数和道路线形参数融合,构建多模态参数特征集,借助机器学习算法实现压力负荷检测;为验证方法的有效性,在金丽温高速公路开展实车实验,采集驾驶人眼动、心率数据、车辆动力学参数、道路线形参数和驾驶场景视频;最后,利用眼动、心率数据标定压力等级,选择随机森林、支持向量机、XGBoost和LightGBM 4种算法建立压力负荷检测模型,并用SHAP (shapley additive explained)值法进行影响因素分析. 结果表明:LightGBM模型性能最优,其宏平均和加权平均F1值分别达到91.99%和93.25%,所提方法能够实现准确的压力负荷检测;当轮胎回正力矩、垂向力、纵向力标准差分别超过
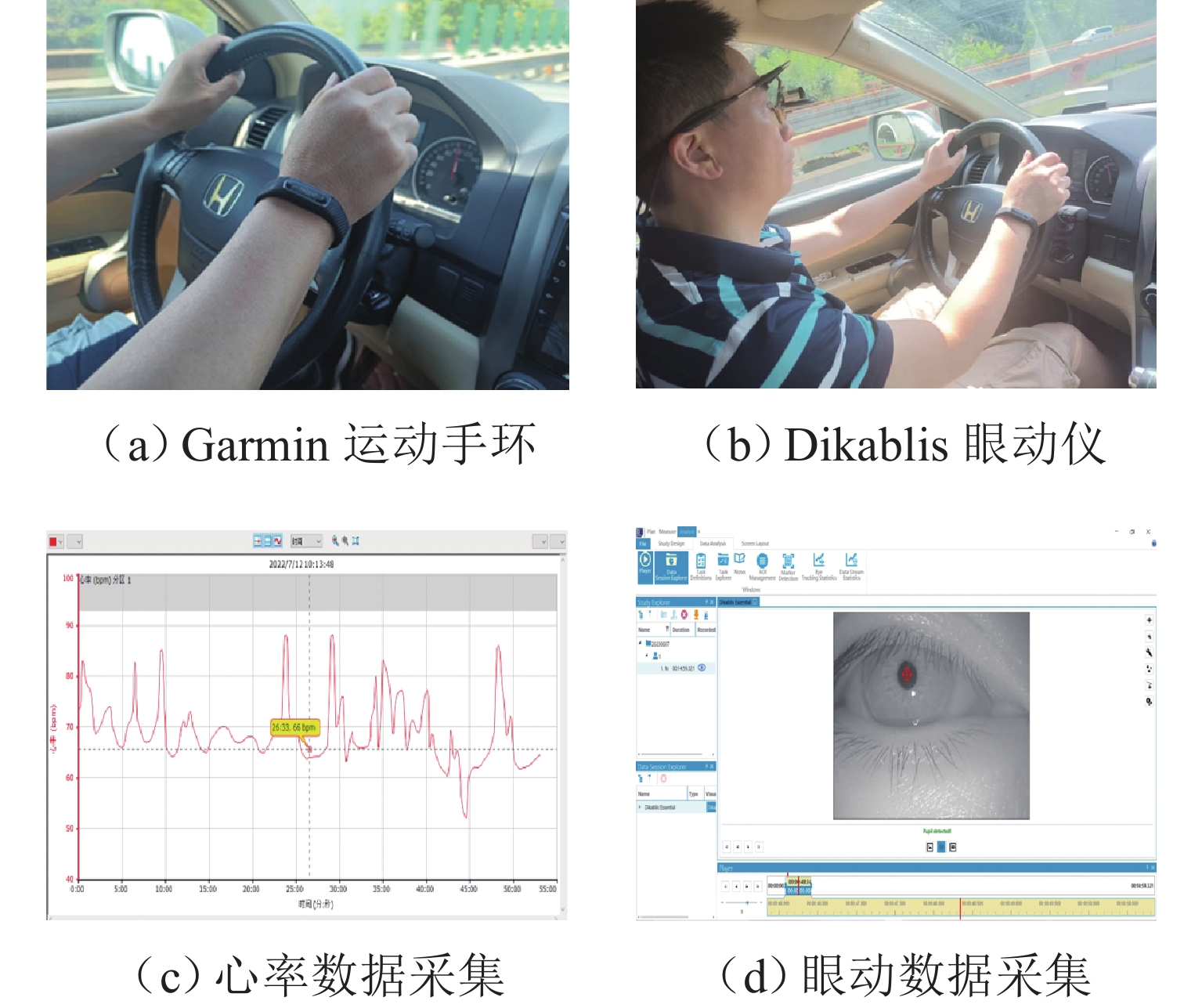
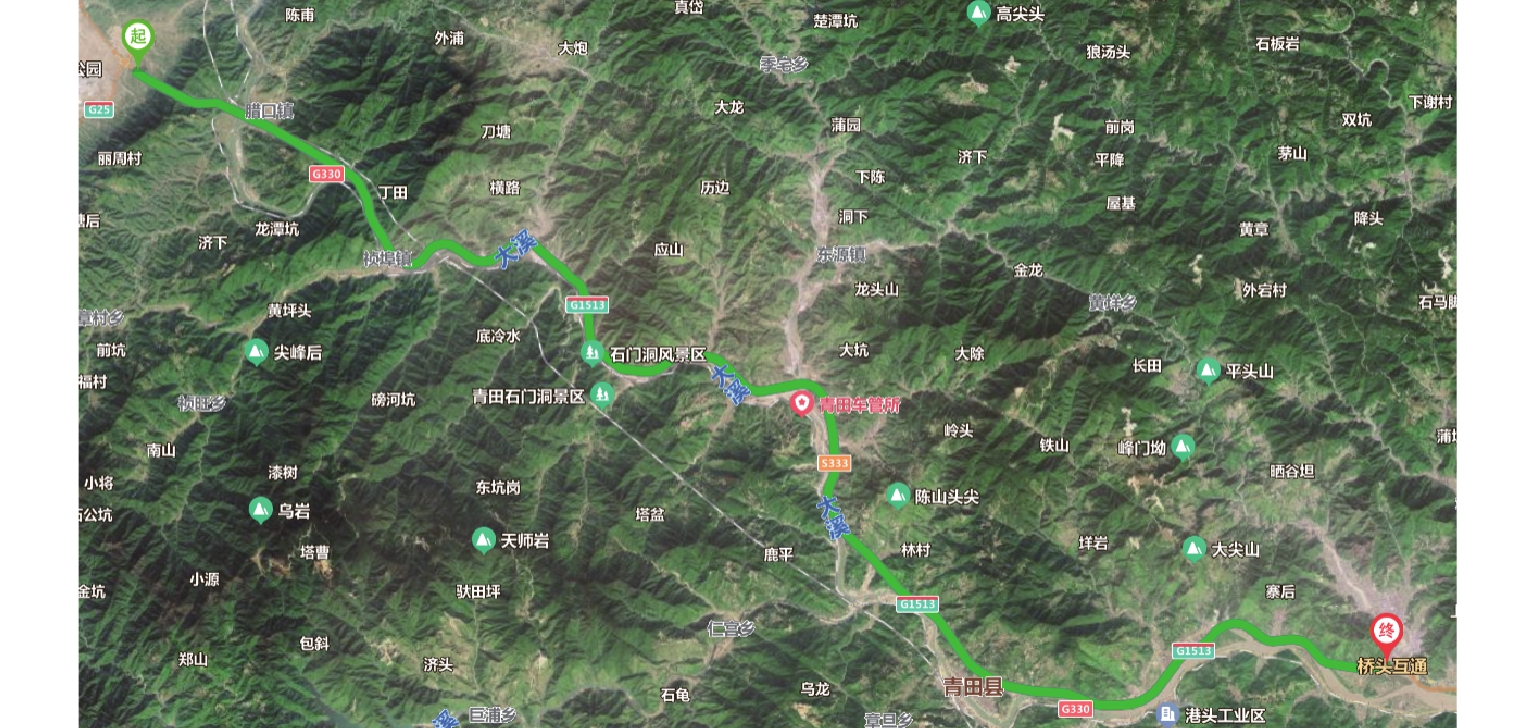
0.0163 N•m、0.237 kN和0.229 kN时,路段曲率半径平均值小于317 m,路段缓和曲线比平均值低0.0296 ;天空占比变化率、景观占比、货车占比分别超过5.89%、14.85%、6.37%时,驾驶人处于高压力状态的概率较高. 由于所需数据易于获取,本文方法具有较高的应用可行性,可为高速公路安全性、舒适性评价提供参考,同时为高速公路的景观、线形设计以及车辆驾驶人警示系统设计提供理论支持.Abstract:To enable real-time driver stress detection without relying on physiological signals, a method based on road alignment parameters, video images, and six-component tire forces was proposed. The proposed method utilized a computer vision model, namely Deeplabv3, to extract semantic information of scene elements from driving videos for characterizing the driving environment. The scene element parameters were incorporated with vehicle dynamics parameters and road alignment parameters to construct a multimodal parameter feature set. Subsequently, a machine learning algorithm was used to achieve driver stress detection. To verify the effectiveness of the proposed method, a field driving experiment was conducted on Jinliwen Freeway for collecting drivers’ eye movement, heart rate data, vehicle dynamics parameters, road alignment parameters, and driving video. The eye movement and heart rate data were utilized to measure stress levels. The random forest, support vector machine, XGBoost, and LightGBM algorithms were applied to build a stress detection model, and shapley additive explained (SHAP) was adopted to analyze influencing factors. The results show that LightGBM has the best performance, with macro average and weighted average F1 values reaching 91.99% and 93.25%, respectively, indicating that the proposed method can achieve accurate stress detection. Additionally, when the standard deviation of aligning torque, vertical force, and longitudinal force exceeds 0.016 3 N·m, 0.237 kN, and 0.229 kN, the average curvature radius of the road section is less than 317 m, and the average transition curve ratio of the road section is less than 0.029 6; the change rates of sky proportion, vegetation proportion, and truck proportion exceed 5.89%, 14.85%, and 6.37%, and the probability of the driver being in a high-stress state is higher. As the required data is easy to collect, the proposed method has a high application feasibility and can provide a reference for the evaluation of freeway safety and comfort. Moreover, it provides theoretical support for the landscape and alignment design of freeways, as well as the design of vehicle driver warning systems.
-
Key words:
- Freeway /
- driver stress /
- real-time detection /
- ensemble learning /
- semantic segmentation
-
表 1 时域分析指标
Table 1. Time-domain analysis indicators
指标 定义 SDNN/ms 相邻 R 峰间隔的标准差 RMSSD/ms 相邻 R 峰间隔差值的均方根 SDSD/ms 相邻 R 峰间隔差值的标准差  下载: 导出CSV
下载: 导出CSV
表 2 方差贡献率及因子提取结果
Table 2. Variance contribution rate and factor extraction results
变量 特征根 方差贡献率/% 累计/% 主成分 P1 2.952 42.170 42.170 主成分 P2 1.437 20.523 62.694 主成分 P3 1.255 17.924 80.618 因子 R1 2.828 40.393 40.393 因子 R2 1.438 20.545 60.938 因子 R3 1.378 19.680 80.618
下载: 导出CSV
表 3 因子载荷矩阵
Table 3. Factor loading matrix
参数 R1 R2 R3 共同度 瞳孔面积 −0.105 0.829 0.058 0.780 扫视次数 0.158 −0.172 0.791 0.732 扫视持续时间 0.032 0.107 0.844 0.794 注视持续时间 0.050 0.841 −0.109 0.721 SDNN 0.941 −0.044 0.091 0.897 RMSSD 0.983 −0.026 0.084 0.974 SDSD 0.967 −0.019 0.097 0.945
下载: 导出CSV
表 4 驾驶人压力负荷分类结果
Table 4. Classification results of driver stress
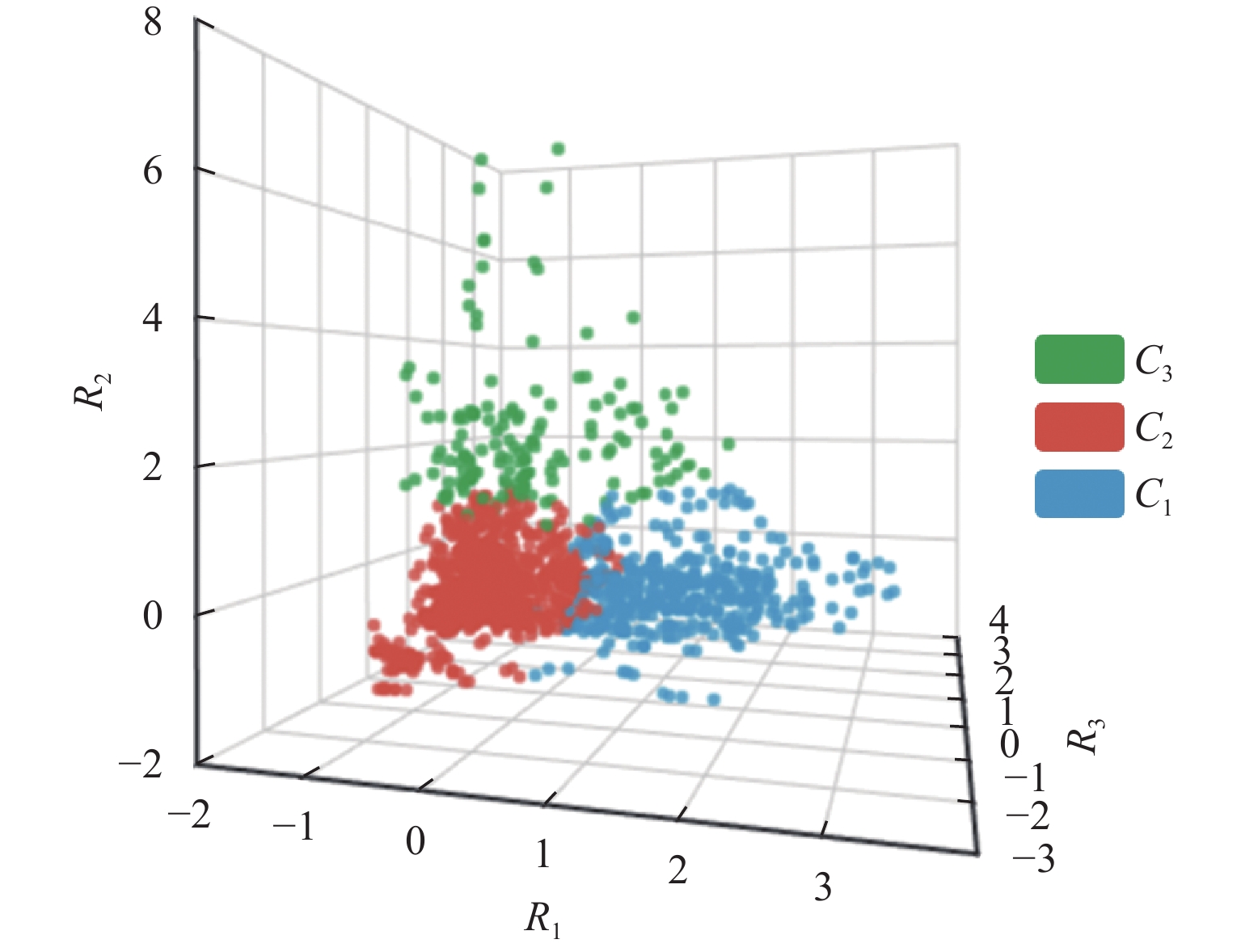
压力负荷状态 对应类别 样本数/个 占比/% 低负荷 C2 904 61.50 中负荷 C3 151 10.25 高负荷 C1 416 28.25
下载: 导出CSV
表 5 驾驶人压力负荷检测模型的特征变量
Table 5. Characteristic variables of driver stress detection model
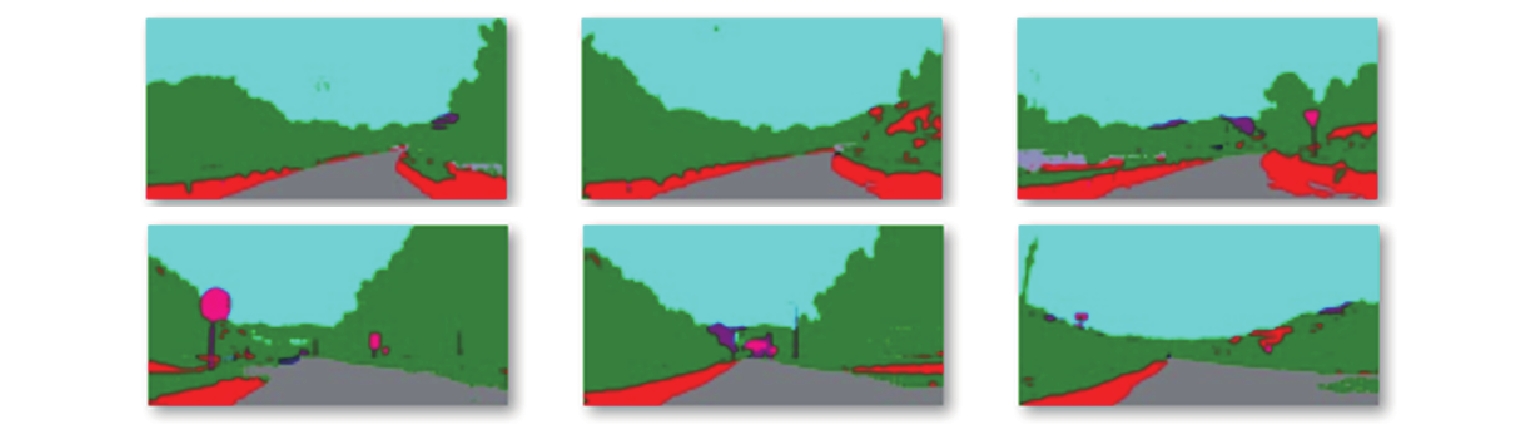
变量类别 变量描述 单位 场景元素 时间窗内每秒驾驶场景中道路(prop_road)/交通标志(prop_sign)/汽车(prop_car)/
货车(prop_truck)/景观(prop_vegetation)元素占比的平均值% 时间窗内每秒驾驶场景中天空(difprop_sky)/道路(difprop_road)/交通标志(difprop_sign)/
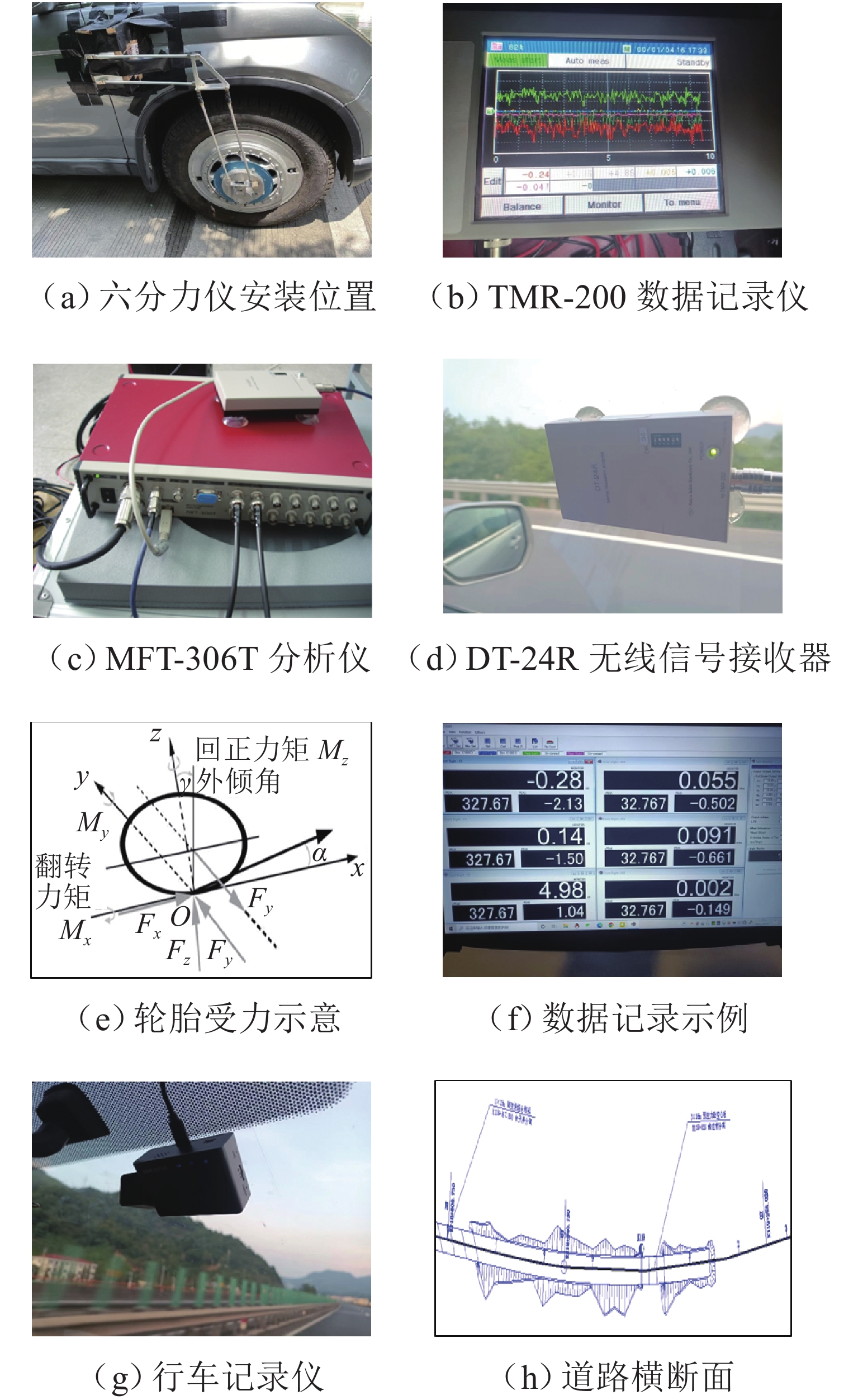
汽车(difprop_car)/货车(difprop_truck)/景观(difprop_vegetation)元素占比的累计变化率% 道路线形 时间窗内直线路段总里程占总行驶里程的比例(ratio_str) % 时间窗内路段曲率半径的平均值(rad_curve) m 时间窗内路段缓和曲线比的平均值(ratio_tc) 时间窗内百米桩号之间的高程差绝对值的总和(abs_elevation) m 时间窗内所有百米桩号高程的标准差(std_elevation) m 时间窗内路段处于接近隧道段(tun1)/隧道出口段(tun2)/隧道群(tun3)位置的里程占总里程的比例 % 车辆状态 时间窗内轮胎所受纵向力(std_Fx)/侧向力(std_Fy)/垂向力(std_Fz)的标准差 kN 时间窗内轮胎所受滚动力矩(std_My)/回正力矩(std_Mz)的标准差 N•m 时间窗内车辆行驶速度的标准差(std_v) km/h
下载: 导出CSV
表 6 模型超参数寻优结果
Table 6. Results of model hyperparameter optimization
模型 超参数及寻优范围 寻优结果 原始训练集 平衡训练集 RF 决策树数量Tn∈{200,250,300,350,400},最大树深Td∈{5,10,15},
单棵树可用特征上限Tf∈{5,10,15}Tn=350,Td=10,
Tf=15Tn=300,Td=10,
Tf=10SVM 正则化参数C∈{0.1,1,10,100},核函数系数G∈{0.1,1,10,100},
核函数类型K∈{线性核,多项式核,径向基核}C=10,G=10,
K=线性核C=10,G=10,
K=线性核XGBoost 学习率L∈{0.01,0.05,0.1,0.2},最大树深Td∈{5,10,15},
决策树数量Tn∈{200,250,300,350,400}L=0.01,Td=10,
Tn=400L=0.01,Td=15,
Tn=300LightGBM 学习率L∈{0.01,0.05,0.1,0.2},最大树深Td∈{5,10,15},
决策树数量Tn∈{200,250,300,350,400}L=0.01,Td=10,
Tn=300L=0.01,Td=15,
Tn=200
下载: 导出CSV
表 7 模型检测性能评价
Table 7. Evaluation of model detection performance
指标 负荷 原始训练集模型/% 平衡训练集模型/% 性能指标变化幅度/% RF SVM XGB Light-
GBMRF SVM XGB Light-
GBMRF SVM XGB Light-
GBM精确率 低负荷 85.20 90.75 93.26 90.61 87.96 91.06 94.97 96.02 2.76 0.31 1.71 5.41 中负荷 82.76 56.10 85.71 85.71 86.21 74.19 93.10 90.32 3.45 18.09 7.39 4.61 高负荷 81.43 80.25 86.05 83.72 82.67 81.40 89.66 88.64 1.24 1.15 3.61 4.92 宏平均 83.13 75.70 88.34 86.68 85.61 82.22 92.58 91.66 2.48 6.52 4.24 4.98 加权平均 83.87 84.12 90.46 88.13 86.27 86.52 93.26 93.32 2.40 2.40 2.80 5.19 召回率 低负荷 92.78 87.22 92.22 91.11 93.33 90.56 94.44 93.89 0.55 3.34 2.22 2.78 中负荷 77.42 74.19 85.71 77.42 80.65 74.19 87.10 90.32 3.23 0.00 1.39 12.90 高负荷 67.86 77.38 88.10 85.71 73.81 82.35 92.86 92.86 5.95 4.97 4.76 7.15 宏平均 79.35 79.60 88.68 84.75 82.60 82.37 91.47 92.36 3.25 2.77 2.79 7.61 加权平均 84.07 83.05 90.41 88.14 86.44 86.49 93.22 93.22 2.37 3.44 2.81 5.08 F1 值 低负荷 88.83 88.95 92.74 90.86 90.57 90.81 94.71 94.94 1.74 1.86 1.97 4.08 中负荷 80.00 63.89 85.71 81.36 83.33 74.19 90.00 90.32 3.33 10.30 4.29 8.96 高负荷 74.03 78.79 87.06 84.71 77.99 81.87 91.23 90.70 3.96 3.08 4.17 5.99 宏平均 80.95 77.21 88.50 85.64 83.96 82.29 91.98 91.99 3.01 5.08 3.48 6.35 加权平均 83.69 83.42 90.43 88.11 86.22 86.50 93.22 93.25 2.53 3.08 2.79 5.14
下载: 导出CSV
-
[1] 中华人民共和国国家统计局. 中国统计年鉴[M]. 北京: 中国统计出版社, 2024. [2] KHATTAK A J, AHMAD N, WALI B, et al. A taxonomy of driving errors and violations: evidence from the naturalistic driving study[J]. Accident Analysis & Prevention, 2021, 151: 105873.1-105873.20. [3] WANG J J, XU W, GONG Y H. Real-time driving danger-level prediction[J]. Engineering Applications of Artificial Intelligence, 2010, 23(8): 1247-1254. doi: 10.1016/j.engappai.2010.01.001 [4] USECHE S A, ORTIZ V G, CENDALES B E. Stress-related psychosocial factors at work, fatigue, and risky driving behavior in bus rapid transport (BRT) drivers[J]. Accident Analysis & Prevention, 2017, 104: 106-114. [5] HEALEY J A, PICARD R W. Detecting stress during real-world driving tasks using physiological sensors[J]. IEEE Transactions on Intelligent Transportation Systems, 2005, 6(2): 156-166. doi: 10.1109/TITS.2005.848368 [6] 胡月琦. 高速公路隧道路段驾驶人心智游移及心理负荷与安全风险研究[D]. 西安: 长安大学, 2021. [7] AGRAWAL S, PEETA S. Evaluating the impacts of situational awareness and mental stress on takeover performance under conditional automation[J]. Transportation Research Part F: Traffic Psychology and Behaviour, 2021, 83: 210-225. doi: 10.1016/j.trf.2021.10.002 [8] HUANG J, LIU Y, PENG X Y. Recognition of driver’s mental workload based on physiological signals, a comparative study[J]. Biomedical Signal Processing and Control, 2022, 71: 103094.1-103094.9. [9] URBANO M, ALAM M, FERREIRA J, et al. Cooperative driver stress sensing integration with eCall system for improved road safety[C]//IEEE EUROCON 2017-17th International Conference on Smart Technologies. Ohrid: IEEE, 2017: 883-888. [10] 黄晶, 杨梦婷. 考虑初始情绪的个性化驾驶负荷状态评价[J]. 中国公路学报, 2021, 34(1): 167-176.HUANG Jing, YANG Mengting. Initial emotion-based evaluation of the personalized driving load state[J]. China Journal of Highway and Transport, 2021, 34(1): 167-176. [11] TAVAKOLI A, HEYDARIAN A. Multimodal driver state modeling through unsupervised learning[J]. Accident Analysis & Prevention, 2022, 170: 106640.1-106640.17 [12] CHEN L L, ZHAO Y, YE P F, et al. Detecting driving stress in physiological signals based on multimodal feature analysis and kernel classifiers[J]. Expert Systems with Applications, 2017, 85: 279-291. doi: 10.1016/j.eswa.2017.01.040 [13] LEHTONEN E, LAPPI O, SUMMALA H. Anticipatory eye movements when approaching a curve on a rural road depend on working memory load[J]. Transportation Research Part F: Traffic Psychology and Behaviour, 2012, 15(3): 369-377. doi: 10.1016/j.trf.2011.08.007 [14] LAZARO M J, YUN M H, KIM S. Stress-level and attentional functions of experienced and novice young adult drivers in intersection-related hazard situations[J]. International Journal of Industrial Ergonomics, 2022, 90: 103315.1-103315.9. doi: 10.1016/j.ergon.2022.103315 [15] 赵亮. 农村公路复杂条件下驾驶人典型生理心理指标变化规律及驾驶行为研究[D]. 西安: 长安大学, 2018. [16] RASTGOO M N, NAKISA B, MAIRE F, et al. Automatic driver stress level classification using multimodal deep learning[J]. Expert Systems with Applications, 2019, 138: 112793.1-112793.11. [17] MOU L T, ZHOU C, ZHAO P F, et al. Driver stress detection via multimodal fusion using attention-based CNN-LSTM[J]. Expert Systems with Applications, 2021, 173: 114693.1-114693.11. [18] 符锌砂, 葛洪成, 鲁岳. 基于LightGBM的高速公路隧道段驾驶人压力负荷评估[J]. 交通运输研究, 2022, 8(5): 46-55.FU Xinsha, GE Hongcheng, LU Yue. Driver stress load assessment of freeway tunnel sections based on LightGBM[J]. Transport Research, 2022, 8(5): 46-55. [19] LANATA A, VALENZA G, GRECO A, et al. How the autonomic nervous system and driving style change with incremental stressing conditions during simulated driving[J]. IEEE Transactions on Intelligent Transportation Systems, 16(3): 1505-1517. [20] ELAMRANI ABOU ELASSAD Z, MOUSANNIF H, AL MOATASSIME H. A real-time crash prediction fusion framework: an imbalance-aware strategy for collision avoidance systems[J]. Transportation Research Part C: Emerging Technologies, 2020, 118: 102708.1-102708.24. [21] DI STASI L L, RENNER R, Catena A, et al. Towards a driver fatigue test based on the saccadic main sequence: a partial validation by subjective report data[J]. Transportation Research Part C: Emerging Technologies, 2012, 21(1): 122-133. doi: 10.1016/j.trc.2011.07.002 [22] ESKANDARIAN A, MORTAZAVI A. Evaluation of a smart algorithm for commercial vehicle driver drowsiness detection[C]//2007 IEEE Intelligent Vehicles Symposium. Turkey: IEEE, 2007: 553-559. [23] ZHANG C J, HE J, YAN X T, et al. Exploring relationships between microscopic kinetic parameters of tires under normal driving conditions, road characteristics and accident types[J]. Journal of Safety Research, 2021, 78: 80-95. doi: 10.1016/j.jsr.2021.05.010 [24] SANG F, LUO R, CHEN Y, et al. Factor analysis evaluation of asphalt pavement performance considering structural strength and hidden cracks[J]. Construction and Building Materials, 2023, 408: 133651.1-133651.12. [25] WOOD J M. Vision impairment and on-road driving[J]. Annual Review of Vision Science, 2022, 8: 195-216. doi: 10.1146/annurev-vision-100820-085030 [26] KIM B, YIM J, KIM J. Highway driving dataset for semantic video segmentation[C]//British Machine Vision Conference. Newcastle: British Machine Vision Association, 2018: 52286240.1-52286240.12. [27] LUNDBERG S M, LEE S I. A unified approach to interpreting model predictions[C]//The 31st Conference on Neural Information Processing Systems. California: Curran Associates Inc, 2017: 4768–4777. [28] SACHS H K. On the influence of weight reduction and weight distribution on vehicle handling, ride and performance[J]. Vehicle System Dynamics, 1974, 3(3): 163-191. doi: 10.1080/00423117408968454 [29] 许金良, 王荣华, 冯志慧, 等. 基于动视觉特性的高速公路景观敏感区划分[J]. 交通运输工程学报, 2015, 15(2): 1-9.XU Jinliang, WANG Ronghua, FENG Zhihui, et al. Classification of expressway landscape sensitive zone based on dynamic visual characteristics[J]. Journal of Traffic and Transportation Engineering, 2015, 15(2): 1-9. [30] 孔德文. 大型车辆对多车道高速公路交通运行影响研究[D]. 南京: 东南大学, 2018. [31] 徐婷, 邓恺龙, 刘永涛, 等. 基于航测数据的不同风格换道轨迹规划[J]. 西南交通大学学报, 2024, 59(3): 720-728.XU Ting, DENG Kailong, LIU Yongtao, et al. Different styles of lane changing trajectory planning based on aerial survey data[J]. Journal of Southwest Jiaotong University, 2024, 59(3): 720-728. -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 320
- HTML全文浏览量: 101
- PDF下载量: 55
- 被引次数: 0