

Detection of Air Gap Defects in Cable Terminals of Electric Multiple Units Based on Electric Field Characteristics
-
摘要:
针对动车组电缆终端绝缘现有检测手段复杂,易受到现场噪声干扰,检测效率不高的问题,提出一种基于电场强度的电缆终端绝缘状态检测新方法. 首先,制备不同长度的预制气隙缺陷动车组电缆终端;其次,获取预制气隙缺陷电缆终端样本的高频脉冲电流信号;最后,利用电场传感器测量不同缺陷长度的电缆终端电场强度值. 研究结果表明:通过缺陷电缆终端高频脉冲电流峰值信号以及电场强度特征,可将电缆终端缺陷发展划分为
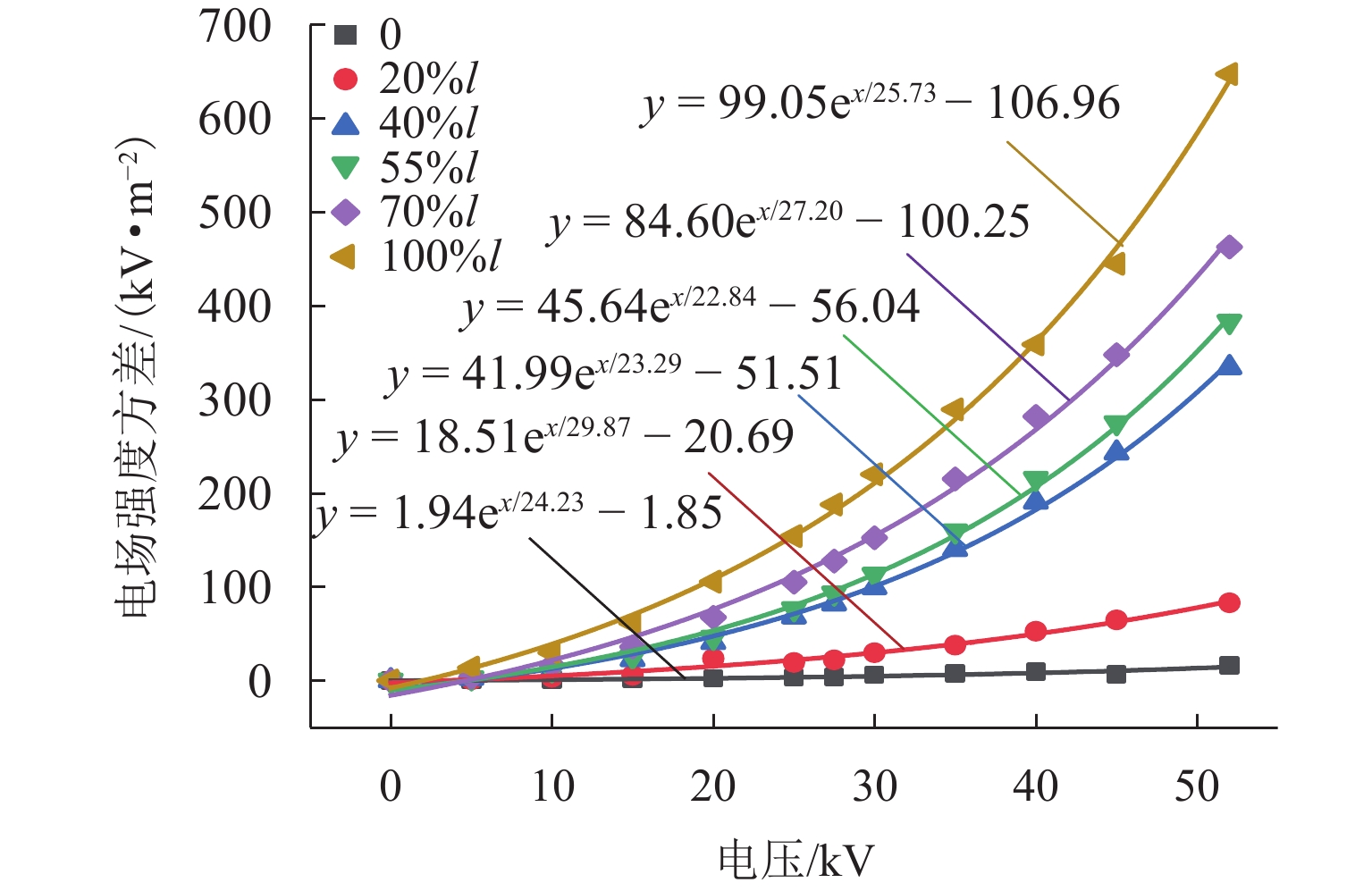
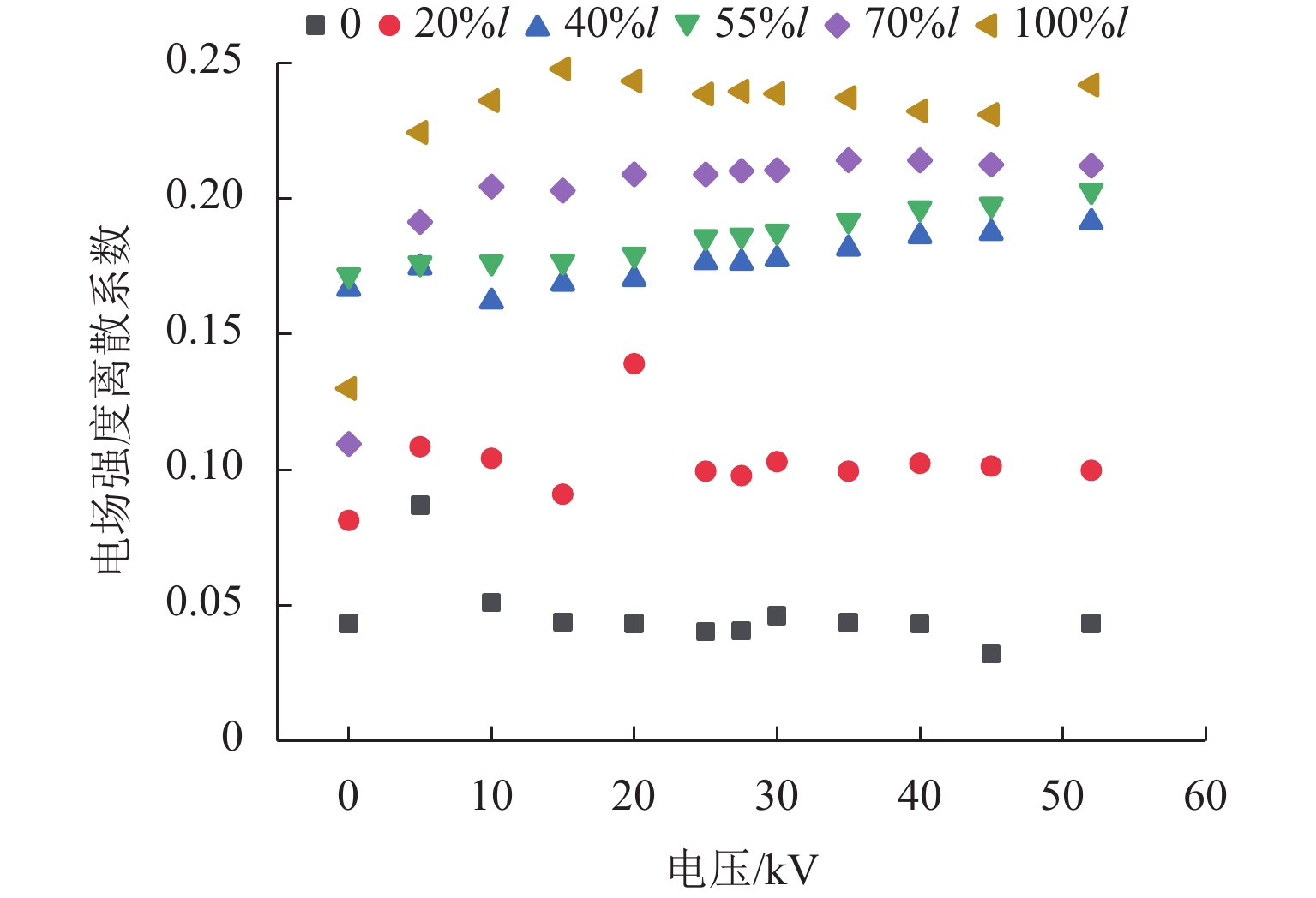
S 1、S 2、S 3 3个阶段;缺陷越大,电缆终端沿面电场强度四分位差、平均值、方差和离散系数越大,当界面缺陷由20%l 增加到100%l (l 为高压电缆终端内部第1层应控管长度)时,电场强度四分位差斜率由0.126增加到0.671,电场强度方差指前因子和偏移量绝对值分别增加约81.30%和80.66%.-
关键词:
- 动车组 /
- 电缆终端 /
- 高频脉冲电流(HFCT) /
- 检测 /
- 电场强度
Abstract:The existing detection methods for the insulation of cable terminals of electric multiple units (EMUs) are complex and susceptible to onsite noise interference, and they thus have low detection efficiency. Therefore, a novel method for detecting the insulation condition of cable terminals based on electric field intensity was proposed. Firstly, cable terminals of EMUs with prefabricated air gap defects of different lengths were prepared. Secondly, high frequency current transform (HFCT) signals of the prefabricated air gap defects in the cable terminal samples were obtained. Finally, electric field intensity values of cable terminals with different defect lengths were measured by using electric field sensors. The research results show that by analyzing the peak value of HFCT signals and the electric field intensity characteristics of cable terminals with defects, the development of defects in cable terminals can be divided into three stages:
S 1,S 2, andS 3. As the defect size increases, the interquartile range, mean value, variance, and coefficient of variation of the electric field intensity along the surface of the cable terminals increase. When the interface defect increases from 20%l to 100%l (l refers to the length of the stress control tube in the first layer inside the high-voltage cable terminal), the slope of the interquartile range of electric field intensity increases from 0.126 to 0.671, and the variance of electric field intensity increases by approximately 81.30% for the pre-exponential factor and 80.66% for the absolute value of the offset. -
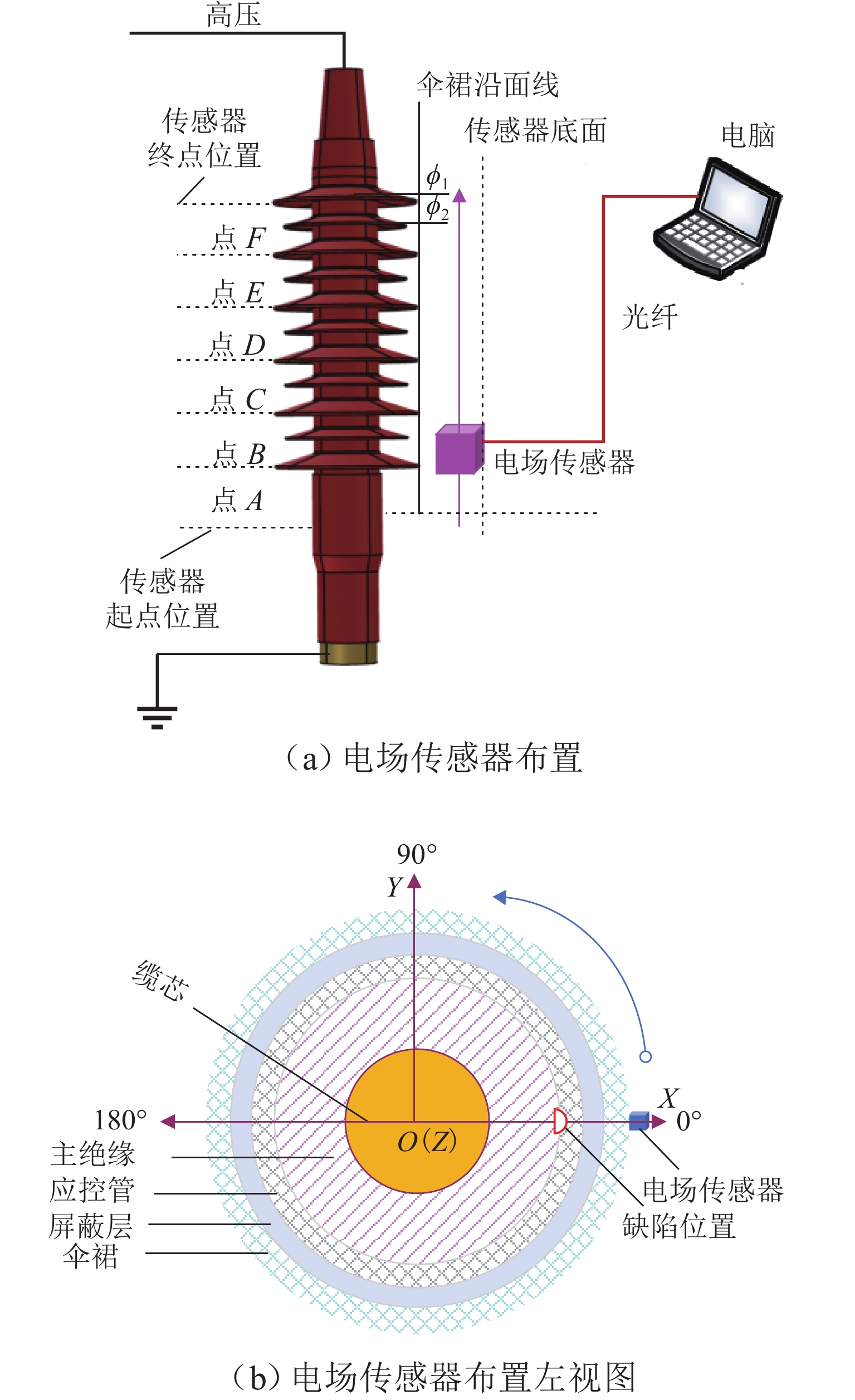
图 3 电缆终端沿面场强测试示意
Figure 3. Testing of electric field intensity along surface of cable terminal
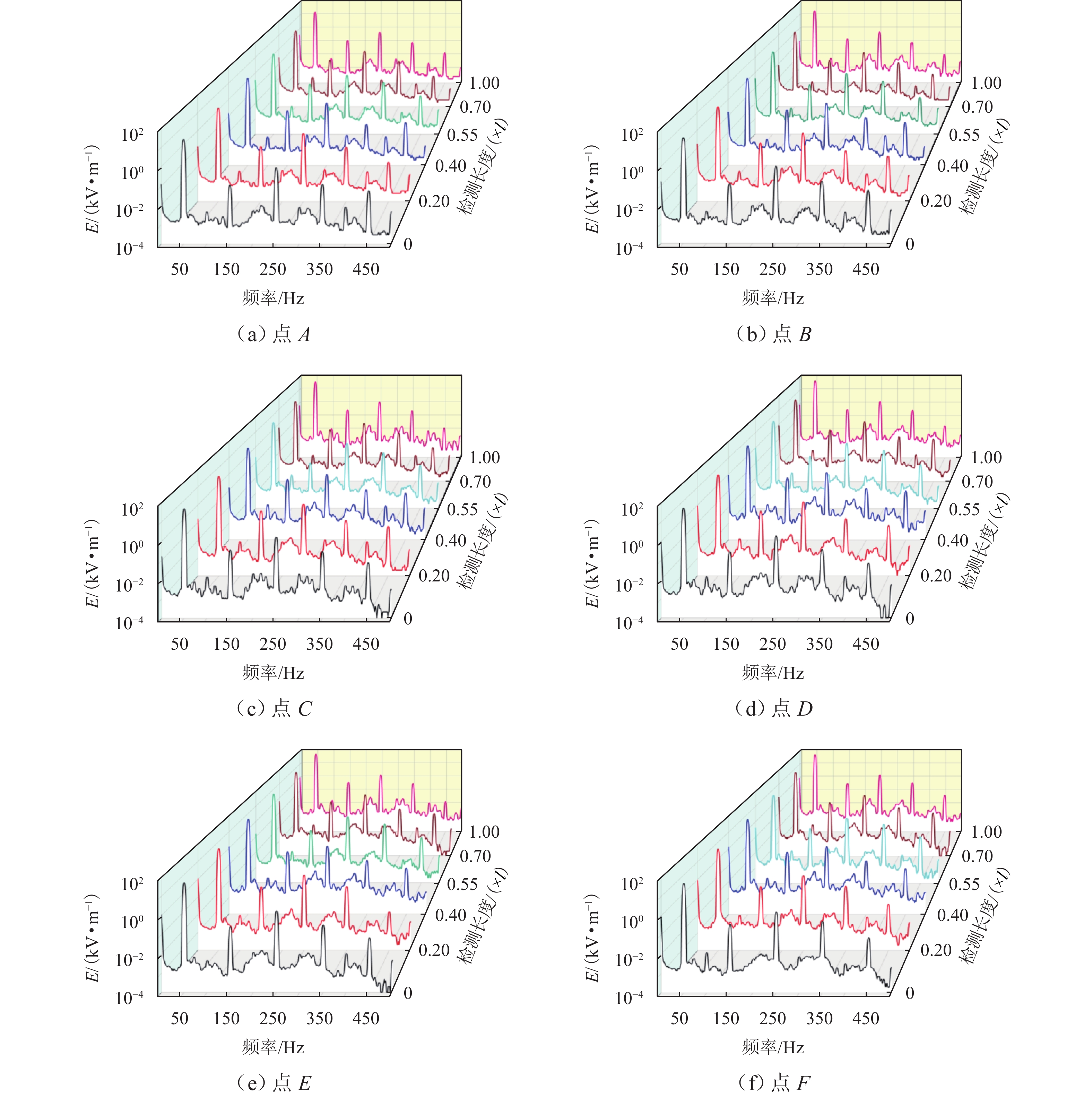
图 5 缺陷电缆终端在不同频率下电场强度分布
Figure 5. Electric field intensity distribution of cable terminals with defects at different frequencies

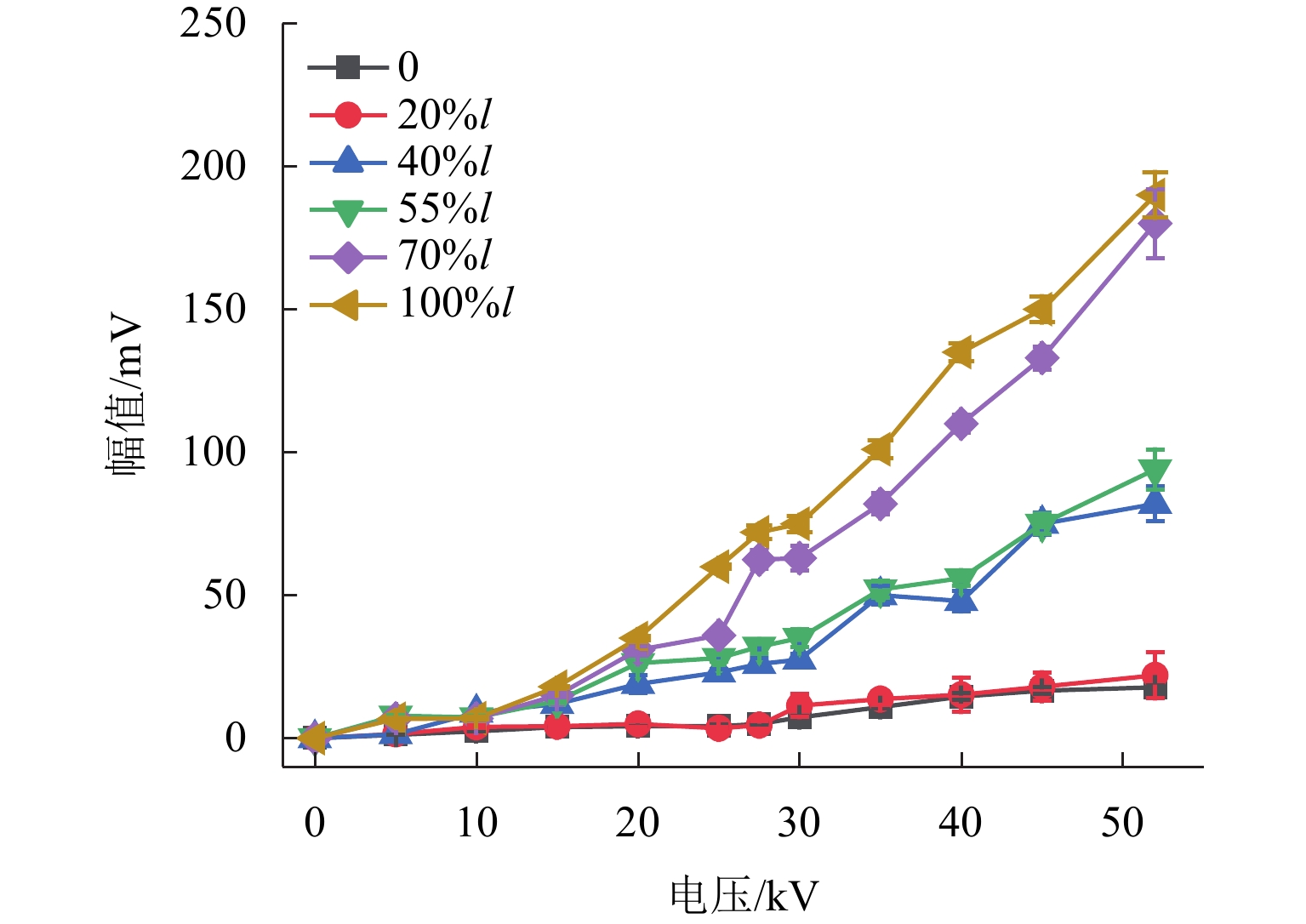
图 6 不同电压等级下缺陷电缆终端电场强度统计
Figure 6. Electric field intensity statistics of cable terminals with defects under different voltage levels
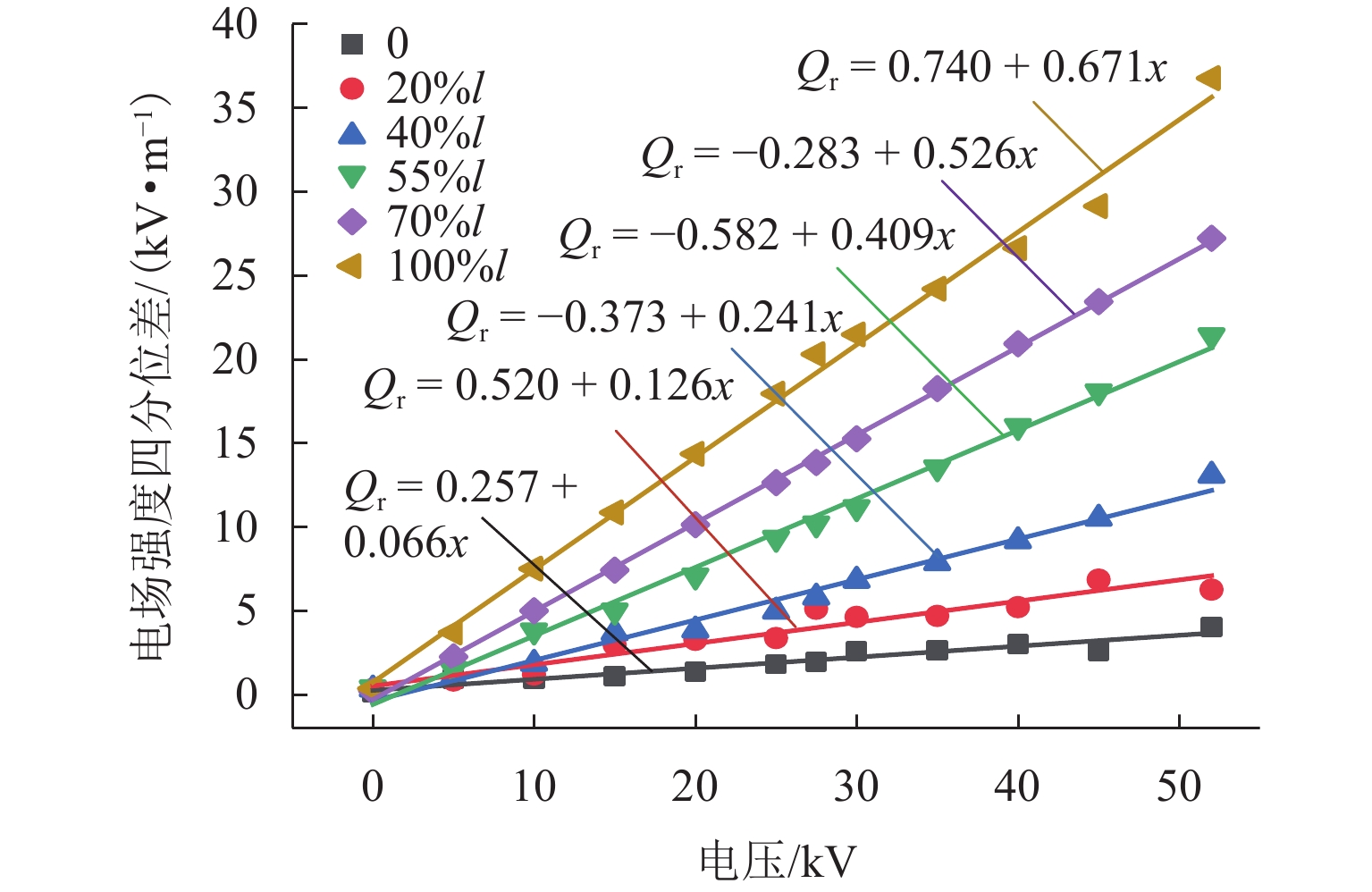
图 7 电场强度四分位差统计
Figure 7. Statistics of interquartile range of electric field intensity
-
[1] GUO L, CAO W D, BAI L L, et al. Fault diagnosis based on multiscale texture features of cable terminal on EMU of high-speed railway[J]. IEEE Transactions on Instrumentation and Measurement, 2021, 70(99): 3502612.1-3502612.12. [2] 郭蕾, 曹伟东, 白龙雷, 等. 乙丙橡胶电缆终端气隙局部放电过程及特征提取[J]. 西南交通大学学报, 2021, 56(5): 1011-1019, 1028.GUO Lei, CAO Weidong, BAI Longlei, et al. Partial discharge process and feature extraction of air gap in EPR cable terminal[J]. Journal of Southwest Jiaotong University, 2021, 56(5): 1011-1019, 1028. [3] MAZZANTI G, MARZINOTTO M. Advanced electro-thermal life and reliability model for high voltage cable systems including accessories[J]. IEEE Electrical Insulation Magazine, 2017, 33(3): 17-25. doi: 10.1109/MEI.2017.7906159 [4] TANG Y J, GAO G Q, LIU K, et al. Electric field distribution and performance optimization of high-speed train cable terminal with internal defects[J]. Engineering Failure Analysis, 2023, 151: 107360.1-107360.16. doi: 10.1016/j.engfailanal.2023.107360 [5] CHEN M W, LI Q Z, ROBERTS C, et al. Modelling and performance analysis of advanced combined co-phase traction power supply system in electrified railway[J]. IET Generation, Transmission & Distribution, 2016, 10(4): 906-916. [6] 周凯, 吴广宁, 邓桃, 等. PWM脉冲电压下电磁线绝缘老化机理分析[J]. 中国电机工程学报, 2007, 27(24): 24-29. doi: 10.3321/j.issn:0258-8013.2007.24.005ZHOU Kai, WU Guangning, DENG Tao, et. al. Study on insulation aging properties of magnet wire under PWM voltages[J]. Proceedings of the CSEE, 2007, 27(24): 24-29. doi: 10.3321/j.issn:0258-8013.2007.24.005 [7] 解绍锋, 孙镜堤, 骆冰祥, 等. 高速铁路对邻近普速铁路电力电缆的干扰机理[J]. 西南交通大学学报, 2021, 56(1): 206-213.XIE Shaofeng, SUN Jingdi, LUO Bingxiang, et al. Mechanism of high-speed railway interference on power cables of adjacent normal-speed railway[J]. Journal of Southwest Jiaotong University, 2021, 56(1): 206-213. [8] 孙传铭, 刘凯, 张鹏鹏, 等. 车载电缆终端应控管热老化特性及对绝缘性能的影响[J]. 西南交通大学学报, 2024, 59(06): 1275-1284.SUN Chuanming, LIU Kai, ZHANG Pengpeng, et al. Thermal aging characteristics of vehicle-mounted cable terminal and its influence on insulation performance should be controlled[J]. Journal of Southwest Jiaotong University, 2024, 59(06): 1275-1284. [9] 周凯, 赵庆杰, 吴科, 等. 牵引机车中的高频谐波对电缆终端热点的影响[J]. 高电压技术, 2016, 42(11): 3601-3606.ZHOU Kai, ZHAO Qingjie, WU Ke, et al. Effect of high frequency harmonics in traction locomotives on hot-spot of cable terminations[J]. High Voltage Engineering, 2016, 42(11): 3601-3606. [10] GUO L, CAO W D, BAI L L, et al. Fault diagnosis based on multiscale texture features of cable terminal on EMU of high-speed railway[J]. IEEE Transactions on Instrumentation and Measurement, 2020, 70: 3502612.1-3502612.12. [11] ÁLVAREZ F, GARNACHO F, ORTEGO J, et al. Application of HFCT and UHF sensors in on-line partial discharge measurements for insulation diagnosis of high voltage equipment[J]. Sensors, 2015, 15(4): 7360-7387. doi: 10.3390/s150407360 [12] 周凯, 李旭涛, 黄友聪, 等. 高频谐波电场下电缆终端过热点的形成机理[J]. 西南交通大学学报, 2012, 47(4): 646-651. doi: 10.3969/j.issn.0258-2724.2012.04.018ZHOU Kai, LI Xutao, HUANG Youcong, et al. Formation mechanism of hot spot in stress control cable terminations under harmonic voltages[J]. Journal of Southwest Jiaotong University, 2012, 47(4): 646-651. doi: 10.3969/j.issn.0258-2724.2012.04.018 [13] TIAN Y, LEWIN P L, DAVIES A E. Comparison of on-line partial discharge detection methods for HV cable joints[J]. IEEE Transactions on Dielectrics and Electrical Insulation, 2002, 9(4): 604-615. [14] 曹俊平, 王少华, 任广振, 等. 高压电缆附件铅封涡流探伤方法试验验证及应用[J]. 高电压技术, 2018, 44(11): 3720-3726.CAO Junping, WANG Shaohua, REN Guangzhen, et al. Verification and application of lead sealing eddy current testing method of high voltage cable accessories[J]. High Voltage Engineering, 2018, 44(11): 3720-3726. [15] HAIKALI E N N, NYAMUPANGEDENGU C. Measured and simulated time-evolution PD characteristics of typical installation defects in MV XLPE cable terminations[J]. SAIEE Africa Research Journal, 2019, 110(3): 136-144. doi: 10.23919/SAIEE.2019.8732785 [16] HE W S, WU Z G, DENG B F, et al. On-site partial discharge detection of power cables using a novel DAC technique supplied by a capacitor bank[J]. IET Generation, Transmission & Distribution, 2019, 13(23): 5349-5356. [17] GULSKI E, CICHECKI P, WESTER F, et al. On-site testing and PD diagnosis of high voltage power cables[J]. IEEE Transactions on Dielectrics and Electrical Insulation, 2008, 15(6): 1691-1700. [18] 白龙雷, 周利军, 曹伟东, 等. −40 ℃条件下EPR电缆终端气隙放电发展特性[J]. 高电压技术, 2020, 46(10): 3605-3614.BAI Longlei, ZHOU Lijun, CAO Weidong, et al. Characteristics of partial discharge in air gap defects in EPR cable termination under −40 ℃ condition[J]. High Voltage Engineering, 2020, 46(10): 3605-3614. [19] ÁLVAREZ F, GARNACHO F, ORTEGO J , et al. Application of HFCT and UHF sensors in on-line partial discharge measurements for insulation diagnosis of high voltage equipment[J]. Sensors, 2015, 15(4): 7360-7387. [20] WANG M H, LU S D, LIAO R M. Fault diagnosis for power cables based on convolutional neural network with chaotic system and discrete wavelet transform[J]. IEEE Transactions on Power Delivery, 2022, 37(1): 582-590. [21] CANDELA R, MIRELLI G, SCHIFANI R. PD recognition by means of statistical and fractal parameters and a neural network[J]. IEEE Transactions on Dielectrics and Electrical Insulation, 2000, 7(1): 87-94. [22] ZHOU K, LI Z R, ZHU G Y, et al. An adaptive pulse separation strategy for PD detection in frequency-tuned resonant tests[J]. IEEE Transactions on Instrumentation and Measurement, 2021, 70: 9002009.1-9002009.9. [23] HE W S, WU Z G, BAO J K, et al. The on-site detection technique for silicone oil level in high voltage cable terminal using infrared image processing techniques[C]//2021 IEEE 4th International Electrical and Energy Conference (CIEEC). Wuhan: IEEE, 2021: 1-5. [24] 徐小冰, 袁婧, 廖雁群, 等. 基于Faster RCNN与Mean-Shift的电缆附件缺陷红外图像自动诊断方法[J]. 高电压技术, 2020, 46(9): 3070-3080.XU Xiaobing, YUAN Jing, LIAO Yanqun, et al. Autonomous diagnosis method for defects of cable accessories based on faster RCNN and mean-shift algorithm by infrared images[J]. High Voltage Engineering, 2020, 46(9): 3070-3080. [25] 方春华, 胡冻三, 陶玉宁, 等. 高压电缆终端铅封缺陷超声相控阵柔性耦合检测[J]. 高电压技术, 2022, 48(1): 29-37.FANG Chunhua, HU Dongsan, TAO Yuning, et al. Ultrasonic phased array flexible coupling detection of lead-sealing defects in high voltage cable terminals[J]. High Voltage Engineering, 2022, 48(1): 29-37. -

 下载:
下载:


 点击查看大图
点击查看大图

计量
- 文章访问数: 440
- HTML全文浏览量: 194
- PDF下载量: 54
- 被引次数: 0