

Nonlinear Prediction and Inversion of Civil Engineering Cost of Urban Rail Transit
-
摘要:
为解决城市轨道交通土建工程传统造价预测模型缺乏决策信服力的问题,首先,运用特征选择与知识判断方法提取城市轨道交通土建工程造价关键影响因素并建立工程案例数据库;然后,通过粒子群优化(PSO)聚类算法筛选相似案例,采用基于灰狼优化算法(GWO)的极限学习机(ELM)建立土建工程造价非线性预测模型并设计双环境对比实验;最后,将Sobol’ 全局敏感性分析和Curve Fitting分析用于模型解释性反演,并以成都市轨道交通10号线1期工程为例验证模型优越性. 研究结果表明:模型平均绝对误差与均方根误差分别为0.113 9和0.127 4,平均绝对百分比误差为4.14%,非线性造价预测模型预测效果优于线性模型,同时采用因素优化与案例聚类方法所得预测效果更好;全局敏感性分析发现,地下线长度和地下车站数的总敏感度明显高于其他因素,可作为方案优化重点调节因素;采用Curve Fitting分析提高了机器学习智能预测模型作用机理“黑箱”效应33.70%~64.52%的解释性.
Abstract:The traditional prediction model for the civil engineering cost of urban rail transit lacks decision-making credibility. To address this issue, First, critical factors affecting the civil engineering cost of urban rail transit were retrieved utilizing the feature selection and knowledge judgment methods, and an engineering case database was created. Then, similar cases were screened using the particle swarm optimization (PSO) clustering algorithm, and a nonlinear prediction model of civil engineering cost was established using the extreme learning machine (ELM) based on gray wolf optimizer (GWO), followed by a dual environment comparison experiment. Finally, Sobol’s global sensitivity analysis and curve fitting analysis were conducted to invert the model and validate its superiority by using the Chengdu Rail Transit Line 10 Phase 1 Project as an example. The results show that the prediction model’s mean absolute error and root mean square error are 0.113 9 and 0.127 4, respectively, and the mean absolute percentage error is 4.14%. The prediction effect of the nonlinear cost prediction model is better than that of the linear model, and the better prediction effect is obtained by simultaneously using the factor optimization and case clustering methods. The global sensitivity study reveals that the total sensitivity of the subterranean line length and the number of underground stations is much larger than the other factors, making them the major factors to be adjusted for the scheme optimization. The “black box” effect of intelligent predictive modeling mechanism based on machine learning is better understood by 33.70%–64.52% when curve fitting analysis is used.
-
Key words:
- urban rail transit /
- civil engineering /
- cost prediction /
- GWO-ELM model /
- anti-analysis
-
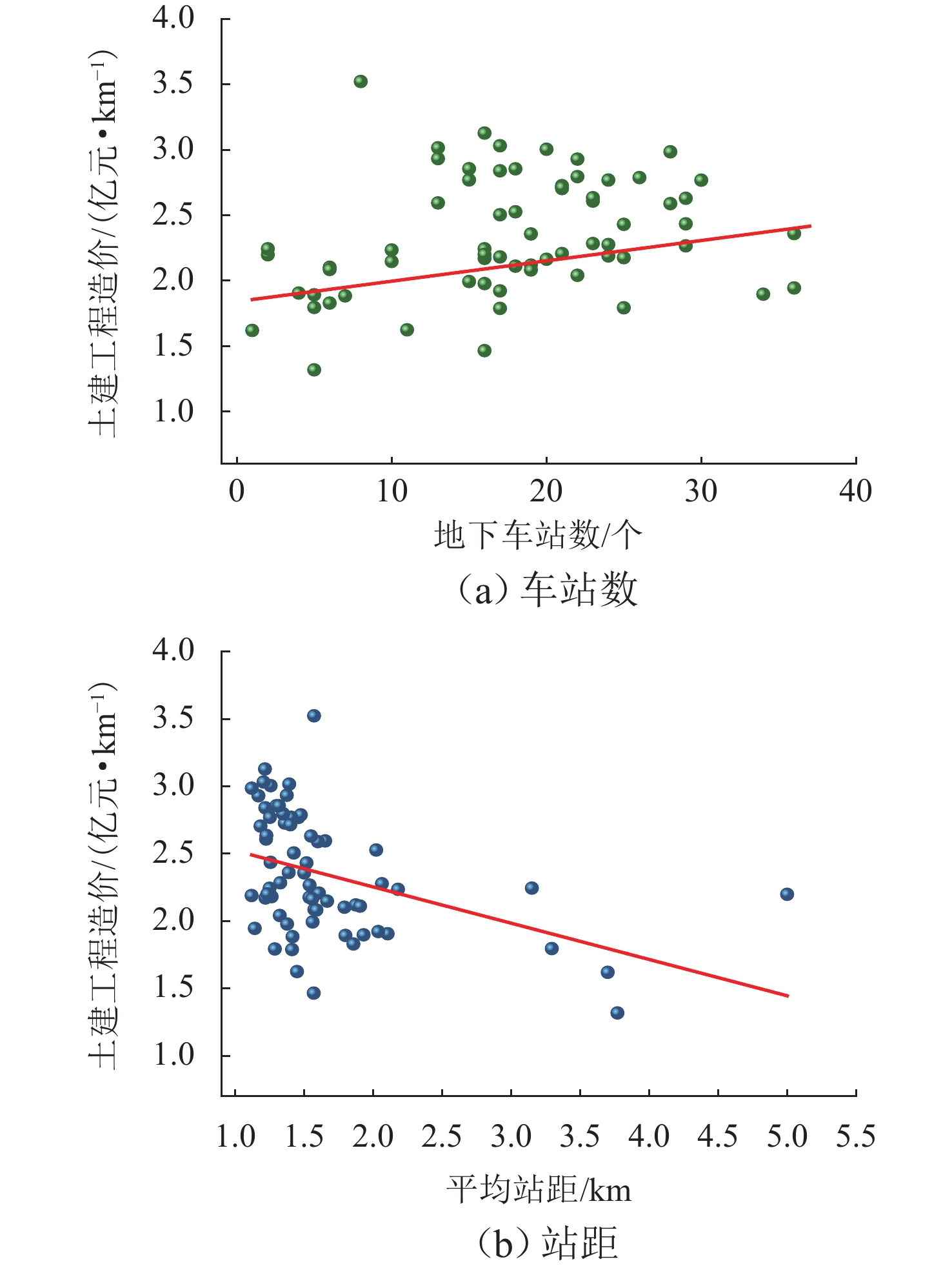
图 1 因素自变量与造价因变量间的拟合关系
Figure 1. Fitting relationship between independent variable of factor and dependent variable of cost

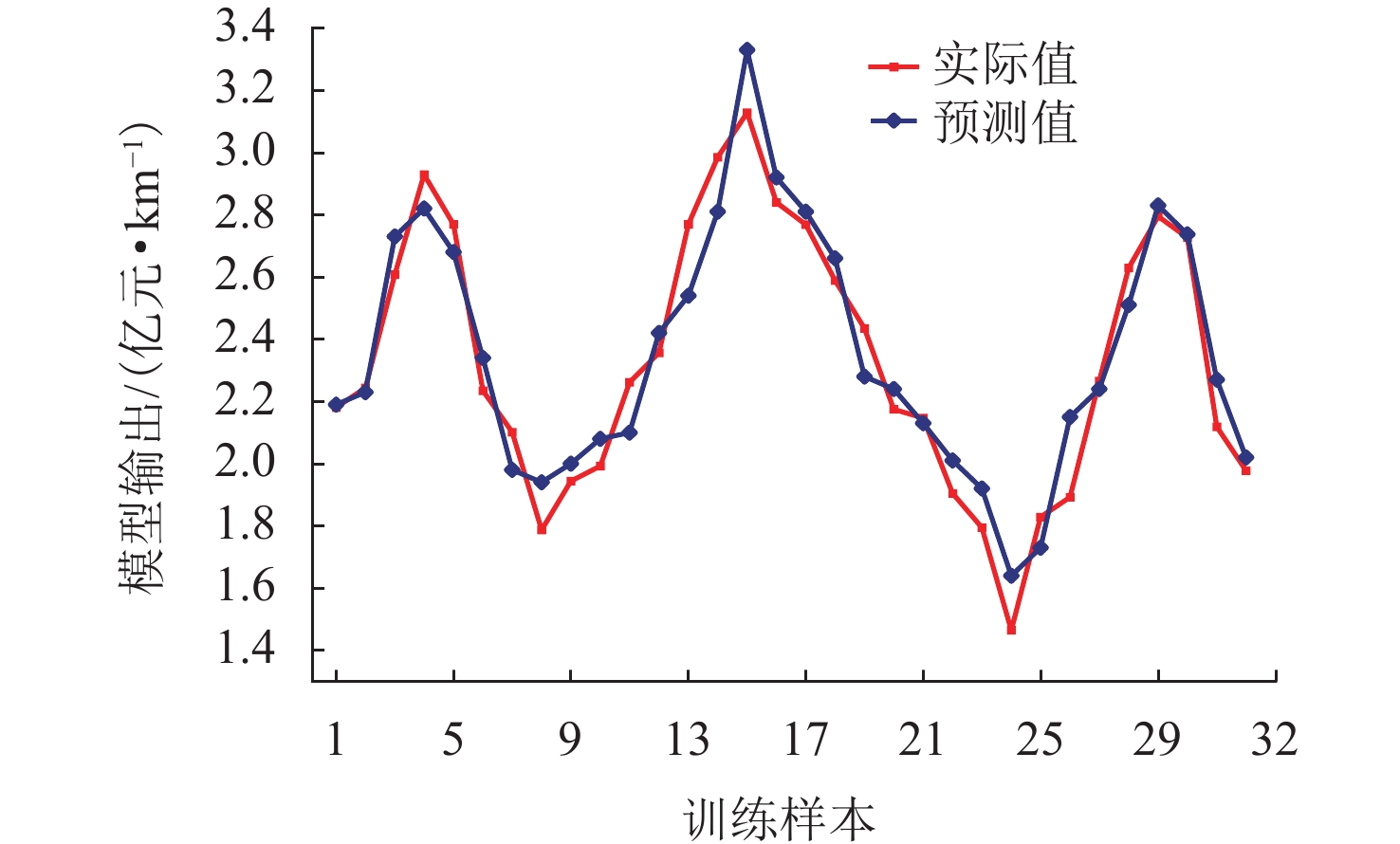
图 5 不同模型相同环境下性能对比
Figure 5. Performance comparison of different models in the same environment

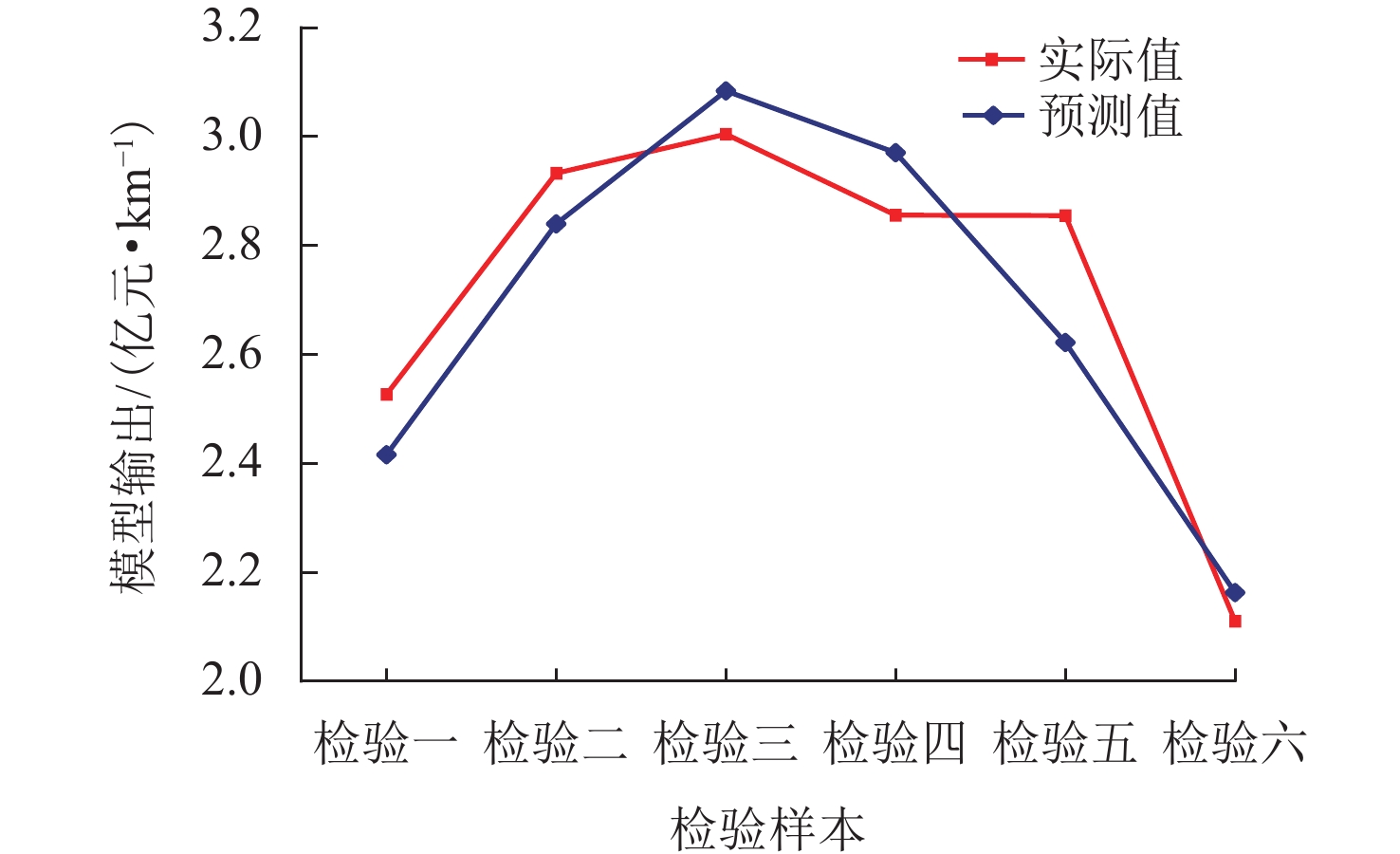
图 6 相同模型不同环境下性能对比
Figure 6. Performance comparison of same model in different environments
表 1 全局敏感性分析结果
Table 1. Global sensitivity analysis results
影响因素 地下线长度 高架线长度 地下车站数 地上车站数 平均站距 编组 工程环境及
地质条件国内生产总值 居民消费
价格指数总敏感度 0.653 6 0.060 3 0.223 6 0.012 4 0.008 3 0.019 3 0.000 8 0.003 1 0.018 2  下载: 导出CSV
下载: 导出CSV
表 2 线性拟合函数式及其对比
Table 2. Linear fitting functions and their comparison
影响因素 拟合函数式 拟合函数式影响因素
与土建造价相关性原始数据中影响因素
与土建造价相关性对比结果 地下线长度 f(x)=0.007 1x + 2.179 0 正相关 0.203 1 (正相关) 一致 高架线长度 f(x)=−0.059 2x + 2.467 0 负相关 −0.498 8 (负相关) 一致 地下车站数 f(x)=0.014 0x + 2.114 0 正相关 0.255 4 (正相关) 一致 地上车站数 f(x)=−0.101 4x + 2.455 0 负相关 −0.443 6 (负相关) 一致 平均站距 f(x)=−0.073 3x + 2.491 0 负相关 −0.167 1 (负相关) 一致 编组 f(x)=0.080 2x + 1.781 0 正相关 0.266 0 (正相关) 一致 工程环境及地质条件 f(x)=0.065 4x + 2.205 0 正相关 0.127 0 (正相关) 一致 国内生产总值 f(x)=0.000 1x + 2.202 0 正相关 0.253 5 (正相关) 一致 居民消费价格指数 f(x)=0.039 1x − 1.636 0 正相关 0.138 8 (正相关) 一致
下载: 导出CSV
表 3 各因素最优拟合函数式
Table 3. Optimal fitting functions of different factors
影响因素 拟合函数式 R2 地下线长度 f(x)=2.317 0 − 0.216 0cos 0.142 6x − 0.113 9sin 0.142 6x + 0.153 4cos 0.285 2x + 0.048 5 ×
sin 0.285 2x + 0.247 2cos 0.427 8x + 0.125 4sin 0.427 8x + 0.007 9cos 0.570 4x − 0.085 2 ×
sin 0.570 4x + 0.214 8cos 0.713 0x + 0.007 5sin 0.713 0x − 0.042 0cos 0.855 6x + 0.009 1 ×
sin 0.855 6x + 0.025 3cos 0.998 2x − 0.164 8sin 0.998 2x − 0.089 6cos 1.140 8x + 0.066 4sin 1.140 8x0.645 2 高架线长度 f(x)=− 6 409 + 104cos 0.998 9x + 8 473sin 0.998 9x − 2 120cos 1.997 8x − 12 500sin 1.997 8x −
5 779cos 2.996 7x + 8 477sin 2.996 7x + 7 112cos 3.995 6x − 720.100 0sin 3.995 6x −
3 340cos 4.994 5x − 2 932sin 4.994 5x + 463.200 0cos 5.993 4x + 1 899sin 5.993 4x +
74.800 0cos 6.992 3x − 395.100 0sin 6.992 3x0.488 5 地下车站数 f(x)=− 3.368 0 109 + 5.946 0 109cos 0.046 2x + 2.665 0 109sin 0.046 2x − 3.327 0 109cos 0.092 4x −
4.480 0 109sin 0.092 4x + 1.306 0 108cos 0.138 6x + 3.879 0 109sin 0.138 6x +
1.234 0 109cos 0.184 8x − 1.667 0 109sin 0.184 8x − 7.959 0 108cos 0.231 0x +
1.796 0 108sin 0.231 0x + 1.940 0 108cos 0.277 2x + 1.099 0 108sin 0.277 2x −
1.126 0 107cos 0.323 4x − 3.620 0 107sin 0.323 4x − 1.356 0 106cos 0.369 6x + 2.710 0 106sin 0.369 6x0.486 8 地上车站数 f(x)=0.007 9x5 − 0.139 2x4 + 0.823 5x3 − 1.875 0x2 + 1.143 0x + 2.530 0 0.337 0 平均站距 f(x)=3.088 0 1011 + 1.954 0 1010cos 0.811 8x − 5.568 0 1011sin 0.811 8x − 4.067 0 1011cos 1.623 6x −
2.742 0 1010sin 1.623 6x − 2.242 0 1010cos 2.435 4x + 2.381 0 1011sin 2.435 4x +
1.096 0 1011cos 3.247 2x + 1.231 0 1010sin 3.247 2x + 4.558 0 109cos 4.059 0x −
3.827 0 1010sin 4.059 0x − 9.559 0 109cos 4.870 8x − 1.067 0 109sin 4.870 8x −
1.333 0 108cos 5.682 6x + 1.521 0 109sin 5.682 6x + 1.157 0 108cos 6.494 4x + 5.302 0 106sin 6.494 4x0.579 1 编组 f(x)=− 0.008 9x4 + 0.226 1x3 − 2.071 0x2 + 8.206 0x-9.692 0 0.089 3 工程环境及
地质条件f(x)=2.320 0 − 0.266 6cos 1.571 0x − 0.118 8sin 1.571 0x 0.068 9 国内生产
总值f(x)=1.751 0 + 0.189 1cos 2.361 0x − 1.345 0sin 2.361 0x + 1.109 0cos 4.722 0x +
0.535 3sin 4.722 0x − 1.252 0cos 7.083 0x + 0.429 1sin 7.083 0x + 1.131 0cos 9.444 0x −
0.997 2sin 9.444 0x − 0.349 1cos 11.805 0x + 1.747 0sin 11.805 0x − 0.817 2cos 14.166 0x −
1.829 0sin 14.166 0x + 1.257 0cos 16.527 0x + 0.705 4sin 16.527 0x − 0.434 9cos 18.888 0x +
0.305 6sin 18.888 0x0.526 1 居民消费价格指数 f(x)=2.185 0 + 0.058 3cos 5.835 0x − 0.145 6sin 5.835 0x − 0.203 1cos 11.670 0x +
0.237 2sin 11.670 0x + 0.050 6cos 17.505 0x + 0.138 8sin 17.505 0x + 0.106 0cos 23.340 0x −
0.051 0sin 23.340 0x + 0.179 2cos 29.175 0x − 0.239 2sin 29.175 0x − 0.027 0cos 35.010 0x +
0.246 6sin 35.010 0x + 0.021 3cos 40.845 0x − 0.346 3sin 40.845 0x + 0.231 5cos 46.680 0x −
0.089 9sin 46.680 0x0.486 7
下载: 导出CSV
-
[1] 张飞涟,梁秀峰. 基于GA-ELM的城市轨道交通工程投资估算方法研究[J]. 铁道科学与工程学报,2019,16(7): 1842-1848.ZHANG Feilian, LIANG Xiufeng. Research on investment estimation method of urban rail transit project based on GA-ELM[J]. Journal of Railway Science and Engineering, 2019, 16(7): 1842-1848. [2] 段晓晨,孟春成,施振东,等. 地铁车站建设投资智能预测与控制方法研究[J]. 铁道工程学报,2021,38(9): 106-111. doi: 10.3969/j.issn.1006-2106.2021.09.018DUAN Xiaochen, MENG Chuncheng, SHI Zhendong, et al. Research on the intelligent forecast and control method of metro station construction investment[J]. Journal of Railway Engineering Society, 2021, 38(9): 106-111. doi: 10.3969/j.issn.1006-2106.2021.09.018 [3] 巫玲玲. 城市轨道交通经济指标统计及其影响因素分析[J]. 施工技术,2020,49(增1): 1432-1436.WU Lingling. Economic index statistics of urban rail transit and its influencing factors[J]. Construction Technology, 2020, 49(S1): 1432-1436. [4] 中华人民共和国住房和城乡建设部办公厅. 工程造价改革工作方案[EB/OL]. (2020-07-24) [2023-01-11]. https://www. mohurd. gov. cn/gongkai/fdzdgknr/tzgg/ 202007/20200729_246578. html. [5] 段晓晨,陈雨欣,施振东,等. 地铁工程建设投资智能估算方法研究[J]. 铁道工程学报,2021,38(11): 109-114. doi: 10.3969/j.issn.1006-2106.2021.11.018DUAN Xiaochen, CHEN Yuxin, SHI Zhendong, et al. Research on the intelligent estimation method of metro construction investment[J]. Journal of Railway Engineering Society, 2021, 38(11): 109-114. doi: 10.3969/j.issn.1006-2106.2021.11.018 [6] 赵欣. 基于BP神经网络的地铁土建工程造价估算方法研究[D]. 北京:北京交通大学,2008. [7] 陈进杰. 城市轨道交通项目广义全寿命周期成本理论与应用研究[D]. 北京:北京交通大学,2011. [8] 杨文成,王圆圆,孙军先. 基于KR-SVM的城市轨道交通建设成本估算评价模型研究[J]. 交通工程,2017,17(3): 40-46.YANG Wencheng, WANG Yuanyuan, SUN Junxian. The research on evaluation model of urban rail transit construction cost based on KR-SVM[J]. Journal of Transportation Engineering, 2017, 17(3): 40-46. [9] ELMOUSALAMI H H. Artificial intelligence and parametric construction cost estimate modeling: state-of-the-art review[J]. Journal of Construction Engineering and Management, 2020, 146(1): 03119008.1-03119008.30. [10] 陈政,郭春,谌桂舟,等. 基于MEC-BP高海拔隧道供氧浓度与劳动强度规律[J]. 西南交通大学学报,2023,58(3): 622-629.CHEN Zheng, GUO Chun, CHEN Guizhou, et al. Oxygen supply concentration and labor intensity of high altitude tunnel based on MEC-BP[J]. Journal of Southwest Jiaotong University, 2023, 58(3): 622-629. [11] 杨飞,郝晓莉,杨建,等. 基于多车型CNN-GRU性能预测模型的轨道状态评价[J]. 西南交通大学学报,2023,58(2): 322-331.YANG Fei, HAO Xiaoli, YANG Jian, et al. Track condition evaluation for multi-vehicle performance prediction model based on convolutional neural network and gated recurrent unit[J]. Journal of Southwest Jiaotong University, 2023, 58(2): 322-331. [12] 王彪,秦勇,贾利民,等. 监测数据驱动的城轨列车轴箱轴承剩余寿命预测[J]. 西南交通大学学报,2024,59(1):229-238.WANG Biao, QIN Yong, JIA Limin, et al. Monitoring data-driven prediction of remaining useful life of axle-box bearings for urban rail transit trains[J]. Journal of Southwest Jiaotong University, 2024, 59(1):229-238. [13] HUANG G B, ZHOU H M, DING X J, et al. Extreme learning machine for regression and multiclass classification[J]. IEEE Transactions on Systems, Man, and Cybernetics Part B (Cybernetics), 2012, 42(2): 513-529. doi: 10.1109/TSMCB.2011.2168604 [14] KARACA I, GRANSBERG D D, JEONG H D. Improving the accuracy of early cost estimates on transportation infrastructure projects[J]. Journal of Management in Engineering, 2020, 36(5): 04020063.1-04020063.11. [15] SOBOLÁ I M. Global sensitivity indices for nonlinear mathematical models and their Monte Carlo estimates[J]. Mathematics and Computers in Simulation, 2001, 55(1/2/3): 271-280. [16] 赵美玲. 基于SPA—Vague集的地铁TOC反馈快速投资估算方法研究[D]. 南昌:华东交通大学,2017. [17] 刘丹. 城市轨道交通工程造价控制分析[J]. 铁道工程学报,2014,31(6): 104-108.LIU Dan. Analysis of cost control of urban rail transportation construction[J]. Journal of Railway Engineering Society, 2014, 31(6): 104-108. [18] 中华人民共和国住房和城乡建设部. 城市轨道交通岩土工程勘察规范:GB 50307—2012[S]. 北京: 中国计划出版社,2012. [19] 王芳英. 地铁工程综合造价指标解析[J]. 铁路工程造价管理,2012,27(5):33-36.WANG Fangying. Analysis of subway engineering comprehensive cost index[J]. Railway Engineering Cost Management,2012,27(5):33-36. [20] 中华人民共和国住房和城乡建设部. 地铁设计规范:GB 50157—2013[S]. 北京:中国建筑工业出版社,2013. [21] RAFIEI M H, ADELI H. Novel machine-learning model for estimating construction costs considering economic variables and indexes[J]. Journal of Construction Engineering and Management, 2018, 144(12): 04018106.1-04018106.9. [22] ROBNIK-ŠIKONJA M, KONONENKO I. Theoretical and empirical analysis of ReliefF and RReliefF[J]. Machine Learning, 2003, 53(1): 23-69. [23] 段晓晨,孟春成,吴曼茜,等. 地铁车站土建工程施工进度三维动态优化控制[J]. 地下空间与工程学报,2022,18(5): 1678-1688.DUAN Xiaochen, MENG Chuncheng, WU Manxi, et al. 3D dynamic optimal control of civil engineering construction schedule of metro station[J]. Chinese Journal of Underground Space and Engineering, 2022, 18(5): 1678-1688. [24] 夏英,刘敏. 基于时空注意力卷积神经网络的交通流量预测[J]. 西南交通大学学报,2023,58(2): 340-347.XIA Ying, LIU Min. Traffic flow prediction based on spatial-temporal attention convolutional neural network[J]. Journal of Southwest Jiaotong University, 2023, 58(2): 340-347. [25] 梅瀚雨,王骑,廖海黎,等. 基于集成式神经网络的扁平箱梁颤振导数预测[J]. 西南交通大学学报,2022,57(4): 894-902.MEI Hanyu, WANG Qi, LIAO Haili, et al. Flutter derivative prediction of flat box girder based on ensembled neural network[J]. Journal of Southwest Jiaotong University, 2022, 57(4): 894-902. -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 615
- HTML全文浏览量: 191
- PDF下载量: 52
- 被引次数: 0