

Site Effects of Linear Method and Modified Horizontal-to-Vertical Spectral Ratio
-
摘要:
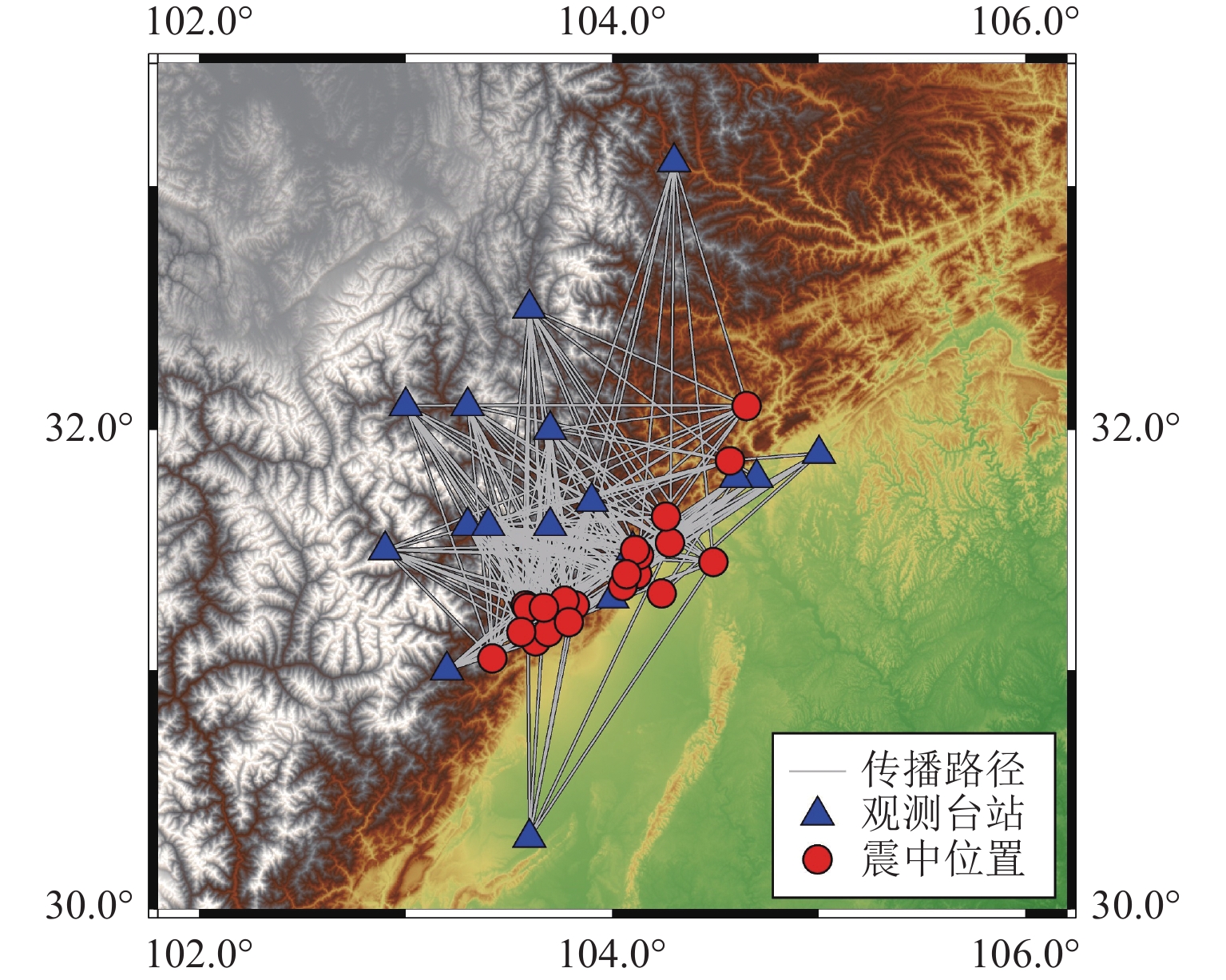
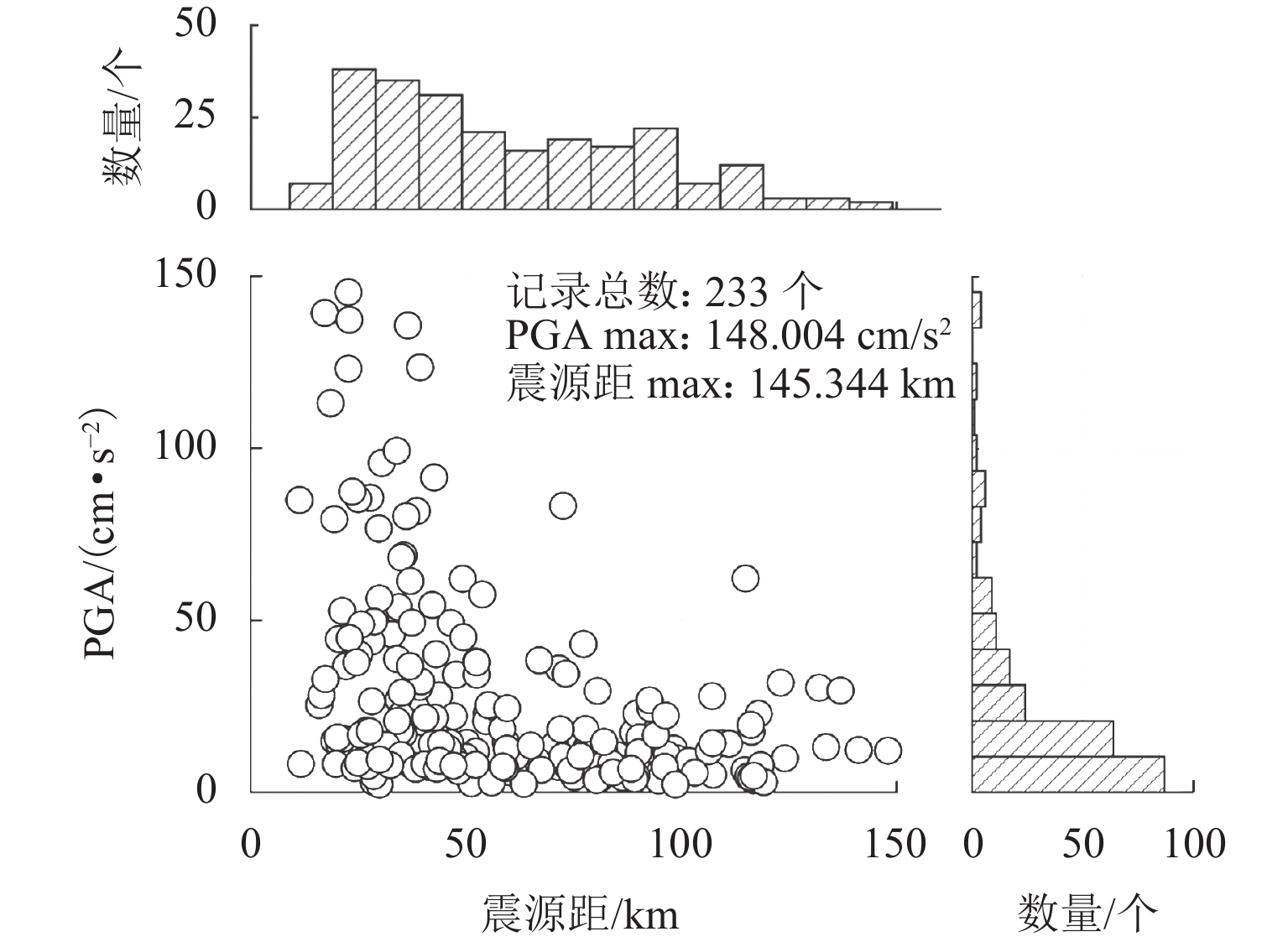
为进一步研究工程地震动场地效应的影响,基于水平垂直谱比法(HVSR)、线性反演法2种经验方法对四川强震区地震动场地效应进行对比分析. 首先,依据震级、台站、震中距离等因素挑选出汶川地震余震中由17个强震动台站捕获的233组强震动波形;其次,基于龙门山地区铰链三段式衰减模型,采用线性反演法估计S波的品质因子
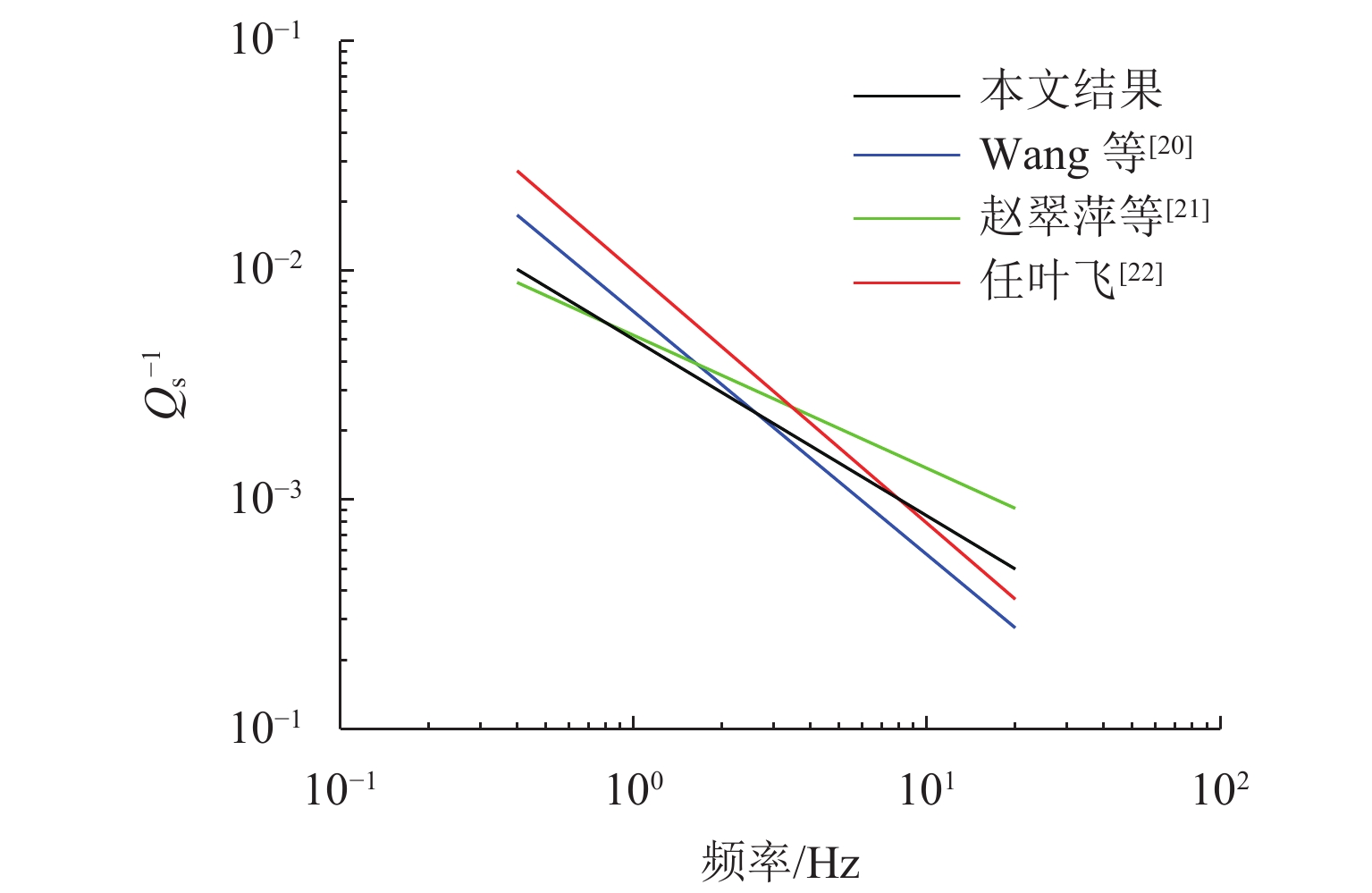
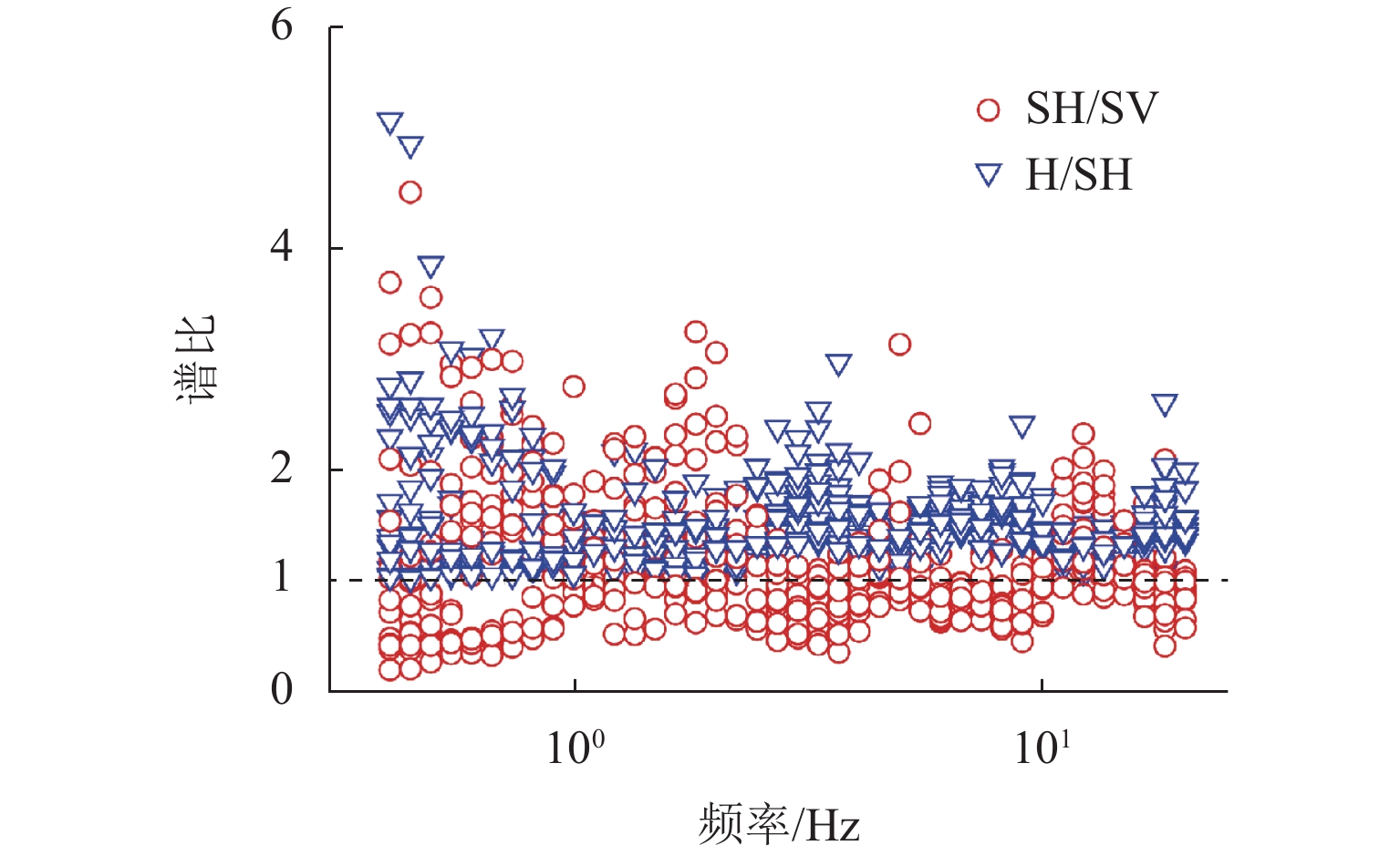
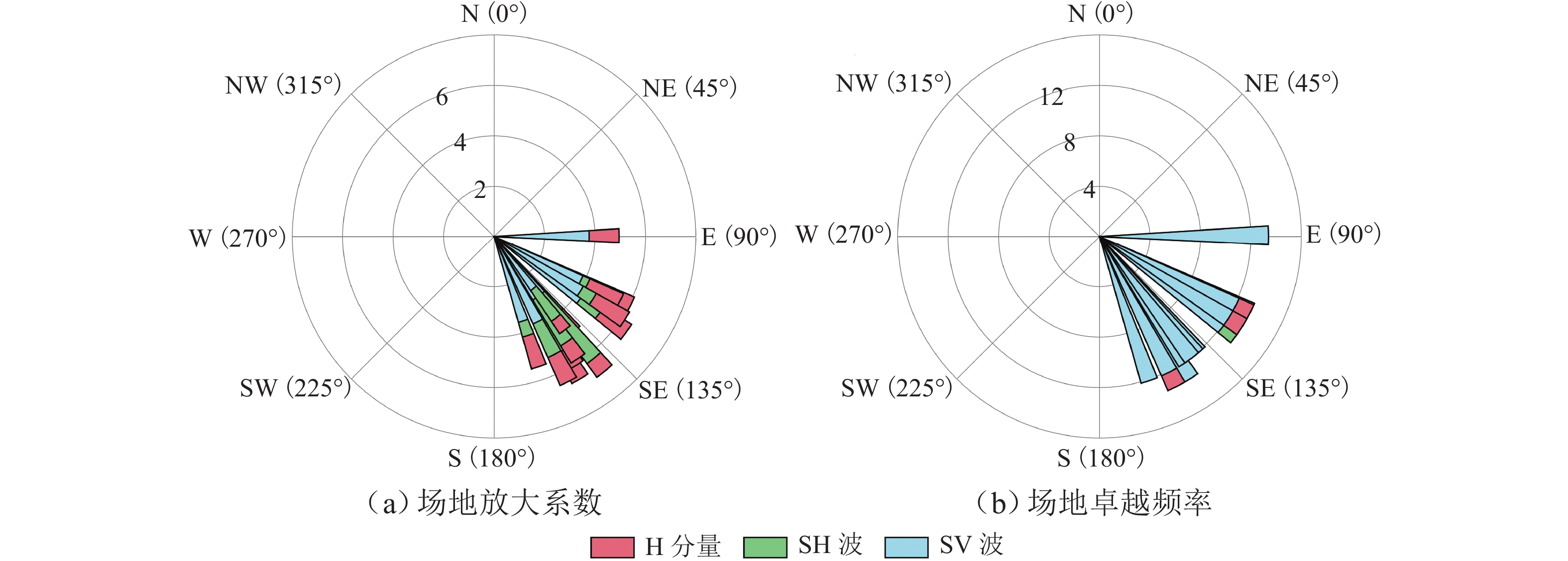
Q s,同时应用旋转HVSR、多向HVSR 2种方法解释了地震波传播中方位角对HVSR场地效应的影响机制;最后,分析了线性反演法与HVSR法计算的场地效应产生差异性的原因,在此基础上提出了改进的HVSR法以提高场地效应评估的准确性. 研究结果发现:该区域S波的品质因子与频率相关,且在0.4~20.0 Hz内近似等于199.2f 0.8 (f 为频率);HVSR的结果具有优势方向,随着方位角的改变,场地效应会在某一角度突然增大,与场地土层的各向异性有关;竖向地震动的放大,即场地土层、工程基岩或中深部硬岩层耦合形成的竖向场地效应,是HVSR法与线性反演法产生差异的主要原因.Abstract:In order to further study the influence of site effects from engineering ground motion, a comparative analysis of site effects from ground motion in the Sichuan strong earthquake area was carried out based on two empirical methods, namely, horizontal-to-vertical spectral ratio (HVSR) and linear inversion. Firstly, 233 sets of strong motion waveforms captured by 17 strong motion stations during the aftershocks of the Wenchuan Earthquake were selected based on the magnitude, station, distance from the epicenter, and other factors. Second, the linear inversion method was used to estimate the quality factor
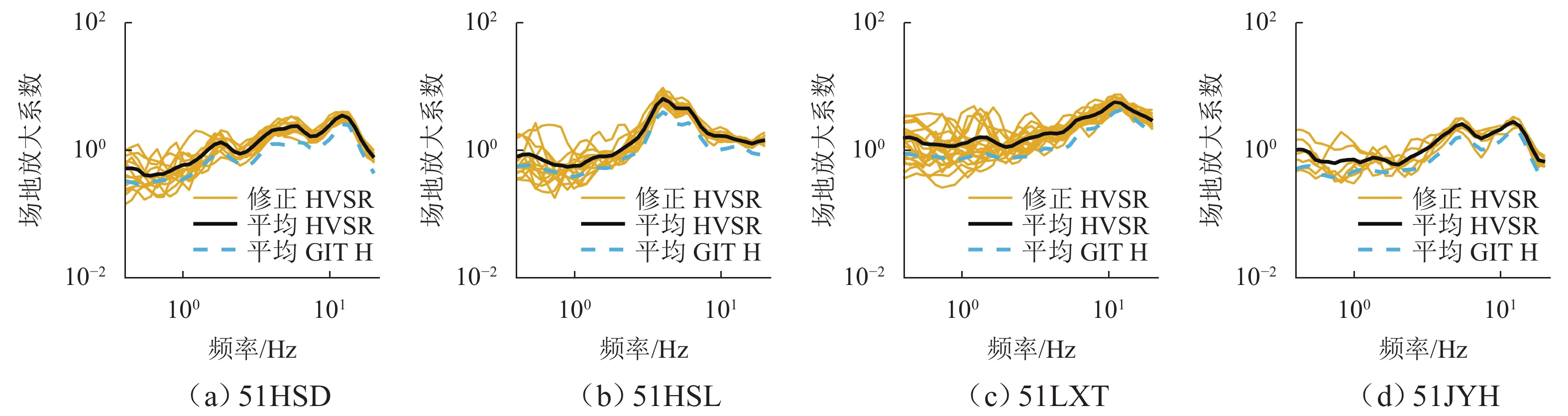
Q s of the S-wave based on the hinged three-stage attenuation model in the Longmenshan area. Meanwhile, two methods, rotational HVSR and multidirectional HVSR, were applied to explain the mechanism of the site effect of azimuthal angle on HVSR in seismic wave propagation. Finally, the possible reasons for the variability of the site effects calculated by the linear inversion and HVSR methods were analyzed, based on which an improved HVSR method was proposed to improve the accuracy of the site effect assessment. The results show that the quality factor of the S-wave in the area is frequency-dependent and approximately equals to 199.2f 0.8 in the range of 0.4–20.0 Hz. The results of HVSR may have a certain dominant direction, and the site effect may increase suddenly at a certain angle with the change of the azimuthal angle, which may be related to the anisotropy of the soil layer at the site. The amplification of vertical ground motion, i.e., the vertical site effect formed by the coupling of soil layer at the site, engineered bedrock, or middle and deep hard rock layers, is the main reason for the difference between HVSR and linear inversion methods.-
Key words:
- site effects /
- Qs value /
- linear inversion /
- HVSR method /
- azimuthal angle
-
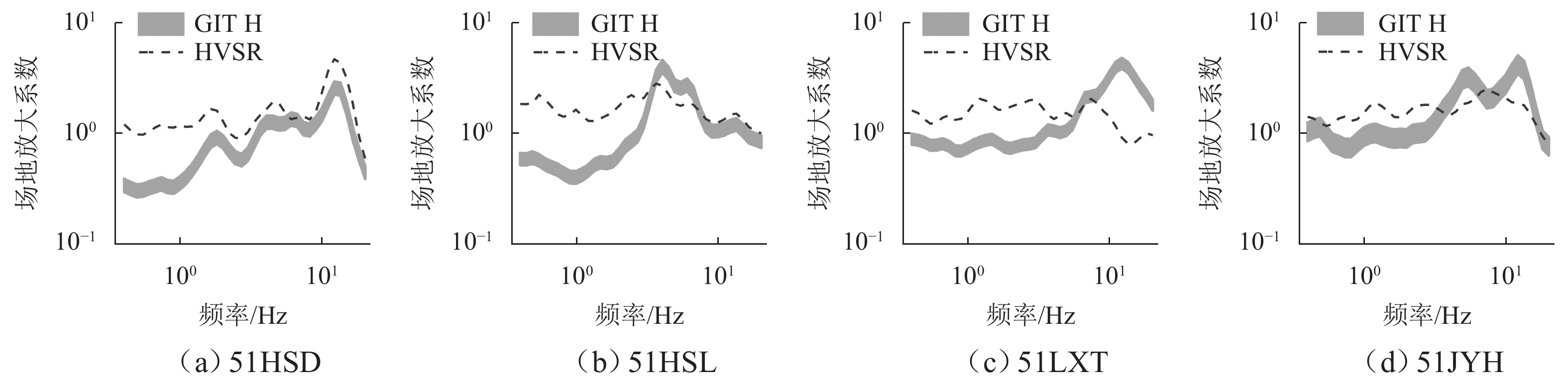
图 8 HVSR与线性反演法场地效应的对比
Figure 8. Comparison of site effects between HVSR and linear inversion
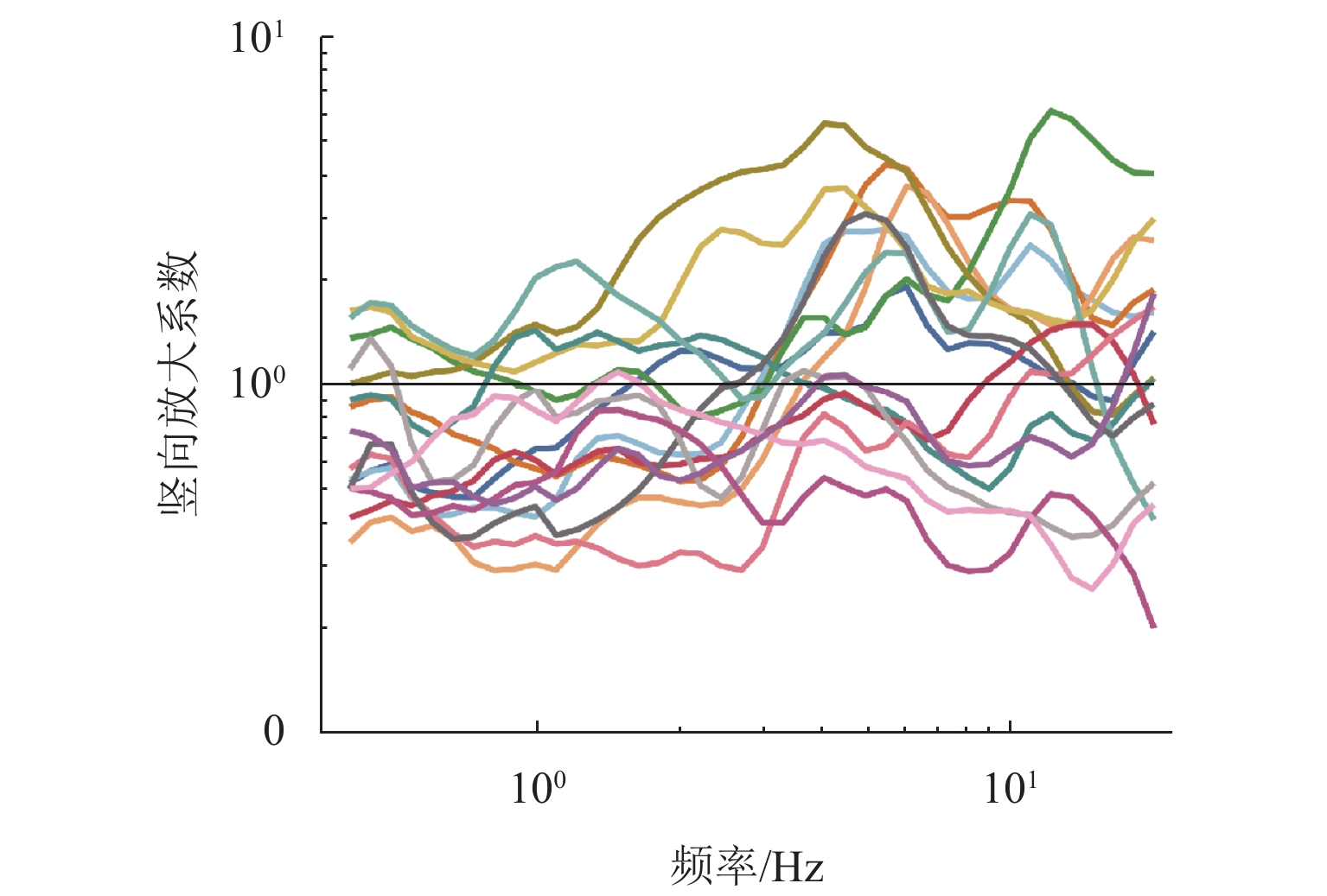
图 9 线性反演计算的17个台站竖向场地效应的结果
Figure 9. Results of vertical site effects calculated by linear inversion for 17 stations
-
[1] KAKLAMANOS J, CABAS A, PAROLAI S, et al. Introduction to the special section on advances in site response estimation[J]. Bulletin of the Seismological Society of America, 2021, 111(4): 1665-1676. doi: 10.1785/0120210152 [2] LEE V W, TRIFUNAC M D. Should average shear-wave velocity in the top 30 m of soil be used to describe seismic amplification?[J]. Soil Dynamics and Earthquake Engineering, 2010, 30(11): 1250-1258. doi: 10.1016/j.soildyn.2010.05.007 [3] BORA S S, SCHERBAUM F, KUEHN N, et al. Development of a response spectral ground-motion prediction equation (GMPE) for seismic-hazard analysis from empirical Fourier spectral and duration models[J]. Bulletin of the Seismological Society of America, 2015, 105(4): 2192-2218. doi: 10.1785/0120140297 [4] Y BARD P, BORA S S, HOLLENDER F, et al. Are the standard VS-kappa host-to-target adjustments the only way to get consistent hard-rock ground motion prediction?[J]. Pure and Applied Geophysics, 2020, 177(5): 2049-2068. doi: 10.1007/s00024-019-02173-9 [5] BORCHERDT R. Effects of local geology on ground motion near San Francisco Bay[J]. Bulletin of the Seismological Society of America, 1970, 60: 29-61. [6] NAKAMURA Y. A method for dynamic characteristics estimation of subsurface using microtremor on the ground surface[J]. Quarterly Report of Rtri, 1989, 30(1): 25-30. [7] ANDREWS D J. Objective determination of source parameters and similarity of earthquakes of different size[M]//Earthquake Source Mechanics. Washington D. C.: American Geophysical Union, 2013: 259-267. [8] 王宏伟,任叶飞,温瑞智,等. 地震动非参数化谱反演可靠性分析[J]. 西南交通大学学报,2022,57(1): 182-190. doi: 10.3969/j.issn.0258-2724.20200241WANG Hongwei, REN Yefei, WEN Ruizhi, et al. Reliability analysis on non-parametric spectral inversion of seismic ground motion[J]. Journal of Southwest Jiaotong University, 2022, 57(1): 182-190. doi: 10.3969/j.issn.0258-2724.20200241 [9] 周影. 复杂板块构造下地震动路径衰减及震源特性研究[D]. 哈尔滨:中国地震局工程力学研究所,2021. [10] LERMO J, CHÁVEZ-GARCÍA F J. Site effect evaluation using spectral ratios with only one station[J]. Bulletin of the Seismological Society of America, 1993, 83(5): 1574-1594. doi: 10.1785/BSSA0830051574 [11] AMERI G, OTH A, PILZ M, et al. Separation of source and site effects by generalized inversion technique using the aftershock recordings of the 2009 L’Aquila earthquake[J]. Bulletin of Earthquake Engineering, 2011, 9(3): 717-739. doi: 10.1007/s10518-011-9248-4 [12] ATKINSON B, MEREU R. The shape of ground motion attenuation curves in southeastern Canada[J]. Bulletin of the Seismological Society of America, 1992, 82(5): 2014-2031. doi: 10.1785/BSSA0820052014 [13] REN Y F, WEN R Z, YAMANAKA H, et al. Site effects by generalized inversion technique using strong motion recordings of the 2008 Wenchuan earthquake[J]. Earthquake Engineering and Engineering Vibration, 2013, 12(2): 165-184. doi: 10.1007/s11803-013-0160-6 [14] 宋健,师黎静,党鹏飞,等. 考虑海域衰减特性的日本相模湾海底场地放大研究[J]. 土木工程学报,2021,54(12): 74-84.SONG Jian, SHI Lijing, DANG Pengfei, et al. Study on site amplification of strong ground motion stations considering attenuation characteristics of the sea area in the Sagami Bay area, Japan[J]. China Civil Engineering Journal, 2021, 54(12): 74-84. [15] 姚鑫鑫,任叶飞,岸田忠大,等. 强震动记录的数据处理流程:去噪滤波[J]. 工程力学,2022,39(增1): 320-329.YAO Xinxin, REN Yefei, AN Tianzhongda, et al. The procedure of filtering the strong motion record: denoising and filtering[J]. Engineering Mechanics, 2022, 39(S1): 320-329. [16] KONNO K, OHMACHI T. Ground-motion characteristics estimated from spectral ratio between horizontal and vertical components of microtremor[J]. Bulletin of the Seismological Society of America, 1998, 88(1): 228-241. doi: 10.1785/BSSA0880010228 [17] LI J Y, ZHOU B G, RONG M S, et al. Estimation of source spectra, attenuation, and site responses from strong-motion data recorded in the 2019 Changning earthquake sequence[J]. Bulletin of the Seismological Society of America, 2020, 110(2): 410-426. doi: 10.1785/0120190207 [18] PAIGE C C, SAUNDERS M A. Algorithm 583: LSQR: sparse linear equations and least squares problems[J]. ACM Transactions on Mathematical Software, 1982, 8(2): 195-209. doi: 10.1145/355993.356000 [19] 林向东,葛洪魁,徐平,等. 近场全波形反演:芦山7.0级地震及余震矩张量解[J]. 地球物理学报,2013,56(12): 4037-4047. doi: 10.6038/cjg20131209LIN Xiangdong, GE Hongkui, XU Ping, et al. Near field full waveform inversion: Lushan magnitude 7.0 earthquake and its aftershock moment tensor[J]. Chinese Journal of Geophysics, 2013, 56(12): 4037-4047. doi: 10.6038/cjg20131209 [20] WANG H W, REN Y F, WEN R Z. Source parameters, path attenuation and site effects from strong-motion recordings of the Wenchuan aftershocks (2008-2013) using a non-parametric generalized inversion technique[J]. Geophysical Journal International, 2018, 212(2): 872-890. doi: 10.1093/gji/ggx447 [21] 赵翠萍,陈章立,华卫,等. 中国大陆主要地震活动区中小地震震源参数研究[J]. 地球物理学报,2011,54(6): 1478-1489.ZHAO, Cuiping. , CHEN Zhangli, HUA Wei, et al. Study on source parameters of small to moderate earthquake in the main seismic active regions, China mainland, Chinese. Journal of Geophysics. 54(6): 1478-1489. [22] 任叶飞. 基于强震动记录的汶川地震场地效应研究[D]. 哈尔滨:中国地震局工程力学研究所,2014. [23] 李红光,冷崴. H/V谱比方法在强震记录应用中几个影响因素的初步研究[J]. 地震工程学报,2019,41(1): 169-176. doi: 10.3969/j.issn.1000-0844.2019.01.169LI Hongguang, LENG Wei. Preliminary study on the influencing factors of the horizontal-to-vertical spectral ratio applied in strong motion[J]. China Earthquake Engineering Journal, 2019, 41(1): 169-176. doi: 10.3969/j.issn.1000-0844.2019.01.169 [24] RONG M S, FU L Y, WANG Z M, et al. On the amplitude discrepancy of HVSR and site amplification from strong-motion observations[J]. Bulletin of the Seismological Society of America, 2017, 107(6): 2873-2884. doi: 10.1785/0120170118 [25] PAROLAI S. The importance of converted waves in comparing H/V and RSM site response estimates[J]. Bulletin of the Seismological Society of America, 2004, 94(1): 304-313. doi: 10.1785/0120030013 -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 590
- HTML全文浏览量: 239
- PDF下载量: 91
- 被引次数: 0