

Two-Stage Analysis Method for Influence of Foundation Pit Excavation on Adjacent Existing Roads
-
摘要:
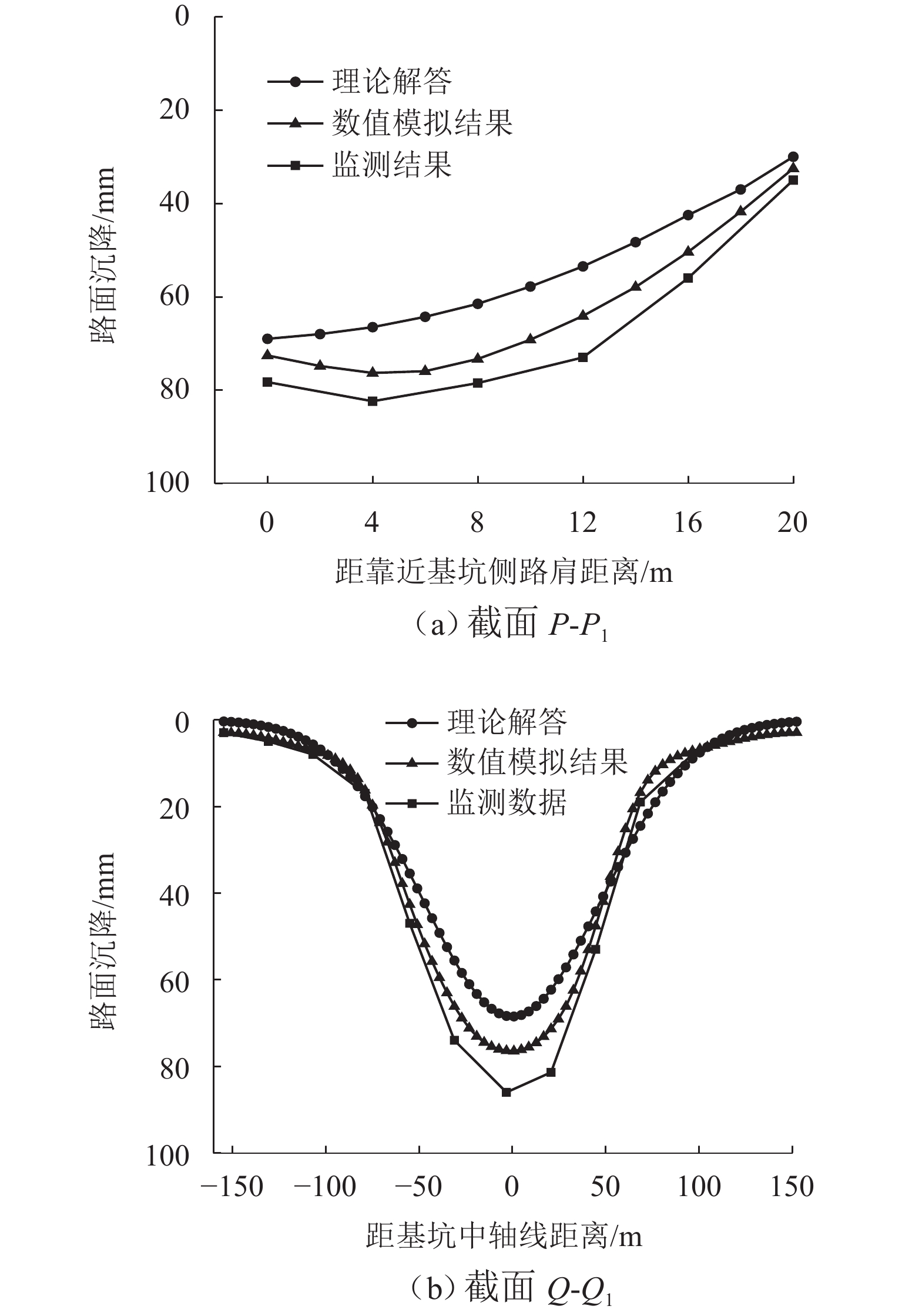
针对城市基坑开挖过程中邻近道路沉降开裂问题,基于Winkler理论,将研究对象从一维结构扩展到二维结构. 首先,建立道路在基坑开挖引起沉降场下的计算模型,推导出道路挠曲变形控制方程;其次,采用两阶段分析方法,考虑基坑开挖深度、宽长比、支护刚度以及坑底以上软土层厚度等因素,给出基坑开挖引起沉降场修正公式和地表最大沉降预测方法;接着,将沉降场代入道路挠曲变形控制方程,通过有限差分法求解四阶非线性偏微分方程;最后,通过工程实例对上述关于基坑开挖条件下道路计算分析模型进行验证. 现场监测数据与理论解、数值模拟结果比较发现:道路沉降的误差分别为15.0%和8.3%,均在合理范围内,确定本文所提出的基坑开挖条件下道路计算分析模型的可靠性.
-
关键词:
- 基坑开挖 /
- Winkler地基梁 /
- 土与结构相互作用 /
- 路面沉降
Abstract:To address the issue of settlement and cracking of adjacent roads during the excavation of urban foundation pits, the research object was extended from a one-dimensional structure to a two-dimensional structure based on the Winkler theory. Firstly, a calculation model for the settlement field caused by foundation pit excavation was established, and the control equation for road flexural deformation was derived. Secondly, a two-stage analysis method was adopted by considering factors of foundation pit excavation depth, aspect ratio, support stiffness, and thickness of soft soil layer above the pit bottom, so as to provide a correction formula for settlement field caused by foundation pit excavation and a method for predicting maximum surface settlement. Thirdly, the settlement field was substituted into the control equation for road flexural deformation, and a fourth-order nonlinear partial differential equation was solved by using the finite difference method. Finally, the above road calculation and analysis model under the condition of foundation pit excavation was verified by an engineering example. By comparing the field monitoring data with the theoretical solution and numerical simulation, it was found that the errors in road settlement were 15% and 8.3%, respectively, both of which are within acceptable limits, thereby confirming the reliability of the road calculation and analysis model proposed in this study under the condition of foundation pit excavation.
-
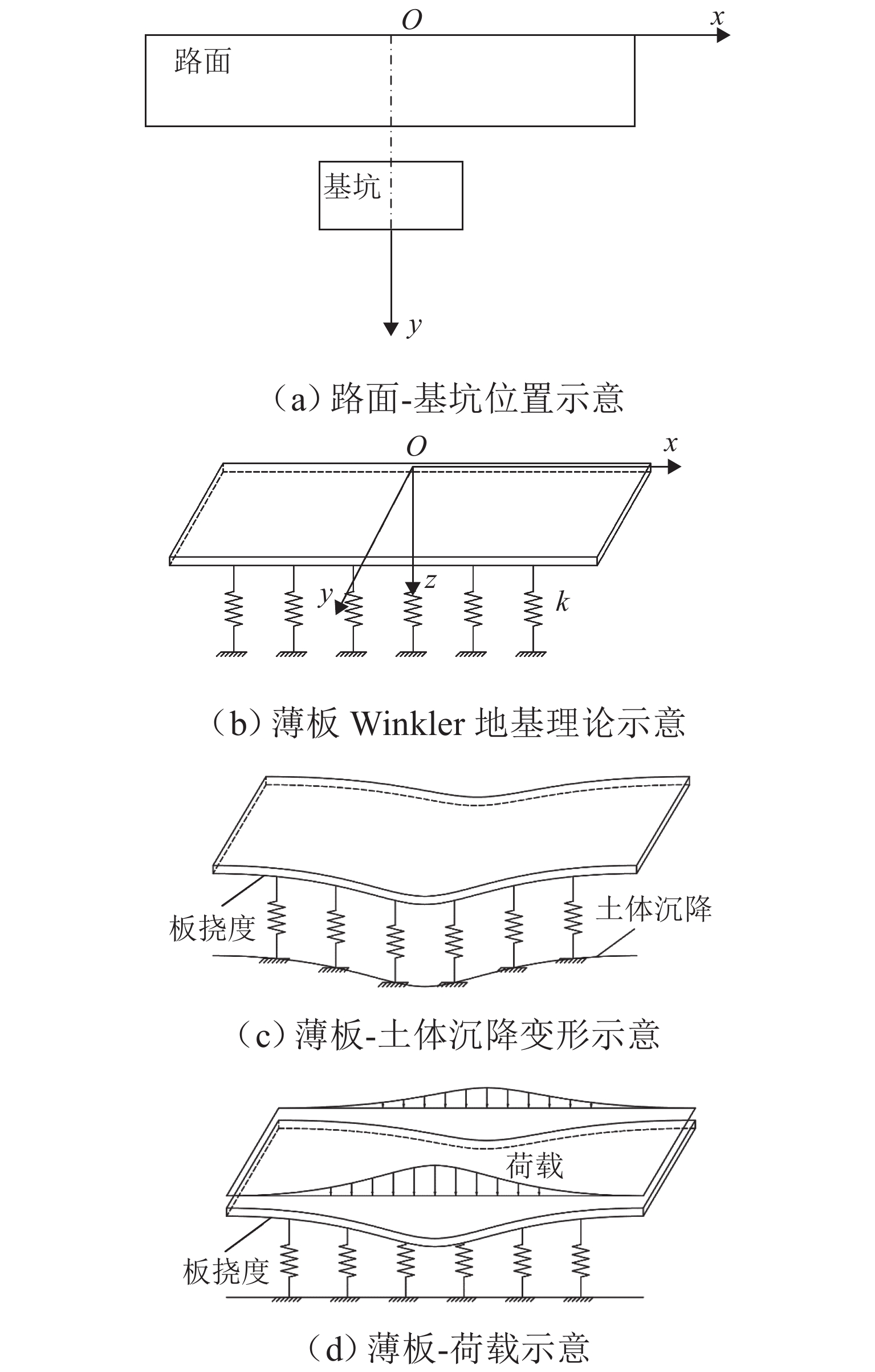
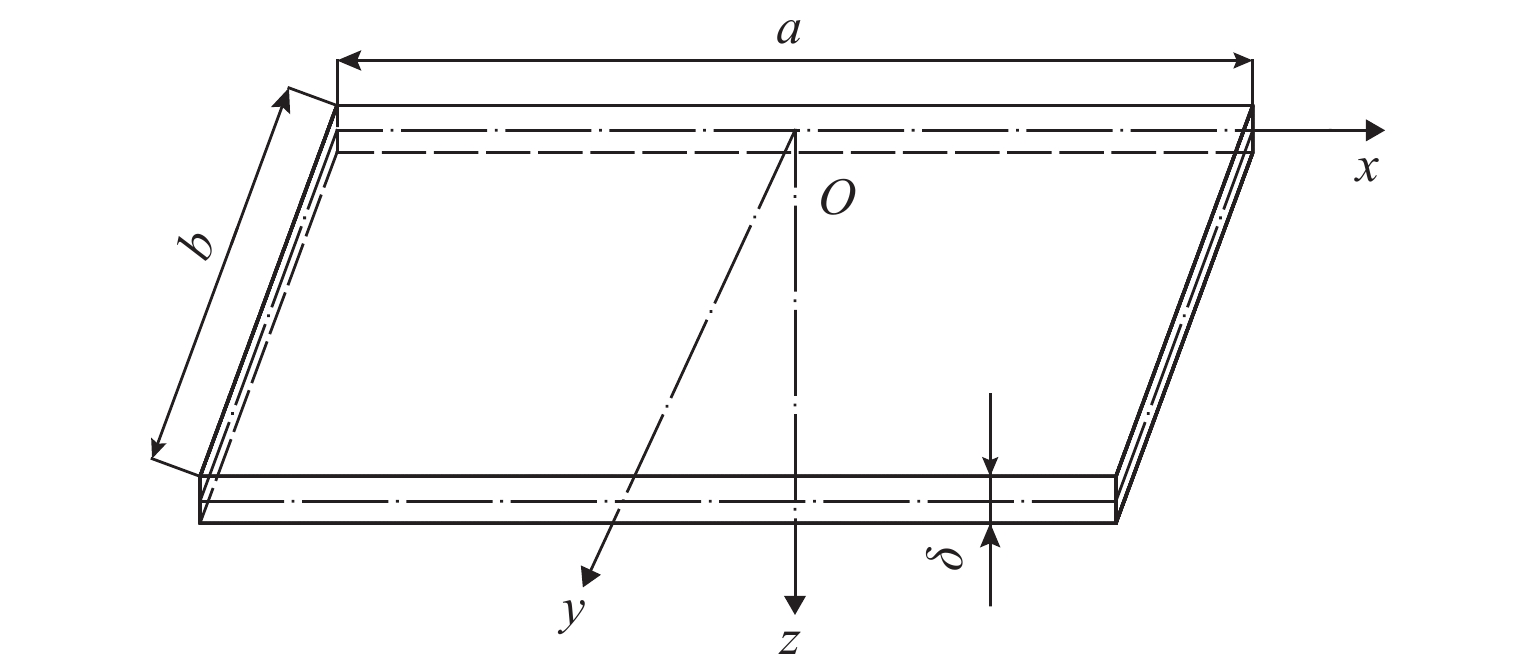
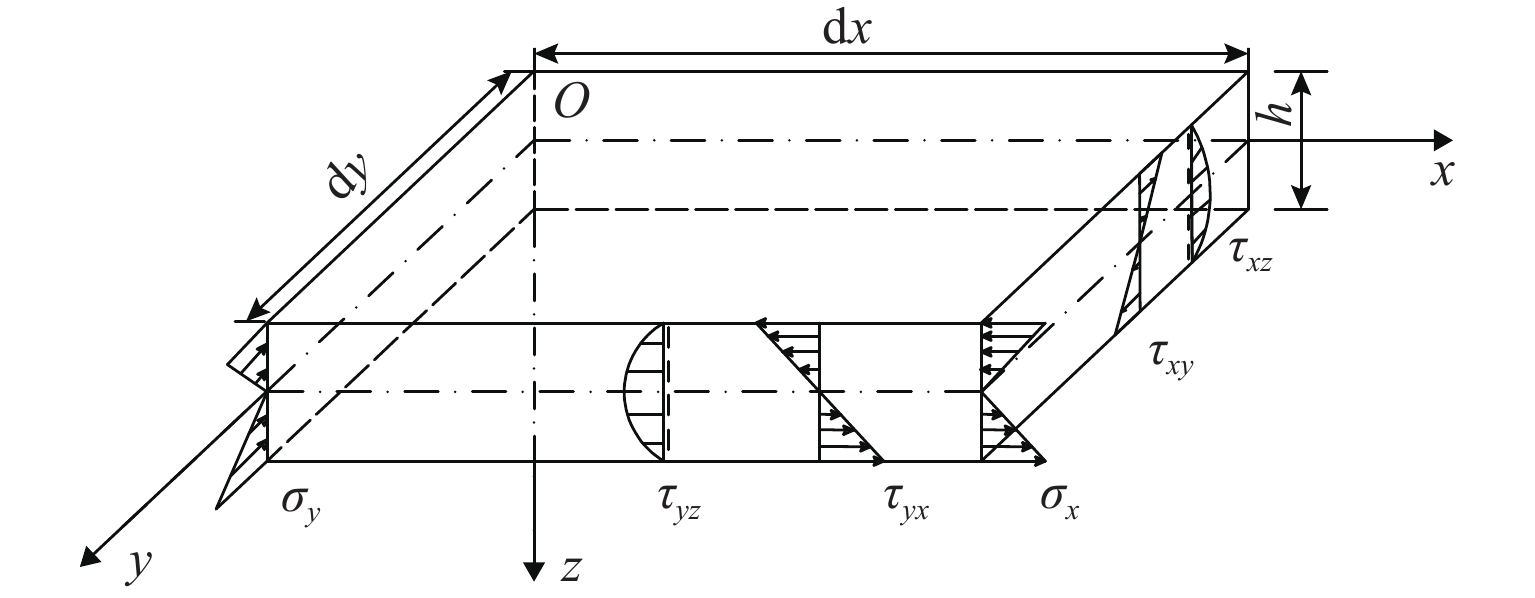
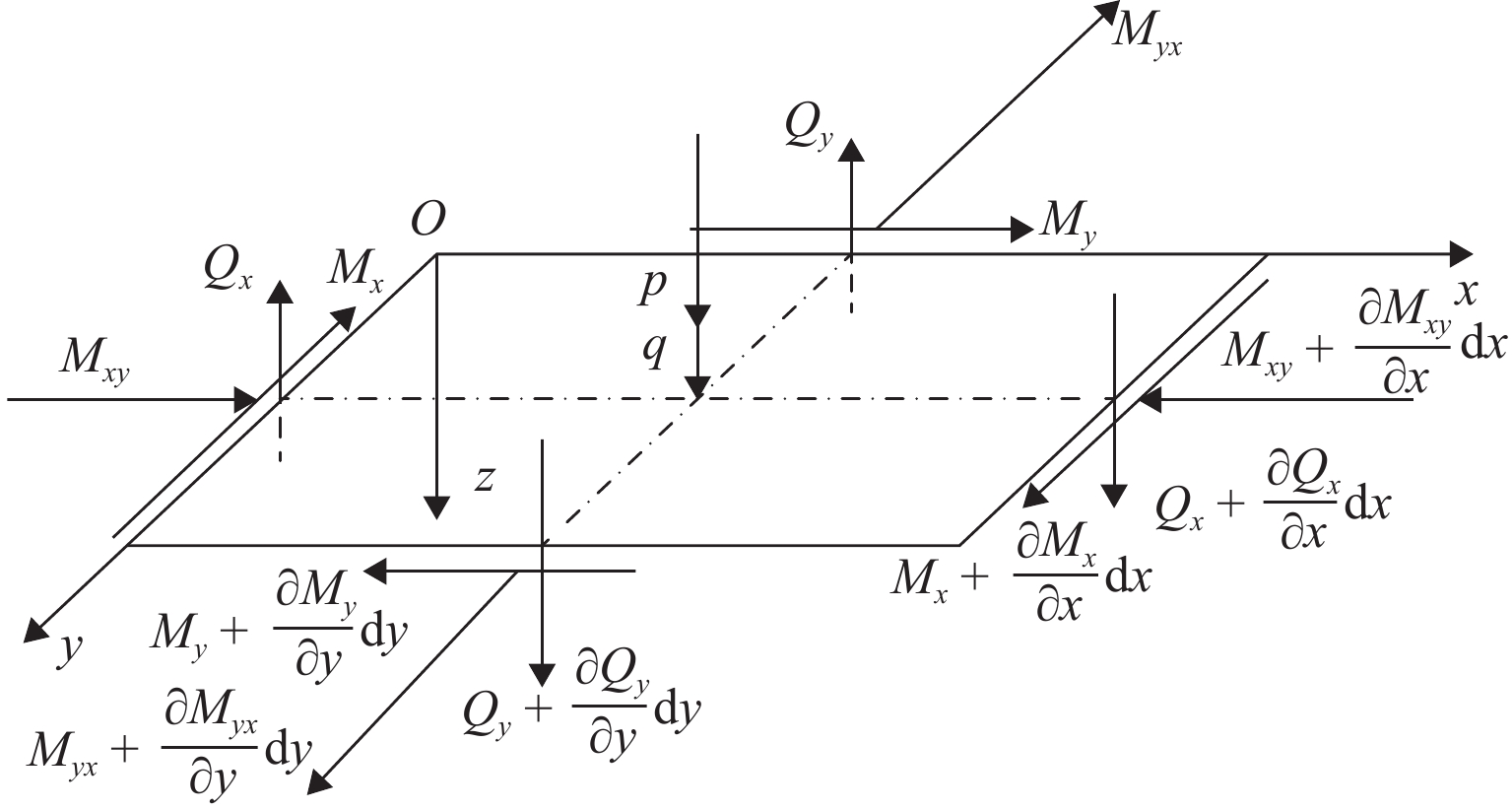
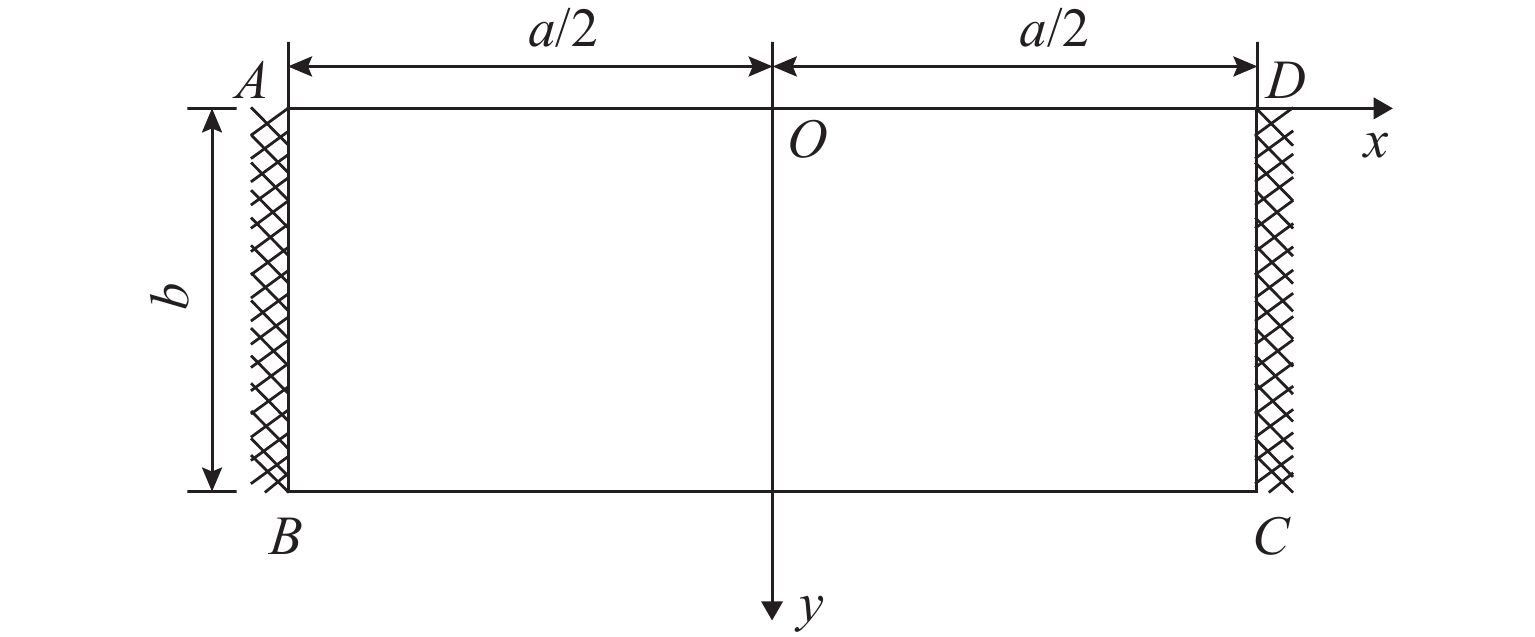
图 1 基坑开挖下道路-土相互作用模型
Figure 1. Road-soil interaction model under foundation pit excavation
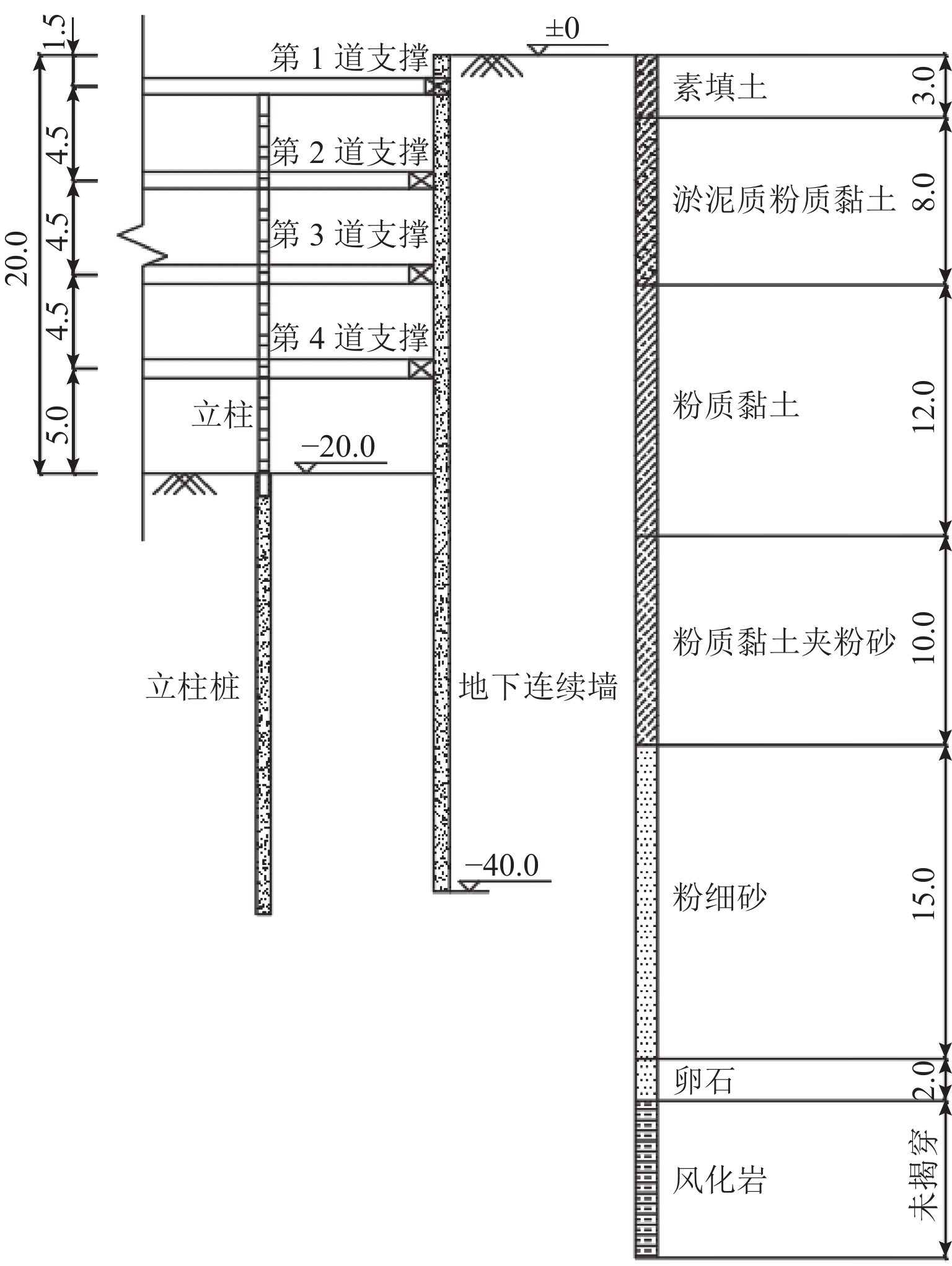
图 6 基本模型基坑支护结构剖面图(单位:m)
Figure 6. Sectional drawing of foundation pit support structure in basic model (unit: m)
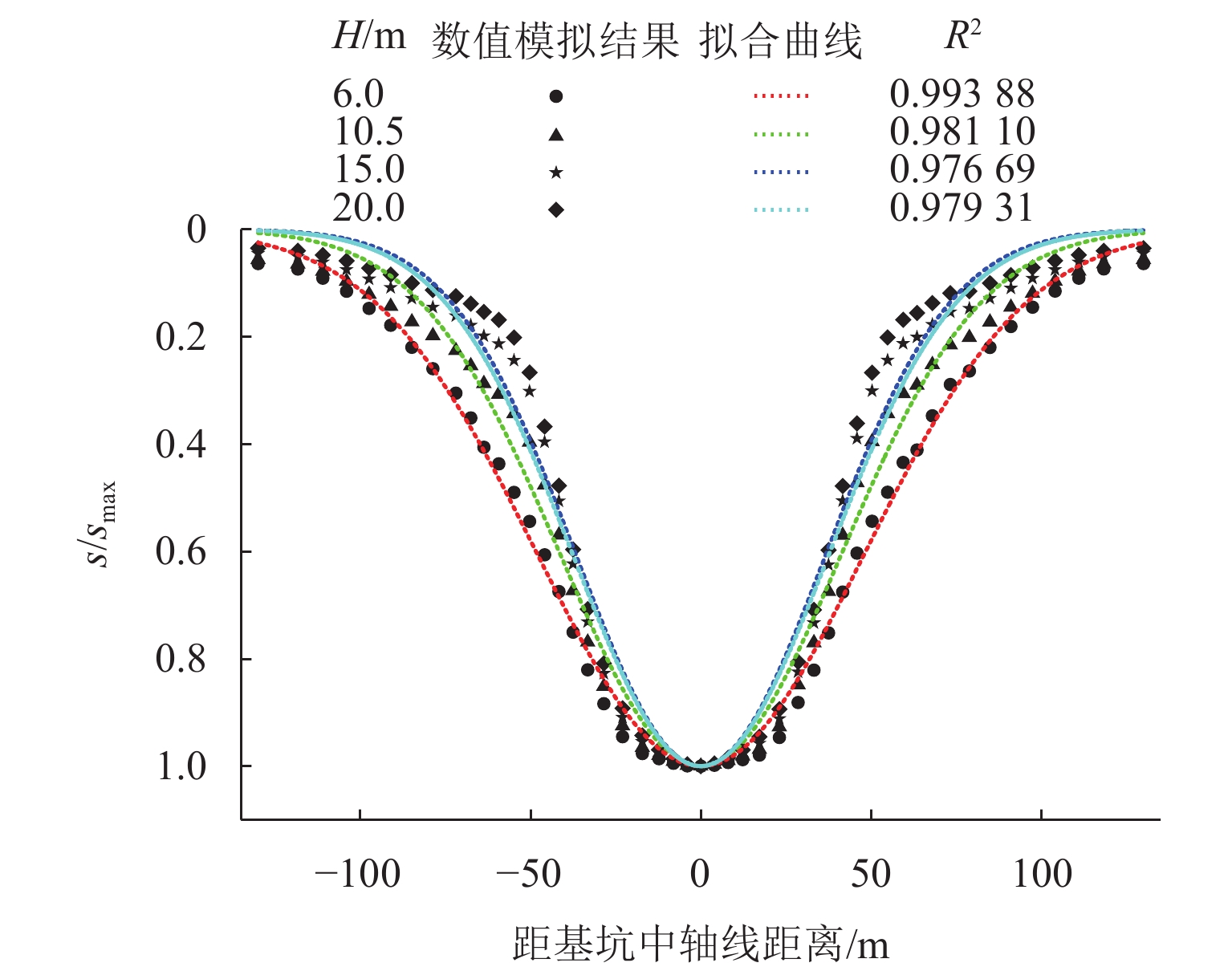
图 7 地表沉降沿基坑长度方向的沉降分布曲线
Figure 7. Distribution curves of surface settlement along length of foundation pit
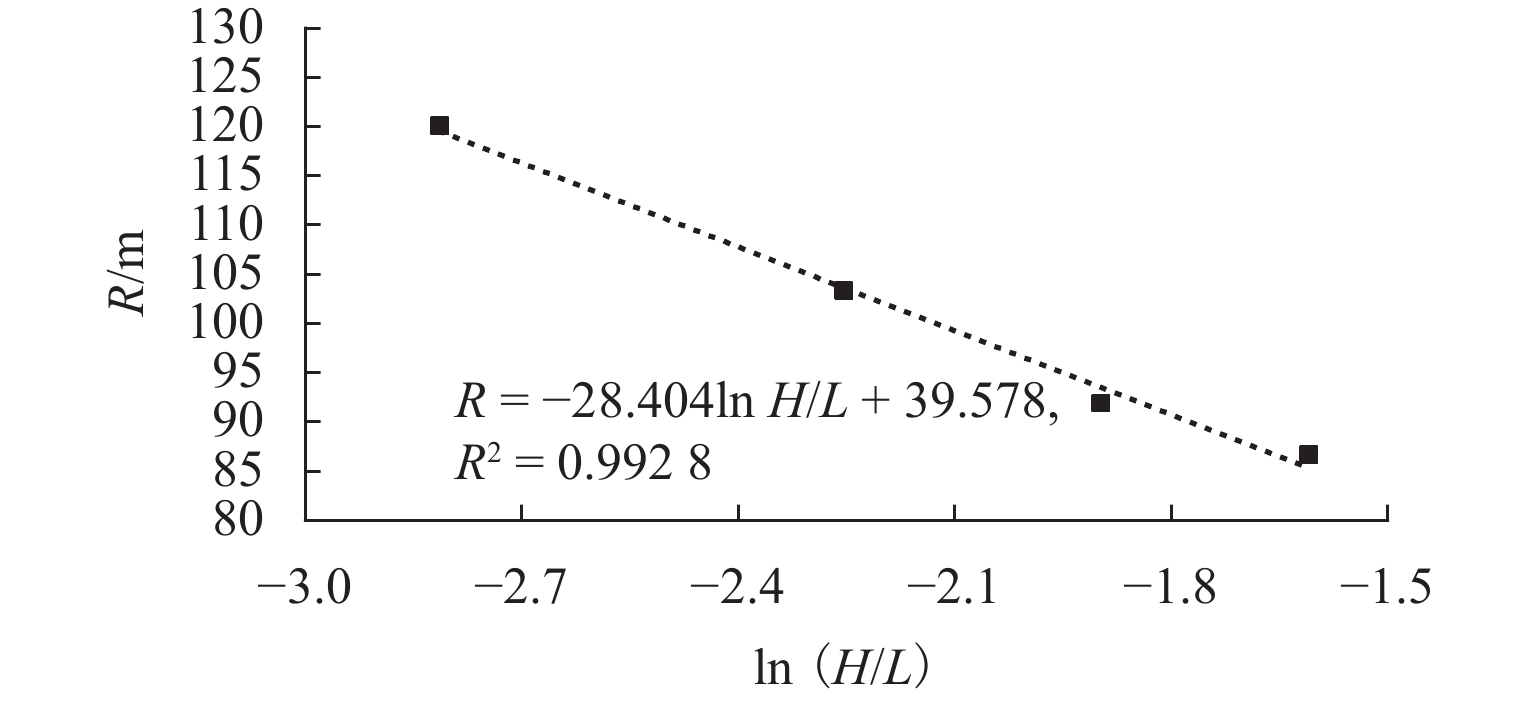
图 8 拟合系数与基坑开挖深度关系
Figure 8. Relationship between fitting coefficient and excavation depth of foundation pit
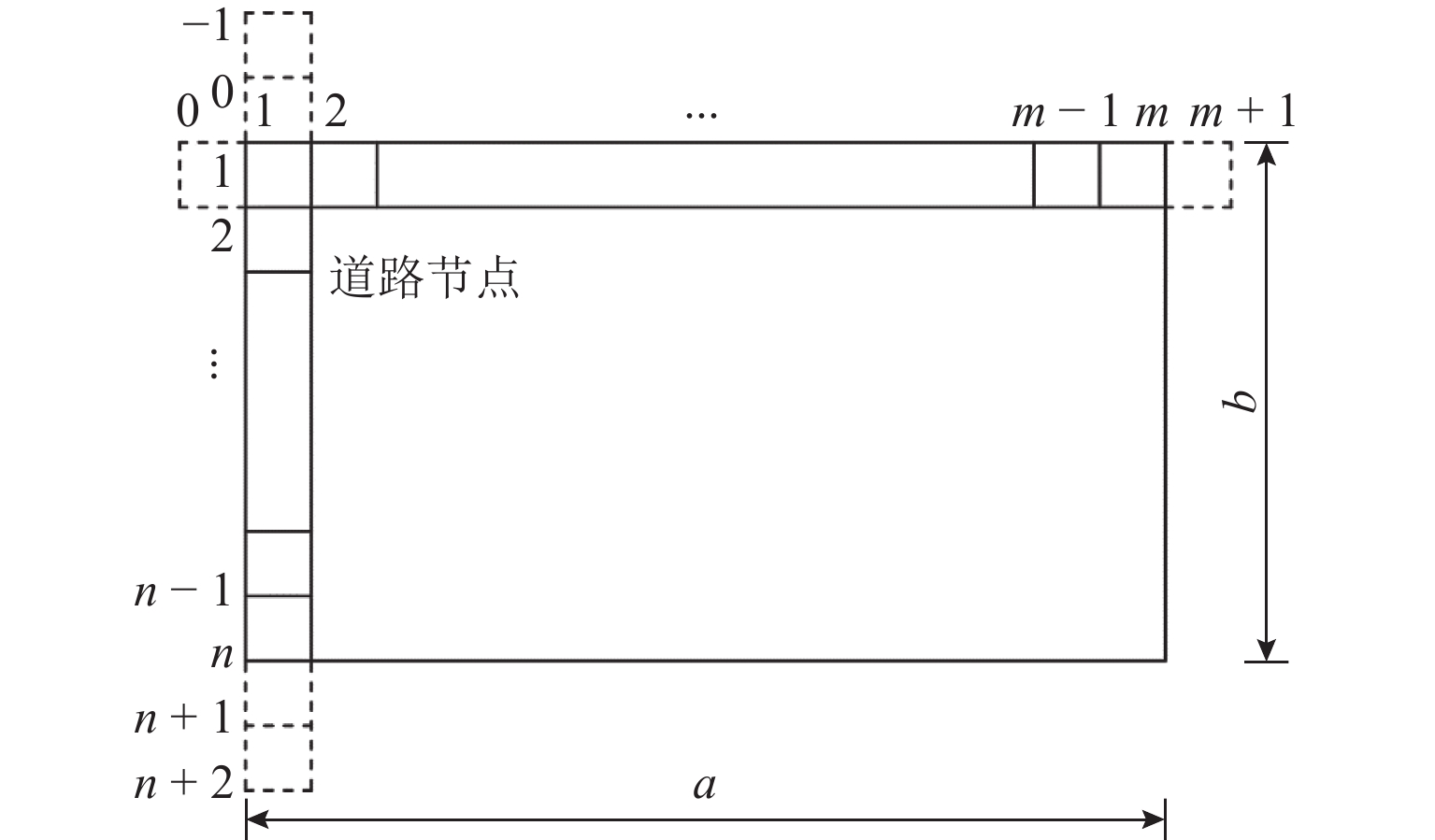
图 10 限差分法道路节点划分示意
Figure 10. Schematic diagram of road node division by limited difference method

图 12 基坑支护结构剖面图(单位:m)
Figure 12. Sectional drawing of foundation pit support structure (unit: m)
表 1 修正莫尔-库伦模型参数
Table 1. Modified Mohr-Coulomb model parameters
土层名称 γ/(kN•m−3) φ/(°) c/kPa $\mu $ e0 Es/MPa Eoed/MPa E50/MPa Eur/MPa 素填土 18.4 13.6 11.1 0.33 0.914 4.41 4.41 4.41 22.05 淤泥质粉质黏土 17.7 11.8 8.4 0.40 1.100 3.37 3.37 6.74 33.70 粉质黏土夹粉土 17.8 16.4 10.4 0.35 0.953 4.20 4.20 8.20 41.00 粉土夹粉砂 18.5 23.3 8.5 0.31 0.812 6.56 6.56 6.56 32.80 粉细砂 18.5 32.3 2.0 0.27 0.745 10.05 10.05 10.05 50.25 卵石 20.0 35.0 30.0 0.25 0.650 15.00 15.00 15.00 75.00 风化岩 21.0 35.0 30.0 0.25 0.600 30.00 30.00 20.00 100.00 注:γ为土体重度,φ为土体内摩擦角,c为土体黏聚力,e0为初始孔隙比,Es为土体压缩模量,Eoed为固结试验的参考切线模量,E50为三轴排水剪切试验的参考割线模量,Eur为三轴排水剪切试验的参考加卸载模量;Es、Eoed、E50、Eur之间存在经验关系[23-24].  下载: 导出CSV
下载: 导出CSV
表 2 支护刚度取值
Table 2. Values of support stiffness
t/m EI/kPa have/m 支撑层数/层 K 0.6 540 6.0 3 40 0.8 1280 6.0 3 100 0.8 1280 4.5 4 310 0.8 1280 4.0 5 500 1.0 2500 4.0 5 975
下载: 导出CSV
表 3 影响因素值
Table 3. Values of influencing factors
K (log K) B/L D/m H/m 40 (1.60) 0.3 0 1.5 100 (2.00) 0.5 4 6.0 310 (2.49) 0.7 8 10.5 500 (2.70) 0.9 12 15.0 975 (2.99) 16 20.0
下载: 导出CSV
表 4 地表最大沉降预测参数
Table 4. Prediction parameters of maximum surface settlement
名称 H/m D/m B/L K 取值 19.75 6.9 0.6 370
下载: 导出CSV
-
[1] 余苑航,阎波. 我国超大城市地下空间开发现状及其发展趋势[J]. 地下空间与工程学报,2021,17(增1): 1-7.YU Yuanhang, YAN Bo. Present situation and development trend of underground space in megacity in China[J]. Chinese Journal of Underground Space and Engineering, 2021, 17(S1): 1-7. [2] 陈志龙. 中国岩石力学与工程学会地下空间分会//2020中国城市地下空间发展蓝皮书[M]. 南京:科学出版社,2020. [3] 程康,徐日庆,应宏伟,等. 杭州软黏土地区某30.2 m深大基坑开挖性状实测分析[J]. 岩石力学与工程学报,2021,40(4): 851-863.CHENG Kang, XU Riqing, YING Hongwei, et al. Performance analysis of a 30.2 m deep-large excavation in Hangzhou soft clay[J]. Chinese Journal of Rock Mechanics and Engineering, 2021, 40(4): 851-863. [4] 董利虎,宋丹青,唐高杰,等. 超大深基坑开挖对周围环境变形影响及对策分析[J]. 水资源与水工程学报,2022,33(1): 199-205,224. doi: 10.11705/j.issn.1672-643X.2022.01.28DONG Lihu, SONG Danqing, TANG Gaojie, et al. Influence of super-large deep foundation pit excavation on the deformation of surrounding environment and countermeasures[J]. Journal of Water Resources and Water Engineering, 2022, 33(1): 199-205,224. doi: 10.11705/j.issn.1672-643X.2022.01.28 [5] 陈云敏,胡琦,陈仁朋. 杭州地铁湘湖车站基坑坍塌引起的基底土深层扰动与沉降分析[J]. 土木工程学报,2014,47(7): 110-117.CHEN Yunmin, HU Qi, CHEN Renpeng. Soil disturbance by the collapse of retaining wall for a pit excavation and the induced additional settlement: a case study of Hangzhou Metro Xianghu Station[J]. China Civil Engineering Journal, 2014, 47(7): 110-117. [6] 周鹏,李凯. 城市建成区建筑基坑开挖对周边道路的影响及其时空特征研究[J]. 测绘通报,2021(增2): 136-139,144.ZHOU Peng, LI Kai. On the settlement monitoring of super high-rise building in the mountainous city and relevant data analysis[J]. Bulletin of Surveying and Mapping, 2021(S2): 136-139,144. [7] 闫周福. 软土地区深基坑开挖对围护结构及其周边环境影响的研究[D]. 重庆:重庆大学,2009. [8] 方浩. 软土地区基坑开挖对邻近高铁路基变形影响及保护距离研究[D]. 南京:东南大学,2017. [9] 雷华阳,冯双喜,万勇峰,等. 基坑开挖对既有临近滩涂铁路路基影响规律及安全措施研究[J]. 天津大学学报(自然科学与工程技术版),2019,52(9): 969-978.LEI Huayang, FENG Shuangxi, WAN Yongfeng, et al. Influence law and safety measures of foundation pit excavation on existing railway subgrade in tidal flat areas[J]. Journal of Tianjin University (Science and Technology), 2019, 52(9): 969-978. [10] 储成伍. 深基坑开挖对邻近铁路路基变形的影响[J]. 铁道建筑,2021,61(3): 83-86,102. doi: 10.3969/j.issn.1003-1995.2021.03.19CHU Chengwu. Influence of deep foundation pit excavation on adjacent railway subgrade deformation[J]. Railway Engineering, 2021, 61(3): 83-86,102. doi: 10.3969/j.issn.1003-1995.2021.03.19 [11] 张治国,黄茂松,王卫东. 邻近开挖对既有软土隧道的影响[J]. 岩土力学,2009,30(5): 1373-1380. doi: 10.3969/j.issn.1000-7598.2009.05.033ZHANG Zhiguo, HUANG Maosong, WANG Weidong. Responses of existing tunnels induced by adjacent excavation in soft soils[J]. Rock and Soil Mechanics, 2009, 30(5): 1373-1380. doi: 10.3969/j.issn.1000-7598.2009.05.033 [12] WINKLER E. Die lehre von der elasticitaet und festigkeit: mit besonderer rücksicht auf ihre anwendung in der technik, für polytechnische schulen, bauakademien, ingenieure, maschinenbauer, architecten, etc[M]. Prag: [s.n.], 1867. [13] POULOS H G, CHEN L T. Pile response due to excavation-induced lateral soil movement[J]. Journal of Geotechnical and Geoenvironmental Engineering, 1997, 123(2): 94-99. doi: 10.1061/(ASCE)1090-0241(1997)123:2(94) [14] KLAR A, VORSTER T E B, SOGA K, et al. Soil—pipe interaction due to tunnelling: comparison between Winkler and elastic continuum solutions[J]. Géotechnique, 2005, 55(6): 461-466. [15] VORSTER T E, KLAR A, SOGA K, et al. Estimating the effects of tunneling on existing pipelines[J]. Journal of Geotechnical and Geoenvironmental Engineering, 2005, 131(11): 1399-1410. doi: 10.1061/(ASCE)1090-0241(2005)131:11(1399) [16] RALPH PECK B. Deep excavation and tunneling in soft ground. state-of-the-art report[C]//Proceedings of the 7th International Conference on Soil Mechanics and Foundation Engineering. Mexico: [s.n.], 1969: 225-290. [17] 张坤勇,王宇,艾英钵. 任意荷载下管土相互作用解答[J]. 岩土工程学报,2010,32(8): 1189-1193.ZHANG Kunyong, WANG Yu, AI Yingbo. Analytical solution to interaction between pipelines and soils under arbitrary loads[J]. Chinese Journal of Geotechnical Engineering, 2010, 32(8): 1189-1193. [18] 黄义,何芳社. 弹性地基上的梁、板、壳[M]. 北京:科学出版社,2005. [19] 张陈蓉,蔡建鹏,黄茂松. 基坑开挖对邻近地埋管线的影响分析[J]. 岩土工程学报,2010,32(增2): 154-157.ZHANG Chenrong, CAI Jianpeng, HUANG Maosong. Influence of deep excavation on adjacent underground pipelines[J]. Chinese Journal of Geotechnical Engineering, 2010, 32(S2): 154-157. [20] 朱晓宇,黄茂松,张陈蓉. 基坑开挖对邻近桩基础影响分析的DCFEM法[J]. 岩土工程学报,2010,32(增1): 181-185.ZHU Xiaoyu, HUANG Maosong, Zhang Chenrong. Displacement-controlled FEM for analyzing influences of excavation of foundation pits on adjacent pile foundations[J]. Chinese Journal of Geotechnical Engineering, 2010, 32(S1): 181-185. [21] 唐孟雄,赵锡宏. 深基坑周围地表任意点移动变形计算及应用[J]. 同济大学学报(自然科学版),1996,24(3): 238-244.TANG Mengxiong, ZHAO Xihong. Ground setttement and deformation calculation and application in deep excavation[J]. Journal of Tongji University (Natural Science), 1996, 24(3): 238-244. [22] HSIEH P G, OU C Y. Shape of ground surface settlement profiles caused by excavation[J]. Canadian Geotechnical Journal, 1998, 35(6): 1004-1017. [23] 陈博浪. 软土地基多道支撑基坑稳定性的强度参数折减有限元分析[D]. 杭州:浙江大学,2011. [24] 方晨昱. 杭州某地铁端头井基坑变形分析[D]. 杭州:浙江工业大学,2015. -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 530
- HTML全文浏览量: 111
- PDF下载量: 66
- 被引次数: 0