

Modeling and Characteristic Analysis of a Magnetic Spring with High Static Stiffness and Low Dynamic Stiffness
-
摘要:
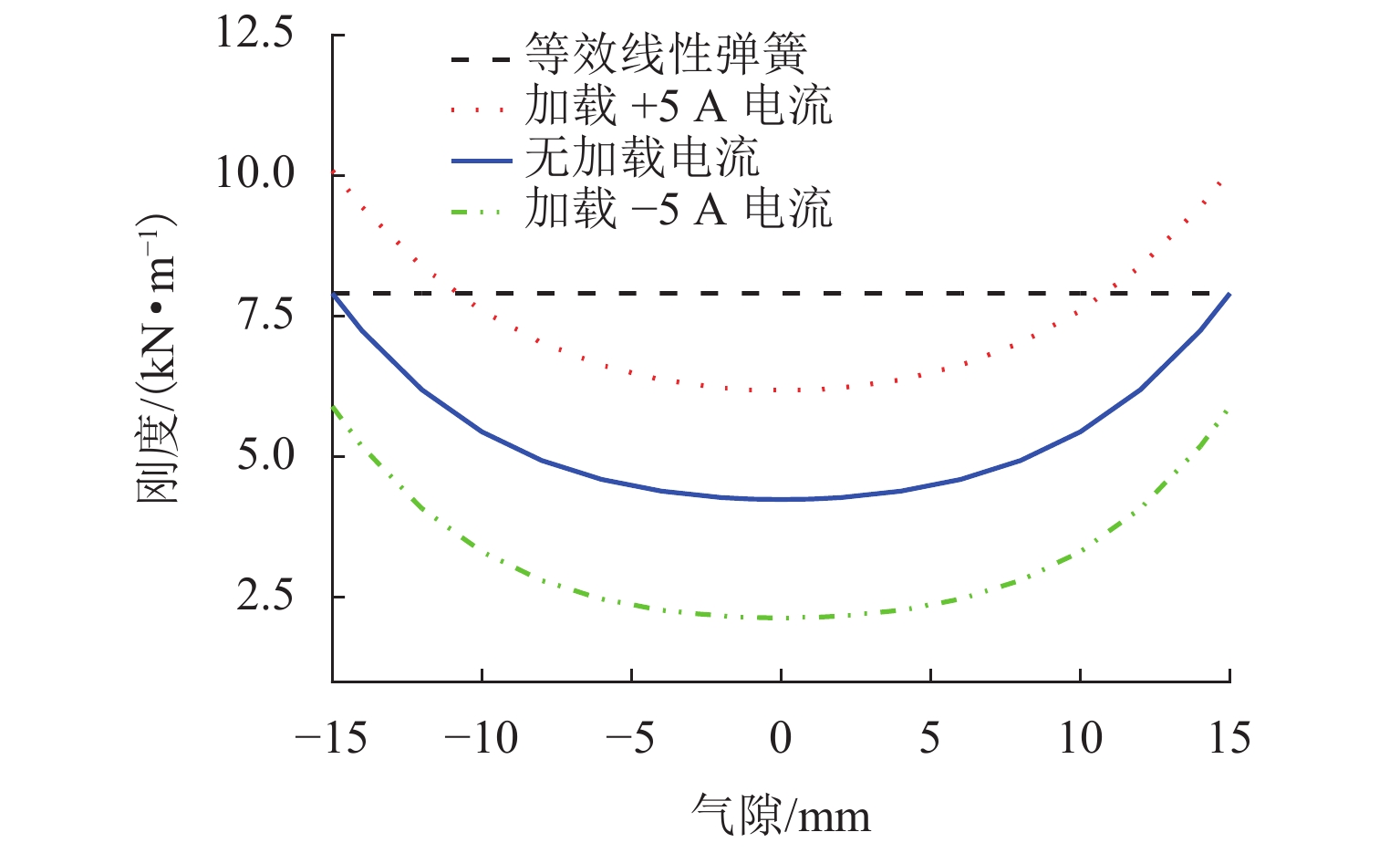
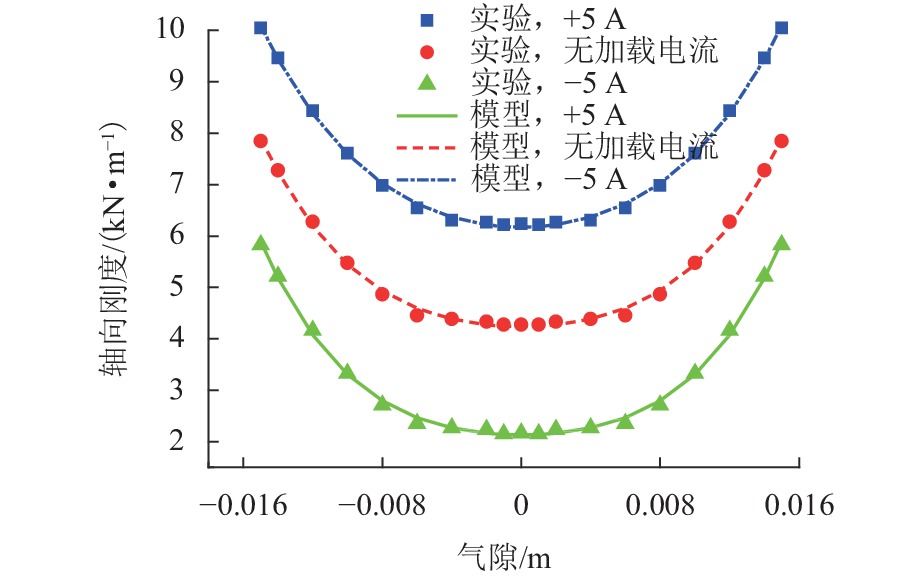
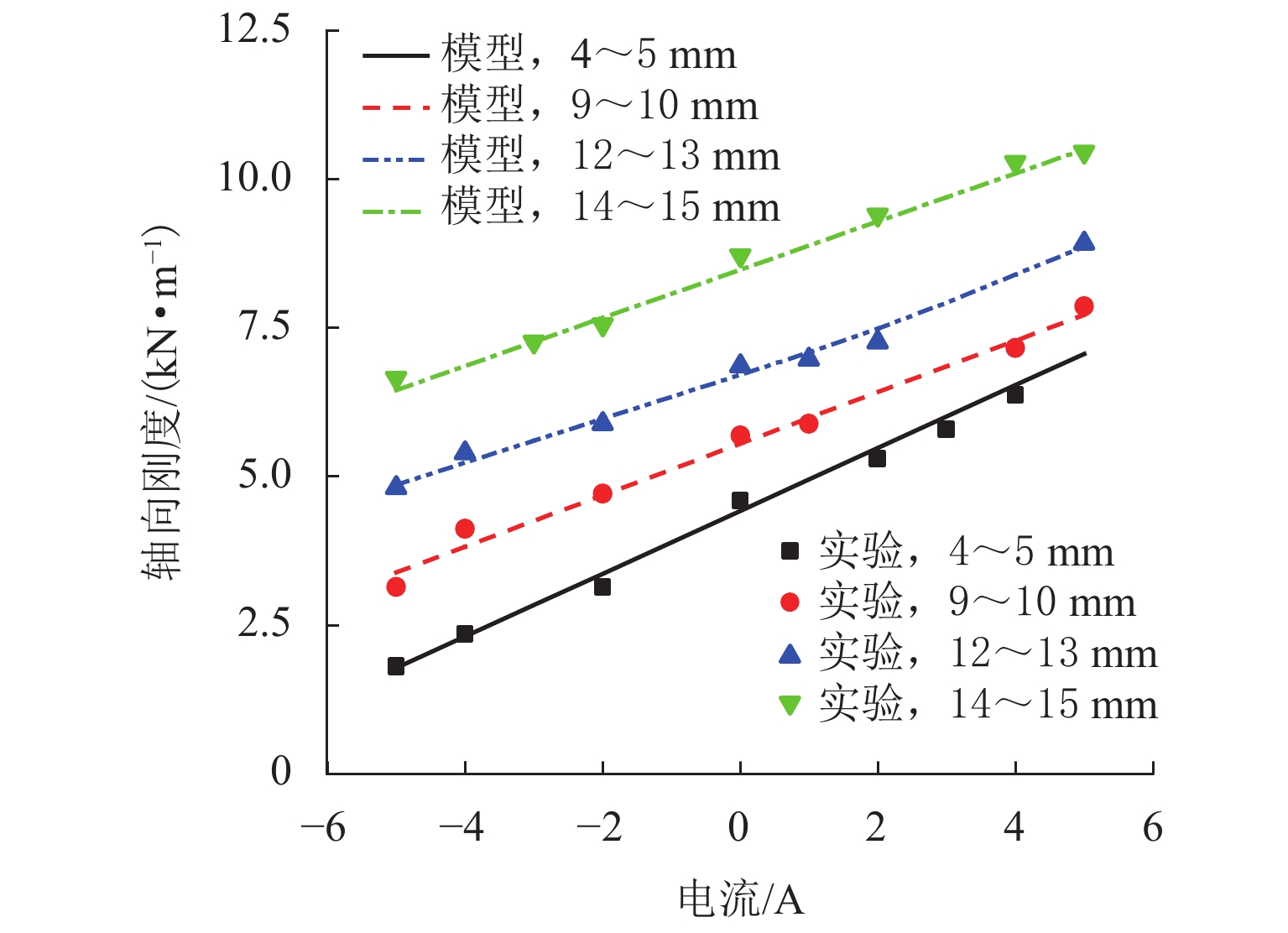
为解决低频隔振领域存在的低固有频率和高承载力之间的矛盾,设计了一种新型高静-低动刚度磁弹簧元件. 首先,基于电磁场理论和分子电流法建立磁弹簧的弹簧力和刚度模型;其次,建立系统的动力学模型,同时分析线圈通入不同电流时对位移传递率的影响,并与等效线性弹簧进行比较;最后,研制实验样机并进行实验研究. 仿真与实验结果表明:磁弹簧气隙-刚度曲线呈先平缓后急剧的非线性关系,具有明显的高静-低动刚度特性;其刚度与电流近似线性关系,磁弹簧可通过改变电流实现较大范围的刚度调整,且刚度响应迅速;在未通入电流时,相对于等效线性弹簧,起始隔振频率和传递率峰值降低26%,在通入负向额定电流时,起始隔振频率和传递率峰值降低了41%.
Abstract:A novel magnetic spring element with high static stiffness and low dynamic stiffness was designed to address the conflict between low natural frequency and high bearing capacity in the field of low-frequency vibration isolation. First, the spring force and stiffness models of the magnetic spring were built based on electromagnetic field theory and molecular current method; secondly, the dynamics model of the system was established, and the influence of coils with different currents on displacement transmissibility was analyzed and compared with the equivalent linear spring; finally, an experimental prototype was developed, and an experimental study was carried out. The simulation and experimental results show that the air-gap stiffness curve of the magnetic spring presents a nonlinear relationship of being initially flat and then sharp, which indicates obvious characteristics of high static stiffness and low dynamic stiffness. The stiffness is approximately linear with the current. The magnetic spring can achieve a wide range of stiffness adjustment by changing the current, and the stiffness response is rapid; when no current is applied, the starting vibration isolation frequency and peak transmissibility are decreased by 26% compared with the equivalent linear spring. When a negative rated current is applied, the starting vibration isolation frequency and peak transmissibility are reduced by 41%.
-

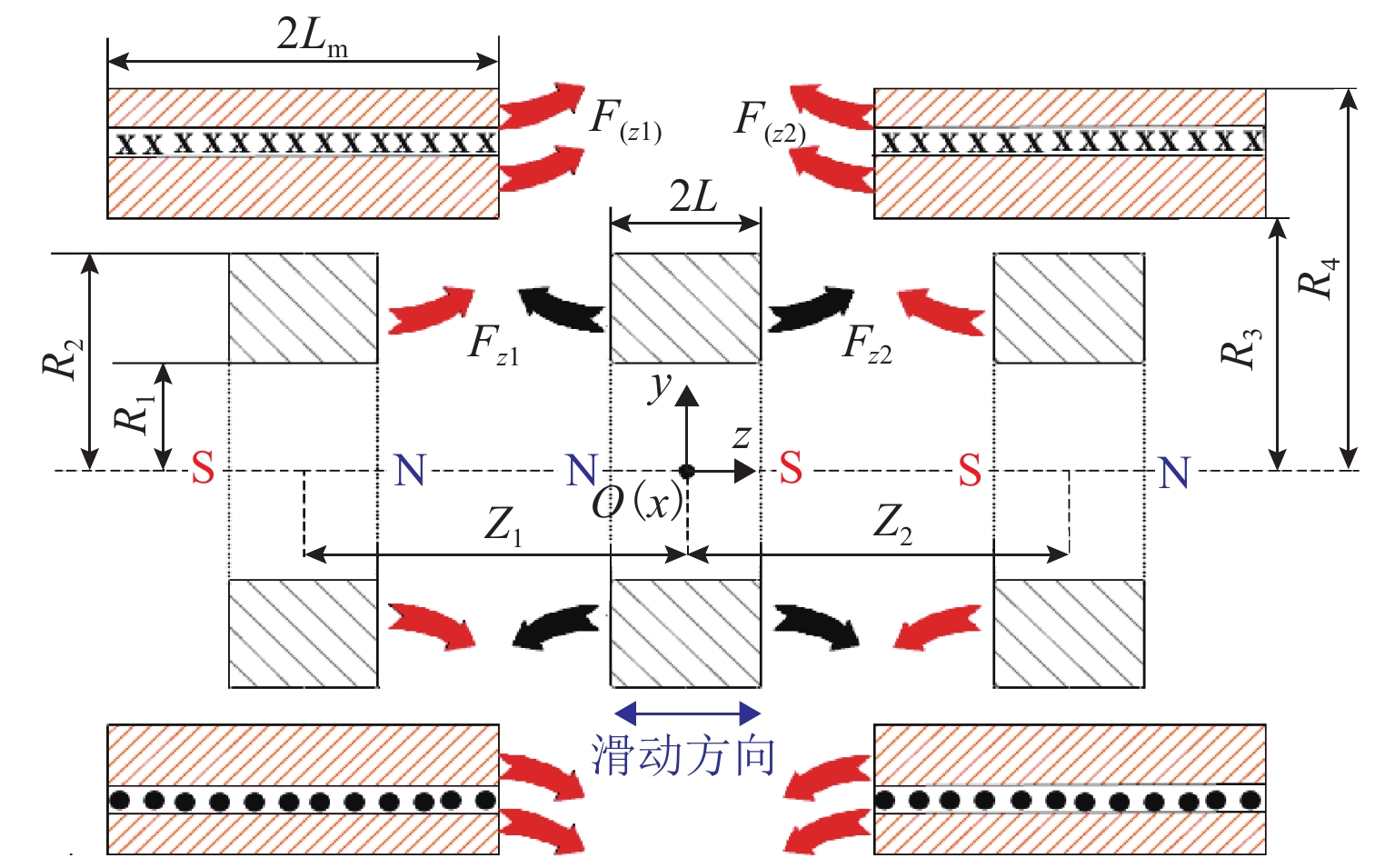
图 1 高静-低动刚度磁弹簧示意
Figure 1. Magnetic spring with high static stiffness and low dynamic stiffness
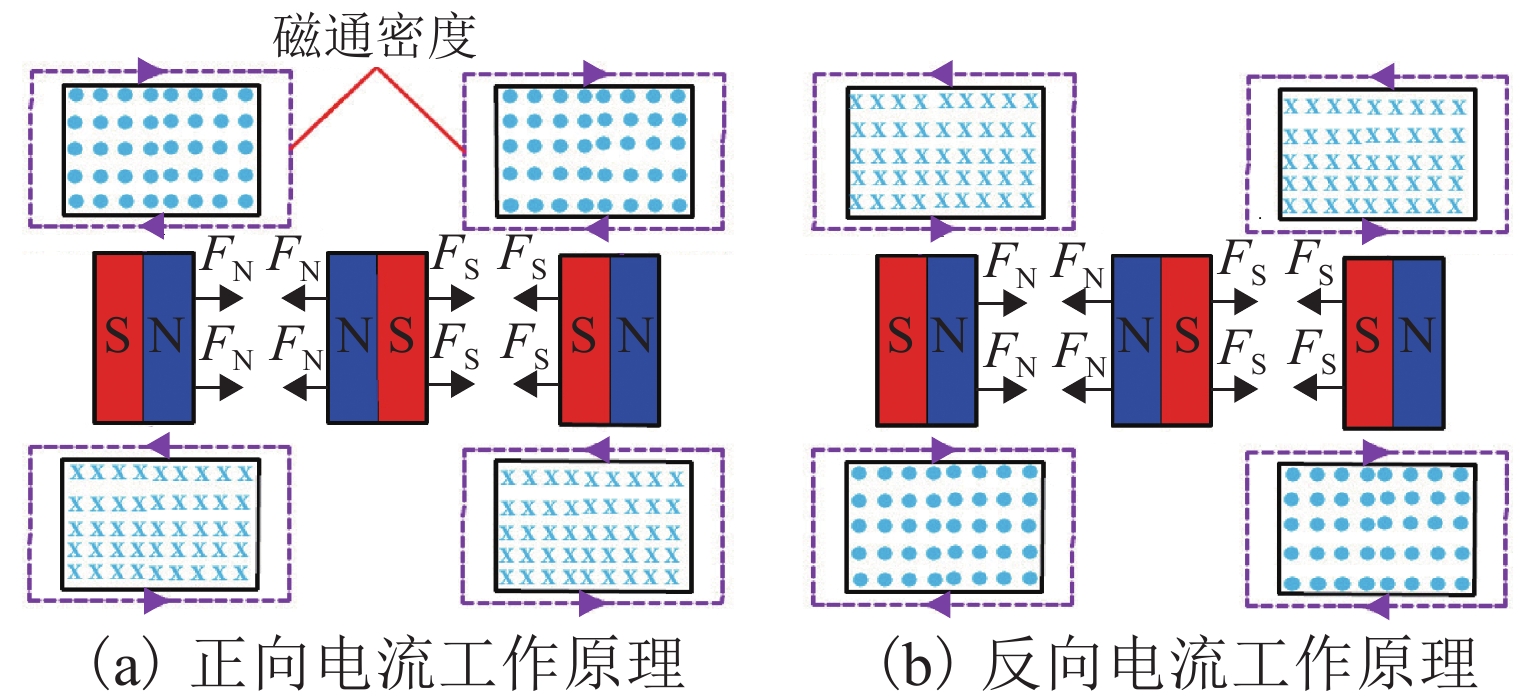
图 2 高静-低动刚度磁弹簧工作原理
Figure 2. Working principle of magnetic spring with high static stiffness and low dynamic stiffness
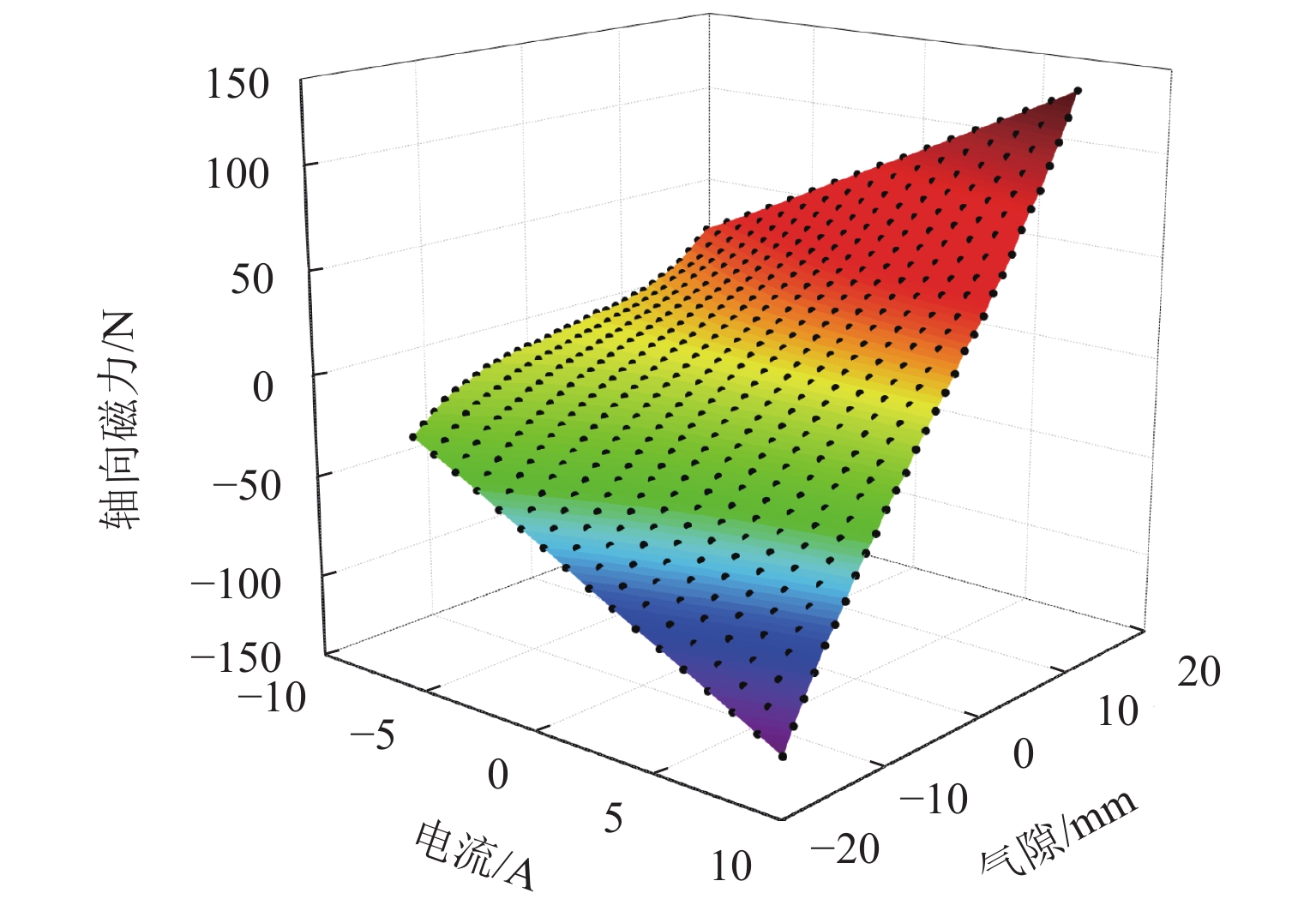
图 5 磁力理论计算与实验测量对比
Figure 5. Comparison of theoretically calculated magnetic force and experimentally measured magnetic force

图 10 轴向磁力与轴向气隙的关系
Figure 10. Relationship between axial magnetic force and axial air gap
表 1 高静-低动刚度磁弹簧结构参数
Table 1. Structural parameters of magnetic spring with high static stiffness and low dynamic stiffness
mm 参数 R1 R2 Zd1 Zd2 2L R3 R4 2Lm 数值 15 30 15 15 20 35 52 52  下载: 导出CSV
下载: 导出CSV
-
[1] 刘尚举,晏巨,陈虬. 电磁永磁混合悬浮隔振系统控制研究[J]. 西南交通大学学报,1999,34(3): 279-283. doi: 10.3969/j.issn.0258-2724.1999.03.006LIU Shangju, YAN Ju, CHEN Qiu. Study of controlling of an electromagnet and permanent magnet suspension isolation system[J]. Journal of Southwest Jiaotong University, 1999, 34(3): 279-283. doi: 10.3969/j.issn.0258-2724.1999.03.006 [2] 韩俊淑,孙景工,孟令帅. 一种曲面-弹簧-滚子机构的非线性隔振器特性分析[J]. 振动与冲击,2019,38(3): 170-178. doi: 10.13465/j.cnki.jvs.2019.03.024HAN Junshu, SUN Jinggong, MENG Lingshuai. Design and characteristics analysis of a nonlinear vibration isolator using a curved surface-spring-roller mechanism as negative stiffness element[J]. Journal of Vibration and Shock, 2019, 38(3): 170-178. doi: 10.13465/j.cnki.jvs.2019.03.024 [3] 赵川,孙凤,裴文哲,等. 永磁悬浮平台的分散串级控制方法[J]. 西南交通大学学报,2022,57(3): 618-626.ZHAO Chuan, SUN Feng, PEI Wenzhe, et al. Independent cascade control method for permanent magnetic levitation platform[J]. Journal of Southwest Jiaotong University, 2022, 57(3): 618-626. [4] 李爽,楼京俊,杨庆超,等. 双环永磁体型高静低动刚度隔振器设计、建模与试验研究[J]. 振动工程学报,2019,32(4): 675-684. doi: 10.16385/j.cnki.issn.1004-4523.2019.04.015LI Shuang, LOU Jingjun, YANG Qingchao, et al. Design and experiment of a vibration isolator using double-ring permanent magnets springs with negative stiffness[J]. Journal of Vibration Engineering, 2019, 32(4): 675-684. doi: 10.16385/j.cnki.issn.1004-4523.2019.04.015 [5] 高双,朱翔,谌宗琦,等. 基于欧拉梁的准零刚度隔振系统动力特性分析[J]. 中国机械工程,2016,27(21): 2869-2876. doi: 10.3969/j.issn.1004-132X.2016.21.006GAO Shuang, ZHU Xiang, SHEN Zongqi, et al. Analyses on dynamics characteristics of a quasi-zero-stiffness vibration isolation system based on Euler beam[J]. China Mechanical Engineering, 2016, 27(21): 2869-2876. doi: 10.3969/j.issn.1004-132X.2016.21.006 [6] CARRELLA A, BRENNAN M J, WATERS T P, et al. On the design of a high-static-low-dynamic stiffness isolator using linear mechanical springs and magnets[J]. Journal of Sound and Vibration, 2008, 315(3): 712-720. doi: 10.1016/j.jsv.2008.01.046 [7] ZHANG F, XU M L, SHAO S B, et al. A new high-static-low-dynamic stiffness vibration isolator based on magnetic negative stiffness mechanism employing variable reluctance stress[J]. Journal of Sound and Vibration, 2020, 476: 115322.1-115322.17 [8] ZHOU N, LIU K. A tunable high-static-low-dynamic stiffness vibration isolator[J]. Journal of Sound and Vibration, 2010, 329(9): 1254-1273. doi: 10.1016/j.jsv.2009.11.001 [9] 王迎春,柴凯,刘树勇,等. 永磁体型高静低动刚度隔振器试验研究[J]. 噪声与振动控制,2019,39(5): 223-230. doi: 10.3969/j.issn.1006-1355.2019.05.042WANG Yingchun, CHAI Kai, LIU Shuyong, et al. Experimental study on the permanent magnets vibration isolators with high-static and low-dynamic stiffness[J]. Noise and Vibration Control, 2019, 39(5): 223-230. doi: 10.3969/j.issn.1006-1355.2019.05.042 [10] ZHAO Y, YU J, WANG H, et al. Design of an electromagnetic prismatic joint with variable stiffness[J]. Industrial Robot, 2017, 44(2): 222-230. doi: 10.1108/IR-09-2016-0249 [11] EBRAHIMI B, KHAMESEE M B, GOLNARAGHI M F. Design and modeling of a magnetic shock absorber based on eddy current damping effect[J]. Journal of Sound and Vibration, 2008, 315(4/5): 875-889. [12] 曹琪,王皓,余觉. 基于电磁变刚度的力控制装置研究[J]. 机械设计与研究,2020,36(3): 170-175,181. doi: 10.13952/j.cnki.jofmdr.2020.0124CAO Qi, WANG Hao, YU Jue. Research on the force control device based on electromagnetic variable stiffness principle[J]. Machine Design & Research, 2020, 36(3): 170-175,181. doi: 10.13952/j.cnki.jofmdr.2020.0124 [13] 孟凯,顾勇,刘豫喜,等. 基于可控电磁负刚度的半主动隔振器传递率特性研究[J]. 振动与冲击,2022,41(7): 228-234. doi: 10.13465/j.cnki.jvs.2022.07.030MENG Kai, GU Yong, LIU Yuxi, et al. Transmissibility characteristics of semi-active vibration isolator based on controllable electro-magnetic negative stiffness[J]. Journal of Vibration and Shock, 2022, 41(7): 228-234. doi: 10.13465/j.cnki.jvs.2022.07.030 -

 下载:
下载:




 点击查看大图
点击查看大图
计量
- 文章访问数: 714
- HTML全文浏览量: 881
- PDF下载量: 83
- 被引次数: 0