

Image Encryption Scheme Based on 2D Discrete Chaotic System and Deoxyribonucleic Acid
-
摘要:
为丰富低维离散混沌系统的动力学特性以及克服脱氧核糖核酸(deoxyribonucleic acid, DNA)编码的引入使混沌图像加密系统安全性易于降低的问题,基于Arnold映射构建具有恒定正Lyapunov指数的2维离散混沌系统,并将其与DNA编码结合,设计一个混沌图像加密方案. 所设计的混沌系统模型中不含非线性项,系统具有超混沌动力学行为;加密方案中用于加密的混沌序列为明文图像像素与密钥的加取模运算结果,图像按4 × 4大小予以分块,扩散算法中的DNA加减、异或、同或等运算分别基于DNA编码规则1、规则4和规则7. 仿真实验和性能分析结果表明:加密方案的密钥空间达到2266,信息熵为7.9993 bit,密钥灵敏度达到10−15,平均像素变化率(number of pixel change rate, NPCR)、统一平均变化强度(unified average change intensity, UACI)、块平均变化强度(block average change intensity, BACI)分别为99.6092%、33.4664%、26.7718%.
-
关键词:
- 离散混沌系统 /
- 超混沌 /
- Lyapunov指数 /
- 图像加密
Abstract:In order to enrich the dynamic characteristics of a low-dimensional discrete chaotic system and overcome the problem of low security of chaotic image encryption system caused by the introduction of deoxyribonucleic acid (DNA) coding, a 2D discrete chaotic system with constant positive Lyapunov exponent was constructed based on Arnold map. In addition, a chaotic image encryption scheme was designed by combining the system with DNA coding. The designed chaotic system model did not have nonlinear terms and had hyperchaotic dynamic behavior. The chaotic sequence used for encryption in the encryption scheme was the result of addition and module operation between the plaintext image pixels and the key. Images were divided into blocks by the size of 4 × 4. The operations of DNA addition and subtraction, XOR, and XNOR in the diffusion algorithm were based on DNA coding rule 1, rule 4, and rule 7, respectively. The simulation and performance analysis results show that the key space of the encryption scheme is 2266; the information entropy is 7.999 3 bit; the key sensitivity is 10−15, and the average number of pixel change rate (NPCR), unified average change intensity (UACI), and block average change intensity (BACI) are 99.609 2%, 33.466 4%, and 26.771 8%, respectively.
-
Key words:
- discrete chaotic system /
- hyperchaotic /
- Lyapunov exponent /
- image encryption
-
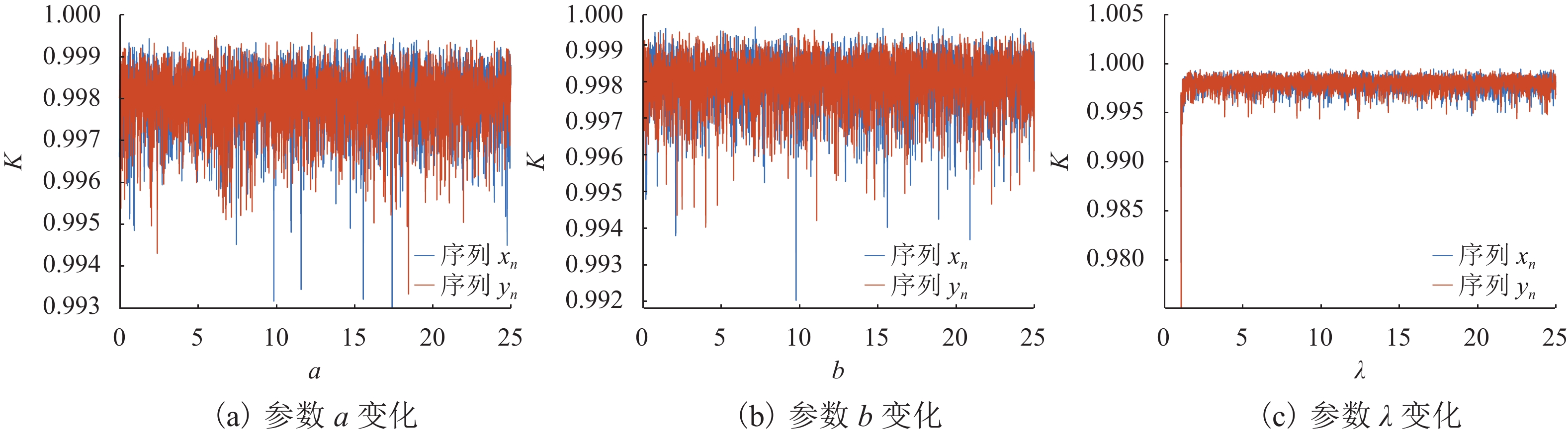
表 1 xn、yn的SE、C0测度平均值
Table 1. Average of SE and C0 for xn and yn
参数 xn 的测度平均值 yn 的测度平均值 SE C0 SE C0 a 0.9460 0.2501 0.9459 0.2962 b 0.9459 0.2500 0.9459 0.2515 λ 0.9452 0.2515 0.9452 0.2702  下载: 导出CSV
下载: 导出CSV
表 2 相关系统的模型复杂度与结构复杂度
Table 2. Model complexity and structural complexity of related systems
下载: 导出CSV
表 3 DNA编码规则
Table 3. DNA encoding rules
编码 规则
1规则
2规则
3规则
4规则
5规则
6规则
7规则
800 A A T T G G C C 01 G C G C A T A T 10 C G C G T A T A 11 T T A A C C G G
下载: 导出CSV
表 5 本文采用的DNA减法运算规则
Table 5. Operation rules of DNA substraction
项目 A G C T A A T C G G G A T C C C G A T T T C G A
下载: 导出CSV
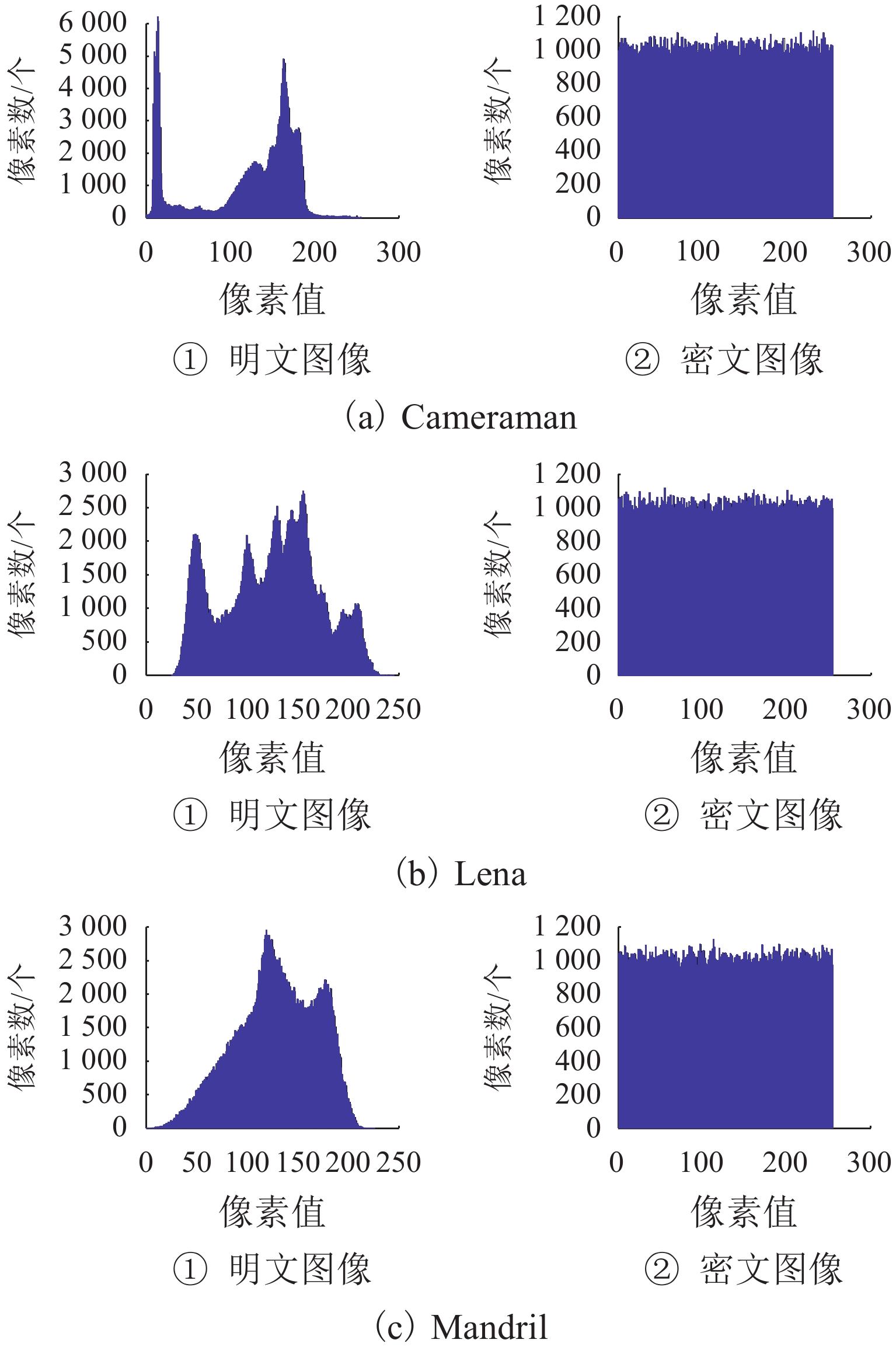
表 10 χ2检验结果
Table 10. Test results of χ2
bit 图像 明文/ × 105 密文 Cameraman 4.1853 248.6660 Lena 1.5834 256.6152 Mandril 2.1137 262.8926
下载: 导出CSV
表 11 相关性系数计算结果
Table 11. Calculation results of correlation coefficient
方案 图像 明/密文 水平 垂直 正对角 反对角 本文 Cameraman 明文 0.9881 0.9840 0.9795 0.9779 密文 −0.0027 0.0101 0.0124 0.0069 Lena 明文 0.9849 0.9726 0.9585 0.9689 密文 0.0115 0.0326 0.0352 −0.0252 Mandril 明文 0.9122 0.9220 0.8692 0.8592 密文 −0.0295 0.0135 0.0175 0.0294 文献[16] Lena 明文 0.9237 0.9420 0.8906 密文 0.0040 −0.0012 −0.0021 Cameraman 明文 0.9333 0.9569 0.9052 密文 −0.0031 −0.0006 0.0011 Horse 明文 0.6425 0.6682 0.5179 密文 0.0034 0.0012 −0.0035 文献[17] Couple 明文 0.9023 0.9478 0.8688 密文 −0.0325 −0.0025 0.0223 Aerial 明文 0.8818 0.8960 0.7885 密文 0.0069 0.0221 0.0172 Stream and bridge 明文 0.9258 0.9387 0.8958 密文 0.2180 0.0468 −0.0318
下载: 导出CSV
表 12 本文所用灰度图像与随机图像间的UACI与BACI值
Table 12. UACI and BACI between gray image and random image used in this paper
% 图像 UACI 值 BACI 值 Cameraman 31.1146 22.8078 Lena 28.6241 21.3218 Mandril 27.5411 20.2075
下载: 导出CSV
表 13 加解密过程密钥灵敏度分析
Table 13. Key sensitivity analysis during encryption and decryption processes
% 参数 指标 加密过程 解密过程 Cameraman Lena Mandril Cameraman Lena Mandril k1 NPCR 99.6090 99.6840 99.6113 99.6090 99.6840 99.6113 UACI 33.4643 33.4662 33.4725 31.1195 28.6277 27.5460 BACI 26.7728 26.7719 26.7732 22.8148 21.3235 20.2097 k2 NPCR 99.6091 99.6099 99.6099 99.6091 99.6099 99.6099 UACI 33.4637 33.4617 33.4592 31.1154 28.6221 27.5354 BACI 26.7674 26.7661 26.7693 22.8043 21.3200 20.2060 k3 NPCR 99.6101 99.6112 99.6103 99.6101 99.6112 99.6103 UACI 33.4639 33.4655 33.4671 31.1202 28.6278 27.5393 BACI 26.7738 26.7742 26.7646 22.8075 21.3248 20.2062 k4 NPCR 99.6086 99.6083 99.6091 99.6086 99.6083 99.6091 UACI 33.4610 33.4643 33.4641 31.1114 28.6197 27.5388 BACI 26.7706 26.7708 26.7692 22.8061 21.3174 20.2045 k5 NPCR 99.6084 99.6112 99.6101 99.6084 99.6112 99.6101 UACI 33.4664 33.4640 33.4669 31.1209 28.6228 27.5393 BACI 26.7689 26.7722 26.7703 22.8104 21.3222 20.2043 r1 NPCR 99.6088 99.6101 99.6111 99.6088 99.6101 99.6111 UACI 33.4608 33.4679 33.4650 31.1200 28.6299 27.5404 BACI 26.7701 26.7751 26.7702 22.8104 21.3216 20.2061 r2 NPCR 99.6101 99.6089 99.6112 99.6101 99.6089 99.6112 UACI 33.4619 33.4692 33.4615 31.1186 28.6137 27.5363 BACI 26.7667 26.7729 26.7712 22.8089 21.3215 20.2069 r3 NPCR 99.6101 99.6089 99.6112 UACI 31.1189 28.6300 27.5466 BACI 22.8143 21.3210 20.2117 r4 NPCR 99.6101 99.6089 99.6112 UACI 31.1175 28.6251 27.5375 BACI 22.8048 21.3235 20.2015
下载: 导出CSV
表 14 明文敏感性
Table 14. Plaintext sensitivity
% 图像 NPCR UACI BACI Cameraman 99.6083 33.4632 26.7711 Lena 99.6106 33.4685 26.7711 Mandril 99.6087 33.4676 26.7733
下载: 导出CSV
-
[1] LI W S, YAN W H, ZHANG R X, et al. A new 3D discrete hyperchaotic system and its application in secure transmission[J]. International Journal of Bifurcation and Chaos, 2019, 29(14): 1950206.1-1950206.14. [2] RAY A, GHOSH D. Another new chaotic system: bifurcation and chaos control[J]. International Journal of Bifurcation and Chaos, 2020, 30(11): 2050161.1-2050161.13. [3] YU F, QIAN S, CHEN X, et al. Chaos-based engineering applications with a 6D memristive multistable hyperchaotic system and a 2D SF-SIMM hyperchaotic map[J]. Complexity, 2021, 2021. 6683284.1- 6683284.21. [4] BELAZI A, HERMASSI H, RHOUMA R, et al. Algebraic analysis of a RGB image encryption algorithm based on DNA encoding and chaotic map[J]. Nonlinear Dynamics, 2014, 76(4): 1989-2004. doi: 10.1007/s11071-014-1263-y [5] WANG X Y, LI P, ZHANG Y Q, et al. A novel color image encryption scheme using DNA permutation based on the Lorenz system[J]. Multimedia Tools and Applications, 2018, 77(5): 6243-6265. doi: 10.1007/s11042-017-4534-z [6] WANG X Y, ZHANG H L, BAO X M. Color image encryption scheme using CML and DNA sequence operations[J]. Biosystems, 2016, 144: 18-26. doi: 10.1016/j.biosystems.2016.03.011 [7] ZHANG X Q, WANG X S. Multiple-image encryption algorithm based on DNA encoding and chaotic system[J]. Multimedia Tools and Applications, 2019, 78(6): 7841-7869. doi: 10.1007/s11042-018-6496-1 [8] JITHIN K C, SANKAR S. Colour image encryption algorithm combining Arnold map, DNA sequence operation, and a Mandelbrot set[J]. Journal of Information Security and Applications, 2020, 50: 102428.1-102428.22. [9] LIU T M, BANERJEE S, YAN H Z, et al. Dynamical analysis of the improper fractional-order 2D-SCLMM and its DSP implementation[J]. The European Physical Journal Plus, 2021, 136(5): 506.1-506.17. [10] AKIF O Z, ALI S, ALI R S, et al. A new pseudorandom bits generator based on a 2D-chaotic system and diffusion property[J]. Bulletin of Electrical Engineering and Informatics, 2021, 10(3): 1580-1588. doi: 10.11591/eei.v10i3.2610 [11] MERANZA-CASTILLÓN M O, MURILLO-ESCOBAR M A, LÓPEZ-GUTIÉRREZ R M, et al. Pseudorandom number generator based on enhanced Hénon map and its implementation[J]. International Journal of Electronics and Communications, 2019, 107: 239-251. doi: 10.1016/j.aeue.2019.05.028 [12] LIU Y, QIN Z, LIAO X F, et al. A chaotic image encryption scheme based on Hénon-Chebyshev modulation map and genetic operations[J]. International Journal of Bifurcation and Chaos, 2020, 30(6): 2050090.1-2050090.22. doi: 10.1142/S021812742050090X [13] KANSO A, GHEBLEH M, ALAZEMI A. Efficient image encryption scheme based on 4-dimensional chaotic maps[J]. Informatica, 2020, 31(4): 793-820. [14] WANG Y J, WU C C, KANG S Q, et al. Multi-channel chaotic encryption algorithm for color image based on DNA coding[J]. Multimedia Tools and Applications, 2020, 79(25): 18317-18342. [15] SUN C Y, WANG E F, ZHAO B. Image encryption scheme with compressed sensing based on a new six-dimensional non-degenerate discrete hyperchaotic system and plaintext-related scrambling[J]. Entropy, 2021, 23(3): 291.1-291.25. [16] ZHANG S J, LIU L F. A novel image encryption algorithm based on SPWLCM and DNA coding[J]. Mathematics and Computers in Simulation, 2021, 190: 723-744. doi: 10.1016/j.matcom.2021.06.012 [17] TIAN J F, LU Y, ZUO X Y, et al. A novel image encryption algorithm using PWLCM map-based CML chaotic system and dynamic DNA encryption[J]. Multimedia Tools and Applications, 2021, 80(21): 32841-32861. [18] KANG X J, GUO Z H. A new color image encryption scheme based on DNA encoding and spatiotemporal chaotic system[J]. Signal Processing: Image Communication, 2020, 80: 115670-115681. doi: 10.1016/j.image.2019.115670 [19] WANG C F, FAN C L, FENG K, et al. Analysis of the time series generated by a new high-dimensional discrete chaotic system[J]. Complexity, 2018, 2018: 1-11. [20] SUN K H, LIU X, ZHU C X. The 0-1 test algorithm for chaos and its applications[J]. Chinese Physics B, 2010, 19(11): 204-210. [21] 叶晓林,牟俊,王智森,等. 基于SE和C0算法的连续混沌系统复杂度分析[J]. 大连工业大学学报,2018,37(1): 67-72.YE Xiaolin, MOU Jun, WANG Zhisen, et al. Analysis of continuous chaotic complexity based on SE and C0 algorithm[J]. Journal of Dalian Polytechnic University, 2018, 37(1): 67-72. [22] 孙克辉. 混沌保密通信原理与技术[M]. 北京: 清华大学出版社, 2015: 30-33. -

 下载:
下载:










 点击查看大图
点击查看大图

计量
- 文章访问数: 634
- HTML全文浏览量: 359
- PDF下载量: 57
- 被引次数: 0