

Vulnerability Analysis of En-route Network Based on Cascading Failure
-
摘要:
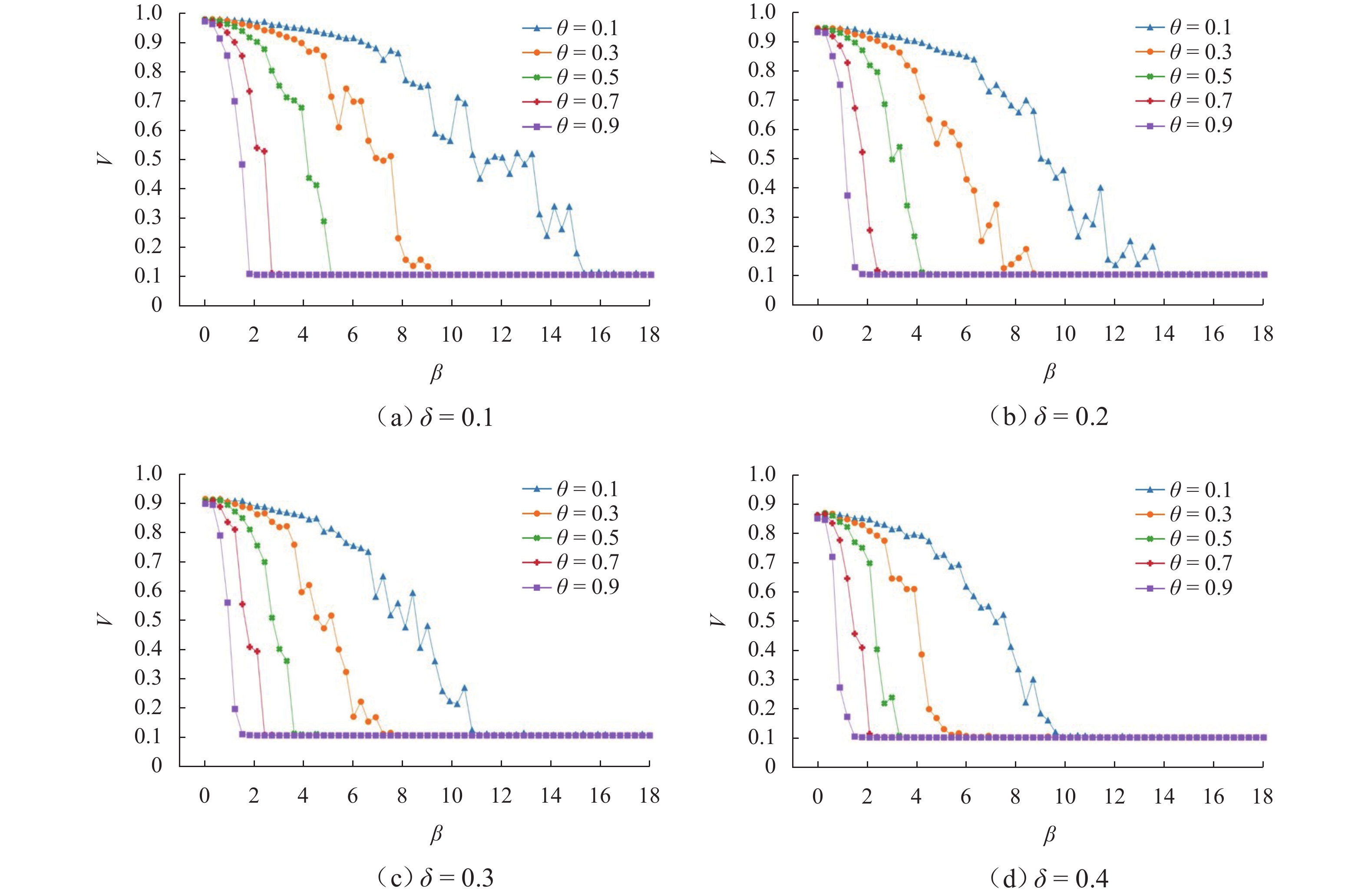
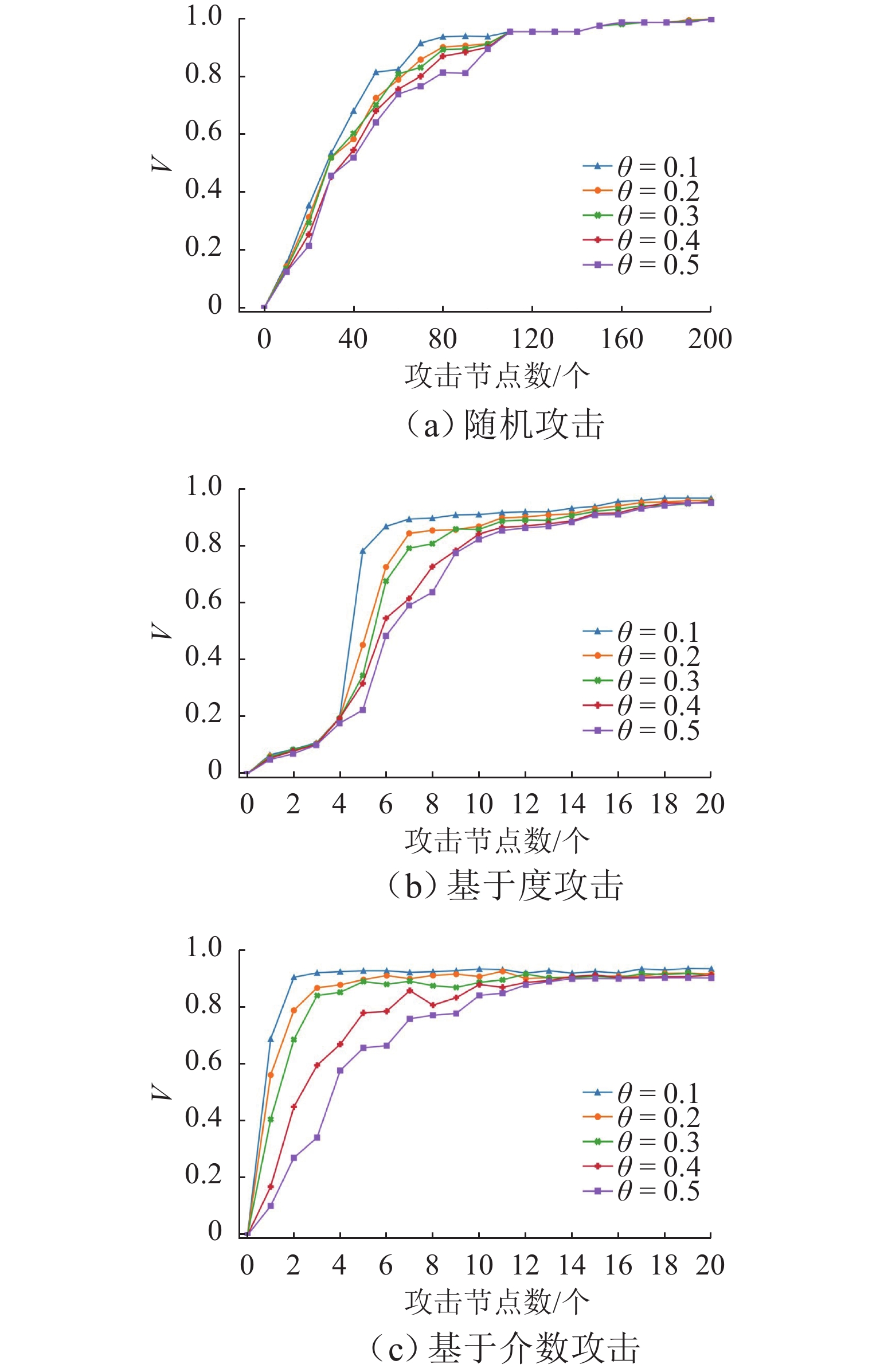
为探究级联失效所造成的航路网络脆弱性变化规律,基于不同攻击方式的级联失效过程对航路网络脆弱性进行分析. 首先,结合航路网络超容运行实际,提取非失效状态节点的过载运行、节点失效的概率性和节点所经负载的可分流性3个特点,构建航路网络级联失效模型和不同攻击方式的级联失效过程;然后,从航路点运行能力损失角度提出航路网络级脆弱性指标以及与级联失效模型相结合的脆弱性分析方法;最后,以民航华东区域为实例,分析航路网络脆弱性与所建模型参数的关联性,探究不同参数条件下航路网络脆弱性指标的变化规律,并设计了3种攻击实验. 研究表明:各航路点运行能力随着负载流量的超容范围增加而提升,航路网络脆弱性随之降低;航路网络对选择性攻击方式较为敏感,尤其是基于介数的攻击.
Abstract:In order to explore the variation of the vulnerability of the en-route network caused by cascading failure, the vulnerability of the en-route network was analyzed based on the cascading failure process of different attack methods. By combining with the actual overcapacity operation of the en-route network, the overload operation of the nodes in the non-failure state, the probability of node failure, and the divertability of the load passed by the nodes were extracted. The cascading failure model of the en-route network and the cascading failure process based on different attack methods were constructed, and the en-route network-level vulnerability index was proposed from the perspective of the loss of waypoint operation capacity, as well as the vulnerability analysis method combined with the cascading failure model. The correlation between the vulnerability of the en-route network and the proposed model parameters was analyzed by studying the operation data in Eastern China, and the change rule of the vulnerability index of the en-route network under different parameters was explored. Three kinds of attack experiments were designed, and the results show that the operation capacity of each waypoint increases with the overcapacity range of the load flow, and the vulnerability of the en-route network decreases; the en-route network is more sensitive to selective attack methods, especially those based on the betweenness.
-
Key words:
- air traffic /
- en-route network /
- complex networks /
- cascading failure /
- vulnerability
-
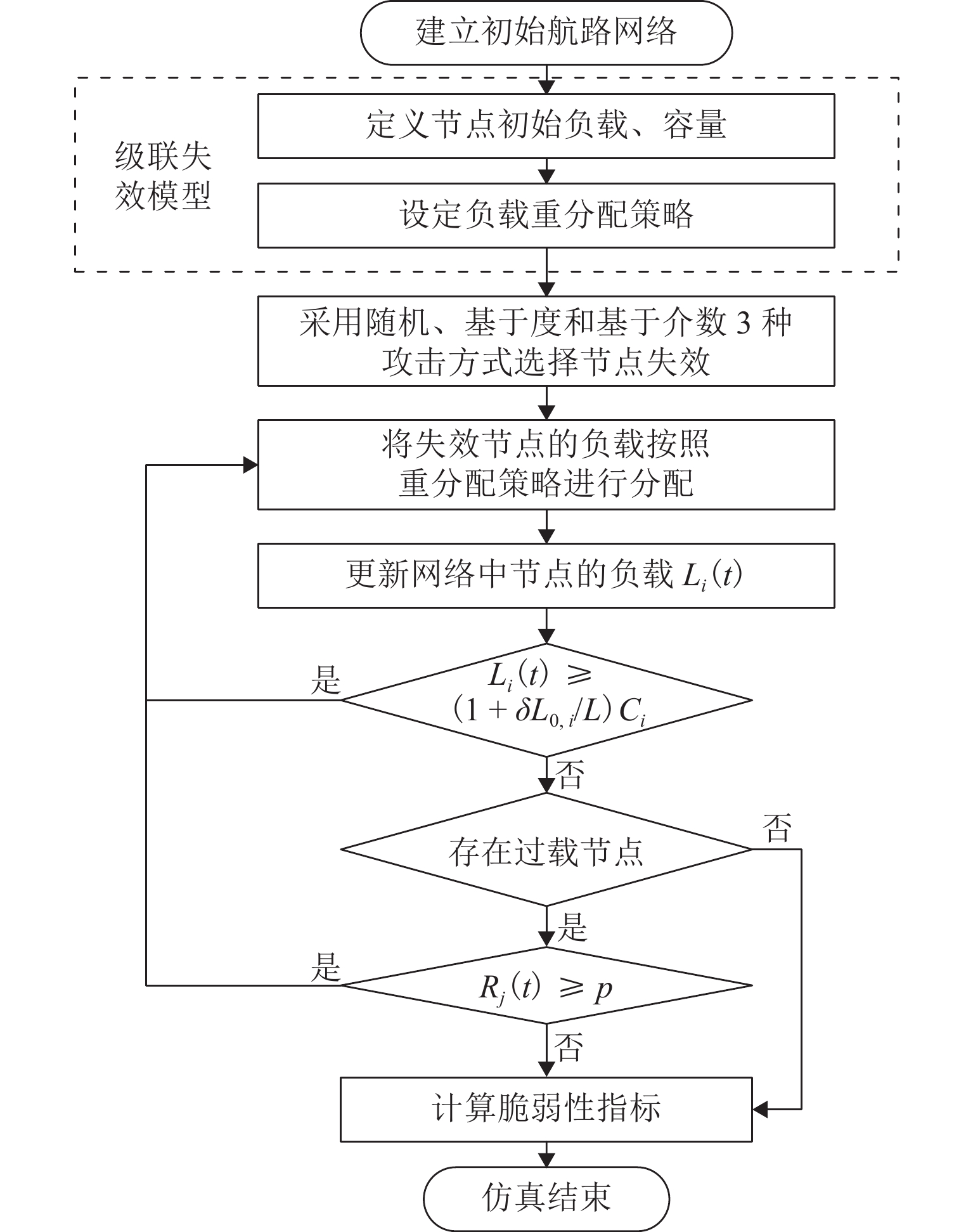
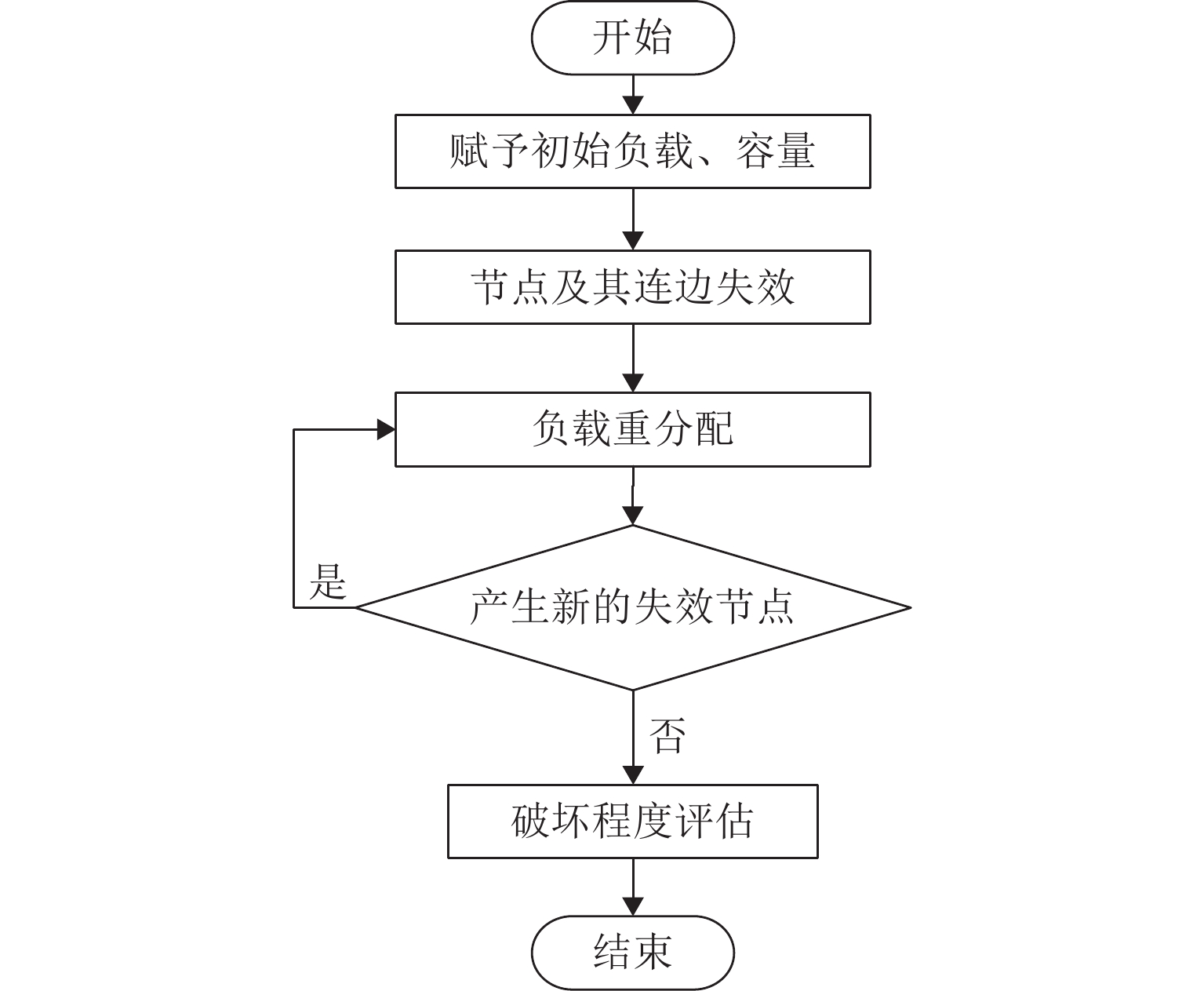
图 4 基于级联失效的航路网络脆弱性分析流程
Figure 4. Vulnerability analysis process of en-route network based on cascading failure
表 1 航路网络节点度分布情况
Table 1. Distribution of node degree of en-route network
度数 节点数/个 比例/% 1 24 7.0 2 151 44.0 3 67 19.5 4 65 19.0 5 16 4.7 6 13 3.8 7 3 0.9 8 1 0.3 9 2 0.6 10 1 0.3  下载: 导出CSV
下载: 导出CSV
-
[1] 程光权,陆永中,张明星,等. 复杂网络节点重要度评估及网络脆弱性分析[J]. 国防科技大学学报,2017,39(1): 120-127.CHENG Guangquan, LU Yongzhong, ZHANG Mingxing, et al. Node importance evaluation and network vulnerability analysis on complex network[J]. Journal of National University of Defense Technology, 2017, 39(1): 120-127. [2] HU Y Q, ZHOU D, ZHANG R, et al. Percolation of interdependent networks with intersimilarity[J]. Physical Review E, 2013, 88(5): 052805.1-052805.7. [3] WANG J W, SUN E H, XU B, et al. Abnormal cascading failure spreading on complex networks[J]. Chaos, Solitons & Fractals, 2016, 91: 695-701. [4] KIM M, KIM J S. A model for cascading failures with the probability of failure described as a logistic function[J]. Scientific Reports, 2022, 12: 989-998. doi: 10.1038/s41598-021-04753-z [5] 徐伟举. 基于复杂网络的美国航空线路网络的抗毁性研究[D]. 成都:西南交通大学,2013. [6] 王兴隆,贺敏,刘明学. 空中交通CPS级联失效与缓解策略[J]. 北京航空航天大学学报,2021,47(12): 2426-2433.WANG Xinglong, HE Min, LIU Mingxue. Air traffic CPS cascading failure and mitigation strategy[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(12): 2426-2433. [7] 汪凯强,王布宏,曾乐雅,等. 不同负载条件下的航空网络抗毁性研究[J]. 电光与控制,2022,29(7): 86-90.WANG Kaiqiang, WANG Buhong, ZENG Leya, et al. Survivability of airline network under different load models[J]. Electronics Optics & Control, 2022, 29(7): 86-90. [8] MIRZASOLEIMAN B, BABAEI M, JALILI M, et al. Cascaded failures in weighted networks[J]. Physical Review E, Statistical, Nonlinear, and Soft Matter Physics, 2011, 84: 046114.1-046114.8. [9] CUMELLES J, LORDAN O, SALLAN J M. Cascading failures in airport networks[J]. Journal of Air Transport Management, 2021, 92: 102026.1-102026.10. [10] 齐雁楠,高经东. 空域扇区网络级联失效抗毁性及优化策略[J]. 航空学报,2018,39(12): 349-357.QI Yannan, GAO Jingdong. Cascading failure invulnerability and optimization strategy of airspace sector network[J]. Acta Aeronautica et Astronautica Sinica, 2018, 39(12): 349-357. [11] 王兴隆,刘明学,高经东. 基于复杂网络的空域扇区网络建模与抗毁性研究[J]. 武汉理工大学学报,2018,40(11): 50-55.WANG Xinglong, LIU Mingxue, GAO Jingdong. Research on modeling analysis and invulnerability of sector network based on complex network[J]. Journal of Wuhan University of Technology, 2018, 40(11): 50-55. [12] 王兴隆,潘维煌,赵末. 华北航空相依网络统计特征与鲁棒性分析[J]. 科学技术与工程,2018,18(13): 180-185.WANG Xinglong, PAN Weihuang, ZHAO Mo. Analysis of network characteristics and robustness of aeronautical interdependent network in North China[J]. Science Technology and Engineering, 2018, 18(13): 180-185. [13] 王兴隆,潘维煌. 航空相依网络的弹性测度与分析[J]. 计算机仿真,2019,36(11): 40-43,58.WANG Xinglong, PAN Weihuang. The resilience measurement and analysis of aeronautical interdependent network[J]. Computer Simulation, 2019, 36(11): 40-43,58. [14] 王兴隆,潘维煌,赵末. 航空相依网络故障传播机理研究[J]. 武汉理工大学学报,2018,40(6): 41-46.WANG Xinglong, PAN Weihuang, ZHAO Mo. Research on fault propagation mechanism of aviation interdependent network[J]. Journal of Wuhan University of Technology, 2018, 40(6): 41-46. [15] ZHANG J, ZHANG Z H. A review of the research methods on vulnerability of transportation system[C]// CICTP 2019. Nanjing: American Society of Civil Engineers, 2019: 4294-4305. [16] GUZE S. Graph theory approach to the vulnerability of transportation networks[J]. Algorithms, 2019, 12(12): 270.1-270.12. [17] 王兴隆,潘维煌,赵末. 空中交通相依网络的脆弱性研究[J]. 航空学报,2018,39(12): 268-277.WANG Xinglong, PAN Weihuang, ZHAO Mo. Vulnerability of air traffic interdependent network[J]. Acta Aeronautica et Astronautica Sinica, 2018, 39(12): 268-277. [18] 周子丰. 基于复杂网络理论的民航陆基空管保障系统脆弱性分析[D]. 广汉:中国民用航空飞行学院,2018. [19] WILKINSON S M, DUNN S, MA S. The vulnerability of the European air traffic network to spatial hazards[J]. Natural Hazards, 2012, 60(3): 1027-1036. doi: 10.1007/s11069-011-9885-6 [20] 李航,胡小兵. 一种改进的民用航空网络空间脆弱性模型[J]. 交通运输系统工程与信息,2018,18(4): 202-208.LI Hang, HU Xiaobing. An improved spatial vulnerability model for civil aviation network[J]. Journal of Transportation Systems Engineering and Information Technology, 2018, 18(4): 202-208. [21] JANIĆ M. Modelling the resilience, friability and costs of an air transport network affected by a large-scale disruptive event[J]. Transportation Research Part A: Policy and Practice, 2015, 71: 1-16. doi: 10.1016/j.tra.2014.10.023 [22] VOLTES-DORTA A, RODRÍGUEZ-DÉNIZ H, SUAU-SANCHEZ P. Vulnerability of the European air transport network to major airport closures from the perspective of passenger delays: ranking the most critical airports[J]. Transportation Research Part A: Policy and Practice, 2017, 96: 119-145. doi: 10.1016/j.tra.2016.12.009 [23] LORDAN O, KLOPHAUS R. Measuring the vulnerability of global airline alliances to member exits[J]. Transportation Research Procedia, 2017, 25: 7-16. doi: 10.1016/j.trpro.2017.05.189 [24] Roy S, Xue M, Sridhar B. Vulnerability metrics for the airspace system[C]//Twelfth USA/Europe Air Traffic Management Research and Development Seminar (ATM2017). Seattle: Curran Associates, 2017: 1-26. [25] TAMIMI A, HAHN A, ROY S. Cyber threat impact analysis to air traffic flows through dynamic queue networks[J]. ACM Transactions on Cyber-Physical Systems, 2020, 4(3): 1-22. [26] 田文,方琴,周雪芳,宋津津. 航路网络关键节点识别方法研究[J]. 西南交通大学学报,2025,60(1): 233-242.TIAN Wen, ZHOU Xuefang, FANG Qin, et al. Research on identification method of key nodes in en-route network[J]. Journal of Southwest Jiaotong University,2025,60(1): 233-242. [27] 种鹏云. 基于复杂网络的危险品运输网络拓扑特性、级联失效机制及抗毁性研究[D]. 成都:西南交通大学,2015. [28] 欧阳敏,费奇,余明辉,等. 复杂网络的功效性与脆弱性研究综述[J]. 计算机科学,2008,35(6): 1-4.OUYANG Min, FEI Qi, YU Minghui, et al. Survey on efficiency and vulnerability of complex network[J]. Computer Science, 2008, 35(6): 1-4. -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 319
- HTML全文浏览量: 166
- PDF下载量: 35
- 被引次数: 0