

Analysis of Bending Natural Vibration Characteristics of Box Girder Based on Additional Deflection for Shear Lag
-
摘要:
为揭示弯曲空间效应对自振频率削弱的影响规律,选取剪力滞效应引起的附加挠度为广义位移,将箱梁翘曲附加变形纳入体系总动能中,运用Hamilton原理,建立考虑剪切、剪力滞及双重效应影响的箱梁弯曲自振频率变分解析解,引入空间效应对自振频率削弱影响的差值比参数,详细分析截面尺寸及边中跨径比对差值比参数的影响. 算例分析表明:考虑剪切和双重效应影响的箱梁自振频率解析解与有限元数值解吻合较好;频率阶数越大,各效应对自振频率的削弱程度越大,其中,双重效应影响最为显著,对一阶频率,双重效应对简支和连续箱梁自振频率分别削弱了4.72%和4.80%;跨宽比、宽高比和边中跨径比越大,自振频率差值比越小;板宽比越大,剪力滞、双重效应自振频率差值比越小,剪切自振频率差值比越大;同一跨宽比时,剪力滞和剪切效应对自振频率的削弱程度相当;不同宽高比下,剪力滞效应对自振频率的削弱程度近乎相同,剪切效应影响较为显著;低阶自振频率计算时可按不带悬臂板的箱梁进行计算.
Abstract:In order to reveal the influence of the bending space effect on natural vibration frequency weakening, the additional deflection caused by the shear lag effect was selected as the generalized displacement, and the warping additional deformation of box girder was incorporated into the total kinetic energy of the system. The bending variational solution of the natural vibration frequency of box girder considering the influence of shear deformation, shear lag, and their double effects was established by using the Hamilton principle. The difference ratio parameter of spatial effect on natural vibration frequency weakening was introduced, and the influence of the section size and the side-to-middle span on the difference ratio parameter was analyzed in detail. The example analysis shows that the analytical solution of the natural vibration frequency of the box girder considering shear derformation and double effects is in good agreement with the finite element numerical solution. A larger frequency order indicates a greater weakening degree of each effect to the natural vibration frequency. The double effect is the most significant, which reduces the natural vibration frequency of simply supported and continuous box girders by 4.72% and 4.80% respectively for the first-order frequency. The larger span width ratio, width-to-height ratio, and side-to-middle span ratio indicate a smaller difference ratio of natural vibration frequency. A larger plate width ratio is accompanied by a smaller difference ratio of natural vibration frequency considering shear lag and double effect and a larger difference ratio of natural vibration frequency considering shear derformation . At the same span width ratio, shear lag and shear derformation effects weaken the natural vibration frequency to the same extent. At the different width-to-height ratio ratios, the shear lag effect weakens the natural vibration frequency to almost the same extent, and the shear derformation effect has a more significant impact. Low-order natural vibration frequency can be calculated using a box girder without a cantilever plate.
-
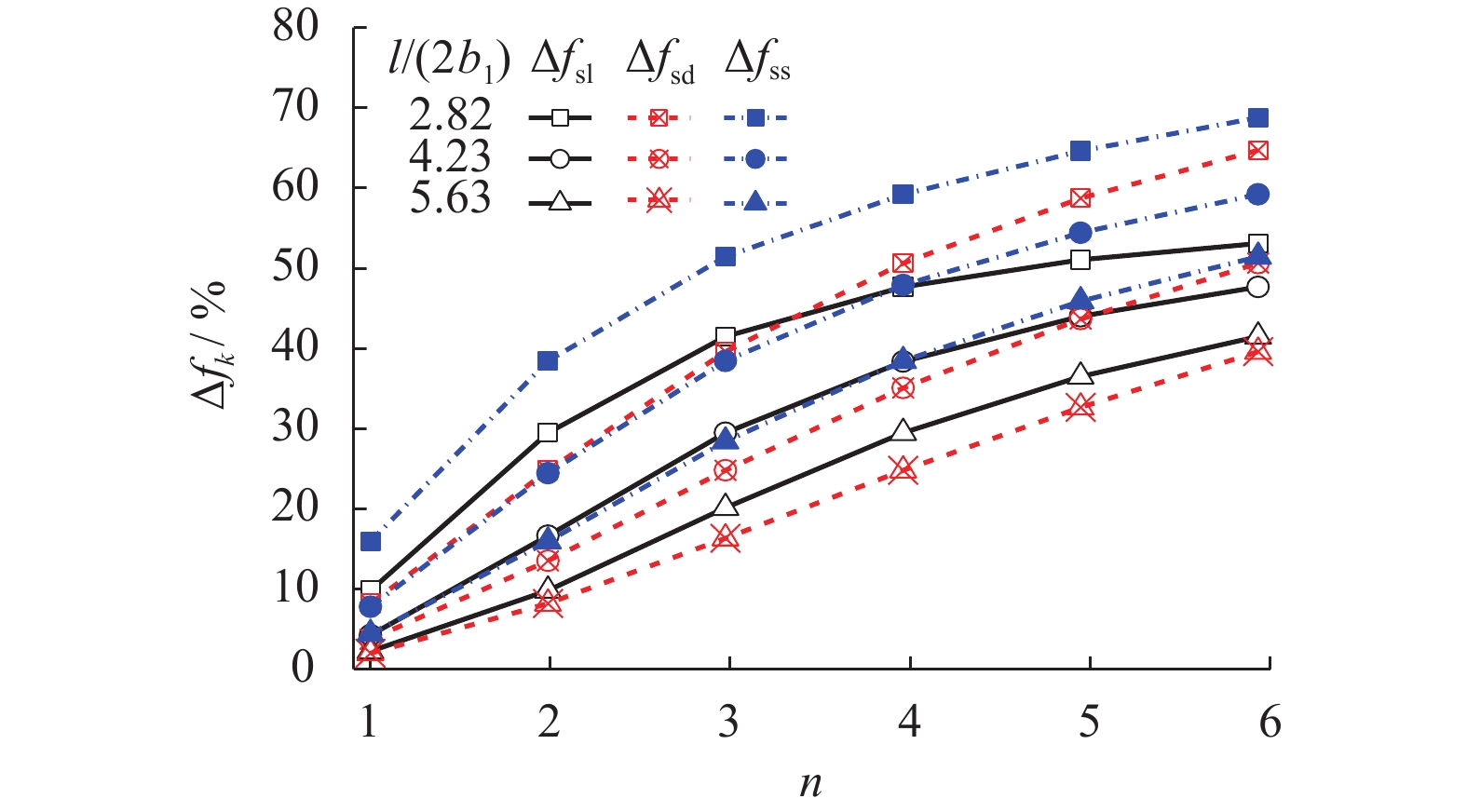
图 3 跨宽比对箱梁弯曲自振频率差值比的影响
Figure 3. Influence of span width ratio on difference ratio of bending natural vibration frequency of box girder
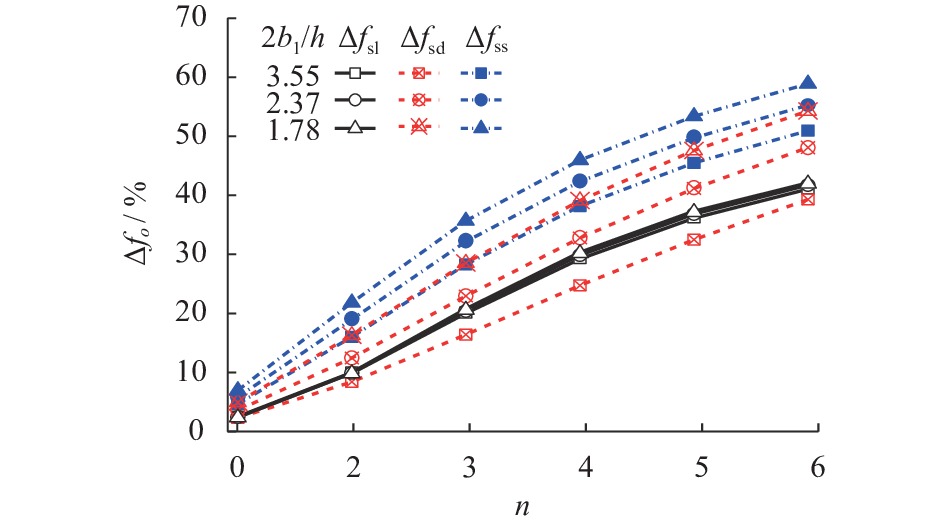
图 4 宽高比对箱梁自振频率差值比的影响
Figure 4. Influence of width-to-height ratio on natural vibration frequency difference ratio of box girder
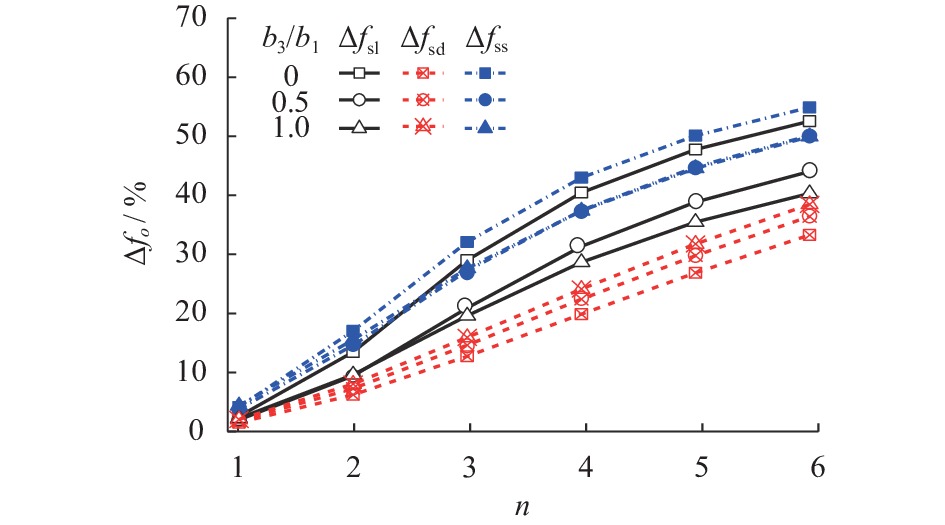
图 5 板宽比对箱梁弯曲自振频率差值比的影响
Figure 5. Influence of plate width ratio on difference ratio of bending natural vibration frequency of box girder
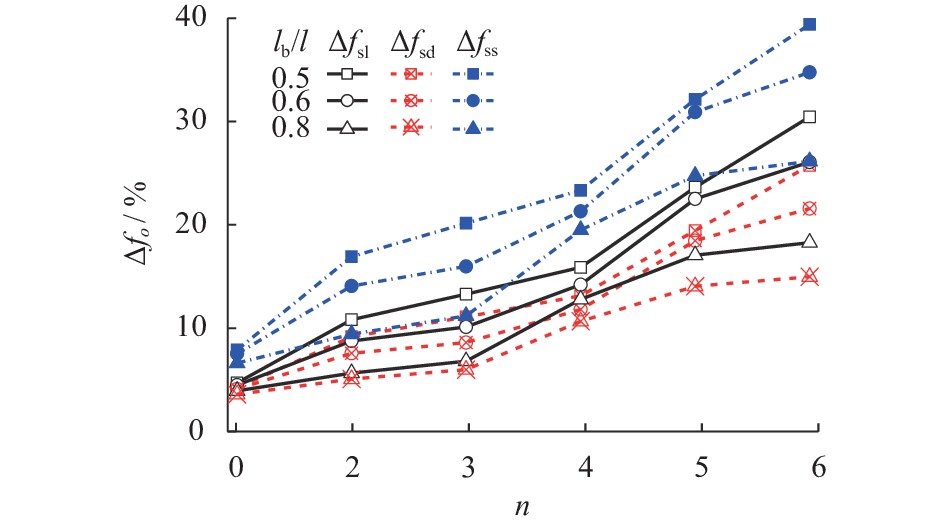
图 6 边中跨径比对连续箱梁自振频率差值比的影响
Figure 6. Influence of side-to-middle span ratio on natural vibration frequency difference ratio of continuous box girder
表 1 不等跨连续梁自振频率参数影响因子
Table 1. Influence factors of natural vibration frequency parameters of continuous girders with unequal span
lb/l n 1 2 3 4 5 6 0.5 1.250 2.000 2.250 2.500 3.250 4.000 0.6 1.215 1.777 1.926 2.340 3.137 3.503 0.7 1.174 1.565 1.699 2.264 2.908 3.060 0.8 1.125 1.390 1.542 2.200 2.613 2.728 0.9 1.066 1.248 1.437 2.118 2.351 2.500 1.0 1.000 1.132 1.368 2.000 2.135 2.365  下载: 导出CSV
下载: 导出CSV
表 2 简支箱梁弯曲自振频率对比
Table 2. Comparison of bending natural vibration frequency of simply supported box girder
Hz n f0 fsl fsd fss ANSYS 结果 Midas 结果 1 3.243 3.160 3.167 3.090 3.108 3.121 2 12.973 11.663 11.871 10.874 10.783 11.124 3 29.188 23.250 24.349 20.851 22.957 23.385 4 51.890 36.511 38.927 31.891 33.325 33.891 5 81.079 51.398 54.491 43.838 44.681 45.332 6 116.753 68.215 70.429 56.690 59.690 60.449
下载: 导出CSV
表 3 连续箱梁弯曲自振频率对比
Table 3. Comparison of bending natural vibration frequency of continuous box girder
Hz n f0 fsl fsd fss ANSYS 结果 Midas 结果 1 3.246 3.160 3.170 3.090 3.192 3.221 2 4.157 4.019 4.033 3.908 4.036 4.242 3 6.073 5.778 5.815 5.556 5.356 5.667 4 12.978 11.663 11.875 10.874 10.048 10.524 5 14.794 13.097 13.385 12.135 11.877 12.487 6 18.150 15.648 16.093 14.356 12.366 13.191
下载: 导出CSV
-
[1] 《中国公路学报》编辑部. 中国桥梁工程学术研究综述·2021[J]. 中国公路学报, 2021, 34 (2): 1-97.Editorial Department of China Journal of Highway and Transpor. Review on China’s bridge engineering research: 2021[J]. China Journal of Highway and Transport, 2021, 34 (2): 1-97. [2] 冀伟,罗奎,马万良,等. 装配式波形腹板钢箱-混凝土组合梁桥动力特性分析与试验研究[J]. 振动与冲击,2020,39(20): 1-7,16.JI Wei, LUO Kui, MA Wanliang, et al. Dynamic characteristics analysis and experimental study of a fabricated corrugated web steel box-concrete composite girder bridge[J]. Journal of Vibration and Shock, 2020, 39(20): 1-7,16. [3] DOMAGALSKI Ł. Comparison of the natural vibration frequencies of Timoshenko and Bernoulli periodic beams[J]. Materials, 2021, 14(24): 7628.1-7628.22. [4] JI W, LUO K, MA W L. Natural vibration frequency analysis for a PC continuous box-girder bridge with corrugated steel web based on the dynamic stiffness matrix[J]. Journal of Highway and Transportation Research and Development (English Edition), 2020, 14(1): 65-74. doi: 10.1061/JHTRCQ.0000718 [5] SUN Q K, ZHANG N, LIU X. A dynamic stiffness matrix method for free vibrations of partial-interaction composite beams based on the Timoshenko beam theory[J]. Journal of Sound and Vibration, 2022, 520: 116579.1-116579.14. [6] JIANG L Z, LAI Z P, ZHOU W B. Improved finite beam element method for analyzing the flexural natural vibration of thin-walled box girders[J]. Advances in Mechanical Engineering, 2017, 9(8): 1888-1902. [7] 房建,韦智敏,郑稳稳,等. 城市高架轨道交通引发的箱梁振动特性分析[J]. 铁道学报,2022,44(4): 136-142.FANG Jian, WEI Zhimin, ZHENG Wenwen, et al. Study on vibration characteristics of elevated box girders induced by track irregularities[J]. Journal of the China Railway Society, 2022, 44(4): 136-142. [8] 张新亚,雷晓燕,罗锟. TMD控制高架轨道箱梁结构振动的模型试验研究[J]. 振动与冲击,2021,40(16): 220-226,233.ZHANG Xinya, LEI Xiaoyan, LUO Kun. A model test study on controlling vibration of an elevated track box girder structure with TMD[J]. Journal of Vibration and Shock, 2021, 40(16): 220-226,233. [9] 郑尚敏,万水,程海根. 单箱多室波形钢腹板组合箱梁动力特性研究[J]. 铁道工程学报,2017,34(9): 41-46.ZHENG Shangmin, WAN Shui, CHENG Haigen. Research on the dynamic characteristics of multi-room single box composite girder with corrugated steel webs[J]. Journal of Railway Engineering Society, 2017, 34(9): 41-46. [10] JIANG L Z, YU J, ZHOU W B, et al. Analysis of flexural natural vibrations of thin-walled box beams using higher order beam theory[J]. The Structural Design of Tall and Special Buildings, 2019, 28(14): 1659.1-1659.15. [11] 李丽园,周茂定,张元海. 薄壁连续箱梁的弯曲自振频率分析[J]. 东南大学学报(自然科学版),2018,48(1): 99-105.LI Liyuan, ZHOU Maoding, ZHANG Yuanhai. Analysis of bending natural vibration frequency of thin-walled continuous box girder[J]. Journal of Southeast University (Natural Science Edition), 2018, 48(1): 99-105. [12] 周茂定,蔺鹏臻,李丽园. 考虑各板面内剪切影响的箱梁竖向纯弯自振特性分析[J]. 振动工程学报,2020,33(6): 1162-1169.ZHOU Maoding, LIN Pengzhen, LI Liyuan. Analysis of vertical pure bending natural vibration characteristics of box girder considering the influence of in-plane shear[J]. Journal of Vibration Engineering, 2020, 33(6): 1162-1169. [13] ZHANG Y T, JIANG L Z, ZHOU W B, et al. Shear lag effect and accordion effect on dynamic characteristics of composite box girder bridge with corrugated steel webs[J]. Applied Sciences, 2020, 10(12): 4346.1-4346.13. [14] 项贻强,邱政,何百达,等. 具有体外预应力索的快速施工群钉式钢-混组合小箱梁自振特性分析[J]. 中国公路学报,2020,33(1): 100-110.XIANG Yiqiang, QIU Zheng, HE Baida, et al. Analytical approach for the free vibration of accelerated construction steel-concrete composite small box girders with external prestressed tendons and group studs[J]. China Journal of Highway and Transport, 2020, 33(1): 100-110. [15] SHEN J, PAGANI A, ARRUDA M R T, et al. Exact component-wise solutions for 3D free vibration and stress analysis of hybrid steel-concrete composite beams[J]. Thin-Walled Structures, 2022, 174: 109094.1-109094.13. [16] 冀伟,温凯康,罗奎. 基于Galerkin法的新型波形钢腹板箱梁桥动力特性研究[J]. 工程科学与技术,2022,54(3): 131-138.JI Wei, WEN Kaikang, LUO Kui. Dynamic characteristics of new type composite box girder bridge with corrugated steel webs based on Galerkin method[J]. Advanced Engineering Sciences, 2022, 54(3): 131-138. [17] CAI Y X, ZHANG K, YE Z J, et al. Influence of temperature on the natural vibration characteristics of simply supported reinforced concrete beam[J]. Sensors, 2021, 21(12): 4242.1-4242.14. [18] QIU C, XIE X L, YANG C J, et al. Methods of improving the natural vibration characteristics of the through tied-arch bridge and test verification[J]. International Journal of Steel Structures, 2022, 22(1): 343-360. doi: 10.1007/s13296-022-00577-3 [19] 张玉元. 考虑翼板横向位移影响的箱梁弯曲静动力特性分析理论及其应用研究[D]. 兰州: 兰州交通大学, 2020. -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 448
- HTML全文浏览量: 240
- PDF下载量: 67
- 被引次数: 0