

Influence Mechanism of Long-Span Arch Bridge Deformation on Running Stability of High-Speed Trains Under Crosswind
-
摘要:
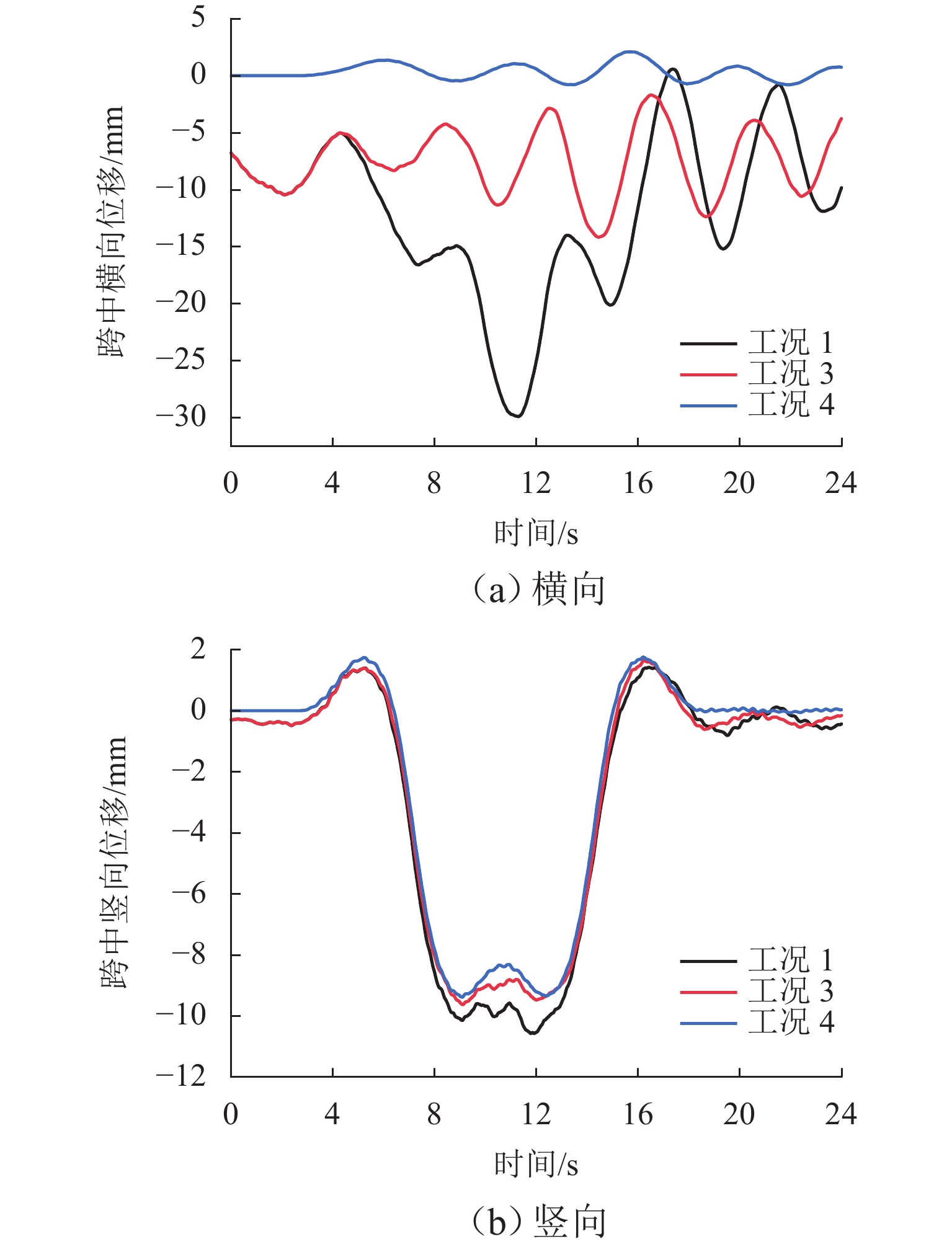
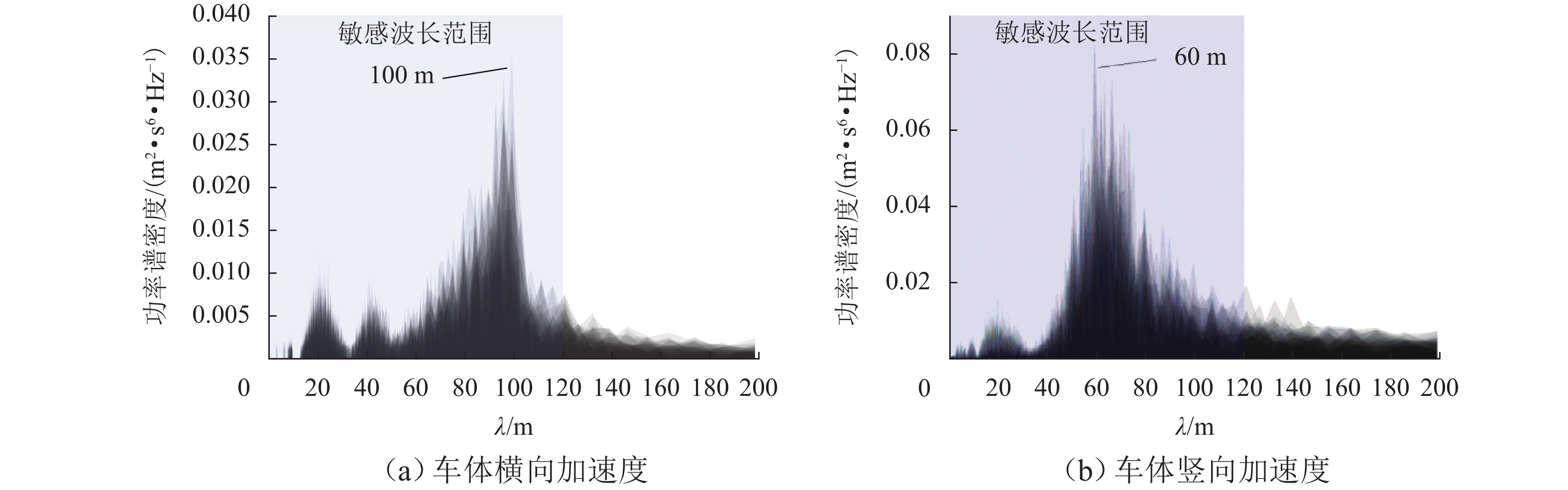
为探求侧风下的拱桥变形对列车平稳性的作用机理,通过风-车-桥耦合系统得到跨中横、竖向位移,分析不同风速、车速下的列车行车平稳性,量化桥梁变形对风-车-桥系统中列车横、竖向加速度的贡献;结合车体加速度响应的敏感波长及桥梁变形的时频特性,分析桥梁变形对行车平稳性影响机理. 结果表明:桥梁竖向位移差异较横向位移差异较小,且主要位移由车致桥梁变形产生,最大幅值达到了−9.2 mm;在列车及风荷载作用下,桥梁横向及竖向位移较为显著,但其对列车平稳性的影响主要体现在交界墩位置处,约为其余位置响应的4倍;除交界墩区域,桥上列车的行车平稳性主要由风致列车振动及轨道不平顺决定;车体横向及竖向加速度功率谱密度分布与轨道不平顺的波长密切相关,其对应的敏感波长区间均小于120 m;车体横向及竖向加速度主要受车辆荷载作用引起的桥梁变形影响,而风荷载引起的桥梁变形主要分布于主跨范围内,波长大于120 m,因而未对列车车体加速度产生显著影响.
Abstract:In order to explore the influence mechanism of arch bridge deformation on the running stability of the train under crosswind, the horizontal and vertical displacement of the mid-span was obtained through the wind, vehicle, and bridge coupling system, and the running stability of the train under different wind speeds and train speeds was analyzed. The contribution of bridge deformation to horizontal and vertical acceleration of the train in the wind, vehicle, and bridge system was quantified. Combined with the sensitive wavelength of the acceleration response of the train and the time-frequency characteristic of bridge deformation, the influence mechanism of bridge deformation on running stability was analyzed. The results show that the vertical displacement difference of the bridge is smaller than the horizontal displacement difference, and the main displacement is caused by the vehicle-induced bridge deformation. The maximum value reaches −9.2 mm. Under the action of train and wind load, the horizontal and vertical displacement of the bridge is more significant, but its influence on the stability of the train is mainly reflected in the position of the junction pier, which is about four times the response of other positions. Except for the junction pier area, the running stability of the train on the bridge is mainly determined by the wind-induced train vibration and track irregularity. The spectral density distribution of horizontal and vertical acceleration power of the train is closely related to the wavelength of track irregularity, and the corresponding sensitive wavelength range is less than 120 m. The horizontal and vertical acceleration of the train is mainly affected by the bridge deformation caused by the vehicle load, while the bridge deformation caused by wind load is mainly distributed in the main span, and the wavelength is larger than 120 m. Therefore, it does not exert a significant impact on the acceleration of the train.
-
Key words:
- high-speed train /
- running stability /
- bridge deformation /
- wind load /
- wind, vehicle, and bridge system
-
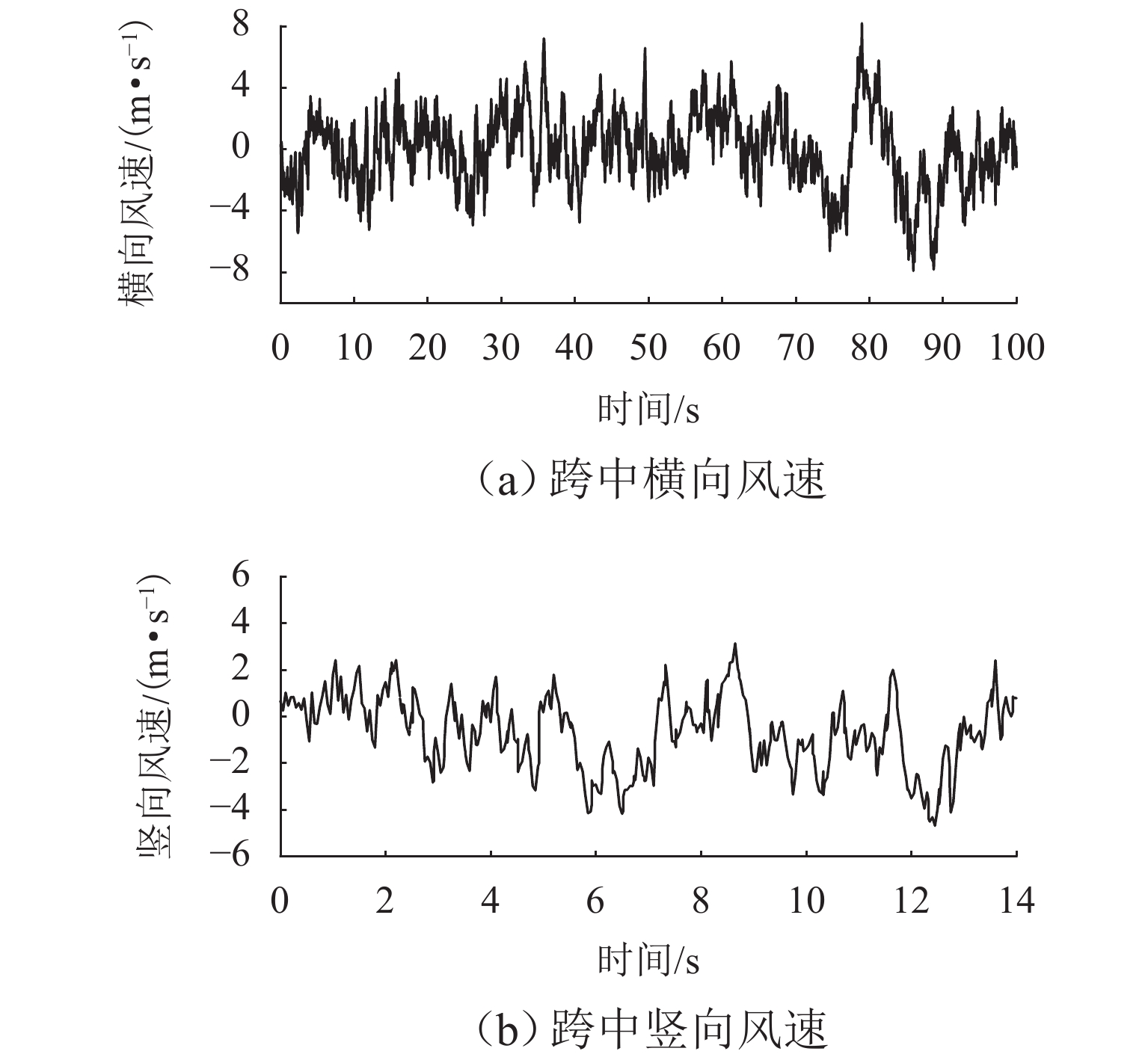
图 3 桥面脉动风速与行进列车仿真时程
Figure 3. Simulated time history of fluctuating wind speed and running train at bridge deck
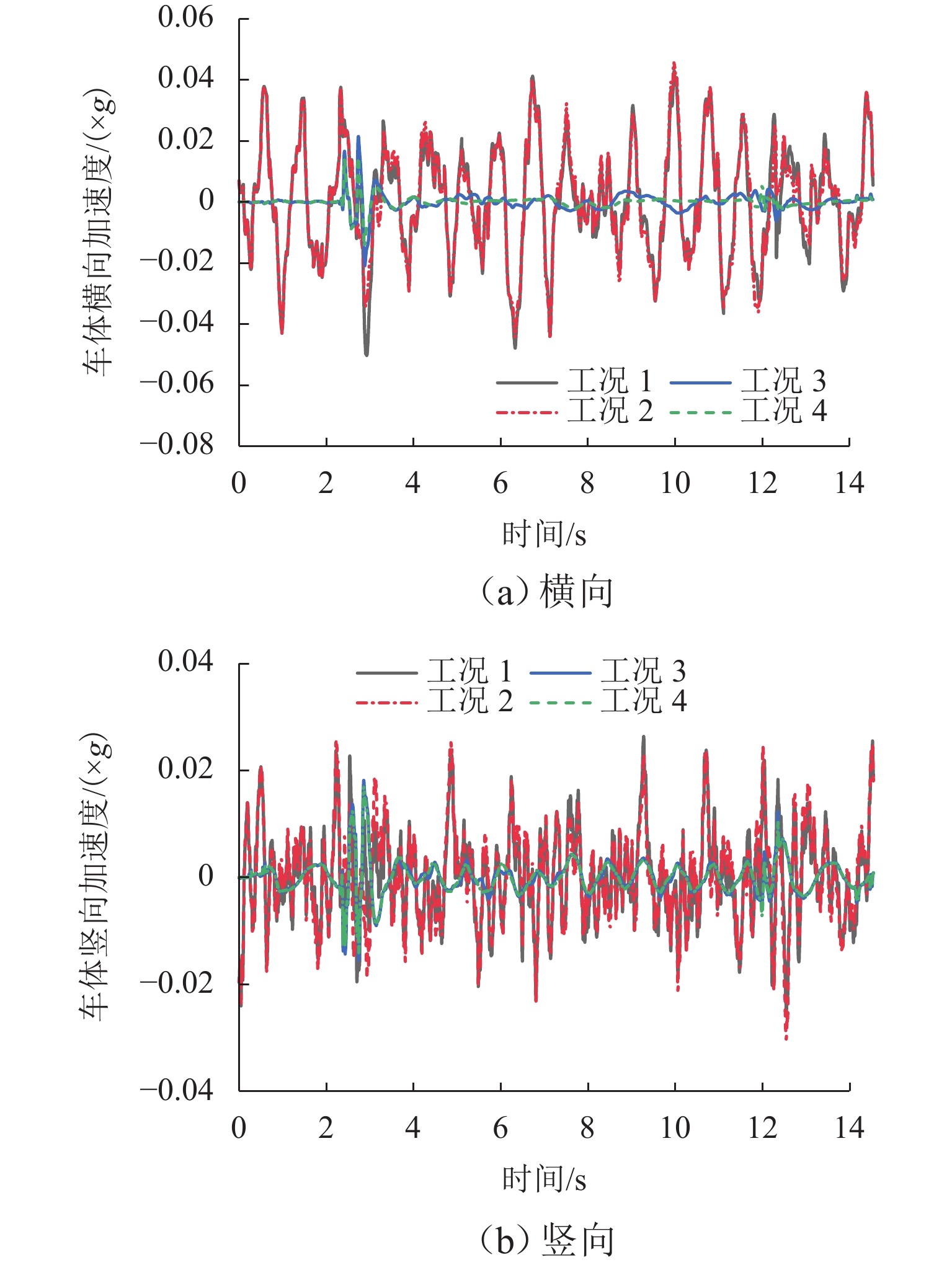
图 5 车体横、竖向加速度时程图
Figure 5. Time history of horizontal and vertical accelerations of train
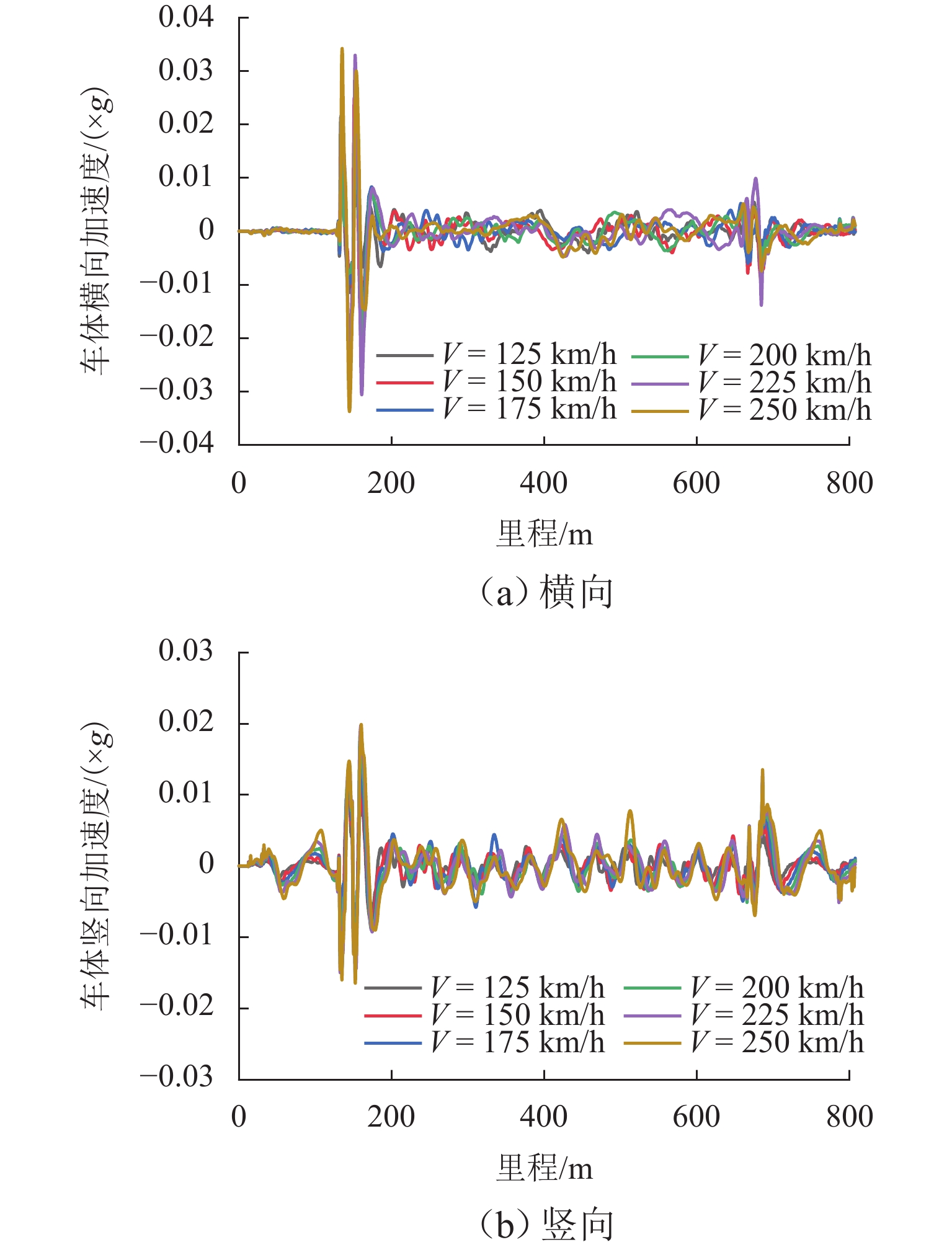
图 6 车速对工况3车体横、竖向加速度影响
Figure 6. Influence of train speed on horizontal and vertical accelerations of train under working condition No.3
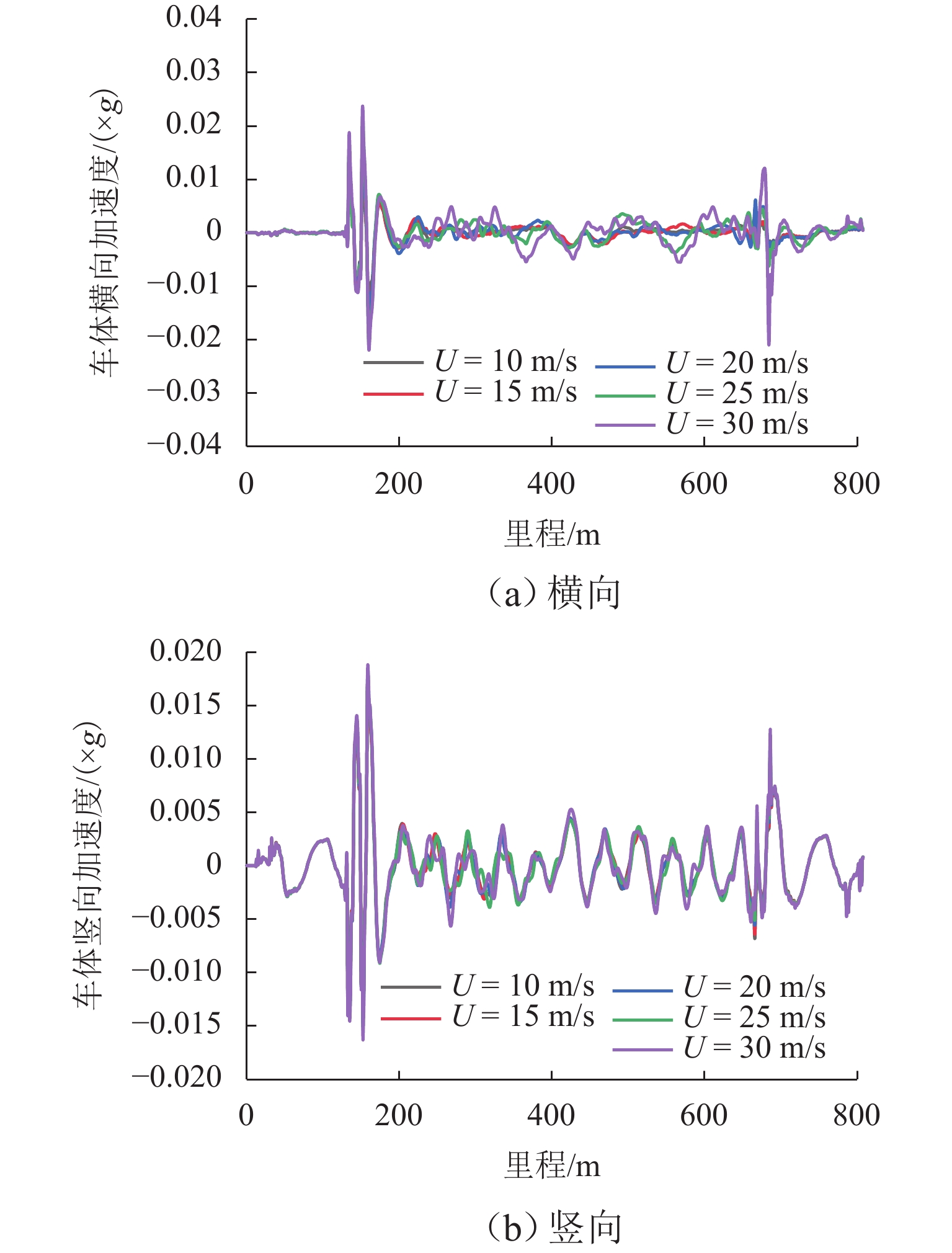
图 7 风速对工况3车体横、竖向加速度影响
Figure 7. Influence of wind speed on horizontal and vertical accelerations of train under working condition No. 3
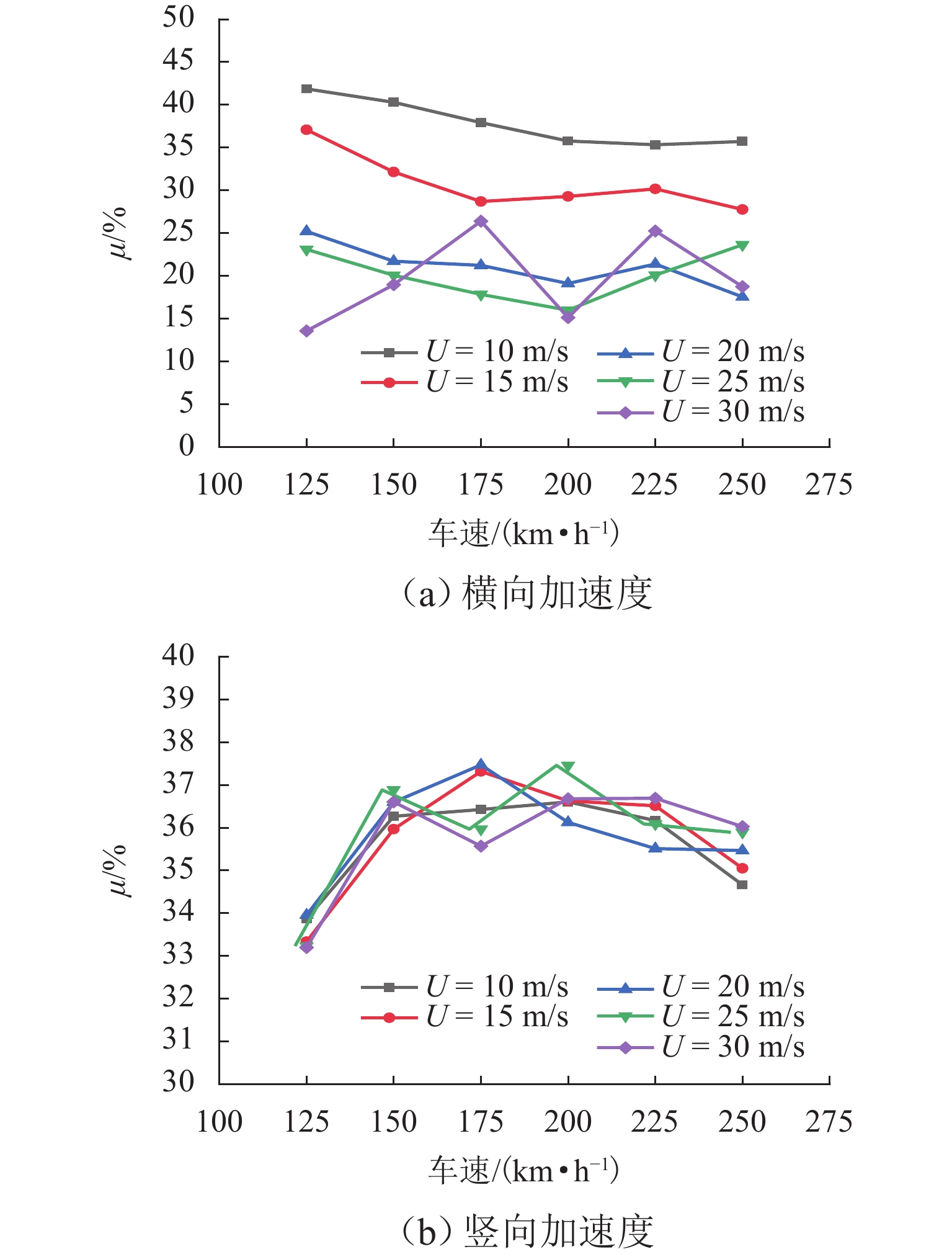
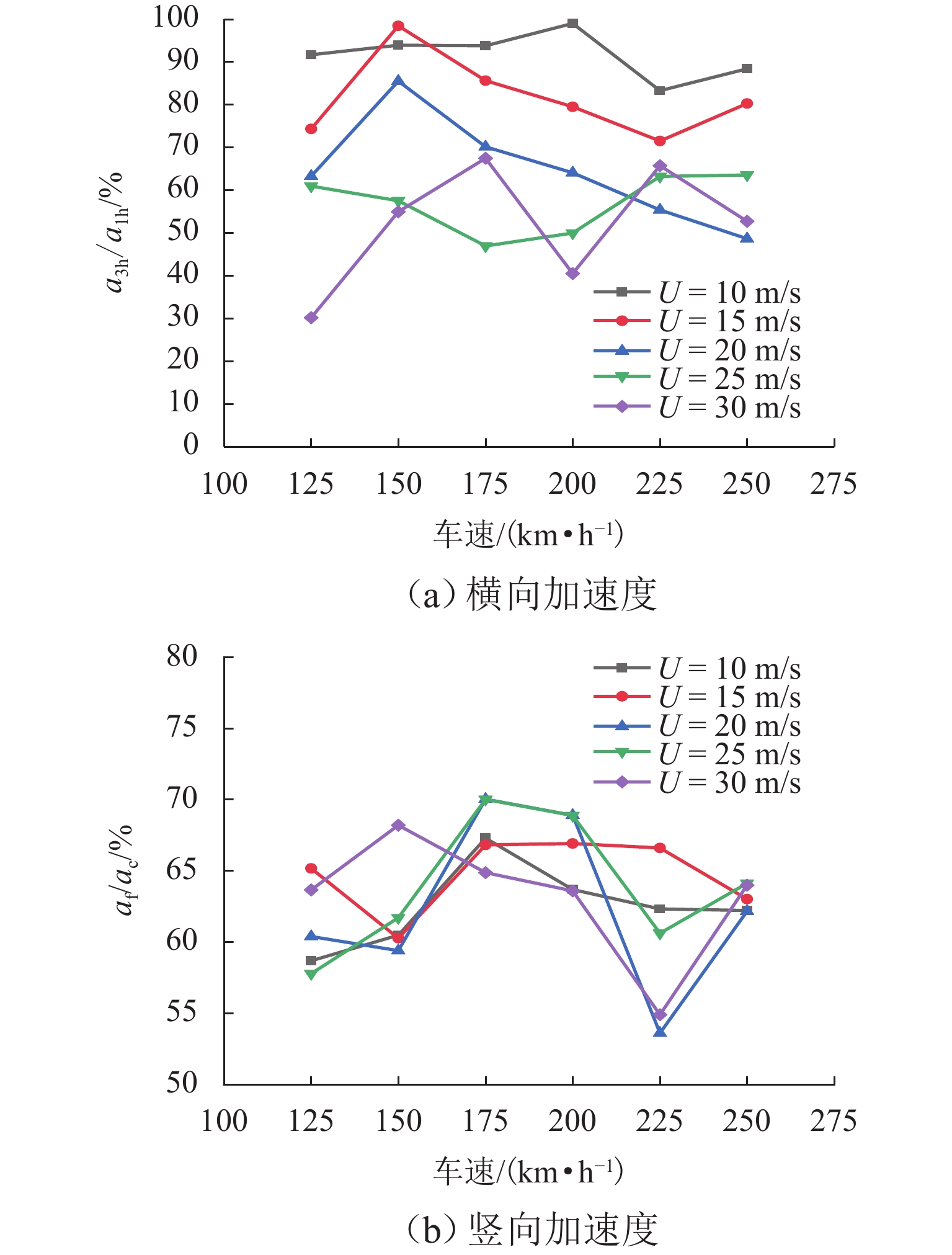
图 8 横、竖向加速度标准差占比统计
Figure 8. Standard deviation ratio of horizontal and vertical accelerations
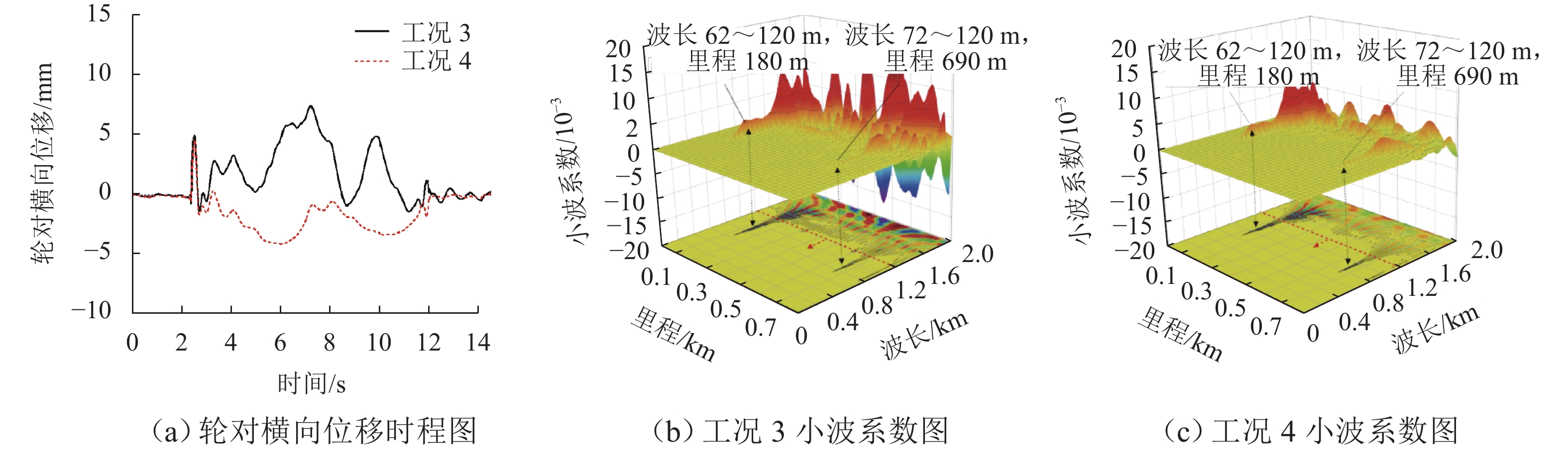
图 11 轮对横向位移时程与小波系数图
Figure 11. Time history of wheel set horizontal displacement and wavelet coefficients
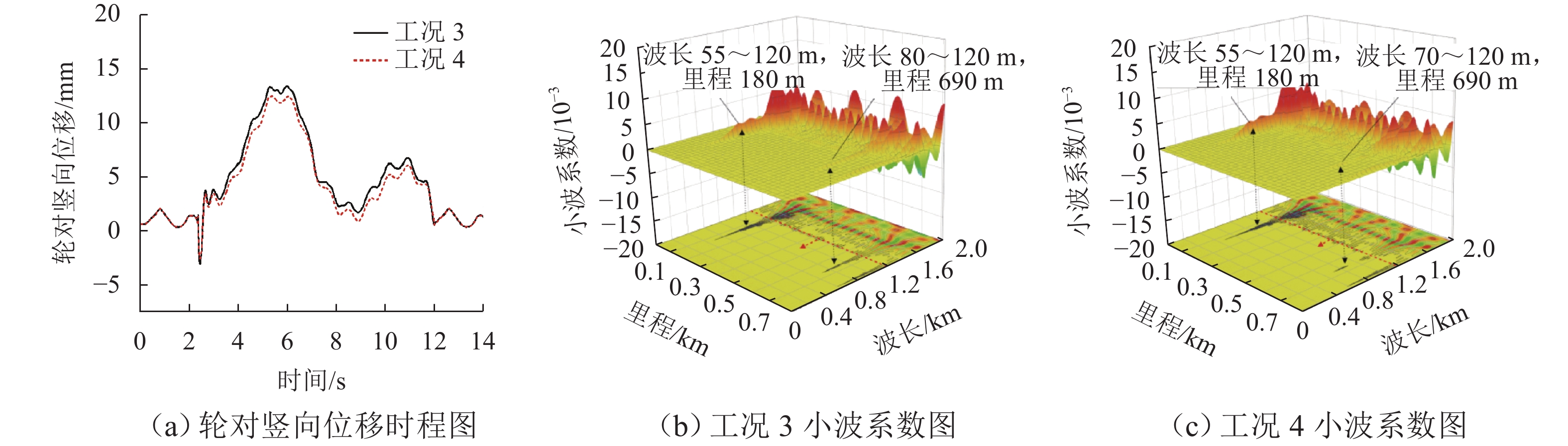
图 12 轮对竖向位移时程和小波系数图
Figure 12. Time history of wheel set vertical displacement and wavelet coefficients
表 1 列车自振特性
Table 1. Vibration characteristics of the train
阶数 频率/Hz 振型描述 1 0.451 车体绕下心 2 0.803 车体绕上心 3 0.840 车体沉浮 4 0.878 车体摇头 5 1.056 车体点头  下载: 导出CSV
下载: 导出CSV
表 2 风-车-桥系统气动参数
Table 2. Aerodynamic parameters of wind-vehicle-bridge system
对象 CD CL CM 主梁 1.098 0.010 −0.036 列车 1.257 0.070 0.068 拱肋 0.600
下载: 导出CSV
表 3 风-车-桥耦合系统计算工况
Table 3. Working conditions of wind-vehicle-bridge coupling system
工况 车辆风荷载 轨道不平顺 桥梁风荷载 桥梁位移 工况 1 √ √ √ √ 工况 2 √ √ 工况 3 √ √ 工况 4 √
下载: 导出CSV
-
[1] TAN Y B, HE X W, SHI L, et al. Reinforcement effect evaluation on dynamic characteristics of an arch bridge based on vehicle-bridge coupled vibration analysis[J]. Computer Modeling in Engineering & Sciences, 2022, 131(2): 1041-1061. [2] 唐俊峰,何玮,郭向荣,等. 风攻角对强风下大跨度斜拉桥车-桥耦合振动的影响[J]. 中南大学学报(自然科学版),2018,49(7): 1760-1767.TANG Junfeng, HE Wei, GUO Xiangrong, et al. Influence of wind attack angle on vehicle-bridge coupling vibration for long-span cable-stayed bridge during strong wind[J]. Journal of Central South University (Science and Technology), 2018, 49(7): 1760-1767. [3] 徐昕宇. 复杂山区铁路风—车—桥系统耦合振动研究[D]. 成都: 西南交通大学, 2017. [4] QIN S Q, FENG J C, ZHOU Y L, et al. Investigation on the dynamic impact factor of a concrete filled steel tube butterfly arch bridge[J]. Engineering Structures, 2022, 252: 113614.1-113614.14. [5] JING H M, LIAO H L, MA C M, et al. Field measurement study of wind characteristics at different measuring positions in a mountainous valley[J]. Experimental Thermal and Fluid Science, 2020, 112: 109991.1-109991.18. [6] LIU C, FU L, YANG D, et al. Non-gaussian Lagrangian stochastic model for wind field simulation in the surface layer[J]. Advances in Atmospheric Sciences, 2020, 37(1): 90-104. doi: 10.1007/s00376-019-9052-7 [7] 靖洪淼,廖海黎,周强,等. 一种山区峡谷桥址区风场特性数值模拟方法[J]. 振动与冲击,2019,38(16): 200-207.JING Hongmiao, LIAO Haili, ZHOU Qiang, et al. A numerical simulation method for wind field characteristics of mountainous valley at bridge site[J]. Journal of Vibration and Shock, 2019, 38(16): 200-207. [8] 沈炼,华旭刚,韩艳,等. 高精度入口边界的峡谷桥址风场数值模拟[J]. 中国公路学报,2020,33(7): 114-123.SHEN Lian, HUA Xugang, HAN Yan, et al. Numerical simulation of wind field at canyon bridges with high precision inlet boundary[J]. China Journal of Highway and Transport, 2020, 33(7): 114-123. [9] LI X Z, TAN Y L, QIU X W, et al. Wind tunnel measurement of aerodynamic characteristics of trains passing each other on a simply supported box girder bridge[J]. Railway Engineering Science, 2021, 29(2): 152-162. doi: 10.1007/s40534-021-00231-4 [10] HE X H, LI H, HU L, et al. Crosswind aerodynamic characteristics of a stationary interior railway carriage through a long-span truss-girder bridge[J]. Engineering Structures, 2020, 210: 110350.1-110350.19. [11] MA C M, PEI C, LIAO H L, et al. Field measurement and wind tunnel study of aerodynamic characteristics of twin-box girder[J]. Journal of Wind Engineering and Industrial Aerodynamics, 2020, 202: 104209.1-104209.14. [12] 于洪刚. 大跨度拱桥气动参数识别及风致响应研究[D]. 上海: 同济大学, 2008. [13] 李永乐,房忱,向活跃. 风-浪联合作用下大跨度桥梁车-桥耦合振动分析[J]. 中国公路学报,2018,31(7): 119-125.LI Yongle, FANG Chen, XIANG Huoyue. Coupled vibration analysis of vehicle-bridge for long-span bridge under wind and wave[J]. China Journal of Highway and Transport, 2018, 31(7): 119-125. [14] 韩万水,刘焕举,包大海,等. 大跨钢桁梁悬索桥风-车-桥分析系统建立与可视化实现[J]. 土木工程学报,2018,51(3): 99-108.HAN Wanshui, LIU Huanju, BAO Dahai, et al. Establishment and visualization of wind-vehicle-bridge analysis system for the large-span steel truss suspension bridge[J]. China Civil Engineering Journal, 2018, 51(3): 99-108. [15] 韩艳,陈浩,刘跃飞,等. 桥梁抖振力空间相关性对风-车-桥耦合动力响应的影响[J]. 湖南大学学报(自然科学版),2015,42(9): 82-88.HAN Yan, CHEN Hao, LIU Yuefei, et al. Effect of the coherence of buffeting forces of bridges on the coupled dynamic responses of wind-vehicle-bridge system[J]. Journal of Hunan University (Natural Sciences), 2015, 42(9): 82-88. [16] 李沅璋. 基于梁格法的刚构拱桥静动力力学性能分析[D]. 北京: 北京交通大学, 2017. [17] 刘德军. 风-列车-线路-桥梁系统耦合振动研究[D]. 成都: 西南交通大学, 2010. [18] 辛莉峰,李小珍,朱艳. 基于eFAST方法的车—线—桥耦合系统全局敏感性分析[J]. 中国铁道科学,2019,40(4): 46-51.XIN Lifeng, LI Xiaozhen, ZHU Yan. Global sensitivity analysis of vehicle-track-bridge coupling system based on eFAST method[J]. China Railway Science, 2019, 40(4): 46-51. [19] 徐磊,翟婉明. 横风和轨道不平顺联合作用下的车辆-轨道系统随机分析模型[J]. 振动工程学报,2018,31(1): 39-48.XU Lei, ZHAI Wanming. The vehicle-track stochastic model considering joint effects of cross-winds and track random irregularities[J]. Journal of Vibration Engineering, 2018, 31(1): 39-48. [20] BULJAC A, KOZMAR H, POSPÍŠIL S, et al. Effects of wind-barrier layout and wind turbulence on aerodynamic stability of cable-supported bridges[J]. Journal of Bridge Engineering, 2020, 25(12): 04020102.1-04020102.18. [21] 中华人民共和国交通运输部. 公路桥梁抗风设计规范: JTG/T 3360-01—2018[S]. 北京: 人民交通出版社, 2018. [22] 宋玉鹏,陈建兵,彭勇波. 二维空间脉动风场波数-频率联合功率谱表达的FFT模拟[J]. 振动工程学报,2020,33(4): 660-666.SONG Yupeng, CHEN Jianbing, PENG Yongbo. Simulation of fluctuating wind field in two-spatial dimensions by FFT implementation of wavenumber-frequency joint power spectrum[J]. Journal of Vibration Engineering, 2020, 33(4): 660-666. [23] 李小珍, 张效邦, 郑净, 等. 400 km/h高铁桥上直立式声屏障的列车风致振动[J]. 西南交通大学学报, 2024, 59(6): 1415-1422LI Xiaozhen, ZHANG Xiaobang, ZHENG Jing, et al. Wind-induced vibration of 400 km/h trains with vertical soundbarrier on highspeed railway bridge[J]. Journal of Southwest Jiaotong University, 2024, 59(6): 1415-1422 [24] 陈士军,凌贤长,朱占元,等. 轨道高低不平顺谱分析[J]. 地震工程与工程振动,2012,32(5): 33-38.CHEN Shijun, LING Xianchang, ZHU Zhanyuan, et al. Analyses of track vertical profile irregularity spectra[J]. Journal of Earthquake Engineering and Engineering Vibration, 2012, 32(5): 33-38. -

 下载:
下载:

 点击查看大图
点击查看大图

计量
- 文章访问数: 767
- HTML全文浏览量: 317
- PDF下载量: 146
- 被引次数: 0