

Method of Splicing Constant Speed Signals with Short Signals During Wheelset Acceleration and Deceleration
-
摘要:
列车轮对的特征值与转速密切相关,进行轮对故障定量分析时需要采集某转速下一定长度的信号,而实际工作于变速工况的系统难以方便获得该信号,为满足定量分析的要求,提出一种不需要转速计的信号重构方法,该方法利用升降速工况下的短信号片段拼接成指定转速下的定速信号. 首先,采用STFT (short-time Fourier transform)峰值搜索方法获取转速曲线,并提取通过指定转速的多个信号片段;其次,将信号片段转换成角域信号,并通过互功率谱密度确定信号间的相位差,根据相位差和前信号的长度,得到信号间的拼接位置,并采用插值和融合技术保证拼接信号的连续性;最后,将拼接得到的角域信号恢复成时域信号. 经与轮对结构相似的转子实验台实验验证:某裂纹轴在升降速过程中,使用本方法获得的各转速拼接信号频谱和实验获得的定速信号频谱高度接近,其中15.0 Hz拼接信号与定速信号1
x 、3x 值(1x 和3x 表示转速的1倍频和3倍频)的相对误差仅为0.9%、1.0%,将待拼接信号加入噪声且缩短到1.5个周期后,拼接相位误差不超过10°.Abstract:The characteristic value of train wheelsets is closely related to the speed, and the quantitative analysis of wheelset faults requires signals with a certain length collected at a certain speed. However, such a signal is difficult to be obtained by the system working in the variable speed condition. Therefore, a signal reconstruction method that did not require any velocimeters was proposed to realize the above quantitative analysis. This method used short signal segments to splice the constant speed signals under the acceleration and deceleration conditions. Firstly, a short-time Fourier transform (STFT) peak search method was adopted to obtain the speed curve and extract multiple signal segments passing through a specified speed. Secondly, the signal segments were converted into an angular domain signal, and the phase difference between signals was determined by cross-power spectra density (CPSD). Then, according to the phase difference and the length of the front signal, the splicing position of signals was obtained, and interpolation and fusion techniques were used to ensure the continuity of spliced signals. Finally, the spliced angular domain signal was resampled into the time domain signal. A rotor test bench with a similar wheelset structure has verified that during acceleration and deceleration of a cracked shaft, the frequency spectrums of the spliced signals of each speed obtained by this method are highly close to the frequency spectrums of the constant speed signals obtained by the experiment. The relative errors of the 1
x and 3x values between the spliced signal of 15.0 Hz and the constant speed signal are only 0.9% and 1.0%, respectively. After adding noise to the signals to be spliced and shortening them to 1.5 cycles, the splicing phase error does not exceed 10°. -
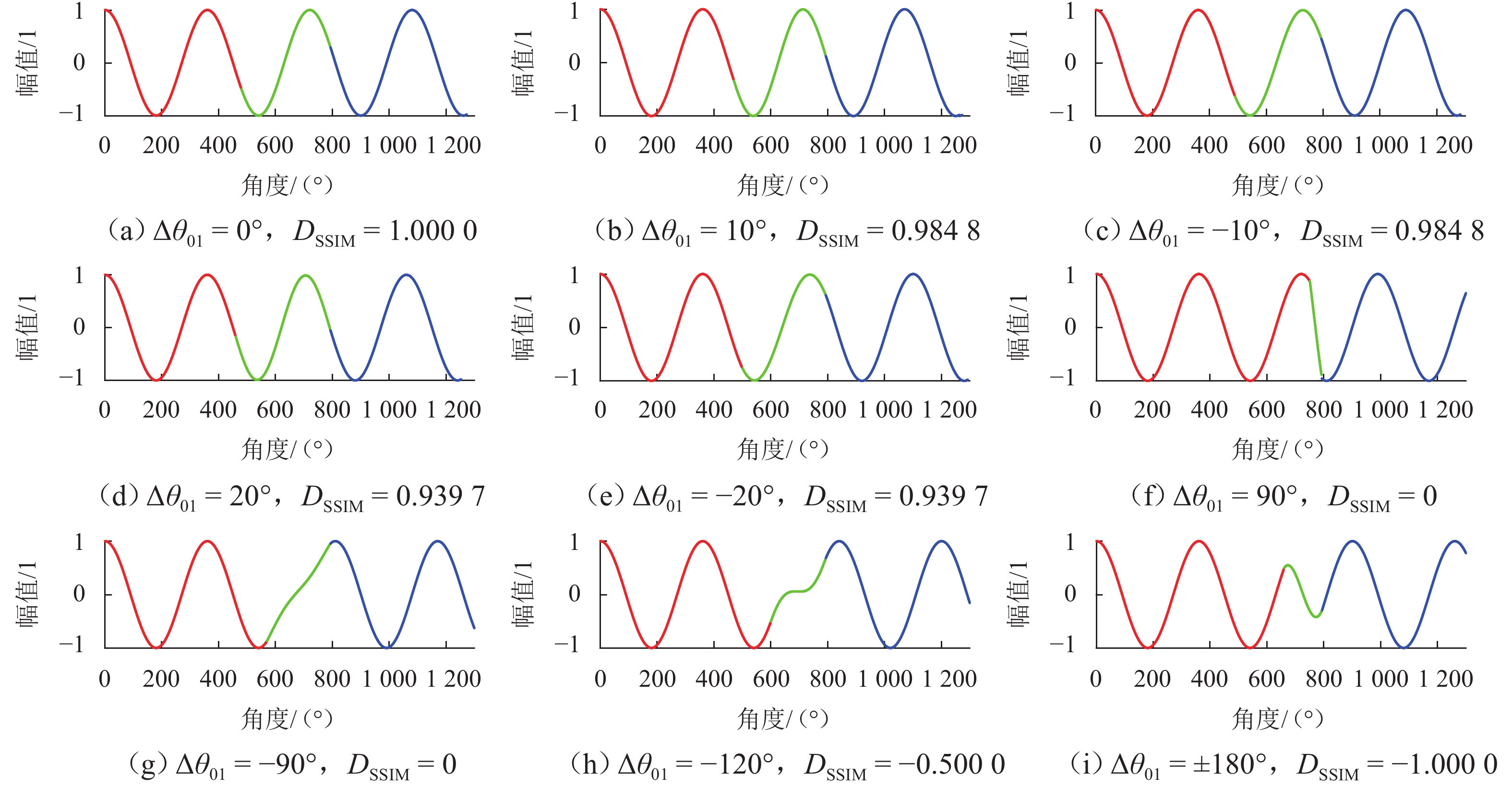
图 4 信号不同拼接误差的连接情况和DSSIM值
Figure 4. Signal connection and DSSIM value of different splicing errors

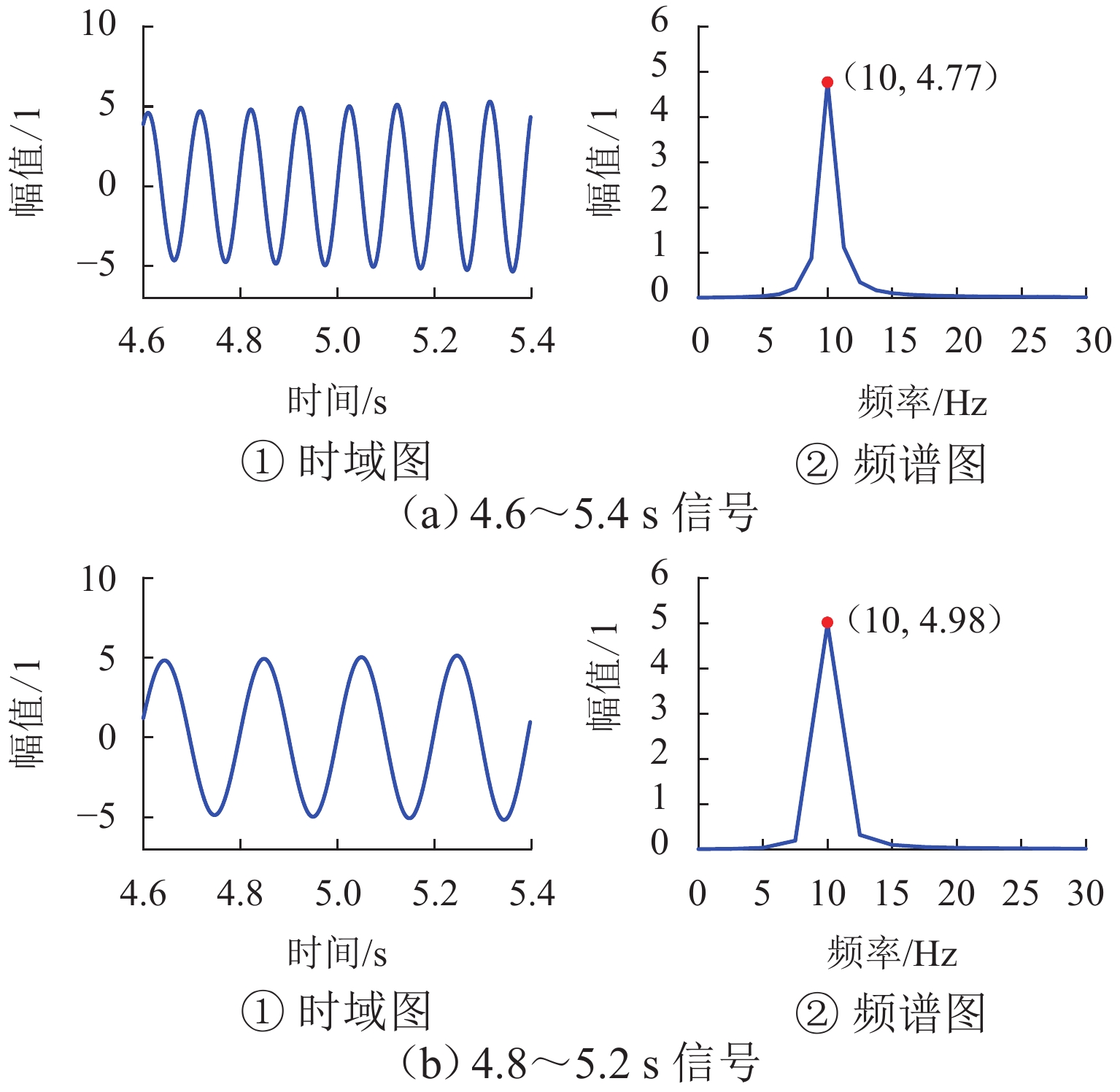
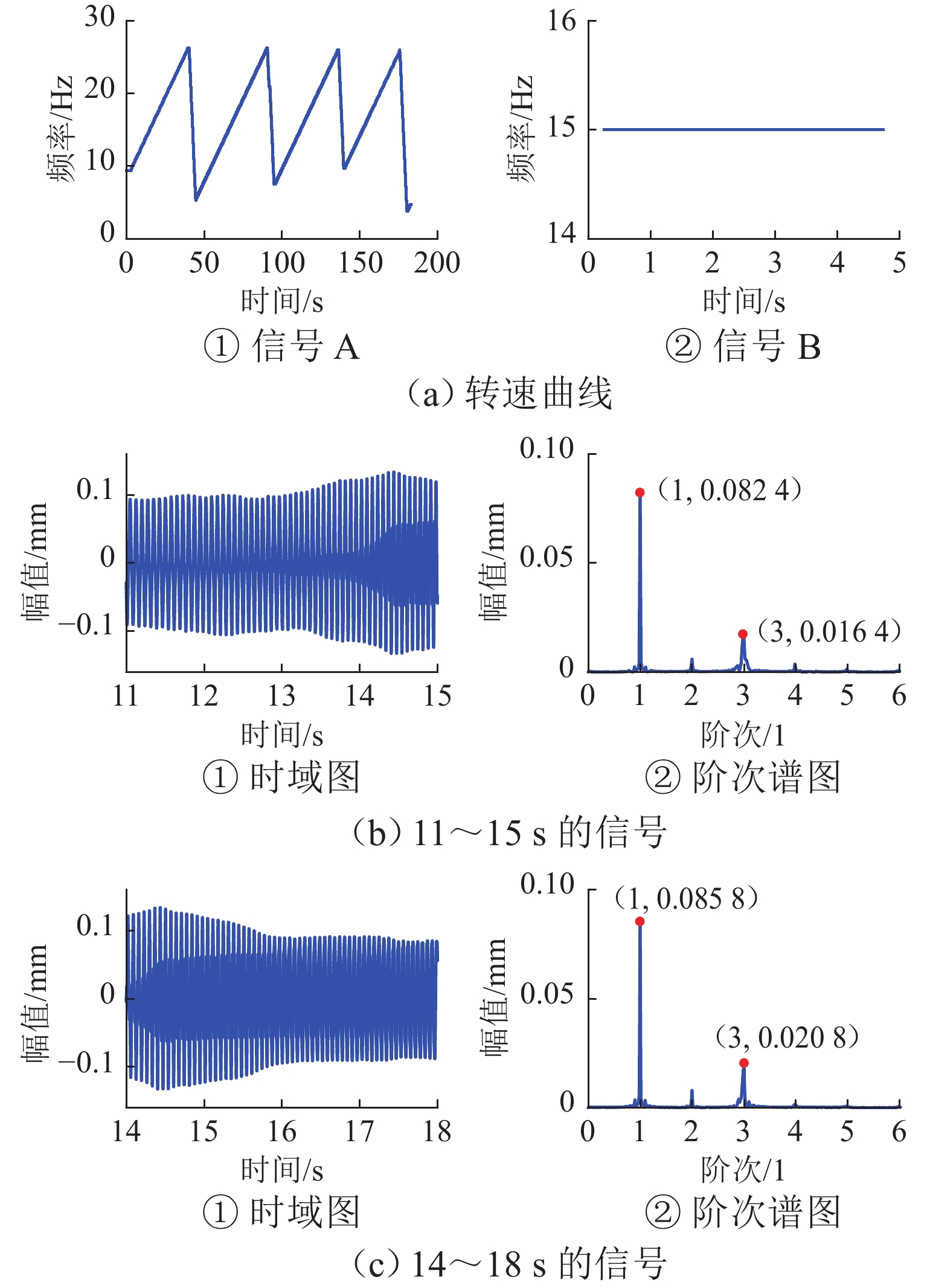
图 7 升降速信号和15 Hz定速信号的对比
Figure 7. Comparison of acceleration and deceleration signal and constant speed signal of 15 Hz
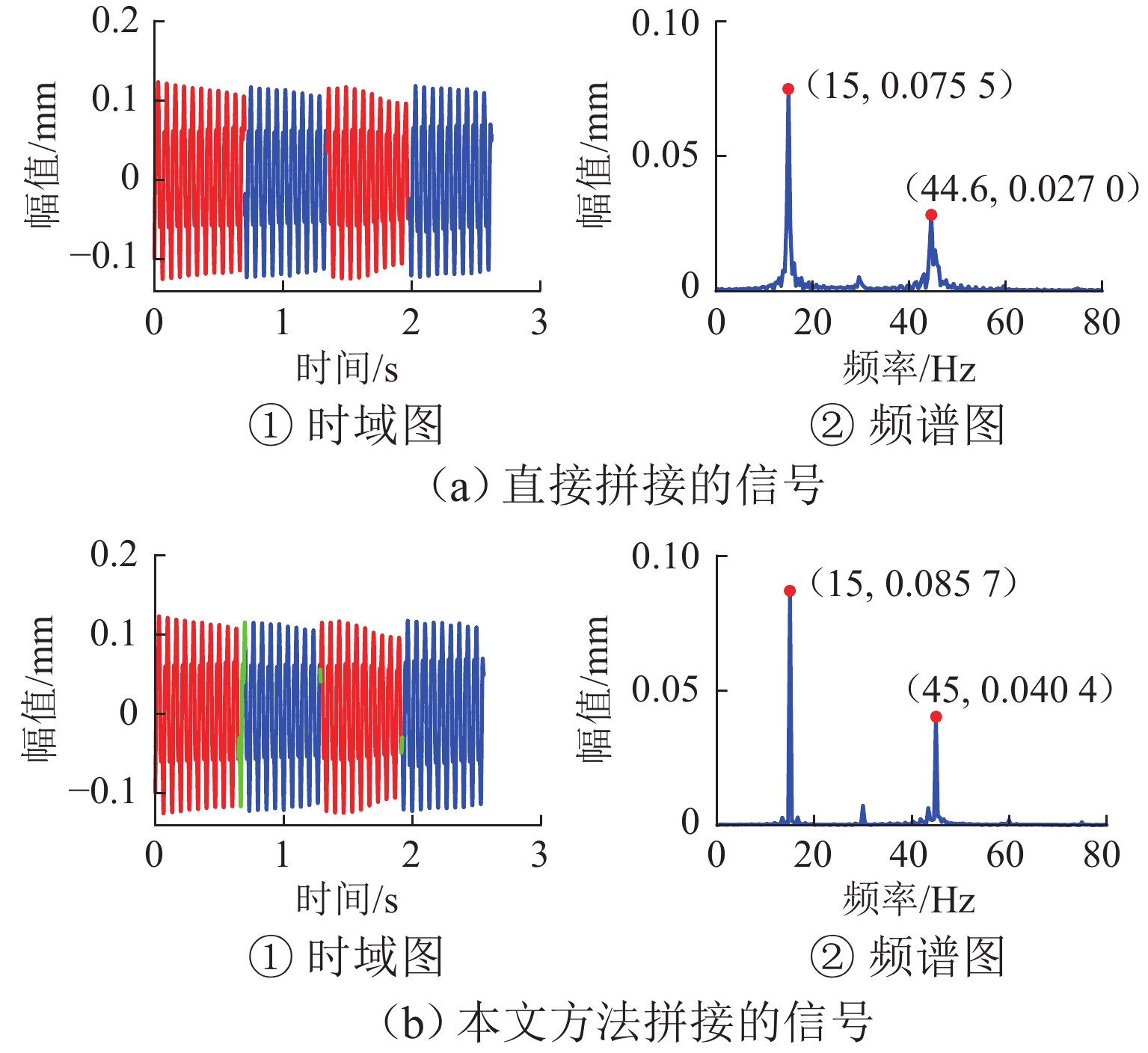
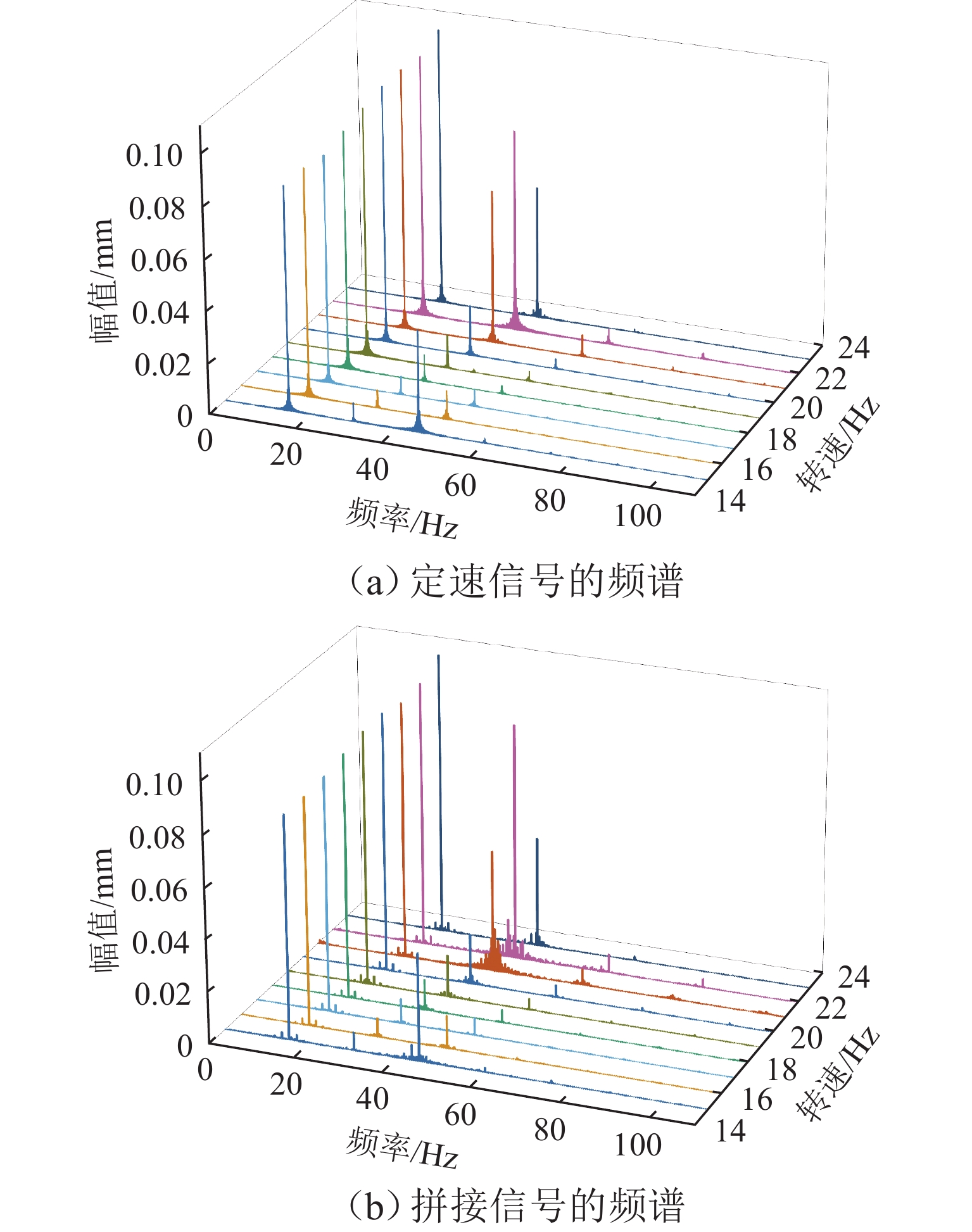
图 10 直接拼接和本文方法拼接结果对比
Figure 10. Comparison between direct splicing and the proposed method
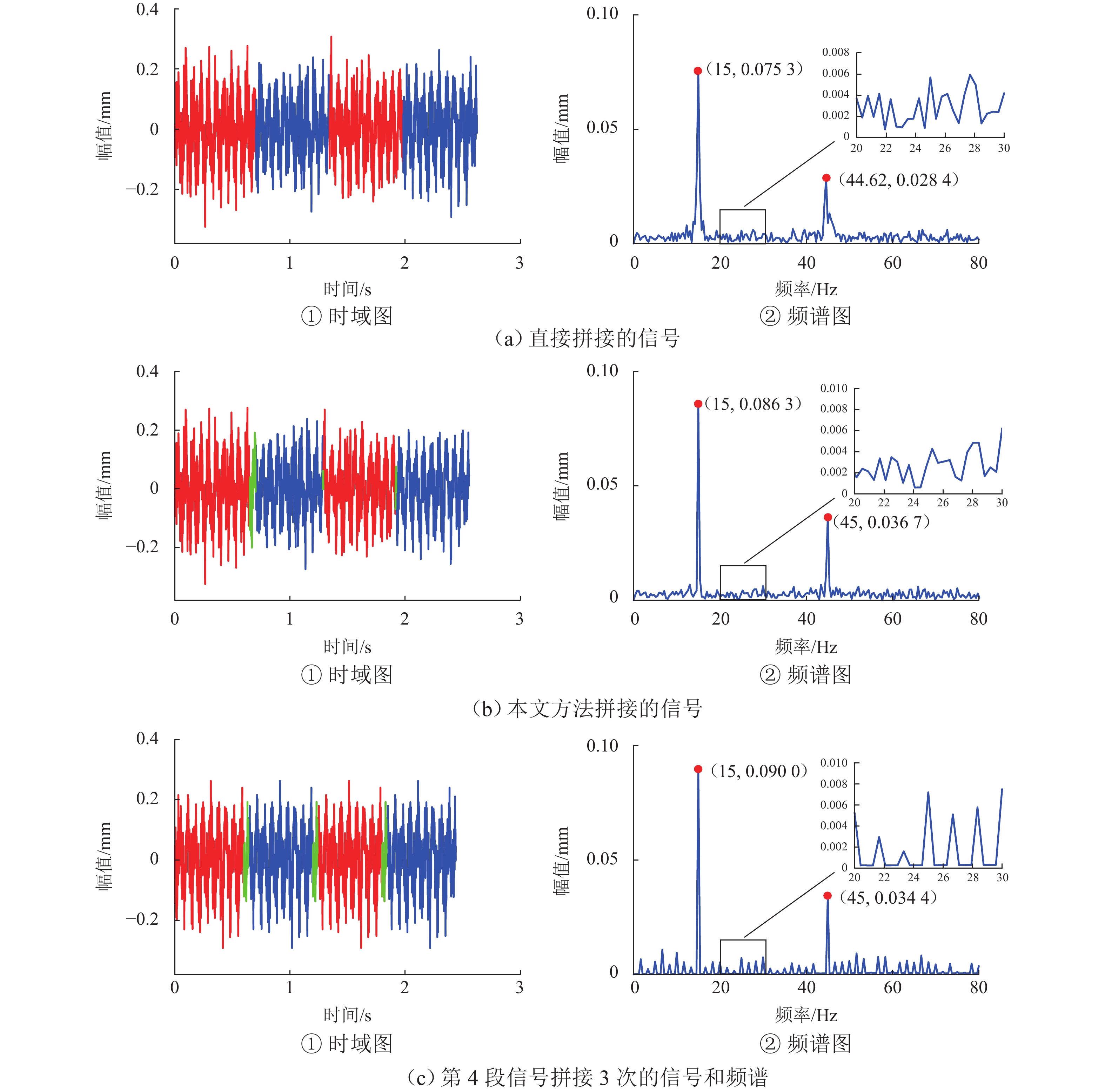
图 11 加噪声后直接拼接和本文方法拼接的对比
Figure 11. Comparison of direct splicing and the proposed method after adding noise
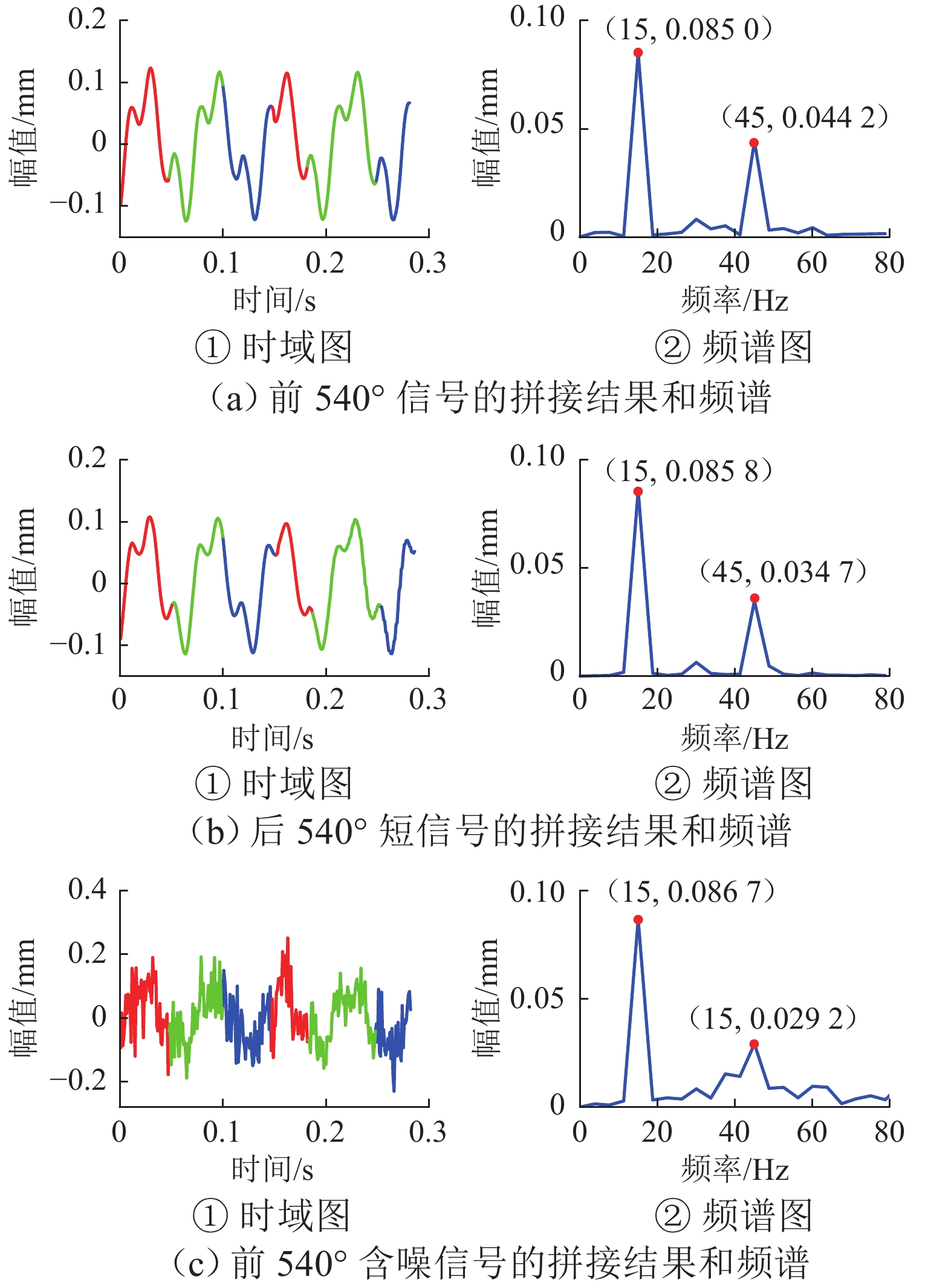
图 12 缩短信号后本方法拼接的结果
Figure 12. Splicing results of the proposed method after shortening the signal
-
[1] 杨云帆,周青,巩磊,等. 轮对柔性对直线电机车辆动态响应的影响分析[J]. 西南交通大学学报,2020,55(6): 1313-1319.YANG Yunfan, ZHOU Qing, GONG Lei, et al. Influence of wheelset flexibility on dynamic response of linear induction motor vehicles[J]. Journal of Southwest Jiaotong University, 2020, 55(6): 1313-1319. [2] 宋志坤,岳仁法,胡晓依,等. 车轮多边形对车辆振动及轮轨力的影响[J]. 北京交通大学学报,2017,41(6): 88-93.SONG Zhikun, YUE Renfa, HU Xiaoyi, et al. Influence of wheel polygon on vehicle vibration and wheel/rail force[J]. Journal of Beijing Jiaotong University, 2017, 41(6): 88-93. [3] HASSAN M, BRUNI S. Experimental and numerical investigation of the possibilities for the structural health monitoring of railway axles based on acceleration measurements[J]. Structural Health Monitoring, 2019, 18(3): 902-919. doi: 10.1177/1475921718786427 [4] 黄采伦,陈春阳,樊晓平,等. 列车车轴裂纹的振动特性分析及在线监测方法[J]. 中国铁道科学,2007,28(5): 83-88.HUANG Cailun, CHEN Chunyang, FAN Xiaoping, et al. Vibration characteristic analysis of train axle crack and its on-line monitoring method[J]. China Railway Science, 2007, 28(5): 83-88. [5] 黄采伦,樊晓平,张剑,等. 机车走行部故障在线诊断的特征分析方法研究[J]. 仪器仪表学报,2007,28(6): 1007-1011.HUANG Cailun, FAN Xiaoping, ZHANG Jian, et al. Online fault diagnosis method for train running gear based on characteristic analysis[J]. Chinese Journal of Scientific Instrument, 2007, 28(6): 1007-1011. [6] WANG D Y, HUA C R, DONG D W, et al. Crack parameters identification based on a kriging surrogate model for operating rotors[J]. Shock and Vibration, 2018, 2018: 1-12. [7] 梅检民,肖云魁,贾继德,等. 基于改进阶比的变速器微弱故障特征提取[J]. 振动工程学报,2012,25(3): 317-322.MEI Jianmin, XIAO Yunkui, JIA Jide, et al. Weak fault characteristics extraction for automobile transmission based on improved order analysis[J]. Journal of Vibration Engineering, 2012, 25(3): 317-322. [8] 杨炯明,秦树人,季忠. 旋转机械阶比分析技术中阶比采样实现方式的研究[J]. 中国机械工程,2005,16(3): 249-253.YANG Jiongming, QIN Shuren, JI Zhong. Research on the methods to implement order sampling in rotating machinery order analysis technique[J]. China Mechanical Engineering, 2005, 16(3): 249-253. [9] 邓蕾,傅炜娜,董绍江,等. 无转速计的旋转机械Vold-Kalman阶比跟踪研究[J]. 振动与冲击,2011,30(3): 5-9.DENG Lei, FU Weina, DONG Shaojiang, et al. Tacholess Vold-Kalman order tracking of rotating machinery[J]. Journal of Vibration and Shock, 2011, 30(3): 5-9. [10] 陈向民,于德介,任凌志,等. 基于线调频小波路径追踪阶比能量解调的齿轮轮齿裂纹故障诊断[J]. 中国机械工程,2011,22(21): 2598-2603.CHEN Xiangmin, YU Dejie, REN Lingzhi, et al. Order energy demodulating approach based on chirplet path pursuit and its application to gear tooth crack fault diagnosis[J]. China Mechanical Engineering, 2011, 22(21): 2598-2603. [11] ZHAO M, LIN J, WANG X F, et al. A tacho-less order tracking technique for large speed variations[J]. Mechanical Systems and Signal Processing, 2013, 40(1): 76-90. doi: 10.1016/j.ymssp.2013.03.024 [12] 曲兴华,职广涛,张福民,等. 利用信号拼接提高调频连续波激光测距系统的分辨力[J]. 光学 精密工程,2015,23(1): 40-47. doi: 10.3788/OPE.20152301.0040QU Xinghua, ZHI Guangtao, ZHANG Fumin, et al. Improvement of resolution of frequency modulated continuous wave laser ranging system by signal splicing[J]. Optics and Precision Engineering, 2015, 23(1): 40-47. doi: 10.3788/OPE.20152301.0040 [13] 黄洋. 全景图像拼接算法研究[D]. 西安: 西安电子科技大学, 2013. [14] SZELISKI R. Video mosaics for virtual environments[J]. IEEE Computer Graphics and Applications, 1996, 16(2): 22-30. doi: 10.1109/38.486677 [15] SHUM H Y, SZELISKI R. Panoramic image mosaics[J]. Microsoft Research, 1997, 36(2): 101-130. [16] WANG Z, BOVIK A C, SHEIKH H R, et al. Image quality assessment: from error visibility to structural similarity[J]. IEEE Transactions on Image Processing: a Publication of the IEEE Signal Processing Society, 2004, 13(4): 600-612. doi: 10.1109/TIP.2003.819861 [17] PENNACCHI P, BACHSCHMID N, VANIA A. A model-based identification method of transverse cracks in rotating shafts suitable for industrial machines[J]. Mechanical Systems and Signal Processing, 2006, 20(8): 2112-2147. doi: 10.1016/j.ymssp.2005.04.005 -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 416
- HTML全文浏览量: 230
- PDF下载量: 61
- 被引次数: 0