

Gait Properties of Passive Walking Robots with Bionic Torso
-
摘要:
为改善被动行走机器人的步态特性,受人体躯干同时具有刚性骨骼和柔性软组织启发,提出一种带刚柔仿生躯干的被动行走机器人模型,并研究其非线性动力学特性. 将仿生躯干柔性部分等效为带质量的弹簧阻尼器,建立仿生躯干被动行走机器人的动力学模型. 分别分析仿生躯干的等效弹性系数、等效阻尼系数、等效质量对被动行走机器人的行走步长和步行速度的影响规律,并与刚性躯干模型的结果进行对比. 研究结果表明:相比于刚体躯干,仿生躯干使得被动行走具有更加丰富的步态行为;仿生躯干柔性不仅影响被动行走的行走步长及行走速度,还影响被动行走的稳定性;适当的躯干柔性可以在维持稳定周期步态的同时,提高被动行走机器人的行走步长及步行速度;与刚性躯干相比,带仿生躯干的被动行走步长能提高12%,行走速度能提高2%.
Abstract:Inspired by the fact that a human torso has both rigid skeletons and flexible internal organs, a passive walking robot model with a rigid and flexible bionic torso was proposed to improve the gait property of the robot, and the nonlinear dynamic properties of the robot were studied. First, the dynamic equations of the passive walking robot with a bionic torso were established by considering the flexible part of the torso as a mass-spring-dashpot system. Then, the effects of the equivalent elasticity coefficient, damping coefficient, and mass of the bionic torso on walking step length and walking speed of the robot were investigated respectively. The results show that compared with the rigid torso, the bionic torso enables a more abundant gait behavior for a passive walking robot. The flexibility of the bionic torso affects the walking step length, walking speed, and walking stability of a passive walking robot. With appropriate torso flexibility, the walking step length and walking speed of the robot can be improved while the stable periodic gait remains. Compared with the rigid torso, the walking step length and walking speed of the robot with a bionic torso can be increased by 12% and 2%, respectively.
-
Key words:
- walking robot /
- passive walking /
- torso /
- flexibility /
- gait properties
-
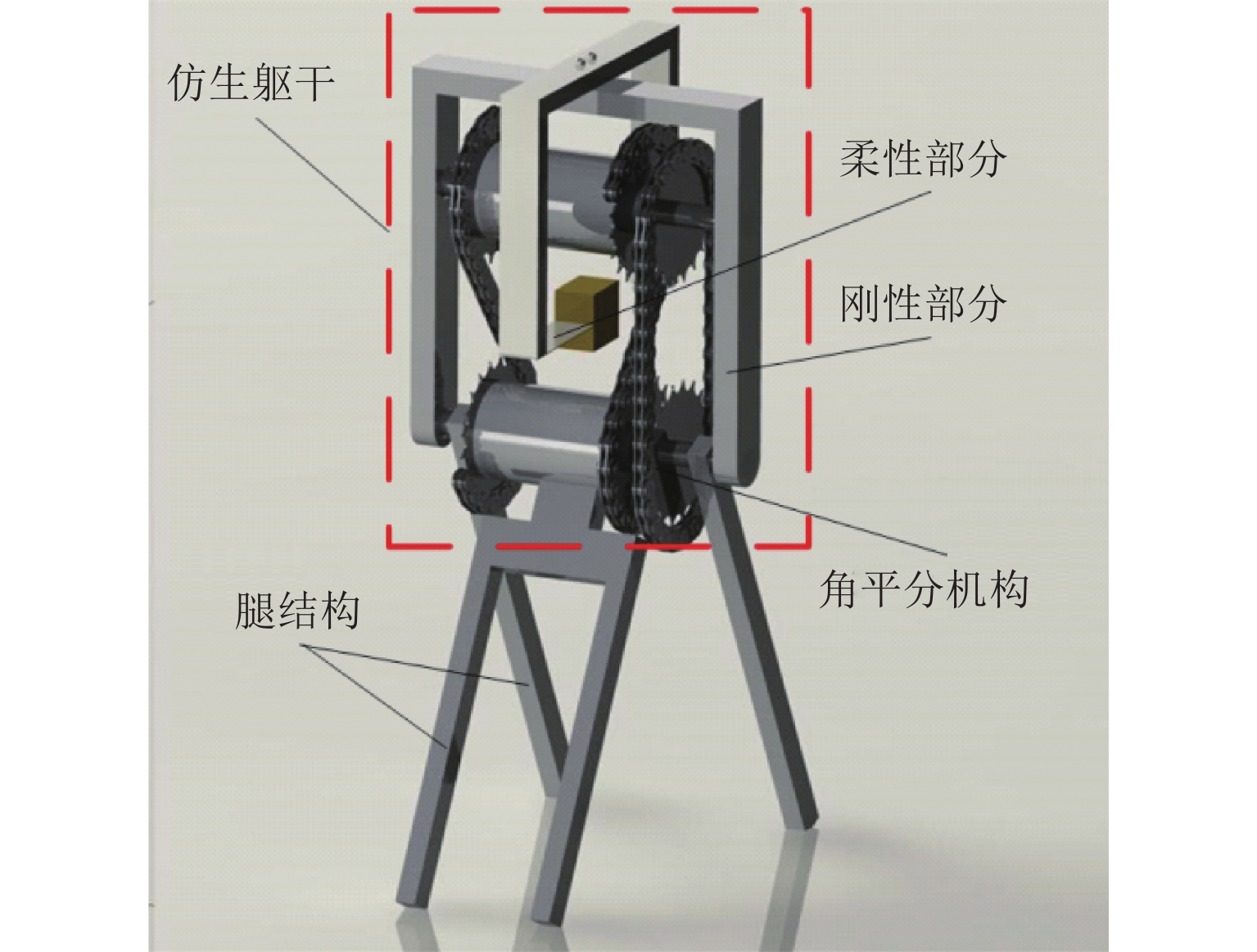
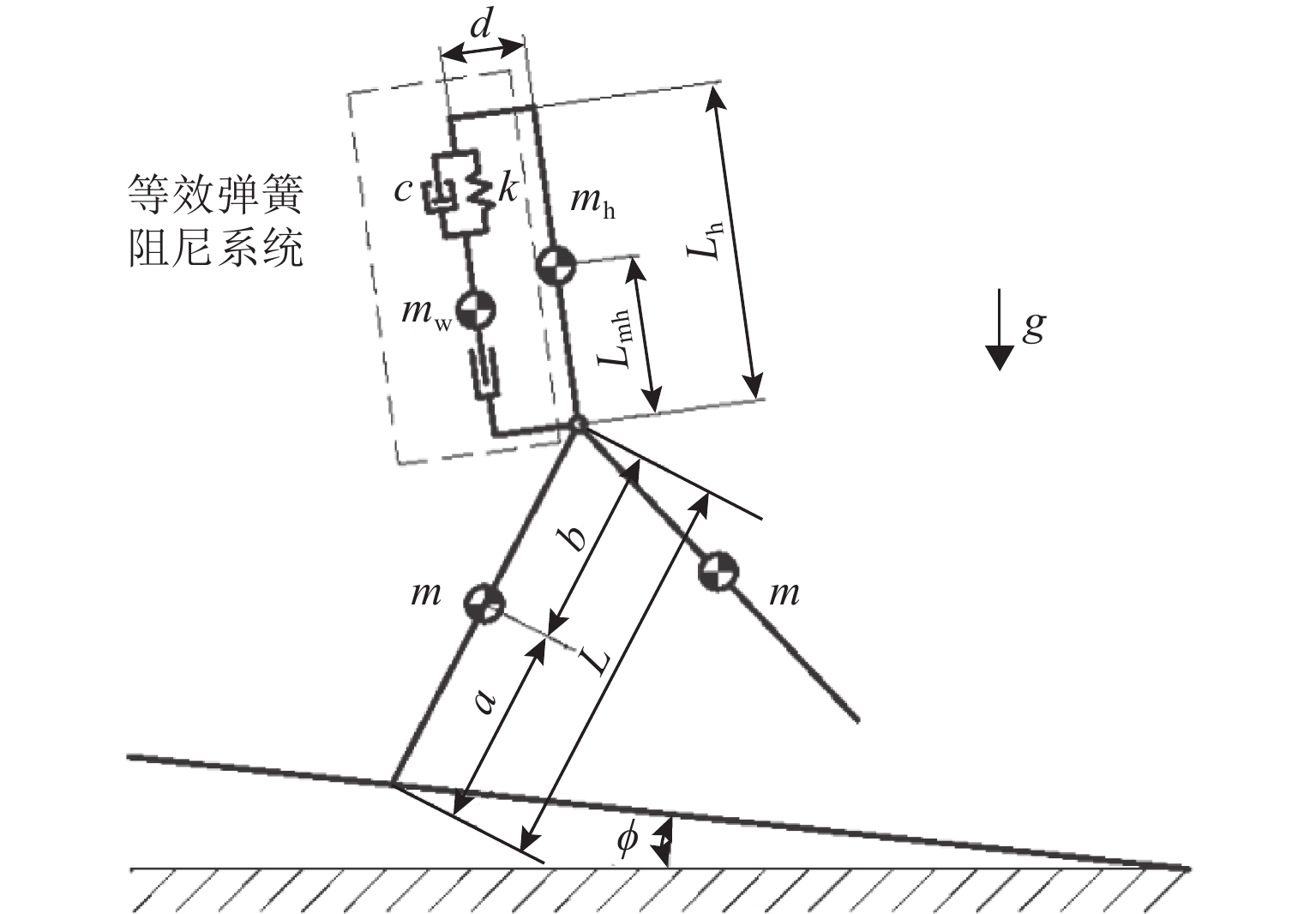
图 1 带有仿生躯干的被动行走机器人三维模型
Figure 1. 3D model of passive walking robot with a bionic torso
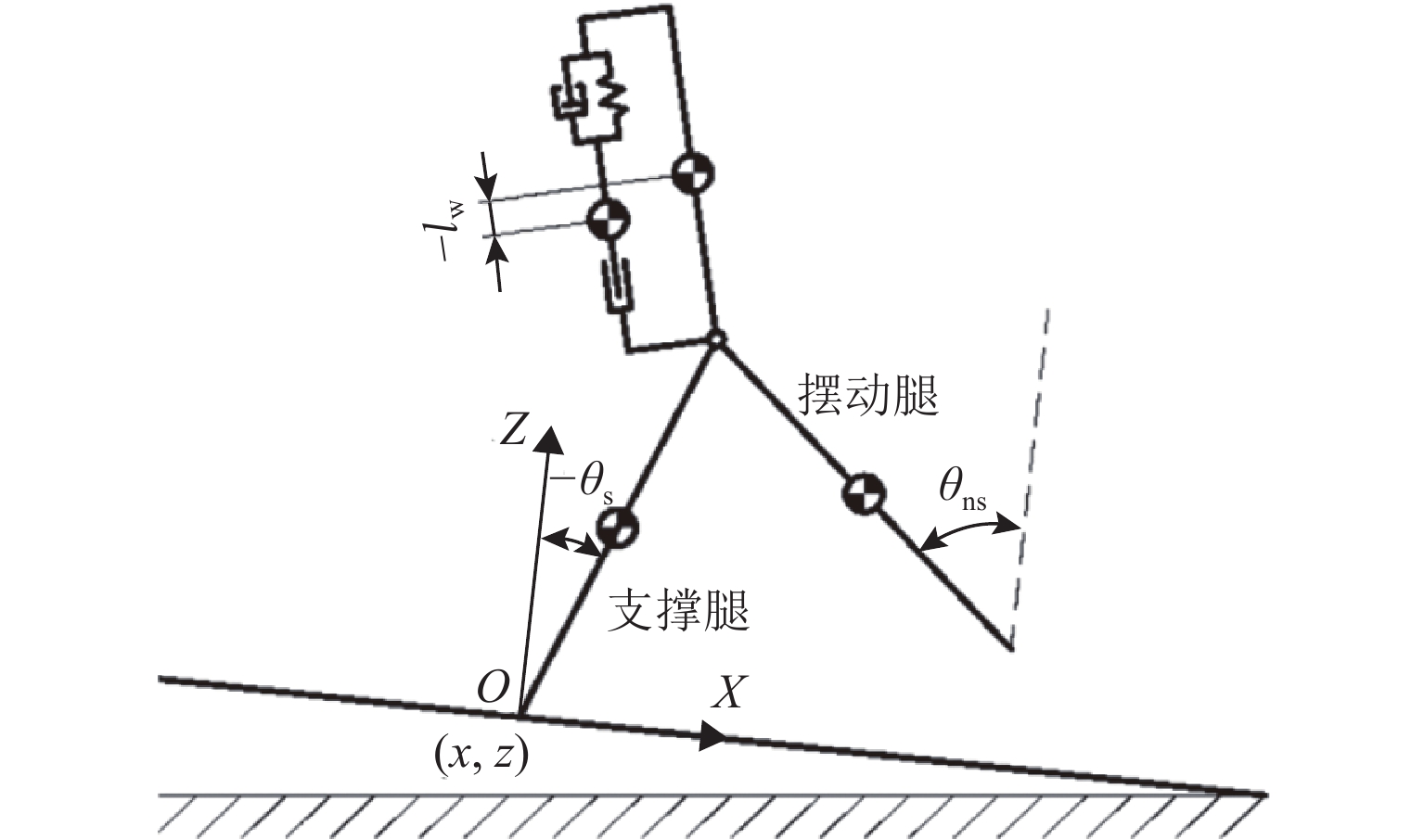
图 3 带有仿生躯干的被动行走机器人广义坐标
Figure 3. Generalized coordinates of passive walking robot with a bionic torso
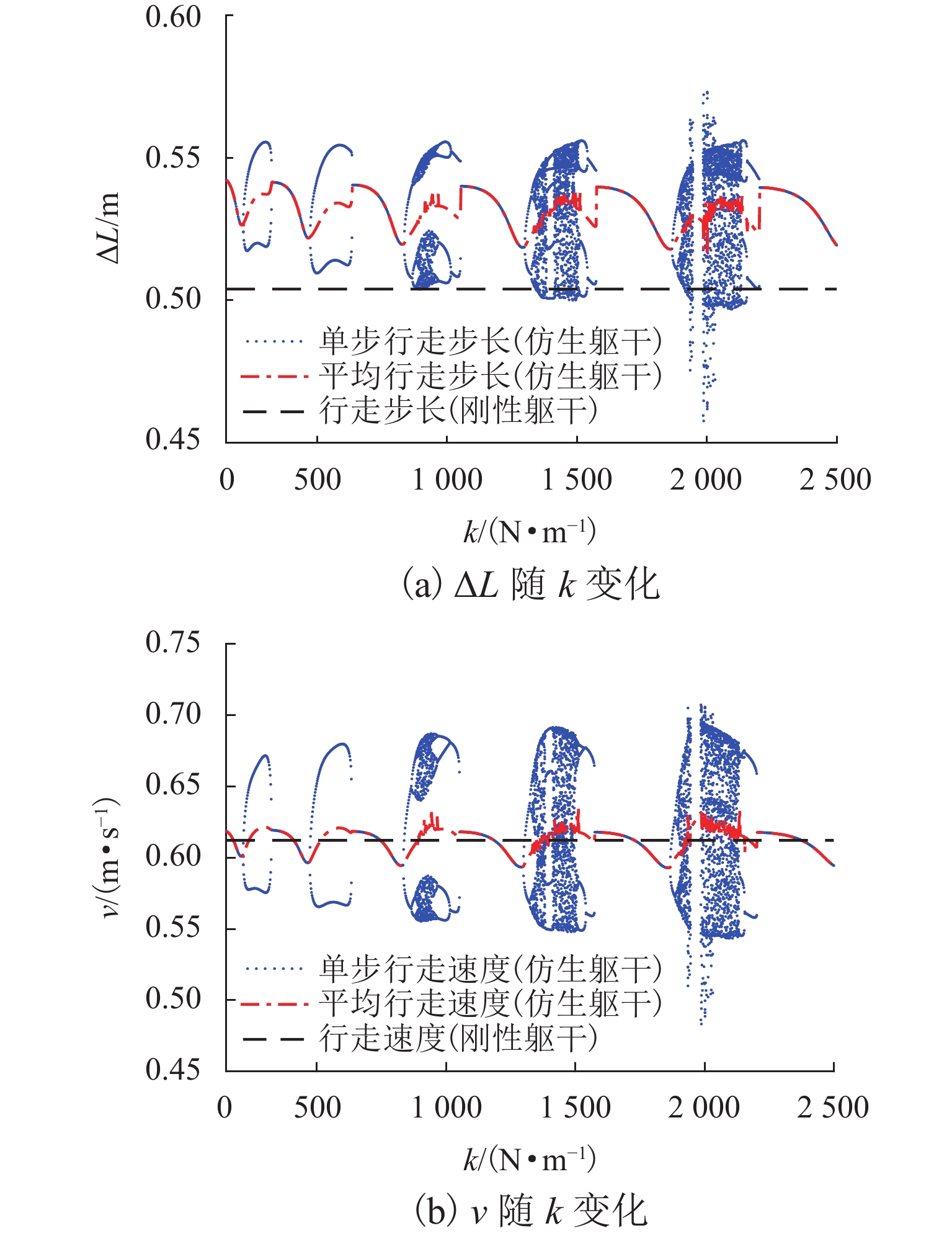
图 5 等效弹性系数k与机器人步态的关系
Figure 5. Relationship between equivalent elasticity coefficient k and robot gait
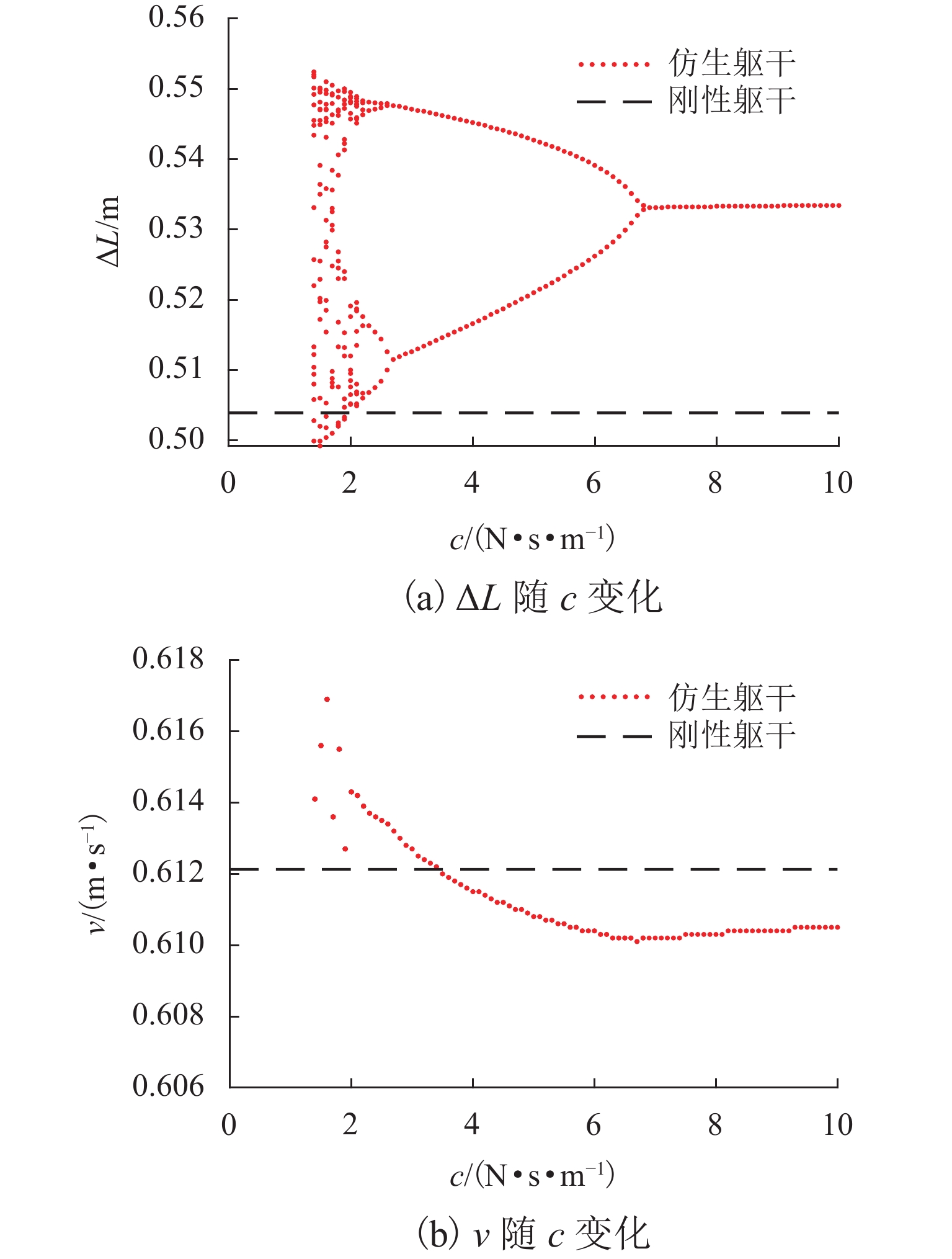
图 6 等效阻尼系数c与机器人步态的关系
Figure 6. Relationship between equivalent damping coefficient c and robot gait
表 1 刚性躯干机器人仿真参数及其取值
Table 1. Simulation parameters and values for rigid torso robot
参数 m
/kgmh
/kgLmh
/mLh
/ma,b
/mg/(m·s−2) ϕ/rad 取值 5.0 3.5 0.25 0.5 0.5 9.81 0.04  下载: 导出CSV
下载: 导出CSV
表 2 k=1 600 N/m与k=1800 N/m时平均步长与步行周期的变化
Table 2. Change of average step length and walking period when k=1 600 N/m and k=1800 N/m
k /(N·m−1) ΔL T 数值/m 增幅/% 数值/s 增幅/% 1600 0.5396 7 0.8735 6 1800 0.5252 4 0.8740 6
下载: 导出CSV
表 3 mh=2 kg的行走步长与步行速度(k=100 N/m, c=2 N·s/m, mw=1.0 kg)
Table 3. Walking step length and walking speed when mh=2 kg (k=100 N/m, c=2 N·s/m, mw=1.0 kg)
躯干类型 ΔL/m v/(m·s−1) 刚性躯干 0.4453 0.6135 仿生躯干 0.4984 0.6238 增幅/% 12 2
下载: 导出CSV
表 4 mh =3 kg的行走步长与步行速度 (k=100 N/m, c=2 N·s/m, mw =1.2 kg)
Table 4. Walking step length and walking speed when mh=3 kg (k=100 N/m, c=2 N·s/m, mw =1.2 kg)
躯干类型 ΔL/m v/(m·s−1) 刚性躯干 0.4871 0.6130 仿生躯干 0.5375 0.6225 增幅/% 10 2
下载: 导出CSV
表 5 mh =4 kg的行走步长与步行速度(k=380 N/m, c=2 N·s/m, mw=1.2 kg)
Table 5. Walking step length and walking speed when mh=4 kg (k=380 N/m, c=2 N·s/m, mw=1.2 kg)
躯干类型 ΔL/m v/(m·s−1) 刚性躯干 0.5189 0.6110 仿生躯干 0.5600 0.6185 增幅/% 8 1
下载: 导出CSV
-
[1] MCGEER T. Passive dynamic walking[J]. The International Journal of Robotics Research, 1990, 9(2): 62-82. doi: 10.1177/027836499000900206 [2] SCHONEBAUM J K, ALIJANI F, RADAELLI G. Review on mobile robots that exploit resonance[J]. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2021, 235(24): 7907-7924. doi: 10.1177/09544062211036923 [3] MIKOLAJCZYK T, MIKOŁAJEWSKA E, AL-SHUKA H F N, et al. Recent advances in bipedal walking robots: review of gait, drive, sensors and control systems[J]. Sensors, 2022, 22(12): 4440.1-4440.31. [4] FATHIZADEH M, MOHAMMADI H, TAGHVAEI S. A modified passive walking biped model with two feasible switching patterns of motion to resemble multi-pattern human walking[J]. Chaos, Solitons & Fractals, 2019, 127: 83-95. [5] ZNEGUI W, GRITLI H, BELGHITH S. A new Poincaré map for investigating the complex walking behavior of the compass-gait biped robot[J]. Applied Mathematical Modelling, 2021, 94: 534-557. doi: 10.1016/j.apm.2021.01.036 [6] WILLIAMS D S, MARTIN A E. Does a finite-time double support period increase walking stability for planar bipeds?[J]. Journal of Mechanisms and Robotics, 2021, 13(1): 011019.1-011019.10. [7] 柳宁,李俊峰,王天舒. 双足模型步行中的倍周期步态和混沌步态现象[J]. 物理学报,2009,58(6): 3772-3779. doi: 10.3321/j.issn:1000-3290.2009.06.027LIU Ning, LI Junfeng, WANG Tianshu. Period- doubling gait and chaotic gait of biped walking model[J]. Acta Physica Sinica, 2009, 58(6): 3772-3779. doi: 10.3321/j.issn:1000-3290.2009.06.027 [8] LI J F, TIAN Y T, HUANG X L, et al. Foot shape for passive dynamic kneed biped robot[C]//2010 IEEE International Conference on Robotics and Biomimetics. Tianjin: IEEE, 2011: 1281-1286. [9] CHYOU T, LIDDELL G F, PAULIN M G. An upper-body can improve the stability and efficiency of passive dynamic walking[J]. Journal of Theoretical Biology, 2011, 285(1): 126-135. doi: 10.1016/j.jtbi.2011.06.032 [10] WISSE M, SCHWAB A L, VAN DER HELM F C T. Passive dynamic walking model with upper body[J]. Robotica, 2004, 22(6): 681-688. doi: 10.1017/S0263574704000475 [11] WISSE M, HOBBELEN D G E, SCHWAB A L. Adding an upper body to passive dynamic walking robots by means of a bisecting hip mechanism[J]. IEEE Transactions on Robotics, 2007, 23(1): 112-123. doi: 10.1109/TRO.2006.886843 [12] DENG K, ZHAO M G, XU W L. Passive dynamic walking with a torso coupled via torsional springs[J]. International Journal of Humanoid Robotics, 2017, 14(1): 1650024.1-1650024.19. [13] 倪修华,陈维山,刘军考,等. 弹簧刚度对被动步行的稳定性影响[J]. 力学学报,2010,42(3): 541-547. doi: 10.6052/0459-1879-2010-3-2009-270NI Xiuhua, CHEN Weishan, LIU Junkao, et al. The effect of spring stiffness on the stability of passive dynamic walking[J]. Chinese Journal of Theoretical and Applied Mechanics, 2010, 42(3): 541-547. doi: 10.6052/0459-1879-2010-3-2009-270 [14] RIGONI I, BONCI T, BIFULCO P, et al. Characterisation of the transient mechanical response and the electromyographical activation of lower leg muscles in whole body vibration training[J]. Scientific Reports, 2022, 12: 6232.1-6232.10. [15] VIEN B S, CHIU W K, RUSS M, et al. Modal frequencies associations with musculoskeletal components of human legs for extracorporeal bone healing assessment based on a vibration analysis approach[J]. Sensors, 2022, 22(2): 670-688. doi: 10.3390/s22020670 [16] ACKERMAN J, SEIPEL J. Energy efficiency of legged robot locomotion with elastically suspended loads[J]. IEEE Transactions on Robotics, 2013, 29(2): 321-330. doi: 10.1109/TRO.2012.2235698 [17] ACKERMAN J, SEIPEL J. Energetics of bio-inspired legged robot locomotion with elastically-suspended loads[C]//2011 IEEE/RSJ International Conference on Intelligent Robots and Systems. San Francisco: IEEE, 2011: 203-208. [18] TANAKA D, ASANO F, TOKUDA I. Gait analysis and efficiency improvement of passive dynamic walking of combined rimless wheel with wobbling mass[C]//2012 IEEE/RSJ International Conference on Intelligent Robots and Systems. Vilamoura-Algarve: IEEE, 2012: 151-156. [19] KAWAMOTO J, ASANO F. Active viscoelastic-legged rimless wheel with upper body and its adaptability to irregular terrain[C]//2012 IEEE/RSJ International Conference on Intelligent Robots and Systems. Vilamoura-Algarve: IEEE, 2012: 157-162. [20] ASANO F, KAWAMOTO J. Passive dynamic walking of viscoelastic-legged rimless wheel[C]//2012 IEEE International Conference on Robotics and Automation. Saint Paul: IEEE, 2012: 2331-2336. [21] AKUTSU Y, ASANO F, TOKUDA I. Passive dynamic walking of compass-like biped robot with dynamic absorbers[C]//2014 IEEE/RSJ International Conference on Intelligent Robots and Systems. Chicago: IEEE, 2014: 4855-4860. [22] MURATA H, YAGI T, MIDORIKAWA T, et al. Comparison between DXA and MRI for the visceral fat assessment in athletes[J]. International Journal of Sports Medicine, 2022, 43(7): 625-631. doi: 10.1055/a-1717-1619 [23] DŪRĪTIS I, HUSSAR P, MUGURĒVIČS A. Gastrin and somatostatin enteroendocrine cells in the small intestines of ostrich (Struthio camelus var. domesticus) during pre-and post-hatching period[J]. Anatomia, Histologia, Embryologia, 2021, 50(3): 550-555. doi: 10.1111/ahe.12660 [24] HANAZAWA Y, HAYASHI T, YAMAKITA M, et al. High-speed limit cycle walking for biped robots using active up-and-down motion control of wobbling mass[C]//2013 IEEE/RSJ International Conference on Intelligent Robots and Systems. Tokyo: IEEE, 2014: 3649-3654. [25] 黄洪猛,张元海. 基于Reissner原理的波形钢腹板箱梁约束扭转分析[J]. 西南交通大学学报,2022,57(5): 1137-1145. doi: 10.3969/j.issn.0258-2724.20210613HUANG Hongmeng, ZHANG Yuanhai. Restrained torsion analysis of box girders with corrugated steel webs based on Reissner’s principle[J]. Journal of Southwest Jiaotong University, 2022, 57(5): 1137-1145. doi: 10.3969/j.issn.0258-2724.20210613 [26] 许晶,李世尧,王斌泰,等. 解析型Timoshenko梁有限单元[J]. 西南交通大学学报,2019,54(3): 492-498. doi: 10.3969/j.issn.0258-2724.20180176XU Jing, LI Shiyao, WANG Bintai, et al. Analytical finite element for Timoshenko beams[J]. Journal of Southwest Jiaotong University, 2019, 54(3): 492-498. doi: 10.3969/j.issn.0258-2724.20180176 [27] 铁摩辛柯 S, 杨 D H, 小韦孚. 工程中的振动问题[M]. 胡人礼, 译. 北京: 人民铁道出版社, 1978. -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 790
- HTML全文浏览量: 298
- PDF下载量: 64
- 被引次数: 0