

Vehicle Trajectory Reconstruction Model of Signalized Intersection in Connected Automated Environments
-
摘要:
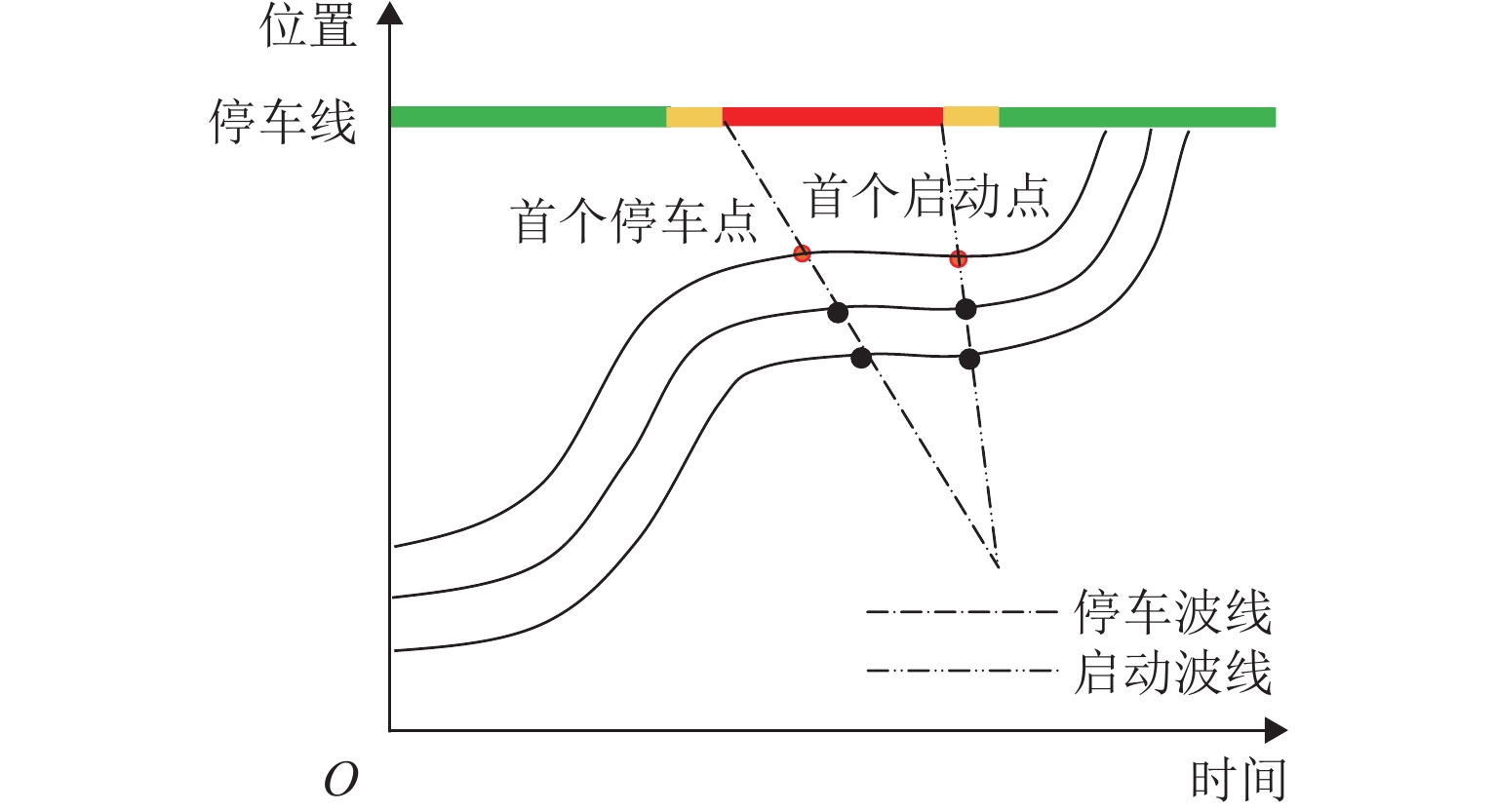
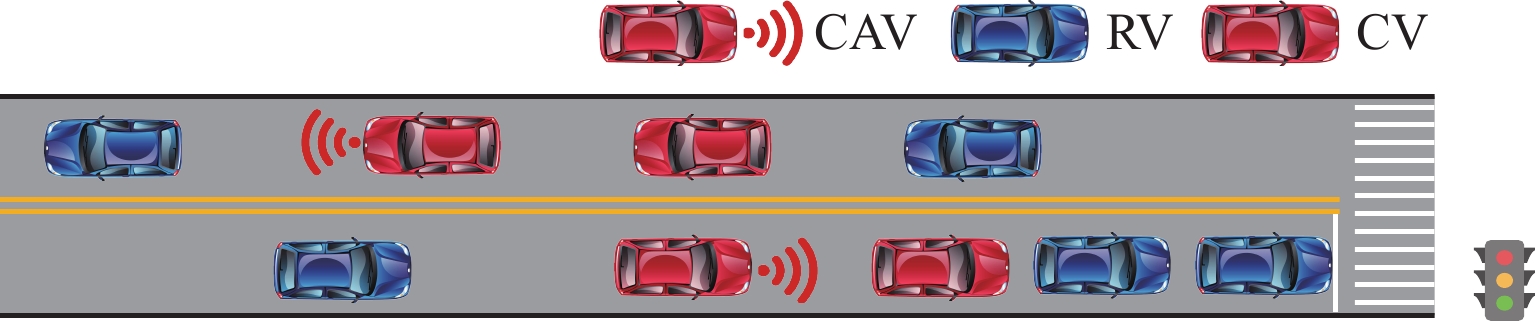
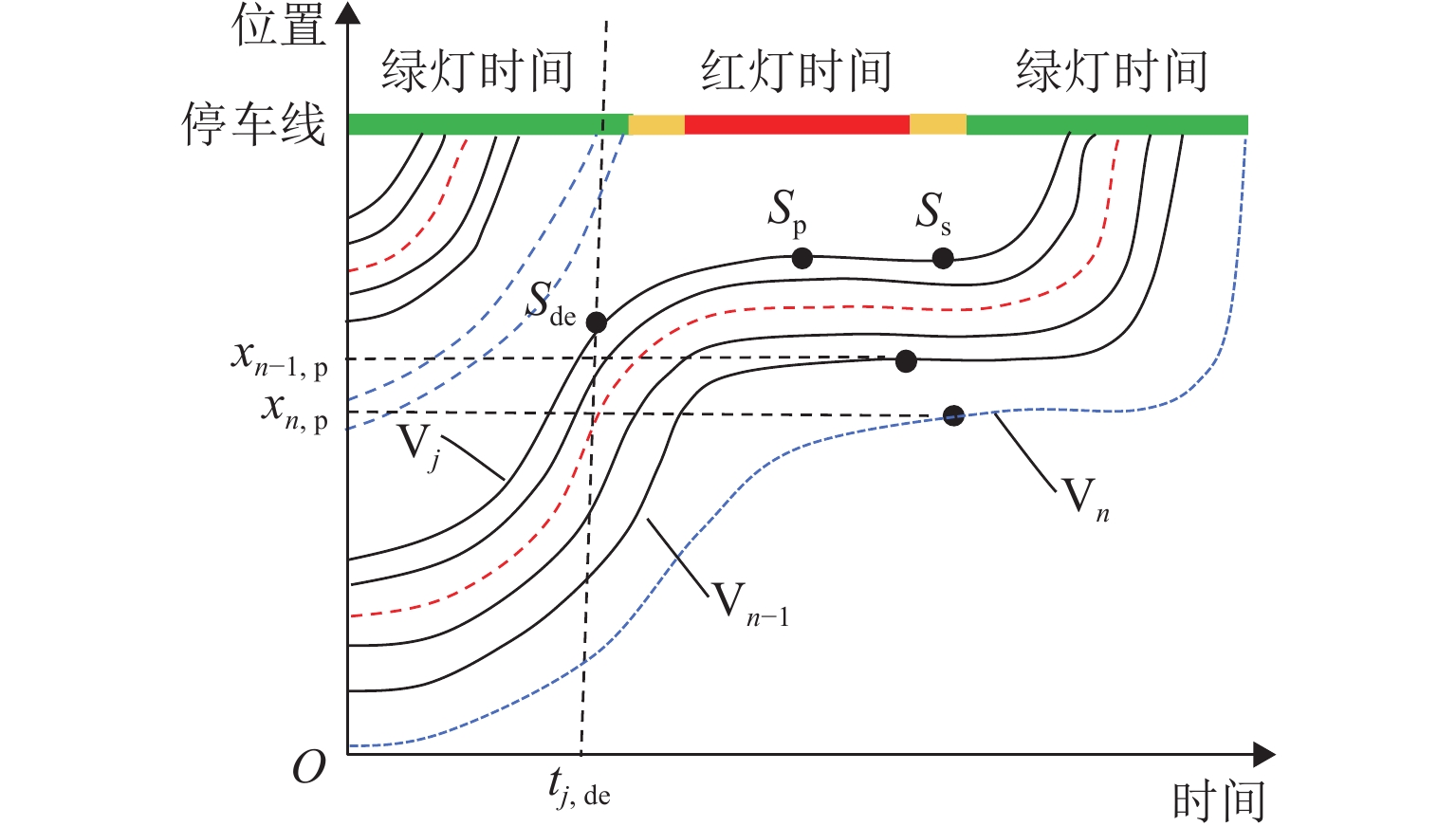
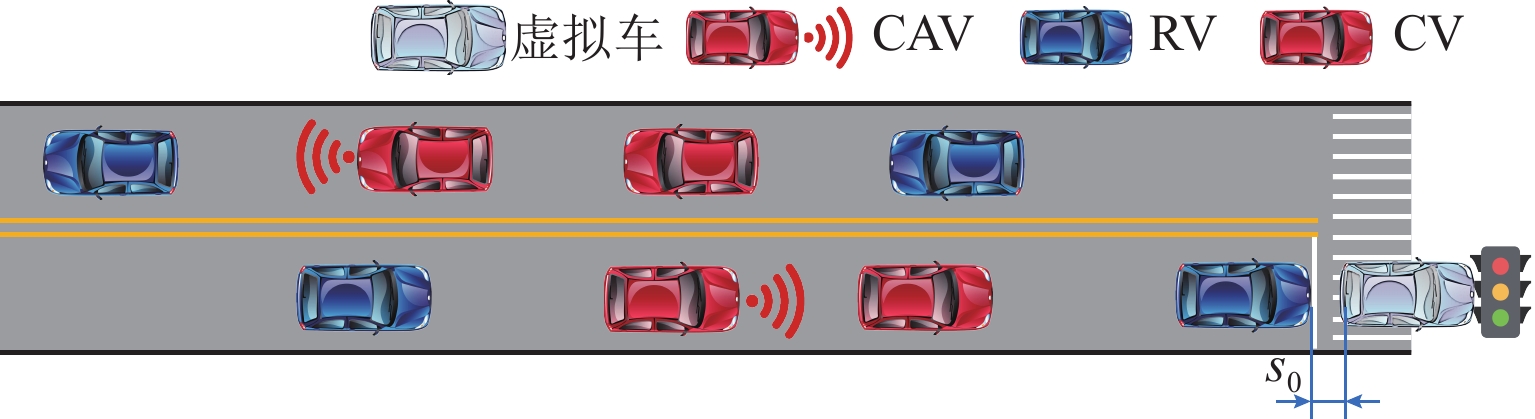
车辆轨迹数据提供了大量的时空交通流信息,可用于各类交通研究. 传统车辆轨迹模型多以人工驾驶环境为研究对象,普遍未考虑由常规车(RV)、网联人工驾驶车(CV)以及智能网联车(CAV)组成的混合交通流的影响. 为解决该问题,构建智能网联环境下信号交叉口全样本车辆轨迹重构模型. 首先,介绍并分析智能网联环境下城市道路交叉口处车辆组成及排队通过情况;然后,构建城市道路混合交通流轨迹数量估计模型,并针对前后车的排队情况提出虚拟车的概念,用于估计不同车辆的交通状态;最后,设计数值仿真实验分析交通流密度和网联车渗透率对模型的影响,并基于NGSIM数据进行实例验证. 结果表明:轨迹重构模型的数量误差和位置误差均随着交通流密度和网联车渗透率的增大而减小,如交通流密度由20 veh/km增大至50 veh/km的过程中,模型数量误差和位置误差均呈现下降趋势,且最大误差分别不超过6.88%和8.02 m;与网联人工驾驶车渗透率相比,智能网联车的渗透率对模型结果影响更大.
Abstract:Vehicle trajectory data provides abundant spatial-temporal traffic flow information, which can be used for traffic research. Traditional vehicle trajectory models mostly focus on the artificial driving environment and fail to consider the impact of mixed traffic flows composed of regular vehicles (RVs), connected vehicles (CVs), and connected automated vehicles (CAVs). To solve this problem, a full sample vehicle trajectory reconstruction model of signalized intersections in connected automated environments was proposed. Firstly, the composition of vehicles at signalized intersections of urban roads and the passage of queues in connected automated environments were analyzed. Secondly, a model for estimating the number of trajectories of mixed traffic flows on urban roads was constructed, and the concept of virtual vehicles was further proposed to estimate the traffic status of different vehicles according to the queuing of front and rear vehicles. Finally, a numerical simulation test was designed to analyze the influence of traffic flow density and penetration rate of CAVs and CVs on the model, and the model was verified by NGSIM data. The results show that the error of the number and position of the model decreases with the increase in traffic flow density and the penetration rate of CAVs and CVs. For example, when the traffic flow density increases from 20 veh/km to 50 veh/km, both the error of the number and position of the model shows a decreasing trend, and the maximum error is no more than 6.88% and 8.02 m. Compared with that of CVs, the penetration rate of CAVs has a greater impact on the model results.
-
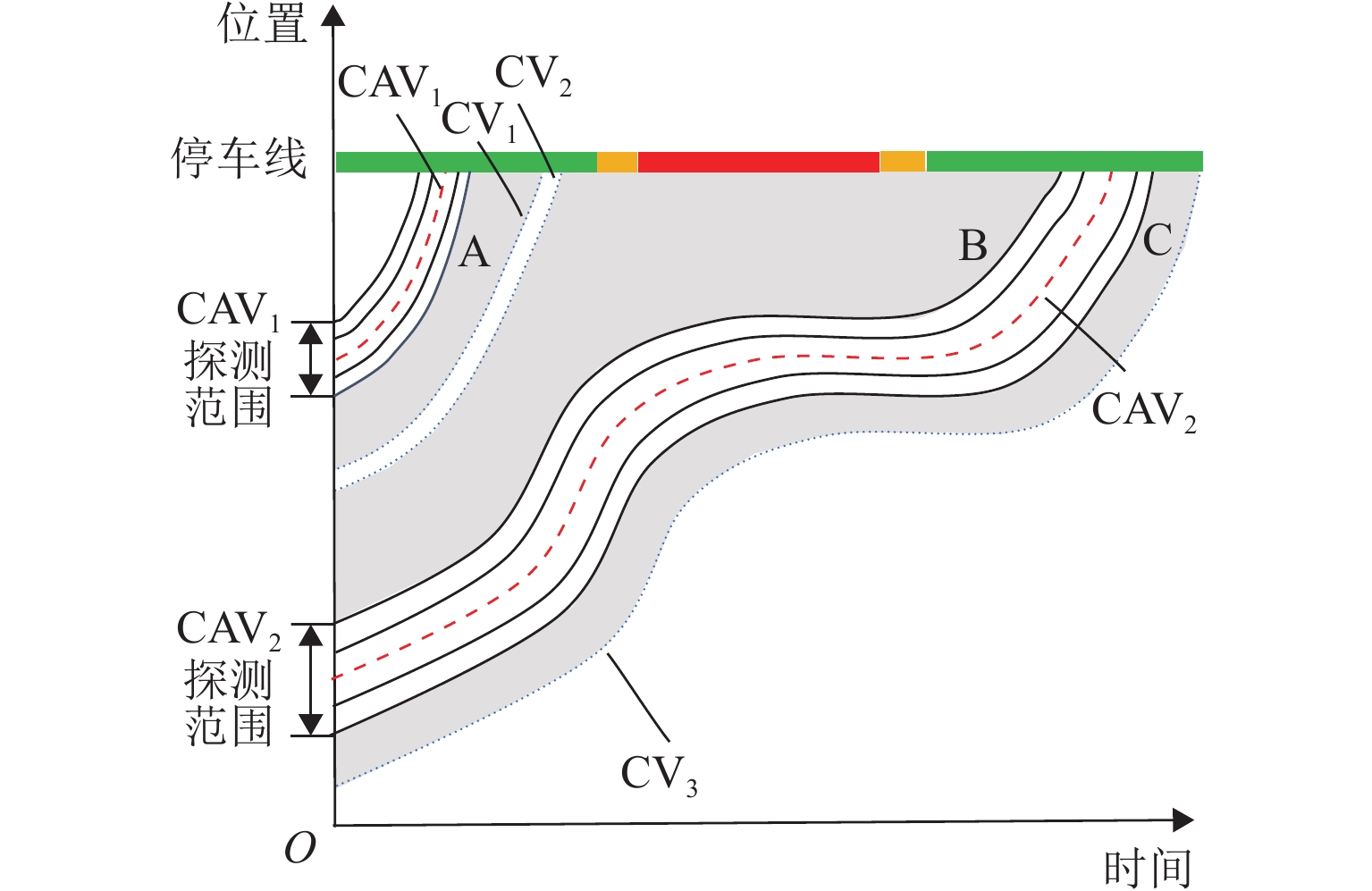
图 4 混合交通流下信号交叉口处时空轨迹
Figure 4. Spatial-temporal trajectories at signalized intersection under mixed traffic flow
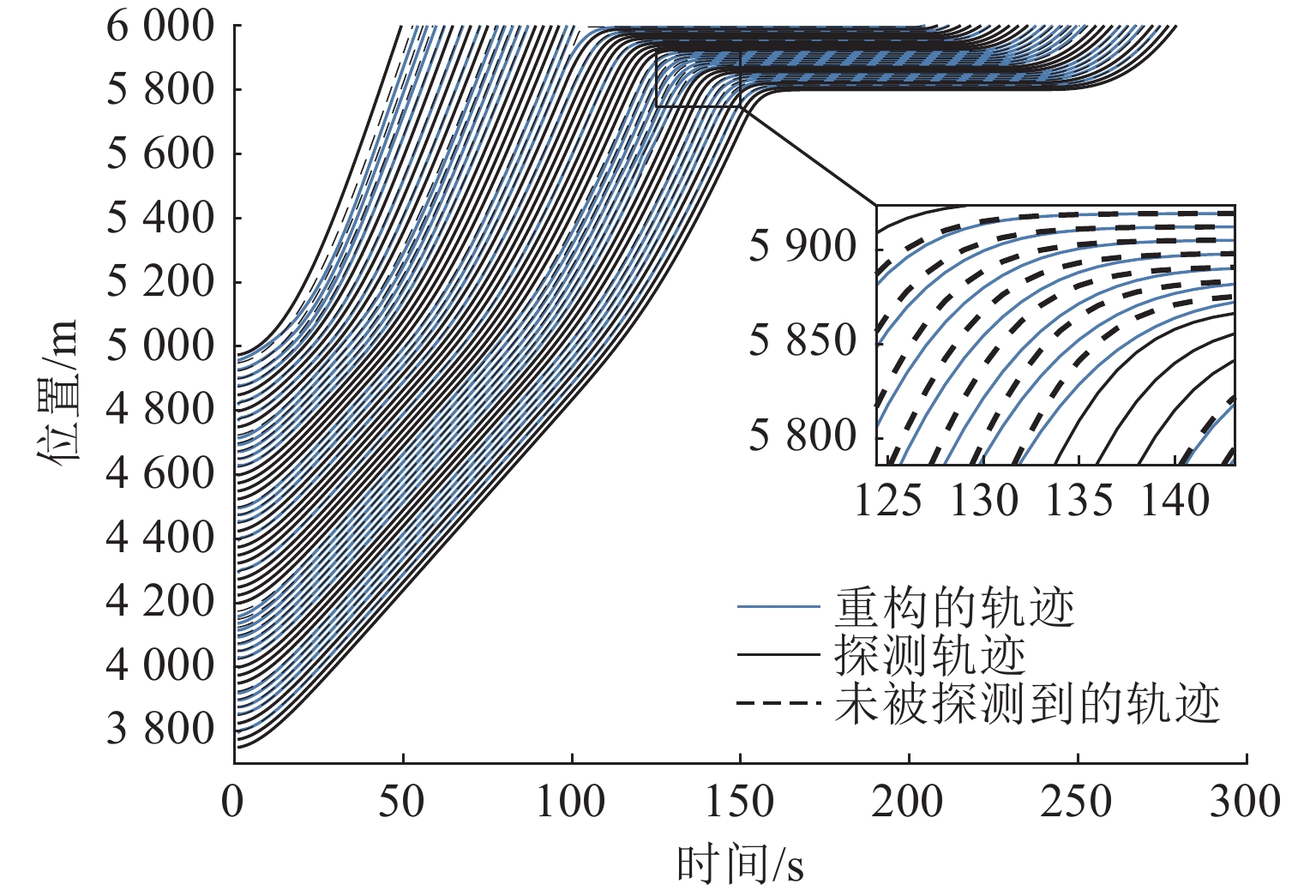
图 7 交通流密度为40 veh/km时重构轨迹
Figure 7. Trajectory reconstruction with a traffic flow density of 40 veh/km
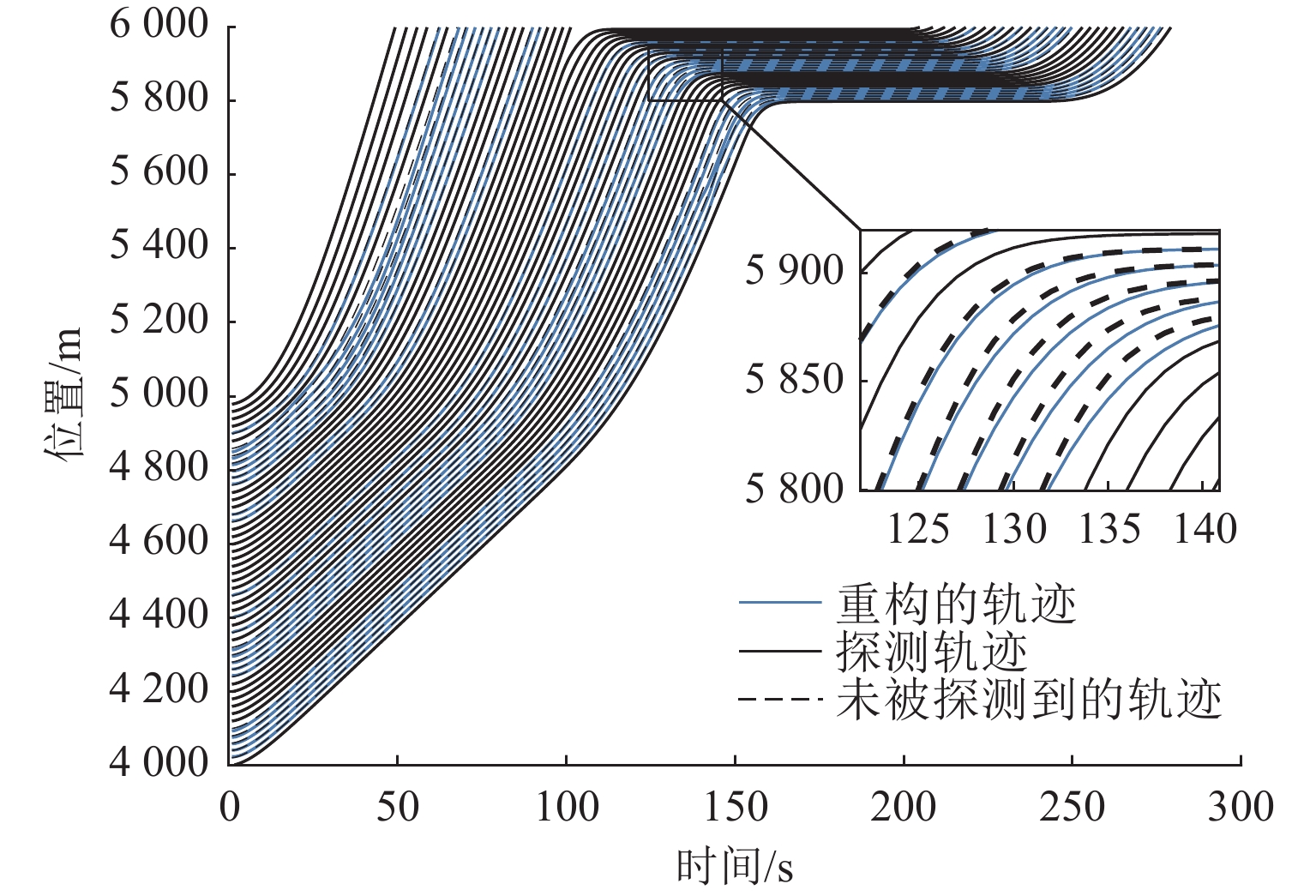
图 8 智能网联车渗透率为14%时重构轨迹
Figure 8. Trajectory reconstruction with a CAV penetration rate of 14%
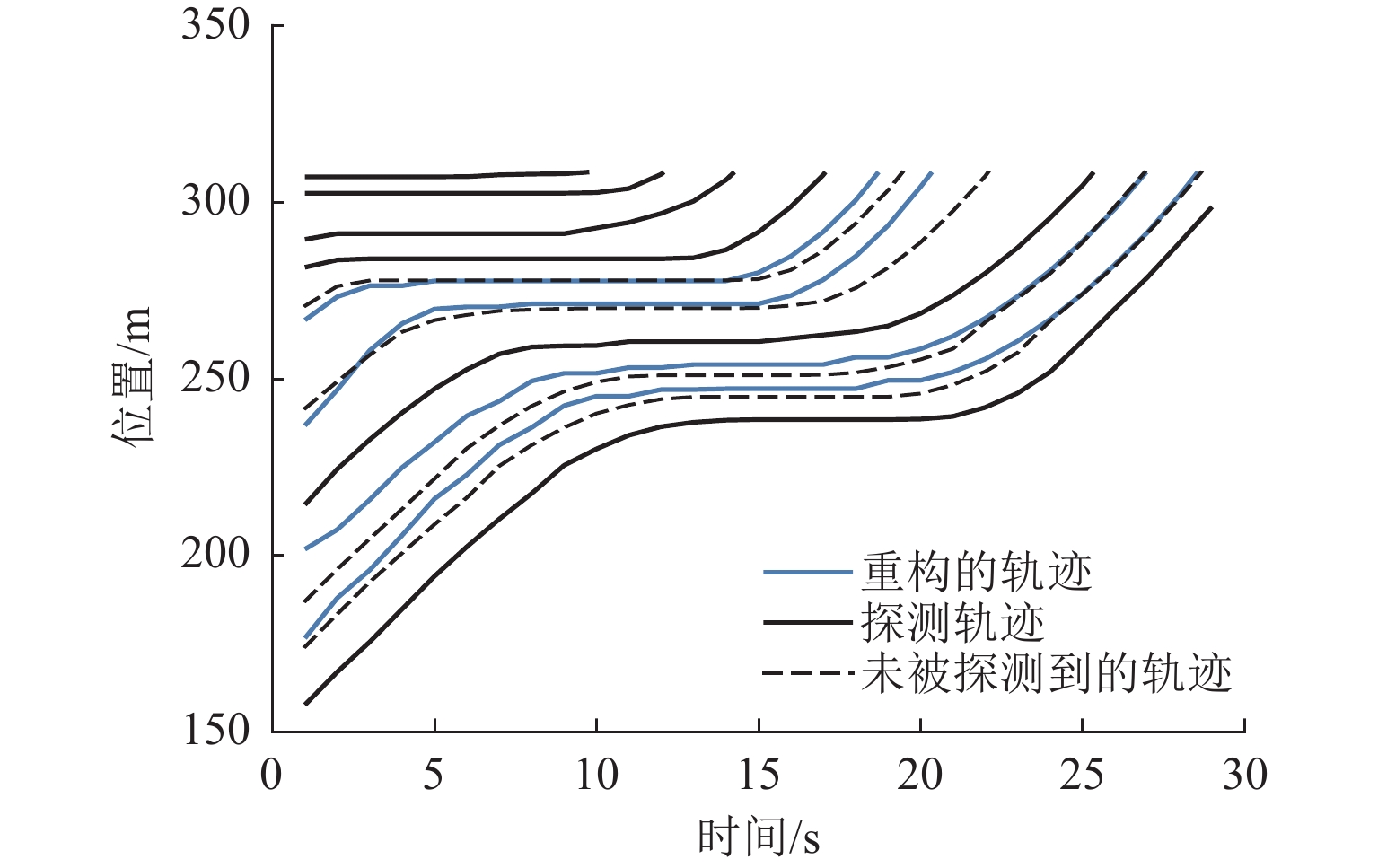
图 10 Lankershim Boulevard街道重构轨迹
Figure 10. Trajectory reconstruction of Lankershim Boulevard Street
表 1 车辆速度与视野和注视距离关系
Table 1. Relationship among vehicle speed, horizon, and gaze distance
车辆速度/(km·h−1) 视野/(°) 注视距离/m 0 170 80 40 100 180 60 86 355 80 60 377 100 40 564 120 22 710  下载: 导出CSV
下载: 导出CSV
表 2 IDM跟驰模型参数
Table 2. Parameters of IDM car-following model
模型 An/ (m·s−2) bn/ (m·s−2) vf/ (m·s−1) Tn/s s0/m IDM 1.00 2.00 33.30 1.50 2.00 虚拟 IDM 2.00 1.68 28.92 1.45 2.00
下载: 导出CSV
表 3 不同交通流密度条件下轨迹重构结果
Table 3. Trajectory reconstruction results under different traffic density conditions
交通流
密度/
(veh·km−1)插入 RV 的数量 插入 RV 的位置 实际车
辆/vehMAEm/
vehMAPEm/
%MAEx/
mRMSEx/
m20 29.05 2.00 6.88 4.15 8.02 30 29.09 1.85 6.36 3.18 7.45 40 29.00 1.82 6.27 2.93 7.06 50 23.50 1.33 5.67 2.88 6.61
下载: 导出CSV
表 4 不同CAV渗透率条件下轨迹重构结果
Table 4. Trajectory reconstruction results under different CAV penetration rates
CAV 渗透率/
%CAV 数量/
veh插入 RV 的数量 插入 RV 的位置 实际车辆/veh MAEm/
vehMAPEm/
%MAEx/
mRMSEx/
m2 1 34.04 2.41 7.07 3.46 8.37 4 2 29.85 2.04 6.83 3.01 7.63 6 3 28.03 2.00 7.14 3.31 8.01 8 4 23.50 1.33 5.67 2.88 6.61 10 5 22.05 1.18 5.37 2.80 6.51 12 6 18.93 0.67 3.54 2.21 5.04 14 7 16.48 0.58 3.52 2.19 4.85
下载: 导出CSV
表 5 不同CV渗透率条件下轨迹重构结果
Table 5. Trajectory reconstruction results under different CV penetration rates
CV 渗透率/% CV 辆数/veh 插入 RV 的数量 插入 RV 的位置 实际车辆/veh MAEm/
vehMAPEm/
%MAEx/
mRMSEx/
m8 4 27.33 2.25 8.23 3.74 8.72 12 6 26.61 1.74 6.54 3.55 8.23 16 8 24.86 1.57 6.32 3.07 6.96 20 10 23.50 1.33 5.67 2.88 6.61 24 12 23.30 1.23 5.26 2.71 6.43 28 14 21.41 0.91 4.26 2.49 6.06
下载: 导出CSV
表 6 Lankershim Boulevard街道轨迹重构误差
Table 6. Trajectory reconstruction errors of Lankershim Boulevard Street
插入 RV 的数量 插入 RV 的位置 本文方法 已有方法 实际车
辆/vehMAEm/
vehMAPEm/
%MAEx/
mRMSEx/
mMAEx/
mRMSEx/
m5.63 0.38 6.75 4.35 5.94 6.53 7.60
下载: 导出CSV
-
[1] SHI X W, LI X P. Constructing a fundamental diagram for traffic flow with automated vehicles: methodology and demonstration[J]. Transportation Research Part B: Methodological, 2021, 150: 279-292. doi: 10.1016/j.trb.2021.06.011 [2] 冉斌,谭华春,张健,等. 智能网联交通技术发展现状及趋势[J]. 汽车安全与节能学报,2018,9(2): 119-130. doi: 10.3969/j.issn.1674-8484.2018.02.001RAN Bin, TAN Huachun, ZHANG Jian, et al. Development status and trend of connected automated vehicle highway system[J]. Journal of Automotive Safety and Energy, 2018, 9(2): 119-130. doi: 10.3969/j.issn.1674-8484.2018.02.001 [3] HU X W, SUN J. Trajectory optimization of connected and autonomous vehicles at a multilane freeway merging area[J]. Transportation Research Part C: Emerging Technologies, 2019, 101: 111-125. doi: 10.1016/j.trc.2019.02.016 [4] LU G Y, NIE Y, LIU X B, et al. Trajectory-based traffic management inside an autonomous vehicle zone[J]. Transportation Research Part B: Methodological, 2019, 120: 76-98. doi: 10.1016/j.trb.2018.12.012 [5] 张惠玲,刘晓晓,许裕东. 基于车辆轨迹重构的信号交叉口延误提取研究[J]. 交通运输系统工程与信息,2020,20(2): 237-243. doi: 10.16097/j.cnki.1009-6744.2020.02.035ZHANG Huiling, LIU Xiaoxiao, XU Yudong. Delay extraction based on vehicle’s trajectory reconstruction at signalized intersection[J]. Journal of Transportation Systems Engineering and Information Technology, 2020, 20(2): 237-243. doi: 10.16097/j.cnki.1009-6744.2020.02.035 [6] PUNZO V, BORZACCHIELLO M T, CIUFFO B. On the assessment of vehicle trajectory data accuracy and application to the next generation simulation (NGSIM) program data[J]. Transportation Research Part C: Emerging Technologies, 2011, 19(6): 1243-1262. doi: 10.1016/j.trc.2010.12.007 [7] COIFMAN B. Estimating travel times and vehicle trajectories on freeways using dual loop detectors[J]. Transportation Research Part A: Policy and Practice, 2002, 36(4): 351-364. doi: 10.1016/S0965-8564(01)00007-6 [8] MU J T, HAN Y, ZHANG C, et al. An unscented Kalman filter-based method for reconstructing vehicle trajectories at signalized intersections[J]. Journal of Advanced Transportation, 2021, 2021: 1-12. [9] WANG Y P, WEI L, CHEN P. Trajectory reconstruction for freeway traffic mixed with human-driven vehicles and connected and automated vehicles[J]. Transportation Research Part C: Emerging Technologies, 2020, 111: 135-155. doi: 10.1016/j.trc.2019.12.002 [10] HAN X, MA R, ZHANG H M. Energy-aware trajectory optimization of CAV platoons through a signalized intersection[J/OL]. Transportation Research Part C: Emerging Technologies, 2020, 118: 102652.1- 102652.16. [11] 蒋阳升,刘梦,王思琛,等. 基于跟驰特性的智能网联车混合交通流轨迹重构[J]. 西南交通大学学报,2021,56(6): 1135-1142,1132.JIANG Yangsheng, LIU Meng, WANG Sichen, et al. Trajectory reconstruction for traffic flow mixed with connected automated vehicles based on car-following characteristics[J]. Journal of Southwest Jiaotong University, 2021, 56(6): 1135-1142,1132. [12] OSAMA O A, BAKHIT P R, ISHAK S. Analysis of queue estimation process at signalized intersections under low connected vehicle penetration rates[J]. Canadian Journal of Civil Engineering, 2021, 48(10): 1398-1408. doi: 10.1139/cjce-2020-0366 [13] 张驰,杨少伟,潘兵宏,等. 交通仿真中驾驶人空间视野感知模型[J]. 交通运输工程学报,2010,10(4): 115-120. doi: 10.3969/j.issn.1671-1637.2010.04.019ZHANG Chi, YANG Shaowei, PAN Binghong, et al. Perception model of driver spatial vision in traffic simulation[J]. Journal of Traffic and Transportation Engineering, 2010, 10(4): 115-120. doi: 10.3969/j.issn.1671-1637.2010.04.019 [14] 潘兵宏,赵一飞,梁孝忠. 动视觉原理在公路线形设计中的应用[J]. 长安大学学报(自然科学版),2004,24(6): 20-24. doi: 10.19721/j.cnki.1671-8879.2004.06.005PAN Binghong, ZHAO Yifei, LIANG Xiaozhong. Application of dynamic vision theory in highway alignment design[J]. Journal of Chang’an University (Natural Science Edition), 2004, 24(6): 20-24. doi: 10.19721/j.cnki.1671-8879.2004.06.005 -

 下载:
下载:

 点击查看大图
点击查看大图

计量
- 文章访问数: 868
- HTML全文浏览量: 637
- PDF下载量: 100
- 被引次数: 0