

Recognition Algorithm of Safe Obstacle Avoidance Domain for UAVs Based on Maximization Idea
-
摘要:
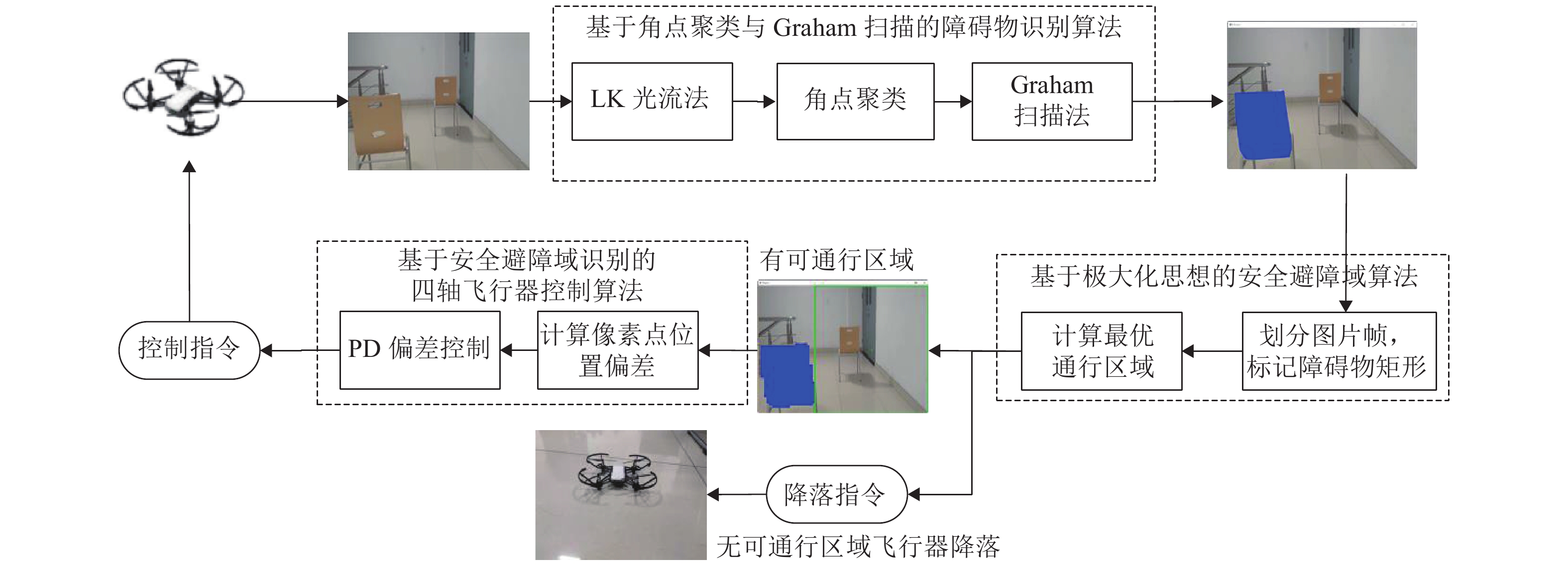
为提高四轴飞行器避障的准确性与实时性,提出一种结合LK (Lucas-Kanade)光流法和极大化思想的四轴飞行器避障算法. 首先,对四轴飞行器采集的视频流进行预处理,得到图像帧;其次,通过LK光流法剔除图像帧中光流小于阈值的角点,采用基于角点距离的聚类算法对角点进行分组,并计算出每组角点的外包轮廓;然后,利用基于极大化思想的安全避障域算法计算最优通行区域,进一步根据避障域求得偏差数据;最后,将偏差数据输入比例微分(PD)控制器得到控制信息,并发送控制指令使四轴飞行器及时调整飞行姿态,完成避障飞行. 通过特洛(Tello)四轴飞行器进行不同场景的实验表明,本文所提出的算法计算每帧图像最优安全避障域平均所需时间为0.17 s,既满足无人机避障实时性要求,又解决了识别障碍物区域与计算安全避障域问题.
Abstract:In order to improve the accuracy and real-time performance of obstacle avoidance for quad-rotor helicopters, an obstacle avoidance algorithm combining the Lucas-Kanade (LK) optical flow method and maximization idea was proposed. Firstly, the video stream collected by the quad-rotor helicopter was preprocessed to obtain the image frame. Secondly, corner points whose optical flow was less than the threshold value in the image frame were eliminated by the LK optical flow method, and corner points were grouped by a clustering algorithm based on corner point distance. In addition, the outsourcing contour of each group of corner points was calculated. Then, the safe obstacle avoidance domain algorithm based on the maximization idea was used to calculate the optimal passing domain, and the deviation data were obtained according to the obstacle avoidance domain. Finally, the deviation data were input to the proportional and differential (PD) controller to obtain the control information, and the control command was sent to make the quad-rotor helicopter adjust the flight attitude in time to complete the obstacle avoidance flight. Experiments on the Tello quad-rotor helicopter in different scenes show that the proposed algorithm takes an average of 0.17 seconds to calculate the optimal safe obstacle avoidance domain for each frame of the image, which meets the real-time requirements of unmanned aerial vehicle (UAV) obstacle avoidance and solves the problem of identifying obstacle domains and calculating safe obstacle avoidance domain.
-
Key words:
- maximization idea /
- safe obstacle avoidance domain /
- quad-rotor helicopter
-
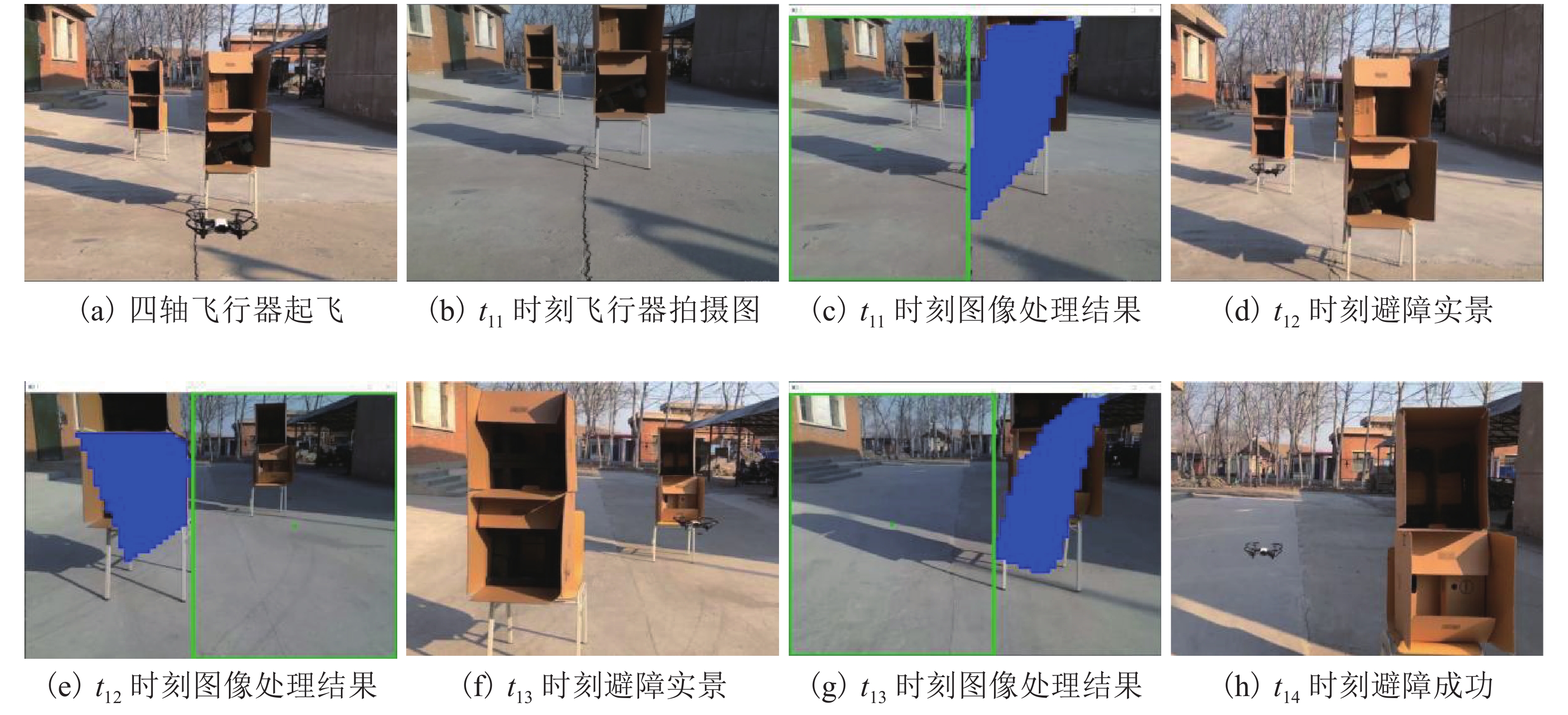
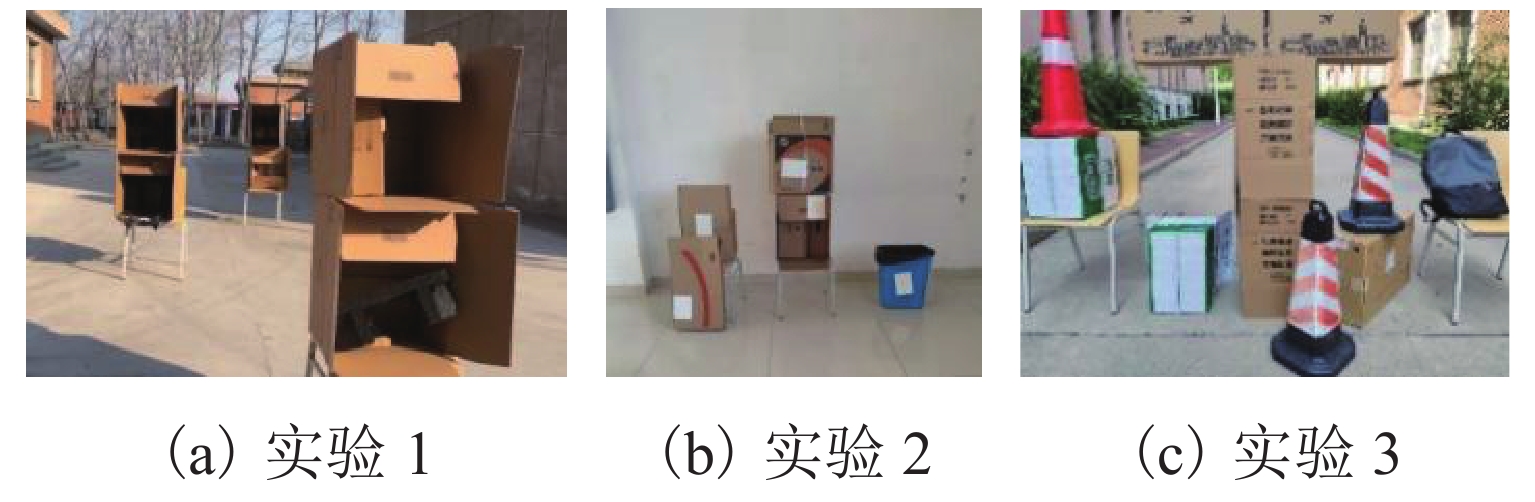
图 11 躲避多组障碍物实验(实验1)
Figure 11. Experiment of avoiding multiple groups of obstacles (experiment 1)

图 13 复杂障碍物避障实验(实验2)
Figure 13. Experiment of avoiding complex obstacles (experiment 2)
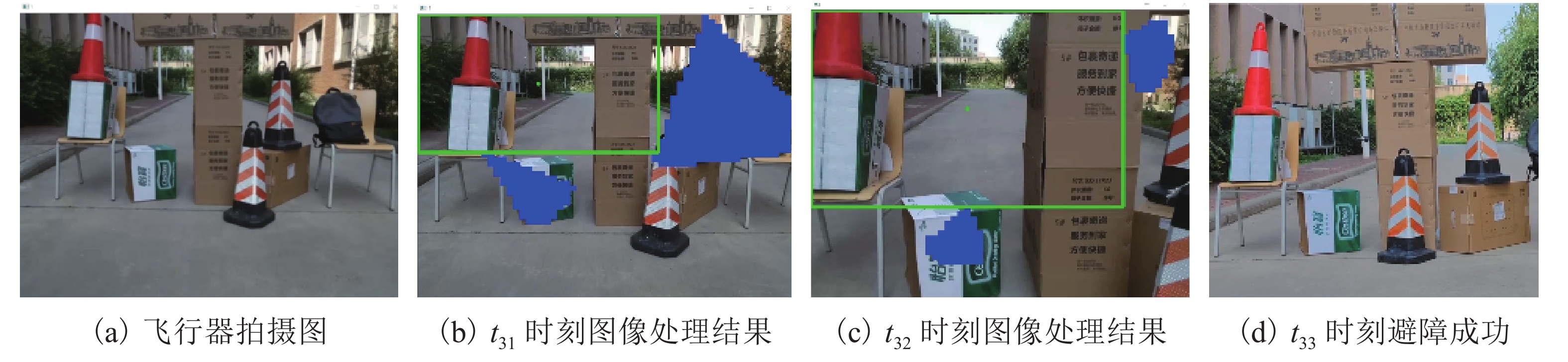
图 14 复杂障碍物避障实验(实验3)
Figure 14. Experiment of avoiding complex obstacles (experiment 3)
-
[1] 林立雄,何洪钦,何炳蔚,等. 基于改进人工势场模型的无人机局部避障方法[J]. 华中科技大学学报(自然科学版),2021,49(8): 86-91. doi: 10.13245/j.hust.210816LIN Lixiong, HE Hongqin, HE Bingwei, et al. Local obstacle avoidance method for unmanned aerial vehicle based on improved artificial potential field[J]. Journal of Huazhong University of Science and Technology (Natural Science Edition), 2021, 49(8): 86-91. doi: 10.13245/j.hust.210816 [2] 王梓豪,朱波,王奇,等. 基于视觉辅助导航的小旋翼机群编队穿越障碍技术[J]. 电子科技大学学报,2021,50(3): 391-397. doi: 10.12178/1001-0548.2021025WANG Zihao, ZHU Bo, WANG Qi, et al. Heterogeneous micro air vehicles formation crossing obstacles based on vision-aided navigation[J]. Journal of University of Electronic Science and Technology of China, 2021, 50(3): 391-397. doi: 10.12178/1001-0548.2021025 [3] WANG F, CUI J Q, CHEN B M, et al. A comprehensive UAV indoor navigation system based on vision optical flow and laser Fast SLAM[J]. Acta Automatica Sinica, 2013, 39(11): 1889-1899. [4] 张小东,郝向阳,孙国鹏,等. 旋翼无人机单目视觉障碍物径向光流检测法[J]. 测绘学报,2017,46(9): 1107-1115. doi: 10.11947/j.AGCS.2017.20160510ZHANG Xiaodong, HAO Xiangyang, SUN Guopeng, et al. Monocular vision obstacle detection method based on radial optical flow for rotor UAV[J]. Acta Geodaetica et Cartographica Sinica, 2017, 46(9): 1107-1115. doi: 10.11947/j.AGCS.2017.20160510 [5] FU Q, WANG J, GONG L, et al. Obstacle avoidance of flapping-wing air vehicles based on optical flow and fuzzy control[J]. Transactions of Nanjing University of Aeronautics and Astronautics, 2021, 38(2): 206-215. [6] HUANG L, WU G P, LIU J Y, et al. Obstacle distance measurement based on binocular vision for high-voltage transmission lines using a cable inspection robot[J]. Science Progress, 2020, 103(3): 36850420936910.1-36850420936910.35. [7] LIN H Y, PENG X Z. Autonomous quadrotor navigation with vision based obstacle avoidance and path planning[J]. IEEE Access, 2021, 9: 102450-102459. doi: 10.1109/ACCESS.2021.3097945 [8] DAI X, MAO Y X, HUANG T P, et al. Automatic obstacle avoidance of quadrotor UAV via CNN-based learning[J]. Neurocomputing, 2020, 402: 346-358. doi: 10.1016/j.neucom.2020.04.020 [9] 张午阳,章伟,宋芳,等. 基于深度学习的四旋翼无人机单目视觉避障方法[J]. 计算机应用,2019,39(4): 1001-1005. doi: 10.11772/j.issn.1001-9081.2018091952ZHANG Wuyang, ZHANG Wei, SONG Fang, et al. Monocular vision obstacle avoidance method for quadcopter based on deep learning[J]. Journal of Computer Applications, 2019, 39(4): 1001-1005. doi: 10.11772/j.issn.1001-9081.2018091952 [10] FU Q, YANG Y H, CHEN X Y, et al. Vision-based obstacle avoidance for flapping-wing aerial vehicles[J]. Science China Information Sciences, 2020, 63(7): 170208.1-170208.3. [11] 关震宇,杨东晓,李杰,等. 基于Dubins路径的无人机避障规划算法[J]. 北京理工大学学报,2014,34(6): 570-575. doi: 10.15918/j.tbit1001-0645.2014.06.008GUAN Zhenyu, YANG Dongxiao, LI Jie, et al. Obstacle avoidance planning algorithm for UAV based on Dubins path[J]. Transactions of Beijing Institute of Technology, 2014, 34(6): 570-575. doi: 10.15918/j.tbit1001-0645.2014.06.008 [12] 李樾,韩维,陈清阳,等. 基于改进的速度障碍法的有人/无人机协同系统三维实时避障方法[J]. 西北工业大学学报,2020,38(2): 309-318. doi: 10.3969/j.issn.1000-2758.2020.02.011LI Yue, HAN Wei, CHEN Qingyang, et al. Real-time obstacle avoidance for manned/unmanned aircraft cooperative system based on improved velocity obstacle method[J]. Journal of Northwestern Polytechnical University, 2020, 38(2): 309-318. doi: 10.3969/j.issn.1000-2758.2020.02.011 [13] 郭行,符文星,付斌,等. 复杂动态环境下无人飞行器动态避障近似最优轨迹规划[J]. 宇航学报,2019,40(2): 182-190. doi: 10.3873/j.issn.1000-1328.2019.02.007GUO Hang, FU Wenxing, FU Bin, et al. Near optimal dynamic obstacle avoidance trajectory programming for unmanned aerial vehicles[J]. Journal of Astronautics, 2019, 40(2): 182-190. doi: 10.3873/j.issn.1000-1328.2019.02.007 [14] HUANG X, DONG X Y, MA J, et al. The improved A* obstacle avoidance algorithm for the plant protection UAV with millimeter wave radar and monocular camera data fusion[J]. Remote Sensing, 2021, 13(17): 3364.1-3364.22. [15] LEE H Y, HO H W, ZHOU Y. Deep learning-based monocular obstacle avoidance for unmanned aerial vehicle navigation in tree plantations[J]. Journal of Intelligent & Robotic Systems, 2020, 101(1): 1-18. [16] OU J J, GUO X, ZHU M, et al. Autonomous quadrotor obstacle avoidance based on dueling double deep recurrent Q-learning with monocular vision[J]. Neurocomputing, 2021, 441: 300-310. doi: 10.1016/j.neucom.2021.02.017 [17] 张香竹,张立家,宋逸凡,等. 基于深度学习的无人机单目视觉避障算法[J]. 华南理工大学学报(自然科学版),2022,50(1): 101-108,131.ZHANG Xiangzhu, ZHANG Lijia, SONG Yifan, et al. Obstacle avoidance algorithm for unmanned aerial vehicle vision based on deep learning[J]. Journal of South China University of Technology (Natural Science Edition), 2022, 50(1): 101-108,131. [18] WANG D S, LI W, LIU X G, et al. UAV environmental perception and autonomous obstacle avoidance: a deep learning and depth camera combined solution[J]. Computers and Electronics in Agriculture, 2020, 175: 105523.1-105523.11. [19] 王知昆. 浅谈用极大化思想解决最大子矩阵问题[EB/OL]. (2003−041−20)[2022−01−10]. https://wenku.baidu.com/view/728cd5126edb6f1aff001fbb.html?_wkts_=1695568462819&bdQuery=%E6%B5%85%E8%B0%88%E7%94%A8%E6%9E%81%E5%A4%A7%E5%8C%96%E6%80%9D%E6%83%B3%E8%A7%A3%E5%86%B3%E6%9C%80%E5%A4%A7%E5%AD%90%E7%9F%A9 [20] 胡寿松. 自动控制原理[M]. 7版. 北京: 科学出版社, 2019. [21] 王家亮,李树华,张海涛. 基于贝叶斯估计与区域划分遍历的四轴飞行器避障路径规划算法[J]. 计算机应用,2021,41(2): 384-389. doi: 10.11772/j.issn.1001-9081.2020060962WANG Jialiang, LI Shuhua, ZHANG Haitao. Obstacle avoidance path planning algorithm of quad-rotor helicopter based on Bayesian estimation and region division traversal[J]. Journal of Computer Applications, 2021, 41(2): 384-389. doi: 10.11772/j.issn.1001-9081.2020060962 -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 790
- HTML全文浏览量: 187
- PDF下载量: 81
- 被引次数: 0