

Fault Diagnosis of Axle-Box Bearing Based on Weighted Combined Improved Envelope Spectrum
-
摘要:
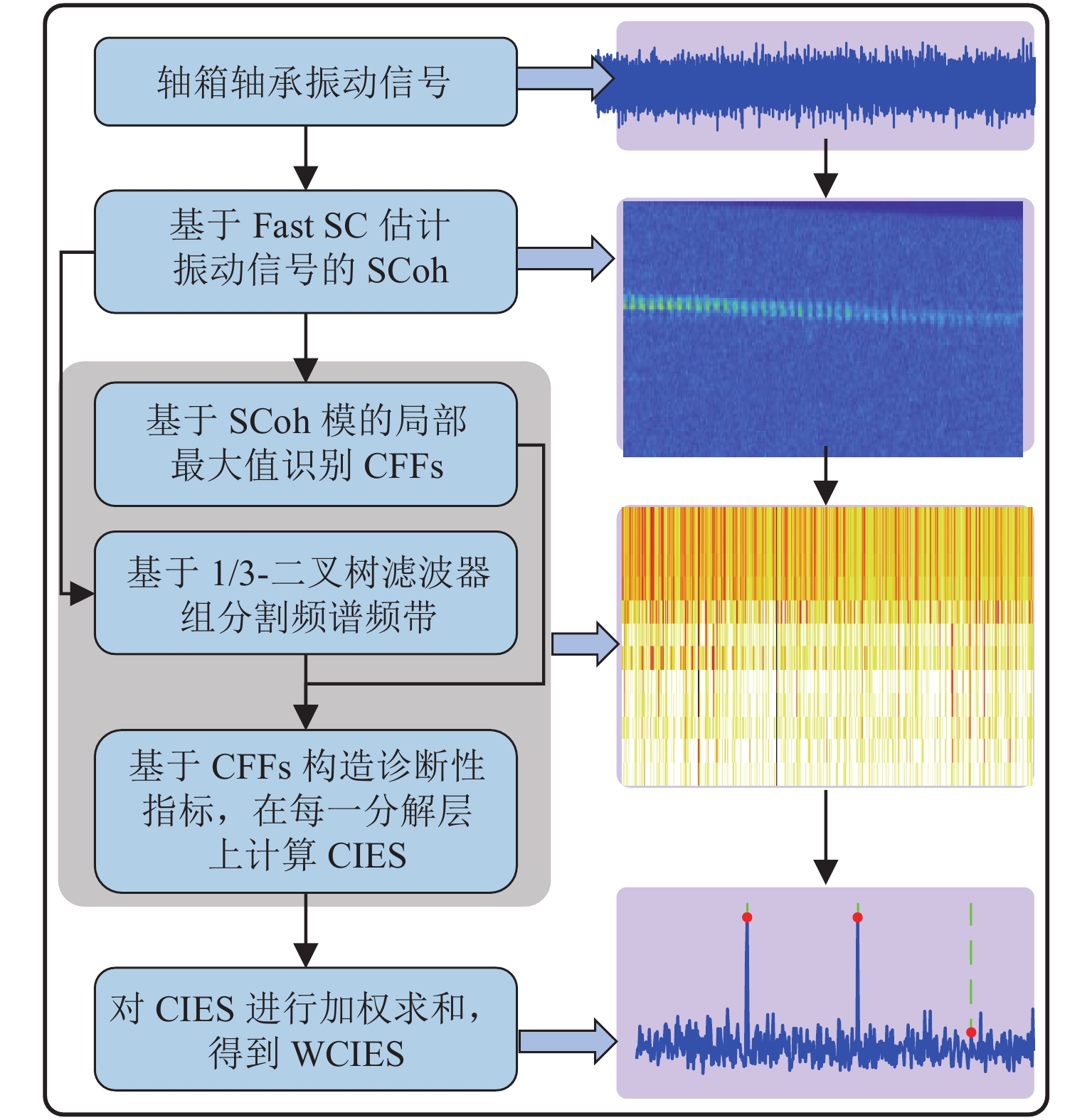
为解决列车轴箱轴承微弱故障特征在宽频带上难以提取的问题,基于轴承故障信号的二阶循环平稳特性,提出了一种利用加权联合提升包络谱进行故障诊断的方法. 首先,利用谱相干算法将振动信号分解到由频谱频率和循环频率构成的双频域,实现振动信号在全频带内的精细化解调,并基于谱相干的局部特征识别轴承候选故障频率;接着,利用1/3二叉树滤波器将频谱频率分割为不同中心频率和带宽的窄带,在窄带内沿着频谱频率对谱相干的模进行积分,得到窄带提升包络谱;然后,以候选故障频率在窄带提升包络谱中的能量占比为诊断性指标,在每一分解层上构造联合提升包络谱;最后,对不同分解层的联合提升包络谱进行加权平均,得到轴承振动信号的加权联合提升包络谱. 轨道车辆轴箱轴承台架试验信号的研究结果表明:所提方法的优势在于能充分整合分布于不同窄带内的轴承故障信息,且不依赖于名义故障周期信息;和现有方法相比,能更有效地揭示轴承故障特征频率及其谐波特征,在提取和识别轴箱轴承微弱故障方面具有一定优势.
Abstract:Since the weak fault feature of train axle-box bearings is difficult to be extracted in a wide frequency band, this paper proposes a weighted combined improved envelope spectrum (WCIES) for fault diagnosis based on the second-order cyclostationary of bearing fault signals. First, the fine demodulation of the vibration signal in the full frequency band is achieved by decomposing the vibration signal into the dual-frequency domain composed of spectral and cyclic frequencies through the spectral coherence algorithm. The candidate fault frequency of the bearing is identified based on the local feature of spectral coherence. Then, the 1/3-binary tree filter is applied to divide the spectral frequency into a series of narrowbands with different center frequencies and bandwidths, and the mode of spectral coherence is integrated along the spectral frequency in the narrow band to obtain the narrowband IES. Then, the CIES of each decomposition layer is constructed by taking the ratio of the energy of the candidate fault frequency in the narrowband IES as the diagnostic index. Finally, the weighted average of the WCIES of different decomposition layers is performed, and the WCIES of the bearing vibration signal is obtained. The research results show that the advantage of the proposed method is that it can fully integrate the bearing fault information distributed in different narrowbands and does not depend on the nominal fault period information. Compared with the existing methods, it can more effectively reveal the characteristic frequency and harmonic characteristics of bearing faults and has advantages in extracting and identifying weak faults of axle-box bearings.
-

图 2 轴箱轴承试验台与故障轴承
Figure 2. Axle-box bearing test rig and the faulty elements of axle-box bearings

图 3 轴箱轴承外圈故障信号及其包络谱
Figure 3. Axle-box bearing outer race fault signal and its envelope spectrum

图 4 外圈故障信号的SCoh及其EES
Figure 4. SCoh and the corresponding EES of the axle-box bearing outer race fault signal

图 5 轴箱轴承外圈故障信号的CIES与WCIES
Figure 5. CIES and WCIES of the axle-box bearing outer race fault signal

图 6 轴箱轴承内圈故障信号及其包络谱
Figure 6. Axle-box bearing inner race fault signal and its envelope spectrum

图 7 轴箱轴承内圈故障信号的SCoh及其EES
Figure 7. SCoh and the corresponding EES of the axle-box bearing inner race fault signal

图 8 轴箱轴承内圈故障信号的CIES与WCIES
Figure 8. CIES and WCIES of the axle-box bearing inner race fault signal

图 9 轴箱轴承滚子故障信号及其包络谱
Figure 9. Axle-box bearing rolling element fault signal and its envelope spectrum

图 10 轴箱轴承滚子故障信号的SCoh及其EES
Figure 10. SCoh and the corresponding EES of the axle-box bearing rolling element fault signal

图 11 轴箱轴承滚子故障信号的CIES与WCIES
Figure 11. CIES and WCIES of the axle-box bearing rolling element fault signal
-
[1] 张卫华. 高速列车耦合大系统动力学理论与实践[M]. 北京: 科学出版社, 2013. [2] LEI Y G, HE Z J, ZI Y Y, et al. EEMD method and WNN for fault diagnosis of locomotive roller bearings[J]. Expert Systems With Applications, 2011, 38(6): 7334-7341. doi: 10.1016/j.eswa.2010.12.095 [3] 陈雪峰. 智能运维与健康管理[M]. 北京: 机械工业出版社, 2018. [4] 郭亮,李长根,高宏力,等. 大数据背景下基于特征学习的机械设备剩余寿命预测[J]. 西南交通大学学报,2021,56(4): 730-735,768.GUO Liang, LI Changgen, GAO Hongli, et al. Residual life prediction of mechanical equipment based on feature learning in big data background[J]. Journal of Southwest Jiaotong University, 2021, 56(4): 730-735,768. [5] ANTONI J. Cyclic spectral analysis in practice[J]. Mechanical Systems and Signal Processing, 2007, 21(2): 597-630. doi: 10.1016/j.ymssp.2006.08.007 [6] 万书亭,彭勃. 基于非局部均值去噪和快速谱相关的滚动轴承早期故障诊断方法[J]. 中南大学学报(自然科学版),2020,51(1): 76-85.WAN Shuting, PENG Bo. Early fault diagnosis method of rolling bearing based on nonlocal mean denoising and fast spectral correlation[J]. Journal of Central South University (Science and Technology), 2020, 51(1): 76-85. [7] WANG D, ZHAO X J, KOU L L, et al. A simple and fast guideline for generating enhanced/squared envelope spectra from spectral coherence for bearing fault diagnosis[J]. Mechanical Systems and Signal Processing, 2019, 122: 754-768. doi: 10.1016/j.ymssp.2018.12.055 [8] MAURICIO A, SMITH W A, RANDALL R B, et al. improved envelope spectrum via feature optimisation-gram (IESFOgram): a novel tool for rolling element bearing diagnostics under non-stationary operating conditions[J]. Mechanical Systems and Signal Processing, 2020, 144: 106891.1-106891.14. doi: 10.1016/j.ymssp.2020.106891 [9] CHENG Y, WANG S B, CHEN B Y, et al. An improved envelope spectrum via candidate fault frequency optimization-gram for bearing fault diagnosis[J]. Journal of Sound and Vibration, 2022, 523: 116746.1-116746.19. [10] MAURICIO A, GRYLLIAS K. Cyclostationary-based multiband envelope spectra extraction for bearing diagnostics: the combined improved envelope spectrum[J]. Mechanical Systems and Signal Processing, 2021, 149: 107150.1-107150.13. doi: 10.1016/j.ymssp.2020.107150 [11] ALEXANDRE M, QI JUNYU, SMITH W A, et al. Bearing diagnostics under strong electromagnetic interference based on Integrated Spectral Coherence[J]. Mechanical Systems and Signal Processing, 2020, 140: 106673.1-106673.15. doi: 10.1016/j.ymssp.2020.106673 [12] ZHANG B Y, MIAO Y H, LIN J, et al. Weighted envelope spectrum based on the spectral coherence for bearing diagnosis[J]. ISA Transactions, 2022, 123: 398-412. doi: 10.1016/j.isatra.2021.05.012 [13] CHEN B Y, CHENG Y, ZHANG W H, et al. Enhanced bearing fault diagnosis using integral envelope spectrum from spectral coherence normalized with feature energy[J]. Measurement, 2022, 189: 110448.1-110448.19. doi: 10.1016/j.measurement.2021.110448 [14] ANTONI J, XIN G, HAMZAOUI N. Fast computation of the spectral correlation[J]. Mechanical Systems and Signal Processing, 2017, 92: 248-277. doi: 10.1016/j.ymssp.2017.01.011 [15] CHENG Y, CHEN BY, ZHANG W H. Enhanced spectral coherence and its application to bearing fault diagnosis[J]. Measurement, 2022, 188: 110418. doi: 10.1016/j.measurement.2021.110418 [16] MOSHREFZADEH A, FASANA A. The Autogram: an effective approach for selecting the optimal demodulation band in rolling element bearings diagnosis[J]. Mechanical Systems and Signal Processing, 2018, 105: 294-318. doi: 10.1016/j.ymssp.2017.12.009 [17] ANTONI J. Fast computation of the kurtogram for the detection of transient faults[J]. Mechanical Systems and Signal Processing, 2007, 21(1): 108-124. doi: 10.1016/j.ymssp.2005.12.002 -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 795
- HTML全文浏览量: 358
- PDF下载量: 82
- 被引次数: 0