

Review of Roadway Facility Design for Self-Driving Cars
-
摘要:
随着智能网联车辆相关技术的不断突破和快速发展,高度自动化的无人驾驶汽车日益成熟并将逐渐进入大众生活. 区别于人工驾驶车辆,无人驾驶汽车具备环境感知、自主决策、控制执行等功能,能够完成典型工况或所有工况的自动驾驶. 而对道路设施进行改进和调整,有助于加快无人驾驶时代的到来,为此,需要明确无人驾驶汽车对道路设施设计的需求和影响. 首先,在平纵线形、横断面设计、交通标志标线、停车设施和数字化道路设施等方面分析了道路设施如何适应无人驾驶汽车的行驶特性;其次,梳理了智慧路侧设施以及无人驾驶专用车道的现状和发展趋势;再次,归纳了国内外面向无人驾驶汽车的道路基础设施的研究方法,包括虚拟仿真测试和实车道路测试,以及国内外为开展实车测试所实施的实验道路建设;最后,总结了现有研究的聚焦点和局限性,展望了该领域所面临的挑战和未来发展趋势. 现有道路基础设施的规划设计没有预见无人驾驶汽车的到来,在无人驾驶全面普及之前,人工驾驶和无人驾驶混行会长时间存在,因此,道路设施设计应根据无人驾驶的发展阶段和未来趋势进行相应的变革,本文为适应无人驾驶汽车的道路设施设计提供了理论基础.
Abstract:With the continuous breakthrough and development of intelligent connected vehicle technologies, highly automated self-driving cars have gradually matured and entered public life. Different from manual driving cars, self-driving cars integrate the functions of environmental perception, independent decision-making, as well as control and execution. As a result, it can complete the self-driving for typical or all roadway conditions. The improvement and adjustment in roadway facilities will help to speed up the arrival of the self-driving era. Therefore, it is necessary to clarify the demand and impact of self-driving cars on the design of roadway facilities. Firstly, how the roadway facilities adapt to the driving behavior of self-driving cars was analyzed from five aspects such as horizontal and vertical alignment, cross-section design, traffic signs and markings, parking facilities, and digital roadway facilities. Secondly, the status and development trends of smart roadside facilities and self-driving exclusive lanes were summed up. Then, the research methods of roadway facilities for self-driving cars in China and abroad were summarized, including virtual simulation tests and field driving tests, and the experimental roadways constructed for field driving tests around the world were reviewed. Finally, the focus of and the limitations of existing research were summarized, and the challenges and future development trends of this research field were prospected. The planning and design of existing roadway facilities do not foresee the arrival of self-driving cars; before the widespread popularization of self-driving, manual driving and self-driving cars will coexist for a long time. Therefore, roadway facilities should be designed according to the development stage and future trends of self-driving. This work provides a theoretical basis for roadway facility design adapted to self-driving cars.
-
Key words:
- self-driving cars /
- self-driving /
- roadway facility /
- roadway design /
- self-driving exclusive lanes
-

图 1 无人驾驶与人工驾驶车辆对竖曲线半径的行驶需求差异
Figure 1. Driving demand difference in vertical curve radius between self-driving car and manual driving car
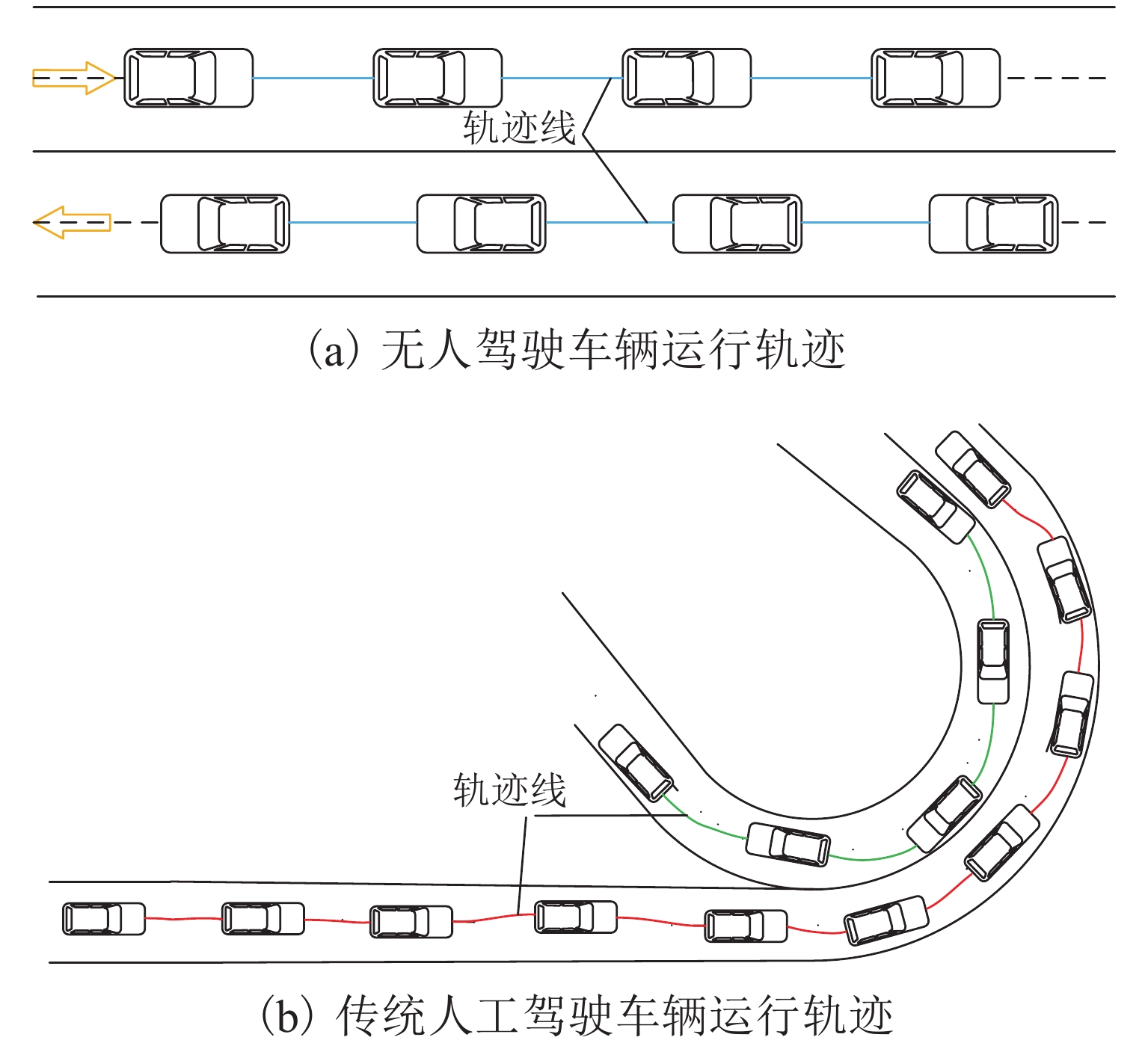
图 3 传统人工驾驶车辆和无人驾驶车辆的行驶轨迹
Figure 3. Trajectories of traditional manual driving car and self-driving car
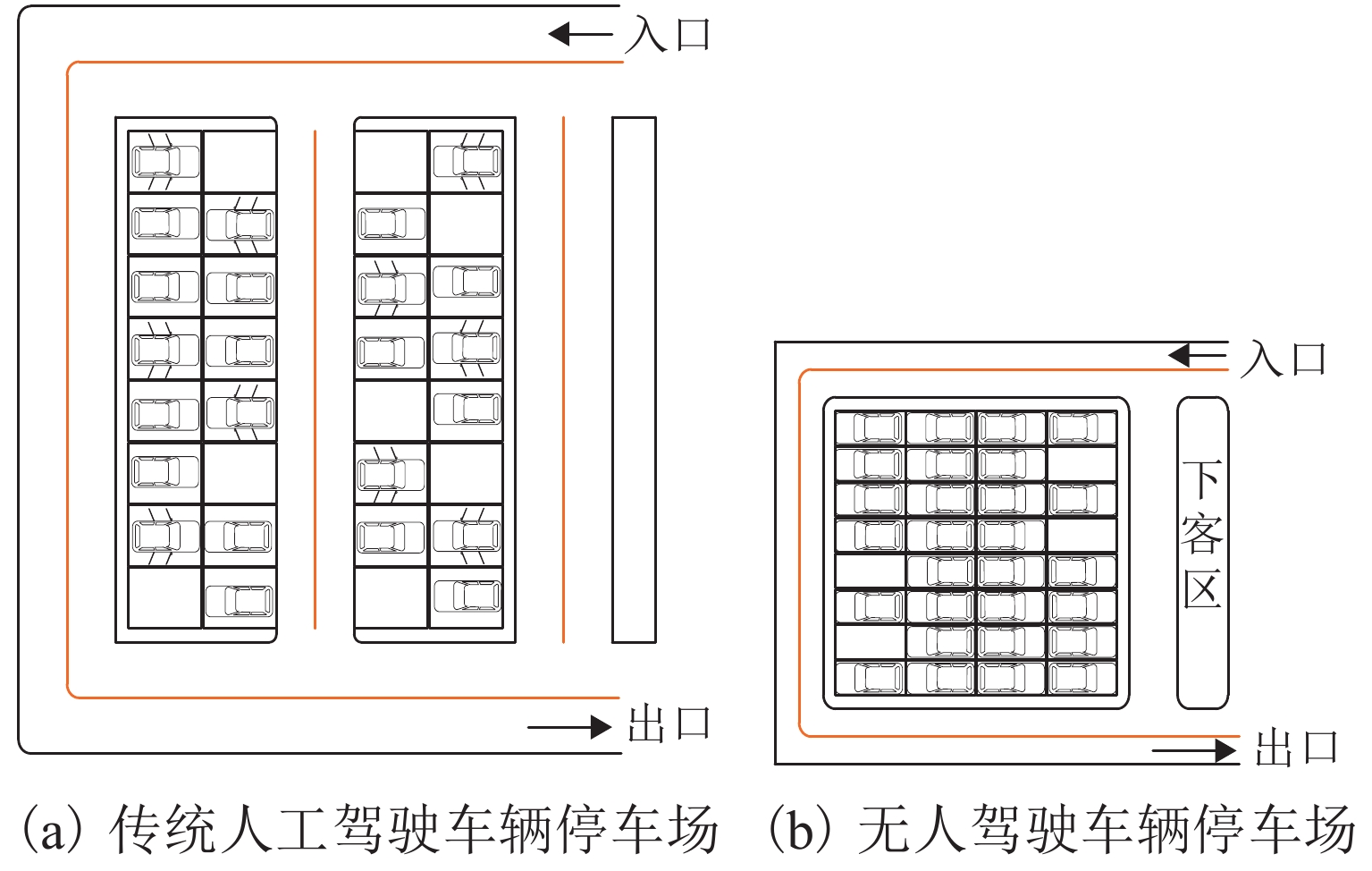
图 4 传统人工驾驶与无人驾驶停车场占地对比
Figure 4. Comparison between parking lots for traditional manual driving car and self-driving car
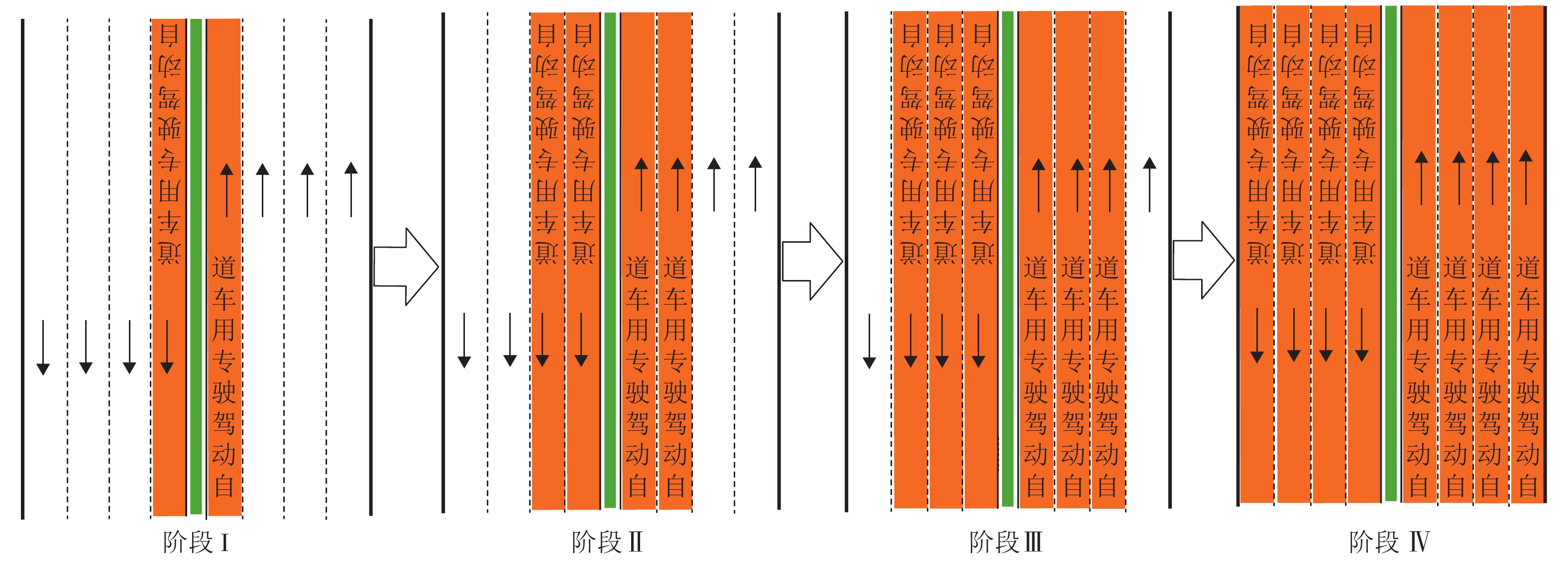
图 5 由自动驾驶专用车道过渡到自动驾驶道路(以双向八车道为例)
Figure 5. Transition from self-driving exclusive lane to self-driving roadway (taking two-way roadway with eight lanes as an example)
表 1 无人驾驶超高速公路等级划分
Table 1. Classification of self-driving superhighways
公路等级 超三级高速 超二级高速 超一级高速 设计速度/
(km•h−1)180、160、
140160、140、
120140、120、
100 下载: 导出CSV
下载: 导出CSV
表 2 专用车道的隔离方式
Table 2. Isolation methods of exclusive lane
隔离方式 实现隔离的设施 适用条件 优点 缺点 标线隔离 路面施画漆条 任意条件下驶入驶出专用道 灵活性高,车辆可
在任何位置驶出驶入
专用车道驶出专用车道容易与人工驾驶车辆发生冲突;人工驾驶车辆可任意进出专用车道 缓冲带 导流线 + 道钉 连续弯道或事故多发路段 有缓冲区域,提供
安全空间占地较大,车辆还是可以随意驶入驶出自动驾驶专用车道 硬质隔离 混凝土防撞栏、波梁护栏、矩形护栏、组合式防撞栏 连续弯道、长下坡、事故多发路段 隔离程度高,防撞
性能强,安全性较高不易拆装,缺乏一定便捷性,发生交通事故或其他紧急事故时,特殊车辆进出困难 软质隔离 橡胶棒、塑料隔离墩、弹性交通柱 高架道路分流端、道路沿线较小交叉路口两侧、危险地点 易拆装,安装使用
灵活材质偏软,不能起到缓冲隔离的安全性作用;容易损坏 行车道颜色 彩色路面 任意条件下驶入驶出专用道 灵活性高;醒目,
专用路权效果显著驶出专用车道容易与正常行驶车流发生冲突;人工驾驶车辆可任意进出专用车道
下载: 导出CSV
-
[1] KHOURY J, AMINE K, ABI SAAD R. An initial investigation of the effects of a fully automated vehicle fleet on geometric design[J]. Journal of Advanced Transportation, 2019, 1208: 1-10. [2] OTHMAN K. Impact of autonomous vehicles on the physical infrastructure: changes and challenges[J]. Designs, 2021, 5(3): 1-30. [3] SEN S, ROESLER J R. Human-centered geometric design of roads using an autonomous vehicle problem[C]//Middle Atlantic ASEE Section Spring 2021 Conference. New York: ASEE, 2021: 1-19. [4] MACHIANI S G, JAHANGIRI A, MELENDEZ B, et al. Safety Impact evaluation of a narrow-automated vehicle-exclusive reversible lane on an existing smart freeway[R]. Washington D. C.: San Diego State University, 2021. [5] GOPALAKRISHNA D, CARLSON P J, SWEATMAN P, et al. Impacts of automated vehicles on highway infrastructure[R]. Washington D. C.: Federal Highway Administration, 2021. [6] CHEN F, BALIEU R, KRINGOS N. Potential influences on long-term service performance of road infrastructure by automated vehicles[J]. Transportation Research Record: Journal of the Transportation Research Board, 2016, 2550(1): 72-79. doi: 10.3141/2550-10 [7] LI B B, SONG D Z, LI H F, et al. Lane marking quality assessment for autonomous driving[C]//2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Spain: IEEE, 2019: 1-9. [8] 杨晓寒,暴连胜,顾思思. 高速公路车路协同自动驾驶条件及技术研究[J]. 公路交通科技(应用技术版),2019,15(2): 262-266. [9] 何永明. 超高速公路安全保障与经济评价研究[D]. 哈尔滨: 东北林业大学, 2017. [10] 印顺超. 车联网环境下完全自动驾驶高速公路几何设计标准研究[D]. 西安: 长安大学, 2021. [11] 李智,孔翎旭,王刚,等. 采用平均应力坡度评价沥青路面的抗滑衰变特性[J]. 公路工程,2018,43(5): 33-36,41. doi: 10.3969/j.issn.1674-0610.2018.05.007LI Zhi, KONG Lingxu, WANG Gang, et al. Evaluation of anti-sliding attenuation of asphalt pavement by average value of slope[J]. Highway Engineering, 2018, 43(5): 33-36,41. doi: 10.3969/j.issn.1674-0610.2018.05.007 [12] SHI W J, ALAWIEH M B, LI X, et al. Algorithm and hardware implementation for visual perception system in autonomous vehicle: a survey[J]. Integration, 2017, 59: 148-156. [13] 黄晓明,蒋永茂,郑彬双,等. 基于路表摩擦特性的无人驾驶车辆安全制动原理与方法[J]. 科学通报,2020,65(30): 3328-3340. doi: 10.1360/TB-2020-0029HUANG Xiaoming, JIANG Yongmao, ZHENG Binshuang, et al. Principle and method of safe braking of unmanned vehicles based on the friction characteristics of road surface[J]. Chinese Science Bulletin, 2020, 65(30): 3328-3340. doi: 10.1360/TB-2020-0029 [14] FERREIRA M, DAMAS L, CONCEICÃO H, et al. Self-automated parking lots for autonomous vehicles based on vehicular ad hoc networking[C]//2014 IEEE Intelligent Vehicles Symposium Proceedings. Dearborn: IEEE, 2014: 472-479. [15] NOURINEJAD M, BAHRAMI S, ROORDA M J. Designing parking facilities for autonomous vehicles[J]. Transportation Research Part B: Methodological, 2018, 109: 110-127. doi: 10.1016/j.trb.2017.12.017 [16] ZHANG W W, GUHATHAKURTA S. Parking spaces in the age of shared autonomous vehicles: how much parking will we need and where?[J]. Transportation Research Record: Journal of the Transportation Research Board, 2017, 2651(1): 80-91. doi: 10.3141/2651-09 [17] GRIGORESCU S, TRASNEA B, COCIAS T, et al. A survey of deep learning techniques for autonomous driving[J]. Journal of Field Robotics, 2020, 37(3): 362-386. doi: 10.1002/rob.21918 [18] YANG B S, DONG Z, LIU Y, et al. Computing multiple aggregation levels and contextual features for road facilities recognition using mobile laser scanning data[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2017, 126: 180-194. doi: 10.1016/j.isprsjprs.2017.02.014 [19] 王秋红,李艳芬,周炎. 面向车路协同路侧设备运维管理平台研究[J]. 电子技术应用,2020,46(12): 36-38. doi: 10.16157/j.issn.0258-7998.201120WANG Qiuhong, LI Yanfen, ZHOU Yan. Research on the operation and maintenance management platform of vehicle-to-road coordination road-side equipment[J]. Application of Electronic Technique, 2020, 46(12): 36-38. doi: 10.16157/j.issn.0258-7998.201120 [20] 中国道路交通安全协会. 车联网路侧设施设置指南: T/CTS 1—2020[S]. 北京: 中国标准出版社, 2020 . [21] 周兰孙,郑豆豆. 基于高速公路ETC门架收费设施的车路协同系统探讨[J]. 中国交通信息化,2020(11): 99-101. doi: 10.13439/j.cnki.itsc.2020.11.008 [22] 朱涵. 车联网路侧单元部署算法研究[D]. 大连: 大连理工大学, 2016. [23] 吴湧. 车联网路侧单元部署问题的研究[D]. 桂林: 广西师范大学, 2018. [24] 李志龙. 车联网中路侧单元部署策略研究[D]. 上海: 上海交通大学, 2019. [25] 王健. 面向车路协同的路侧节点部署与异构网络切换方法[D]. 西安: 长安大学, 2015. [26] FOGUE M, SANGUESA J A, MARTINEZ F J, et al. Improving roadside unit deployment in vehicular networks by exploiting genetic algorithms[J]. Applied Sciences, 2018, 8(1): 86-107. doi: 10.3390/app8010086 [27] MASSOBRIO R, TOUTOUH J, NESMACHNOW S. Multi-objective evolutionary algorithms for smart placement of roadside units in vehicular networks[M]. Florida: Chapman & Hall (CRC Press), 2017. [28] GUERNA A, BITAM S. GICA: an evolutionary strategy for roadside units deployment in vehicular networks[C]//2019 International Conference on Networking and Advanced Systems (ICNAS). Annaba: IEEE, 2019: 1-6. [29] SAEED T U. Road infrastructure readiness for autonomous vehicles[D]. West Lafayette: Purdue University , 2019. [30] RAD S R, FARAH H, TAALE H, et al. Design and operation of dedicated lanes for connected and automated vehicles on motorways: a conceptual framework and research agenda[J]. Transportation Research Part C: Emerging Technologies, 2020, 117: 102664.1-102664.18. [31] OAKES ASH L, TRICKER J, DAWN A, et al. Roads for the future dedicated driverless spaces-city[R]. London: City Science, 2018. [32] LIU Z C, SONG Z Q. Strategic planning of dedicated autonomous vehicle lanes and autonomous vehicle/toll lanes in transportation networks[J]. Transportation Research Part C: Emerging Technologies, 2019, 106: 381-403. doi: 10.1016/j.trc.2019.07.022 [33] CHEN Z B, HE F, ZHANG L H, et al. Optimal deployment of autonomous vehicle lanes with endogenous market penetration[J]. Transportation Research Part C: Emerging Technologies, 2016, 72: 143-156. doi: 10.1016/j.trc.2016.09.013 [34] LIU Y Y, TIGHT M, SUN Q X, et al. A systematic review: road infrastructure requirement for connected and autonomous vehicles (CAVs)[J]. Journal of Physics: Conference Series, 2019, 1187(4): 042073.1-042073.14. [35] UZAIR M. Who is liable when a driverless car crashes?[J]. World Electric Vehicle Journal, 2021, 12(2): 62-88. doi: 10.3390/wevj12020062 [36] LIU H, KAN X D, SHLADOVER S E, et al. Modeling impacts of cooperative adaptive cruise control on mixed traffic flow in multi-lane freeway facilities[J]. Transportation Research Part C: Emerging Technologies, 2018, 95: 261-279. doi: 10.1016/j.trc.2018.07.027 [37] National Automated Highway System Consortium. Downselect system configurations and workshop[R]. Washington D. C.: National Automated Highway System Consortium, 1997. [38] 王贺鹏,李志斌,王立. 自动驾驶仿真的虚拟交通信号系统分析及实现[J]. 汽车实用技术,2020(7): 34-37. doi: 10.16638/j.cnki.1671-7988.2020.07.011WANG Hepeng, LI Zhibin, WANG Li. Analysis and implementation of virtual traffic signal system for autopilot simulation[J]. Automobile Technology, 2020(7): 34-37. doi: 10.16638/j.cnki.1671-7988.2020.07.011 [39] 王白凡,刘小洁,杜鹏. 基于VISSIM的自动驾驶车队的行程时间可靠度研究[J]. 交通世界,2020(28): 6-9. doi: 10.3969/j.issn.1006-8872(s).2020.10.003 [40] 宋振伟. 基于FPGA 的车辆自动驾驶系统的研究与仿真设计[D]. 哈尔滨: 哈尔滨工业大学, 2014. [41] 林泓熠,魏政君,钟宇婷,等. 基于Autoware的无人驾驶小车平台设计与实验仿真[J]. 机电工程技术,2021,50(6): 130-133,172.LIN Hongyi, WEI Zhengjun, ZHONG Yuting, et al. Platform design and experimental simulation of autonomous vehicle based on Autoware[J]. Mechanical & Electrical Engineering Technology, 2021, 50(6): 130-133,172. [42] 王楠,刘卫国,张君媛,等. 汽车ACC系统纵向控制六模式切换策略仿真研究[J]. 交通信息与安全,2014,32(4): 143-148. doi: 10.3963/j.issn.1674-4861.2014.04.026WANG Nan, LIU Weiguo, ZHANG Junyuan, et al. Simulation test of a new six-mode switching controller for enhanced adapt cruise control[J]. Journal of Transport Information and Safety, 2014, 32(4): 143-148. doi: 10.3963/j.issn.1674-4861.2014.04.026 -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 1192
- HTML全文浏览量: 532
- PDF下载量: 149
- 被引次数: 0