

Design and Characteristics of Null-Flux Permanent Magnet Electrodynamic Suspension System
-
摘要:
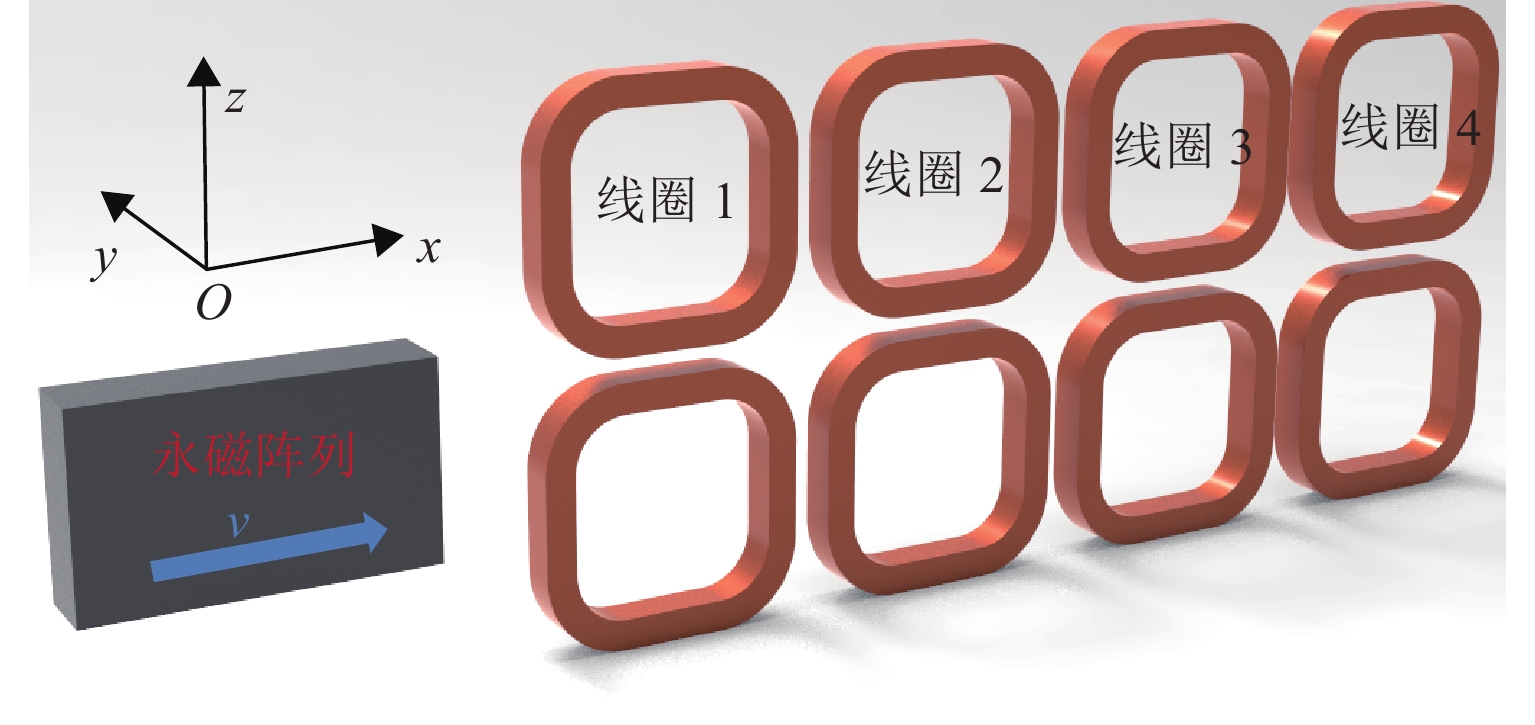
为改善平板式永磁电动悬浮导向能力弱、磁阻力大的问题,提出一种新型的永磁电动悬浮系统. 首先,阐述系统的结构及原理并建立包含磁体纵向边端效应的三维电磁力解析模型并求解;其次,搭建三维有限元模型,通过对比解析模型计算结果与有限元仿真结果验证了解析模型的准确性和可靠性,并基于有限元模型分析了电磁力的时域特征和磁体与轨道线圈间的电磁耦合过程;最后,以浮重比和浮阻比为性能指标,研究了系统的悬浮性能及浮阻特性,其结果与平板式电动悬浮系统进行对比分析. 研究结果表明:该系统具有可行性,其结构简单、能耗低、浮阻比大且克服了导体板式永磁电动悬浮导向能力弱、浮阻比小的问题;在中高速域内,其浮阻比可达65,是平板式永磁电动悬浮的2.5倍;本文提出的系统及三维电磁力解析模型可为未来的磁悬浮交通发展提供参考.
Abstract:A novel permanent magnet electrodynamic suspension system is proposed to improve the guidance ability and reduce the drag force. First, a three-dimensional electromagnetic-force analytical model considering the longitudinal end-edge effect of the magnets is established and solved. Second, a three-dimensional finite element model is built. Compared with simulation results, the accuracy and reliability of the analytical model are verified. On the basis of the finite element model, the time domain characteristics of electromagnetic forces and the coupling process between the magnets and the guideway coils are analyzed. Finally, the levitation performance and levitation-drag characteristics of the system are studied according to the levitation-to-weight ratio and the levitation-to-drag ratio. Compared with those of a flat-type electrodynamic suspension system, the results reveal that the proposed system is feasible, with a simple structure, low energy consumption, and large levitation-to-drag ratio. The system overcomes issues associated with a weak guidance ability and a low levitation-to-drag ratio. In the high-speed range, the levitation-to-drag ratio can reach 65, which is 2.5 times higher than that of planar permanent magnet electrodynamic suspension. The proposed system and the corresponding three-dimensional analytical model can lay a foundation for future maglev transportation.
-
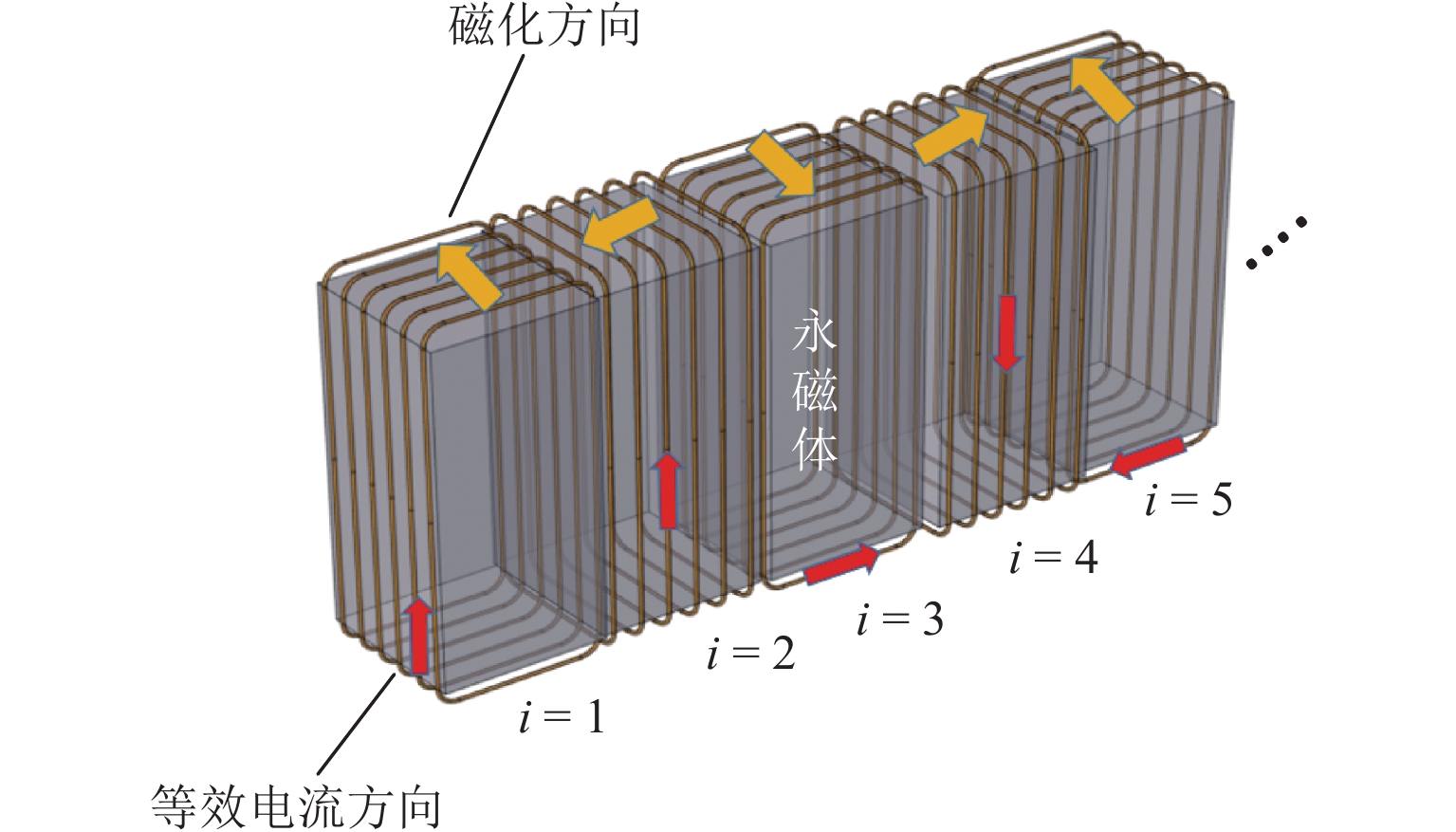
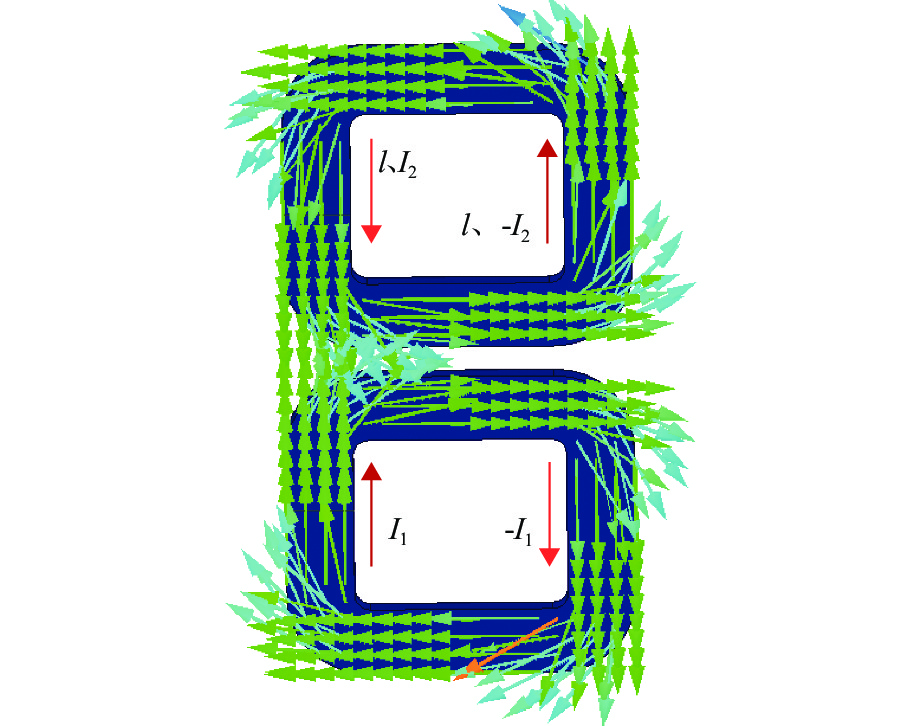
图 2 永磁体阵列等效为线圈分布示意
Figure 2. Schematic diagram of the distribution of coil which is the equivalent of PM

图 6 数值模型与仿真模型电磁力的对比验证
Figure 6. Verification on the electromagnetic forces of analytical and simulation model

图 8 单阵列与多线圈相互作用的电磁力及感应电流
Figure 8. Electromagnetic forces and the induction current under the interaction of single array and multiple coils

图 9 单阵列与多线圈的相互作用过程
Figure 9. Electromagnetic interaction process between single array and multiple coils
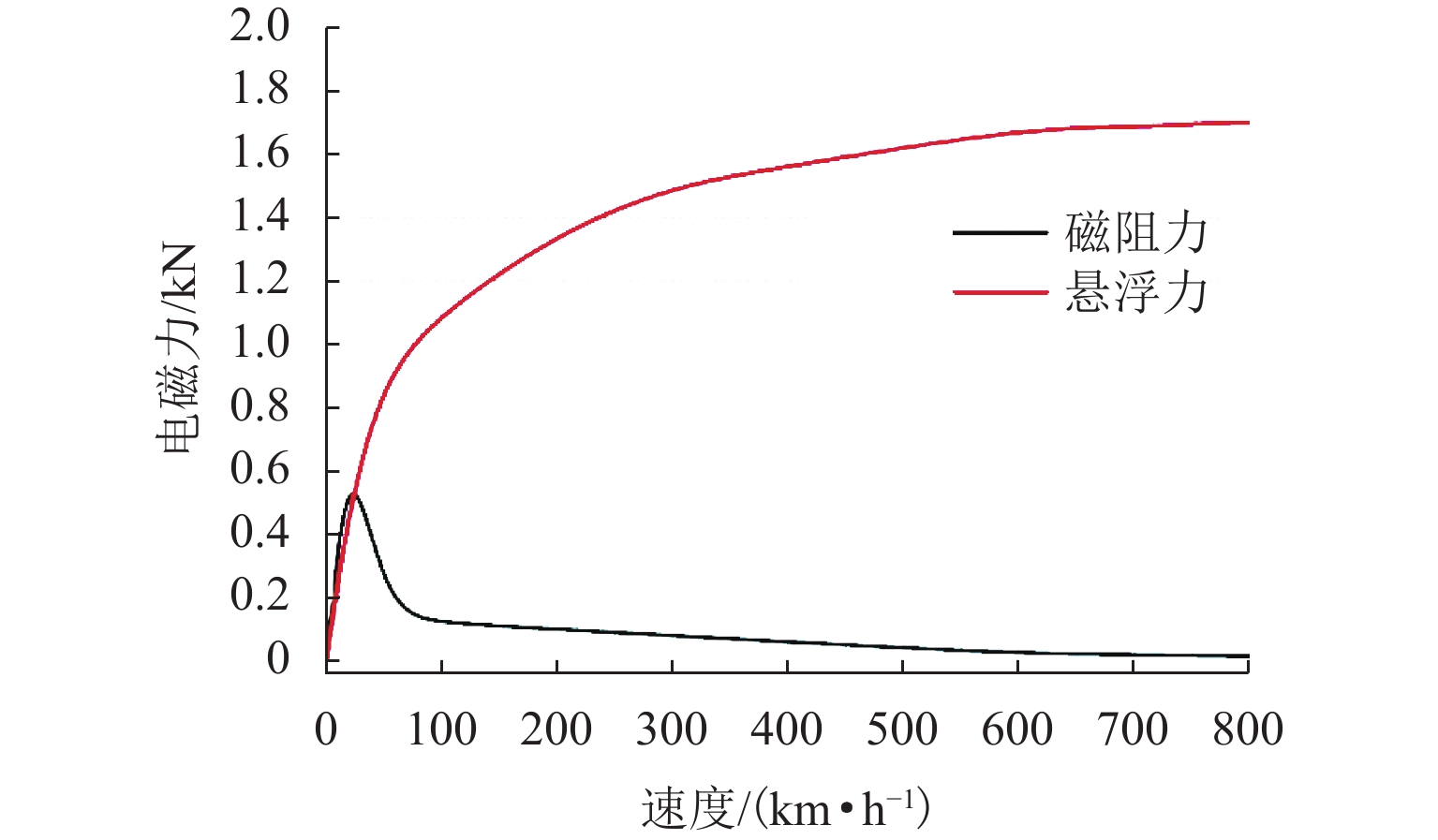
图 11 零磁通线圈式电动悬浮的电磁力随速度的变化
Figure 11. Levitation and drag forces as functions of velocity of null-flux electrodynamic suspension system
-
[1] 翟婉明,赵春发. 现代轨道交通工程科技前沿与挑战[J]. 西南交通大学学报,2016,51(2): 209-226. doi: 10.3969/j.issn.0258-2724.2016.02.001ZHAI Wanming, ZHAO Chunfa. Frontiers and challenges of sciences and technologies in modern railway engineering[J]. Journal of Southwest Jiaotong University, 2016, 51(2): 209-226. doi: 10.3969/j.issn.0258-2724.2016.02.001 [2] 邓自刚,刘宗鑫,李海涛,等. 磁悬浮列车发展现状与展望[J]. 西南交通大学学报,2022,57(3): 455-474.DENG Zigang, LIU Zongxin, LI Haitao, et al. Development status and prospect of maglev train[J]. Journal of Southwest Jiaotong University, 2022, 57(3): 455-474. [3] SHI H F, DENG Z G, ZHANG B J, et al. Thermal-force coupling analysis of permanent magnet electrodynamic wheel system for maglev car[J]. IEEE Transactions on Magnetics, 2023, 59(1): 6300109.1-6300109.9. [4] ZHAI M D, LONG Z Q, LI X L. A new strategy for improving the tracking performance of magnetic levitation system in maglev train[J]. Symmetry, 2019, 11(8): 1-18. doi: 10.3390/sym11081053 [5] BONFITTO A, TONOLI A, SILVAGNI M. Sensorless active magnetic dampers for the control of rotors[J]. Mechatronics, 2017, 47: 195-207. doi: 10.1016/j.mechatronics.2016.11.001 [6] GALLUZZI R, AMATI N, TONOLI A. Modeling, design, and validation of magnetic hysteresis motors[J]. IEEE Transactions on Industrial Electronics, 2020, 67(2): 1171-1179. doi: 10.1109/TIE.2019.2901652 [7] 熊嘉阳,邓自刚. 高速磁悬浮轨道交通研究进展[J]. 交通运输工程学报,2021,21(1): 177-198. doi: 10.19818/j.cnki.1671-1637.2021.01.008XIONG Jiayang, DENG Zigang. Research progress of high-speed maglev rail transit[J]. Journal of Traffic and Transportation Engineering, 2021, 21(1): 177-198. doi: 10.19818/j.cnki.1671-1637.2021.01.008 [8] SHEN G, MEISINGER R, SHU G W. Modeling of a high speed MAGLEV train with vertical and lateral control[J].Vehicle System Dynamics: International Journal of Vehicle Mechanics and Mobility, 2007, 46(S1): 643-651. [9] 邓自刚,李海涛. 高温超导磁悬浮车研究进展[J]. 中国材料进展,2017,36(5): 329-334,351. doi: 10.7502/j.issn.1674-3962.2017.05.02DENG Zigang, LI Haitao. Recent development of high-temperature superconducting maglev[J]. Materials China, 2017, 36(5): 329-334,351. doi: 10.7502/j.issn.1674-3962.2017.05.02 [10] POWELL J R, DANBY G T. Magnetic suspension for levitated tracked vehicles[J]. Cryogenics, 1971, 11(3): 192-204. doi: 10.1016/0011-2275(71)90311-0 [11] OHASHI S, UEDA N. Dependence of the quenched SC coil position on the transient motion of the superconducting magnetically levitated bogie[J]. IEEE Transactions on Applied Superconductivity, 2016, 26(4): 3601804.1-3601804.4. [12] TAKAHASHI N, SUZUKI M. Verification of practical applicability of cable wiring for PLG ground coils to maglev systems[J]. Quarterly Report of RTRI, 2013, 54(1): 52-58. doi: 10.2219/rtriqr.54.52 [13] MONTGOMEY D B, RODERICK L. A novel magpipe pipeline transportation system using linear motor drives[J]. Proceedings of the IEEE, 2009, 97(11): 1848-1855. [14] GENERAL ATOMICS. Low speed maglev technology development program[R]. [S.l.]: U.S. Department of Transportation, 2002: 1-59. [15] 李春生,杜玉梅,夏平畴,等. 磁浮列车工程中的Halbach永久磁体结构的优化[J]. 工程设计学报,2007,14(4): 334-337,348. doi: 10.3785/j.issn.1006-754X.2007.04.015LI Chunsheng, DU Yumei, XIA Pingchou, et al. Structure optimization of PM halbach array for EDS maglev[J]. Journal of Engineering Design, 2007, 14(4): 334-337,348. doi: 10.3785/j.issn.1006-754X.2007.04.015 [16] 李春生,杜玉梅,夏平畴,等. 直线型Halbach磁体和导体板构成的电动式磁悬浮系统的分析及实验[J]. 电工技术学报,2009,24(1): 18-22. doi: 10.3321/j.issn:1000-6753.2009.01.004LI Chunsheng, DU Yumei, XIA Pingchou, et al. Analysis and experimental testing of EDS maglev with linear halbach and conducting sheet[J]. Transactions of China Electrotechnical Society, 2009, 24(1): 18-22. doi: 10.3321/j.issn:1000-6753.2009.01.004 [17] 秦伟,范瑜,朱熙,等. 永磁电动式磁悬浮装置的研究[J]. 电机与控制学报,2011,15(7): 77-81. doi: 10.3969/j.issn.1007-449X.2011.07.014QIN Wei, FAN Yu, ZHU Xi, et al. Analysis of permanent-magnet electro-dynamic maglev device[J]. Electric Machines and Control, 2011, 15(7): 77-81. doi: 10.3969/j.issn.1007-449X.2011.07.014 [18] ZHANG Z, DENG Z G, ZHANG S, et al. Design and operating mode study of a new concept maglev car employing permanent magnet electrodynamic suspension technology[J]. Sustainability, 2021, 13(11): 5827. doi: 10.3390/su13115827 [19] 罗成,张昆仑,靖永志. 新型Halbach阵列永磁电动悬浮系统垂向稳定性[J]. 交通运输工程学报,2019,19(2): 101-109. doi: 10.3969/j.issn.1671-1637.2019.02.010LUO Cheng, ZHANG Kunlun, JING Yongzhi. Vertical stability of permanent magnet EDS system with novel Halbach array[J]. Journal of Traffic and Transportation Engineering, 2019, 19(2): 101-109. doi: 10.3969/j.issn.1671-1637.2019.02.010 [20] 陈殷,李耀华,李艳. 板式双边永磁电动悬浮三维解析计算[J]. 铁道工程学报,2019,36(12): 29-34.CHEN Yin, LI Yaohua, LI Yan. Three-dimensional analytical calculation of plate-type double permanent magnet electrodynamic suspension[J]. Journal of Railway Engineering Society, 2019, 36(12): 29-34. [21] GUO Z, LI J, ZHOU D. Study of a null-flux coil electrodynamic suspension structure for evacuated tube transportation[J]. Symmetry, 2019, 11(10): 1239. doi: 10.3390/sym11101239 [22] 王一宇,蔡尧,宋旭亮,等. 零磁通式电动悬浮等效模拟系统的特性分析与实验[J]. 电工技术学报,2021,36(8): 1628-1635. doi: 10.19595/j.cnki.1000-6753.tces.200056WANG Yiyu, CAI Yao, SONG Xuliang, et al. Characteristic analysis and experiment of the equivalent simulation system for null-flux electrodynamic suspension[J]. Transactions of China Electrotechnical Society, 2021, 36(8): 1628-1635. doi: 10.19595/j.cnki.1000-6753.tces.200056 [23] 巫川,李冠醇,王东. 永磁电动悬浮系统三维解析建模与电磁力优化分析[J]. 电工技术学报,2021,36(5): 924-934. doi: 10.19595/j.cnki.1000-6753.tces.201099WU Chuan, LI Guanchun, WANG Dong. 3-D analytical modeling and electromagnetic force optimization of permanent magnet electrodynamic suspension system[J]. Transactions of China Electrotechnical Society, 2021, 36(5): 924-934. doi: 10.19595/j.cnki.1000-6753.tces.201099 [24] ZHU H L, HUANG H, ZHENG J, et al. A numerical calculation model of multi-magnet-array and 8-shaped null-flux coil for permanent magnet EDS vehicle system[J]. IEEE Transactions on Magnetics, 2022, 58(5): 8300311.1-8300311.11. [25] HALBACH K. Design of permanent multipole magnets with oriented rare earth cobalt material[J]. Nuclear Instruments and Methods, 1980, 169(1): 1-10. doi: 10.1016/0029-554X(80)90094-4 [26] OKUBO T, UEDA N, OHASHI S. Effective control method of the active damper system against the multidirectional vibration in the superconducting magnetically levitated bogie[J]. IEEE Transactions on Applied Superconductivity, 2016, 26(4): 3601804.1-3601804.4. [27] SONG M X, ZHOU D F, YU P C, et al. Analytical calculation and experimental verification of superconducting electrodynamic suspension system using null-flux ground coils[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(9): 14978-14989. [28] MA G T, WANG Y, LUO J, et al. An analytical-experiment coupling method to characterize the electrodynamic suspension system at various speeds[J]. IEEE Transactions on Industrial Electronics, 2022, 69(7): 7170-7180. [29] ARATA M, KAWAI M, YAMASHITA T, et al. Eddy Current loss reduction of superconducting magnets for MAGLEV with a multilayer superconducting sheet[J]. IEEE Transactions on Applied Superconductivity, 1997, 7(2): 912-915. doi: 10.1109/77.614652 [30] 王志涛,蔡尧,龚天勇,等. 基于场–路–运动耦合模型的超导电动悬浮列车特性研究[J]. 中国电机工程学报,2019,39(4): 1162-1171. doi: 10.13334/J.0258-8013.PCSEE.180798WANG Zhitao, CAI Yao, GONG Tianyong, et al. Characteristic studies of the superconducting electrodynamic suspension train with a field-circuit-motion coupled model[J]. Proceedings of the CSEE, 2019, 39(4): 1162-1171. doi: 10.13334/J.0258-8013.PCSEE.180798 -

 下载:
下载:




 点击查看大图
点击查看大图

计量
- 文章访问数: 1141
- HTML全文浏览量: 716
- PDF下载量: 109
- 被引次数: 0