

Simultaneous Wireless Power Supply and Signal Transmission Method for Maglev Vehicle Gap Sensors
-
摘要:
为满足磁浮车悬浮间隙传感器在供电和信号传输方面的需求,提出了一种无线电能与信号全双工同步传输方法. 首先,建立悬浮间隙传感器无线能量与信号全双工同步传输系统,在能量回路中采用S/LCC补偿结构以实现稳压效果,并在信号接收回路采用LC并联支路抑制同侧信号载波干扰;其次,对系统电能传输特性和信号传输特性进行了分析;然后,重点分析了信号传输电压增益、能量传输对信号传输的干扰以及双向信号传输之间的串扰,得出系统参数对系统传输特性影响的规律;最后,搭建20 W的实验平台进行实验验证. 实验结果表明:信号接收回路中采用的LC并联支路可有效消除信号之间的串扰,能量传输对信号传输影响较小,验证了所提拓扑结构可实现无线供电、传感器控制指令下发以及间隙信号上传的全双工同步传输.
Abstract:In order to meet the demand for power supply and signal transmission for maglev vehicle gap sensors, a full-duplex simultaneous wireless power and signal transmission (SWPST) method was proposed. Firstly, the full-duplex SWPST system of the maglev gap sensors was established. The S/LCC compensation structure was adopted in the power circuit to stabilize the voltage, and the LC parallel branch was used in the signal receiving circuit to suppress ipsilateral signal carrier interference. Secondly, the power and signal transmission characteristics of the system were analyzed respectively. Then, the voltage gain of signal transmission, the interference of power transmission on signal transmission, and the crosstalk between bidirectional signal transmission were analyzed. In addition, some laws about the influence of system parameters on the transmission characteristics of the system were obtained. Finally, an experimental platform of 20 W was built. The experimental results show that the LC parallel branch in the signal receiving circuit can effectively eliminate the crosstalk between signals, and power transmission has less impact on signal transmission. It is verified that the proposed topology can realize wireless power supply and full-duplex simultaneous transmission of distributing control commands and uploading gap signals for the sensors.
-
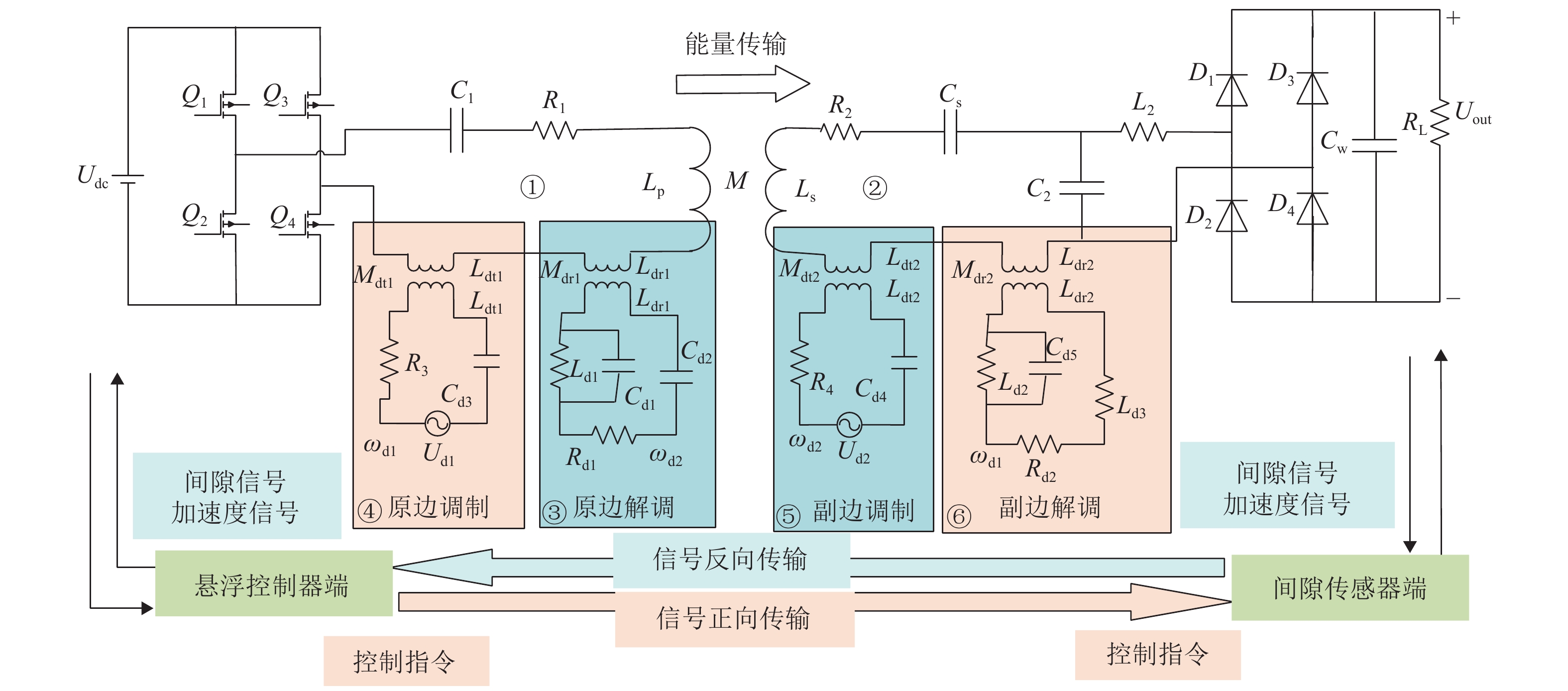
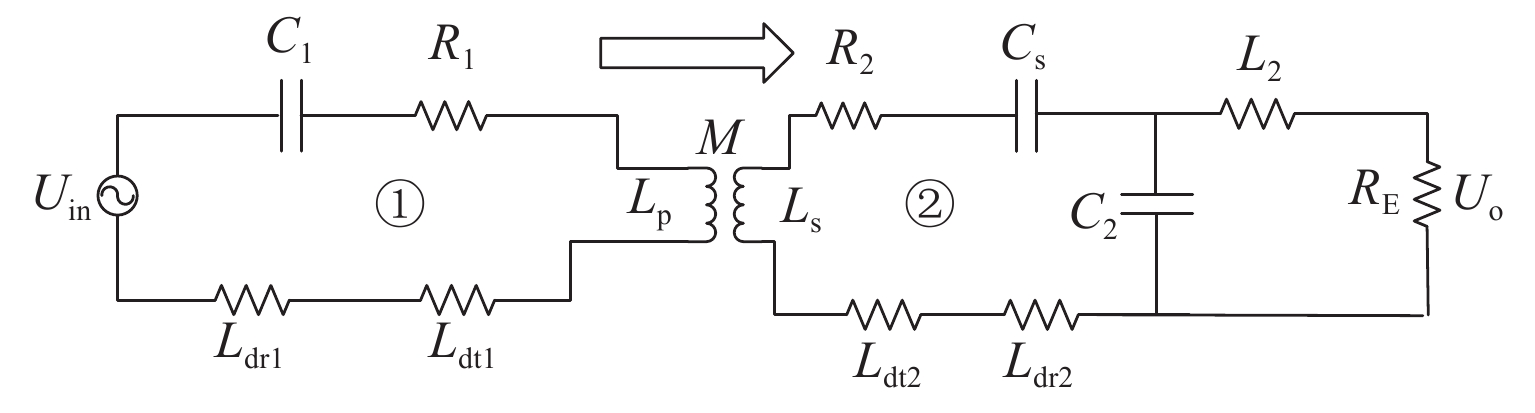
图 1 无线能量与信号全双工同步传输系统结构
Figure 1. Structure of simultaneous wireless power and signal full-duplex transmission system

图 5 电压增益与紧耦合变压器线圈Ldr1和Ldt1的关系
Figure 5. Voltage gain versus tightly coupled transformers Ldr1 and Ldt1
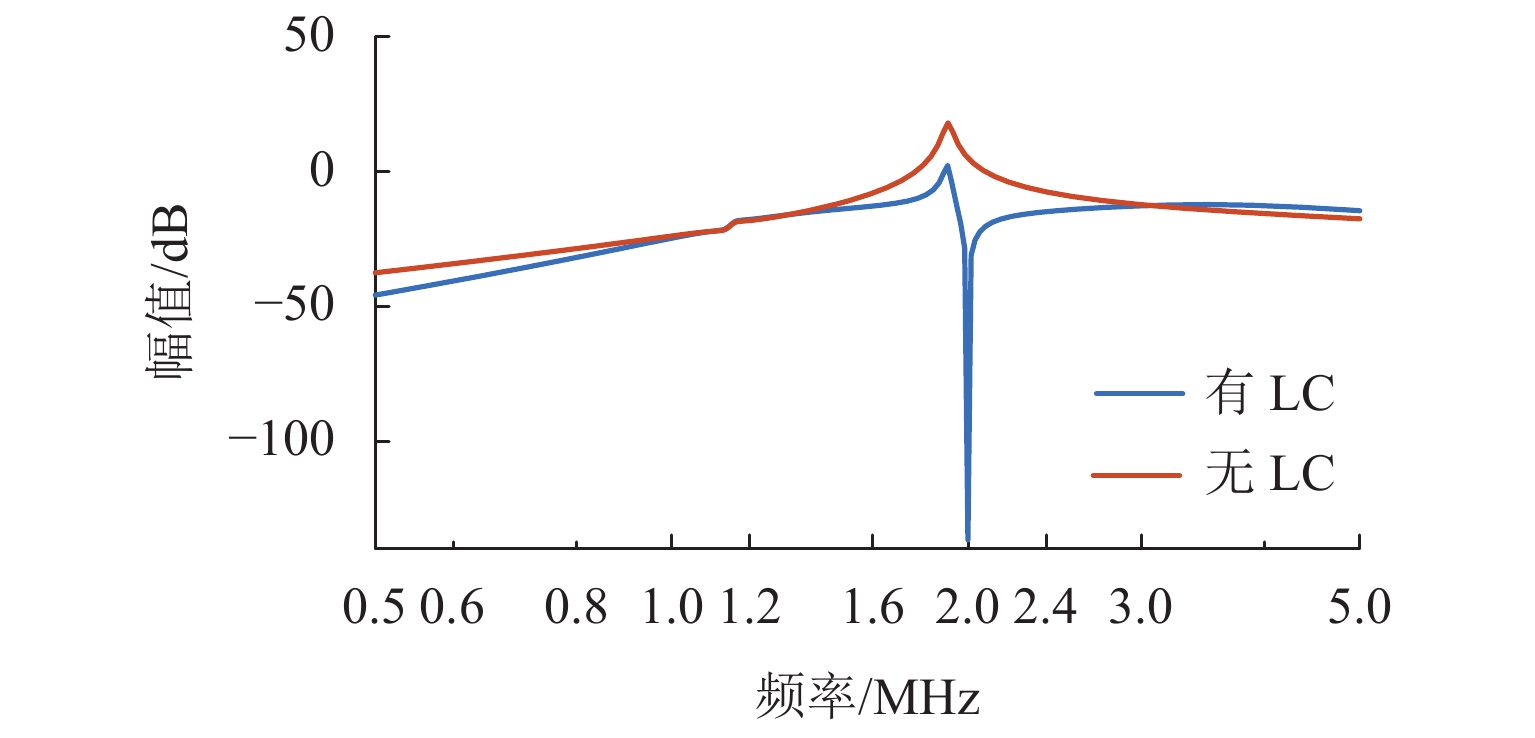
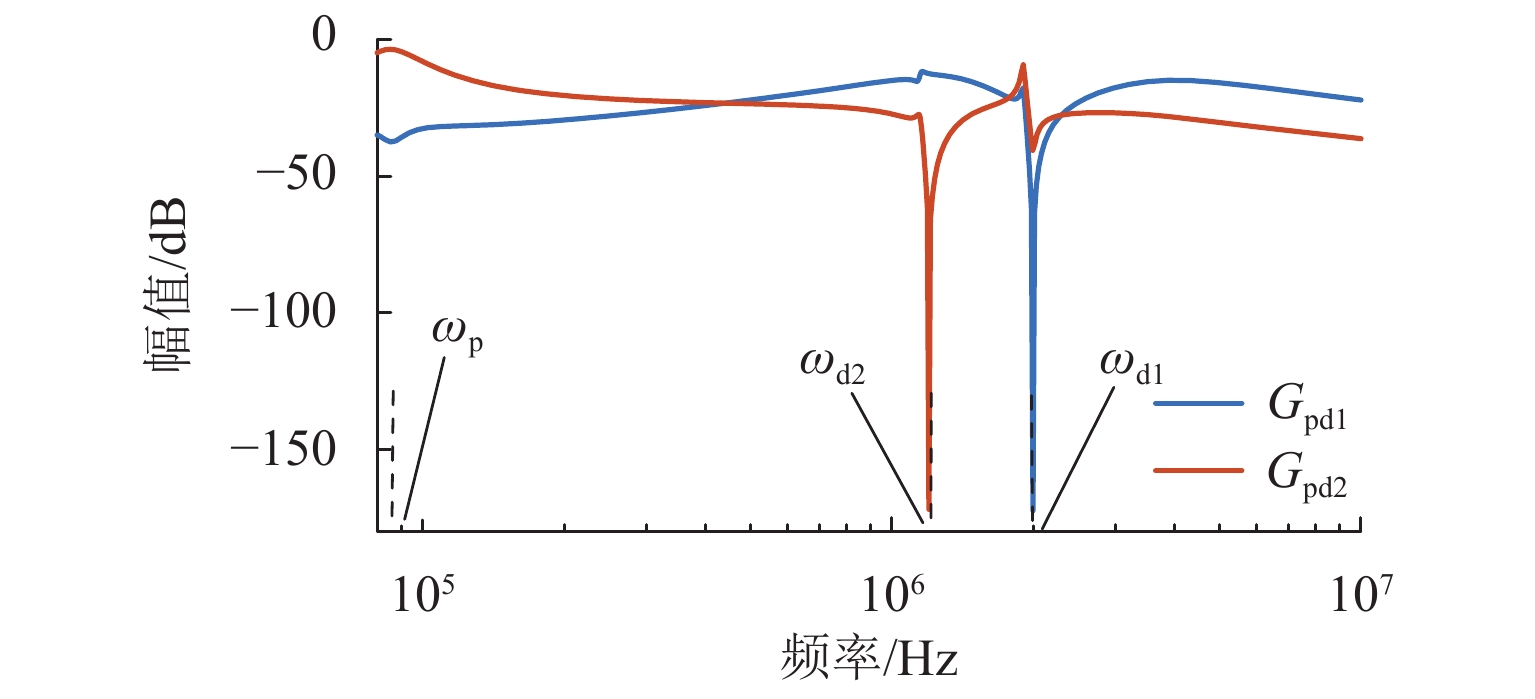
图 9 原边信号源到原边接收回路电压增益
Figure 9. Voltage gain of original-side signal source to original-side receiving circuit
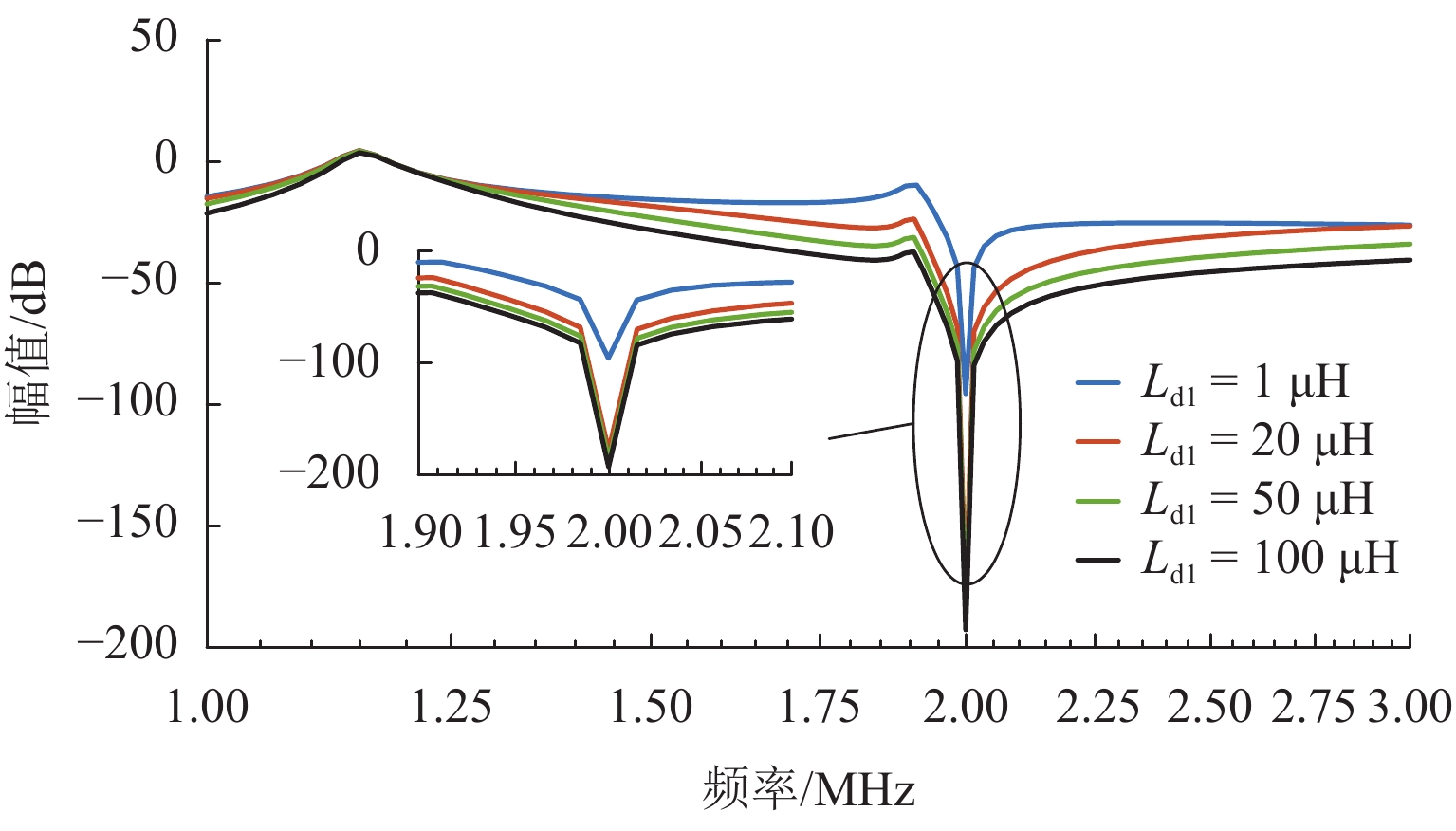
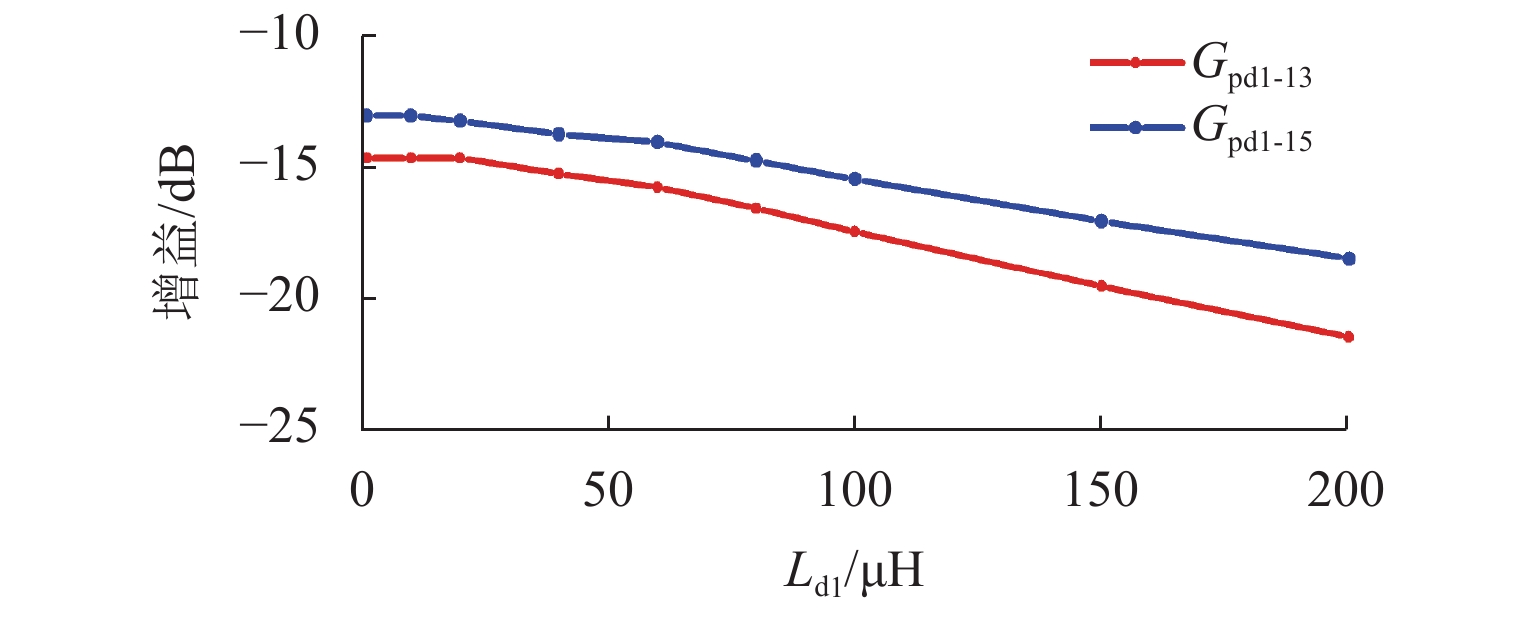
图 10 信号反向传输时电压增益与Ld1关系
Figure 10. Voltage gain versus Ld1 during reverse signal transmission

图 12 松耦合线圈电压Up、Us和负载电压Uout
Figure 12. Voltages of loosely coupled coil Up and Us and load voltage Uout
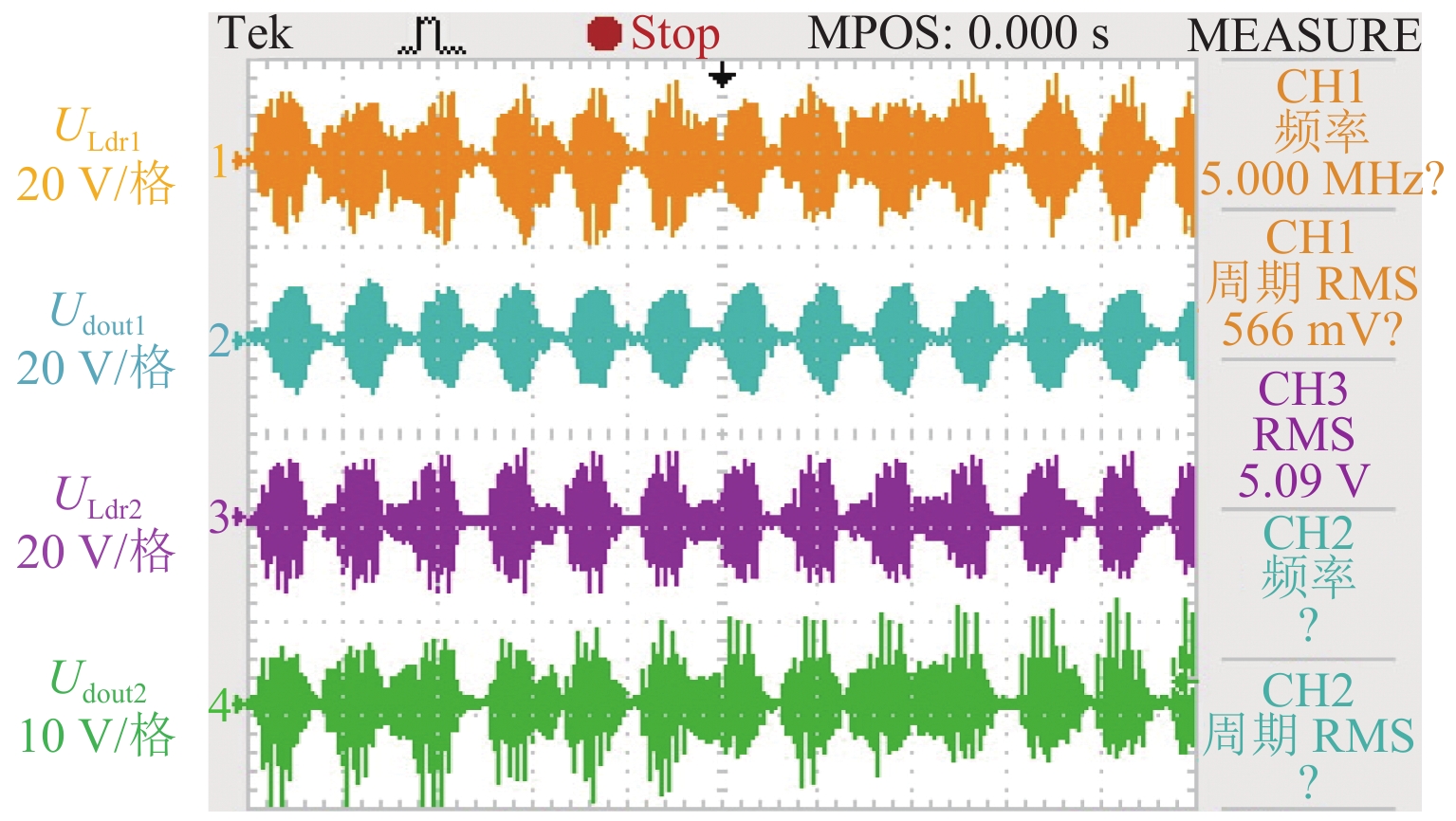
图 13 无能量传输时接收变压器和接收电阻电压
Figure 13. Voltages of receiving transformer and receiving resistor without power transmission
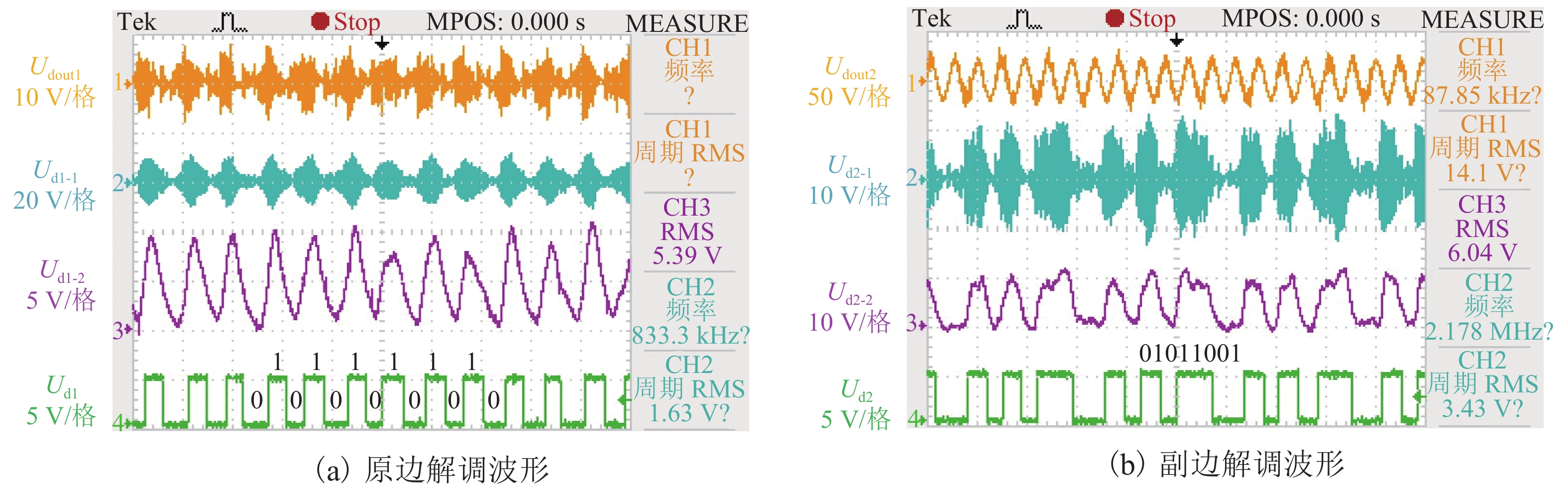
图 14 能量与信号全双工同步传输解调波形
Figure 14. Demodulated waveforms during simultaneous power and signal full-duplex transmission
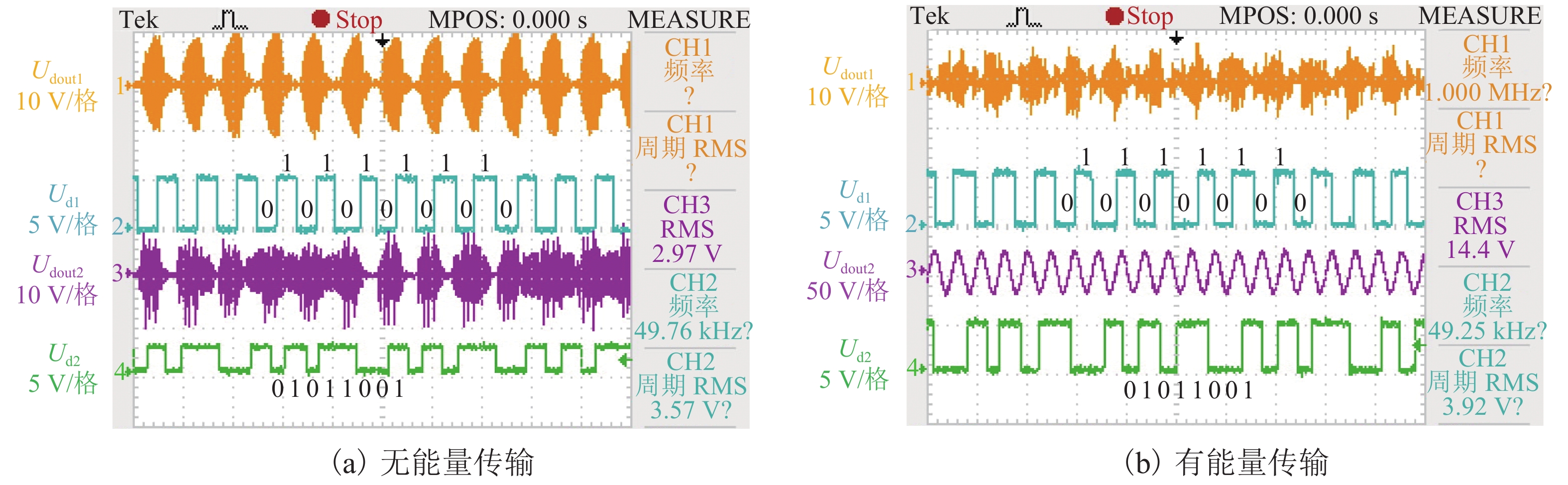
图 15 有无能量传输时信号传输波形
Figure 15. Waveforms of signal transmission with and without power transmission
表 1 系统参数
Table 1. System parameters
参数 数值 参数 数值 RL/Ω 24 Ldt1, Ldt2/μH 5 Lp, Ls/μH 29 Ldr1, Ldr2/μH 10 M/μH 15 Cd1/nF 0.288 C1/nF 88 Cd2/nF 0.396 Cs/nF 140 Cd3/nF 1.270 C2/nF 233 Cd4/nF 3.520 L2/μH 15 Cd5/nF 0.800 Ld1, Ld2/μH 22 Ld3/μH 2.360 R3/Ω 3 R4/Ω 2 Rd1,Rd2/Ω 300 fd1/MHz 2.0 fp/kHz 85 fd2/MHz 1.2 Udc/V 24  下载: 导出CSV
下载: 导出CSV
-
[1] LIN G B, SHENG X W. Application and further development of maglev transportation in China[J]. Transportation Systems and Technology, 2018, 4(3): 36-43. doi: 10.17816/transsyst20184336-43 [2] 范兴明,莫小勇,张鑫. 无线电能传输技术的研究现状与应用[J]. 中国电机工程学报,2015,35(10): 2584-2600. doi: 10.13334/j.0258-8013.pcsee.2015.10.026FAN Xingming, MO Xiaoyong, ZHANG Xin. Research status and application of wireless power transmission technology[J]. Proceedings of the CSEE, 2015, 35(10): 2584-2600. doi: 10.13334/j.0258-8013.pcsee.2015.10.026 [3] DAI X, JIANG J C, XU Z, et al. Cooperative control for multi-excitation units WPT system with multiple coupling parameter identification and area adaptation[J]. IEEE Access, 2020, 8: 38728-38741. doi: 10.1109/ACCESS.2020.2975596 [4] MAI R K, LIU Y R, LI Y, et al. An active-rectifier-based maximum efficiency tracking method using an additional measurement coil for wireless power transfer[J]. IEEE Transactions on Power Electronics, 2018, 33(1): 716-728. doi: 10.1109/TPEL.2017.2665040 [5] LI X F, TANG C S, DAI X, et al. An inductive and capacitive combined parallel transmission of power and data for wireless power transfer systems[J]. IEEE Transactions on Power Electronics, 2018, 33(6): 4980-4991. doi: 10.1109/TPEL.2017.2725990 [6] LEE W S, PARK S, LEE J H, et al. Longitudinally misalignment-insensitive dual-band wireless power and data transfer systems for a position detection of fast-moving vehicles[J]. IEEE Transactions on Antennas and Propagation, 2019, 67(8): 5614-5622. doi: 10.1109/TAP.2019.2916697 [7] 戴欣,杜人杰,唐春森,等. 基于2FSK的ICPT系统高速信号传输方法[J]. 西南交通大学学报,2013,48(5): 892-897.DAI Xin, DU Renjie, TANG Chunsen, et al. A 2FSK-based high-speed signal transmission method for ICPT system[J]. Journal of Southwest Jiaotong University, 2013, 48(5): 892-897. [8] AHMADI M M, GHANDI S. A class-E power amplifier with wideband FSK modulation for inductive power and data transmission to medical implants[J]. IEEE Sensors Journal, 2018, 18(17): 7242-7252. doi: 10.1109/JSEN.2018.2851605 [9] JI L, WANG L F, LIAO C L, et al. Simultaneous wireless power and bidirectional information transmission with a single-coil, dual-resonant structure[J]. IEEE Transactions on Industrial Electronics, 2019, 66(5): 4013-4022. doi: 10.1109/TIE.2018.2831196 [10] 孙跃,闫鹏旭,王智慧,等. ICPT系统电能信号共享通道实时同步传输方法研究[J]. 中国电机工程学报,2016,36(19): 5172-5178,5398. doi: 10.13334/j.0258-8013.pcsee.152071SUN Yue, YAN Pengxu, WANG Zhihui, et al. Research on real-time and synchronization transmission of power and data via a shared channel in inductive coupling power transfer systems[J]. Proceedings of the CSEE, 2016, 36(19): 5172-5178,5398. doi: 10.13334/j.0258-8013.pcsee.152071 [11] 郭尧,魏国,郝潇潇,等. 双谐振耦合能量信息同步传输技术研究[J]. 电工技术学报,2015,30(19): 18-25. doi: 10.3969/j.issn.1000-6753.2015.19.004GUO Yao, WEI Guo, HAO Xiaoxiao, et al. Study on wireless power and information synchronous transfer based on dual resonant coupling circuits[J]. Transactions of China Electrotechnical Society, 2015, 30(19): 18-25. doi: 10.3969/j.issn.1000-6753.2015.19.004 [12] 苏玉刚,孔令鑫,吕志坤,等. 基于FFT解调的ECPT系统全双工通信技术研究[J]. 电工电能新技术,2017,36(4): 1-6.SU Yugang, KONG Lingxin, LV Zhikun, et al. Research on full-duplex communication technology of ECPT system based on FFT demodulation method[J]. Advanced Technology of Electrical Engineering and Energy, 2017, 36(4): 1-6. [13] YAO Y S, CHENG H S, WANG Y J, et al. An FDM-based simultaneous wireless power and data transfer system functioning with high-rate full-duplex communication[J]. IEEE Transactions on Industrial Informatics, 2020, 16(10): 6370-6381. doi: 10.1109/TII.2020.2967023 [14] QIAN Z N, YAN R, WU J D, et al. Full-duplex high-speed simultaneous communication technology for wireless EV charging[J]. IEEE Transactions on Power Electronics, 2019, 34(10): 9369-9373. doi: 10.1109/TPEL.2019.2909303 [15] 国玉刚,崔纳新. LCC-S型无线电能传输系统优化配置及特性研究[J]. 电工技术学报,2019,34(18): 3723-3731.GUO Yugang, CUI Naxin. Research on optimal configuration and characteristics based on LCC-S type wireless power transfer system[J]. Transactions of China Electrotechnical Society, 2019, 34(18): 3723-3731. [16] TRIGUI A, ALI M, HACHED S, et al. Generic wireless power transfer and data communication system based on a novel modulation technique[J]. IEEE Transactions on Circuits and Systems I:Regular Papers, 2020, 67(11): 3978-3990. doi: 10.1109/TCSI.2020.3010308 [17] FAN Y S, SUN Y, DAI X, et al. Simultaneous wireless power transfer and full-duplex communication with a single coupling interface[J]. IEEE Transactions on Power Electronics, 2021, 36(6): 6313-6322. doi: 10.1109/TPEL.2020.3035782 -

 下载:
下载:





 点击查看大图
点击查看大图
计量
- 文章访问数: 554
- HTML全文浏览量: 283
- PDF下载量: 28
- 被引次数: 0