

Compaction Characteristics of Paver Tamper to Mixture Considering Shock Load
-
摘要:
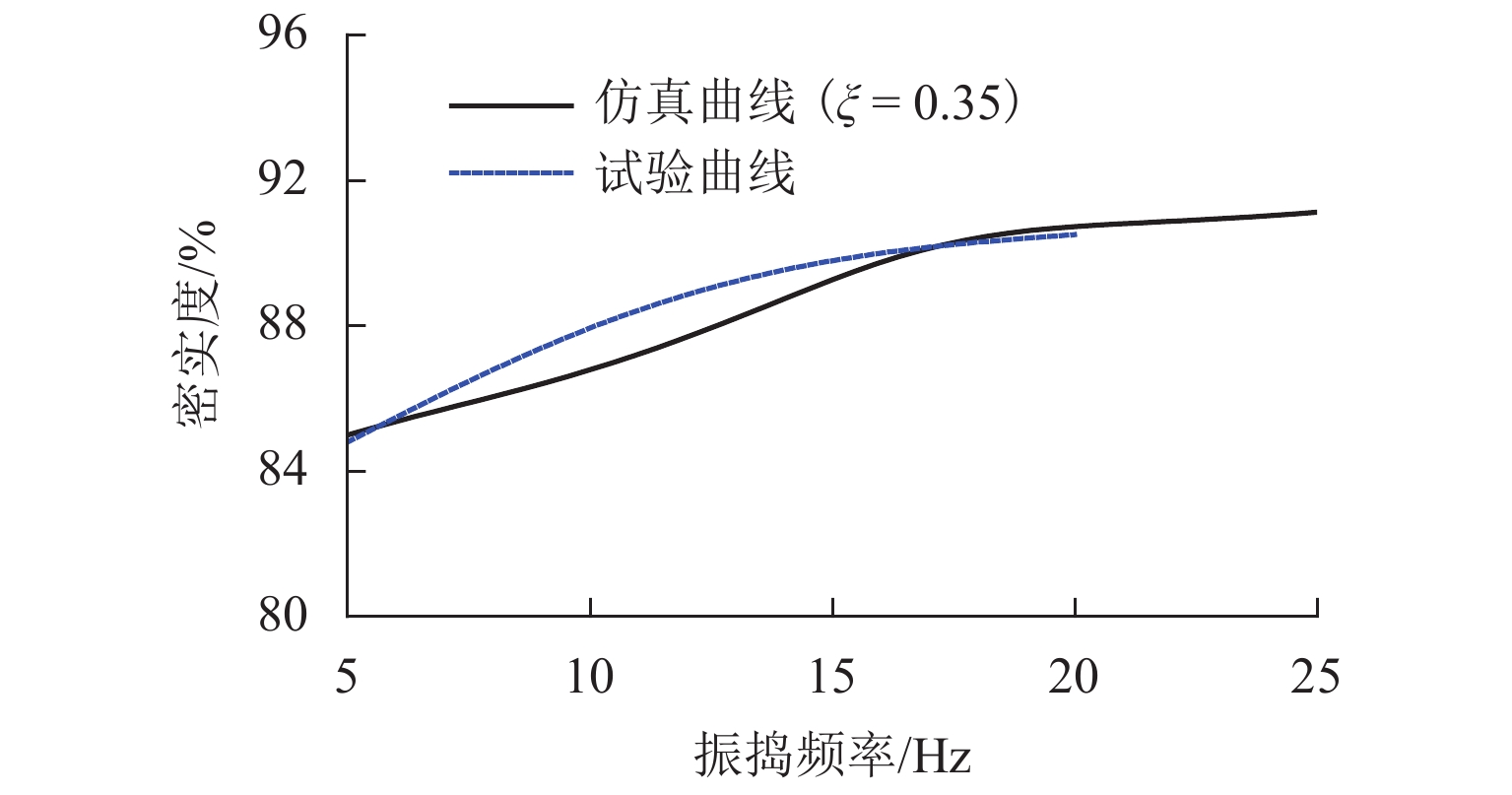
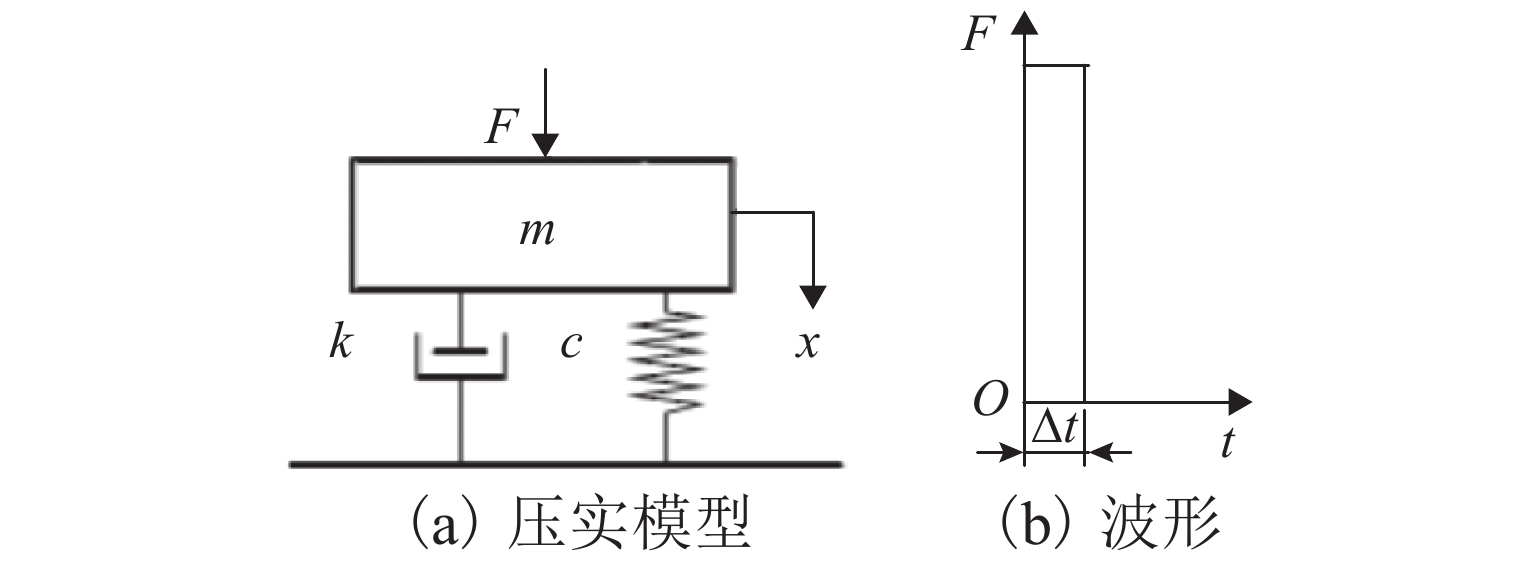
为了提高沥青摊铺机对铺层混合料的初始密实度,针对振捣机构动力学特征,考虑振捣冲击载荷对混合料的影响,建立了铺层材料密实度与振动参数、系统参数之间关系仿真模型,剖析振捣机构对混合料密实度与动态响应关系,揭示振捣压实特性机理. 进行振捣机构对混合料摊铺密实效果的试验研究,得到振捣频率对材料密实度的影响特性曲线,通过不同阻尼参数下的模型分析,确定了振捣峰值密实度出现时的最佳振捣频率,同时对振捣密实度随各谐波频率的变化规律进行仿真计算和试验验证. 研究结果表明:当频率比小于最佳振捣频率比时,密实度对振捣频率变化敏感,随着频率的增加,铺层密实度变化平缓,仿真与试验结果变化规律基本一致;当振捣频率接近最佳振捣频率时,除了与激励频率相同的稳态响应外,还存在频率为2倍激励频率的振动成分;当匹配振捣频率比大于0.45时,会产生高效密实效果. 研究结果可为摊铺机实现对铺层混合料的高效压实提供依据.
Abstract:To improve the initial density of a paving mixture behind the paver, the research of the dynamic characteristics of tamper is needed. In the impact compaction, the vibration shock force will impact mixture. A simulation model reflecting the relationship between paving material compactness and vibration parameters, system parameters was established to analyze the relationship between the compactness and dynamic response of the tamper, and reveal compaction mechanism of tamper. By testing the paving compaction effect of the tamper on the mixture, the paving compactness-frequency curve was obtained. Through analysis of the model with different damping coefficients, the best vibration frequency corresponding to maximum density peak could be determined. Meanwhile the influence of vibration frequency on paving density was analyzed through simulation and experiment. The results show that, when the frequency ratio is less than the best vibration frequency ratio, mixture compactness is sensitive to vibration frequency, and the compactness changes gently with increasing frequency when vibration frequency is larger than the best vibration frequency ratio, so the simulation results are basically consistent with the experimental results. When the vibrating frequency is close to the best vibrating frequency, besides the steady-state response with the same excitation frequency, there is a harmonic vibration component whose frequency is equal to 2 times the excitation frequency. When the frequency ratio is greater than 0.45, the high compacting effect would be obtained for the paving mixture. The research results provide the basis for pavement effective compaction.
-
Key words:
- paver /
- tamper mechanism /
- impact compaction /
- harmonic resonance /
- best vibration frequency
-
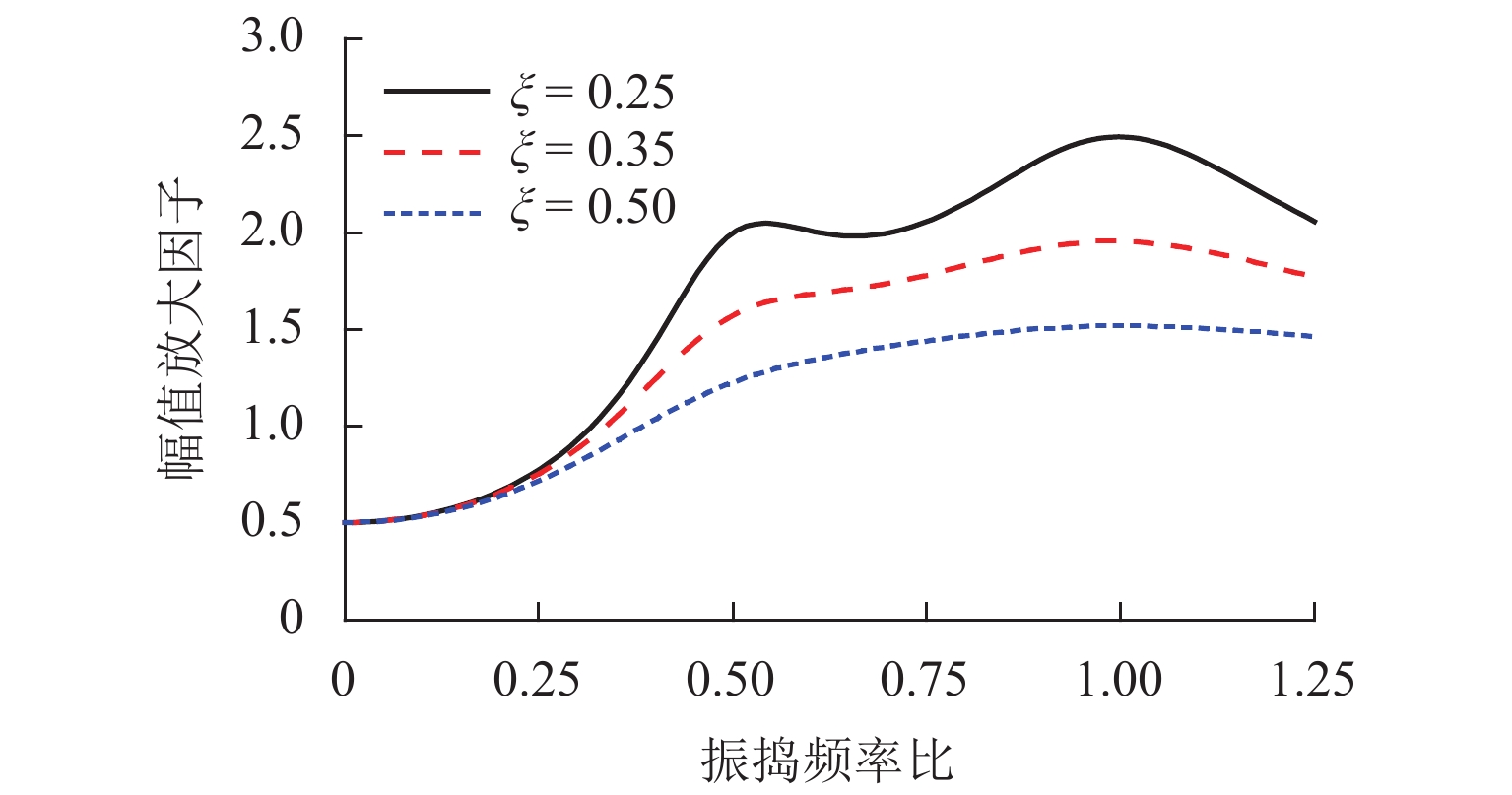
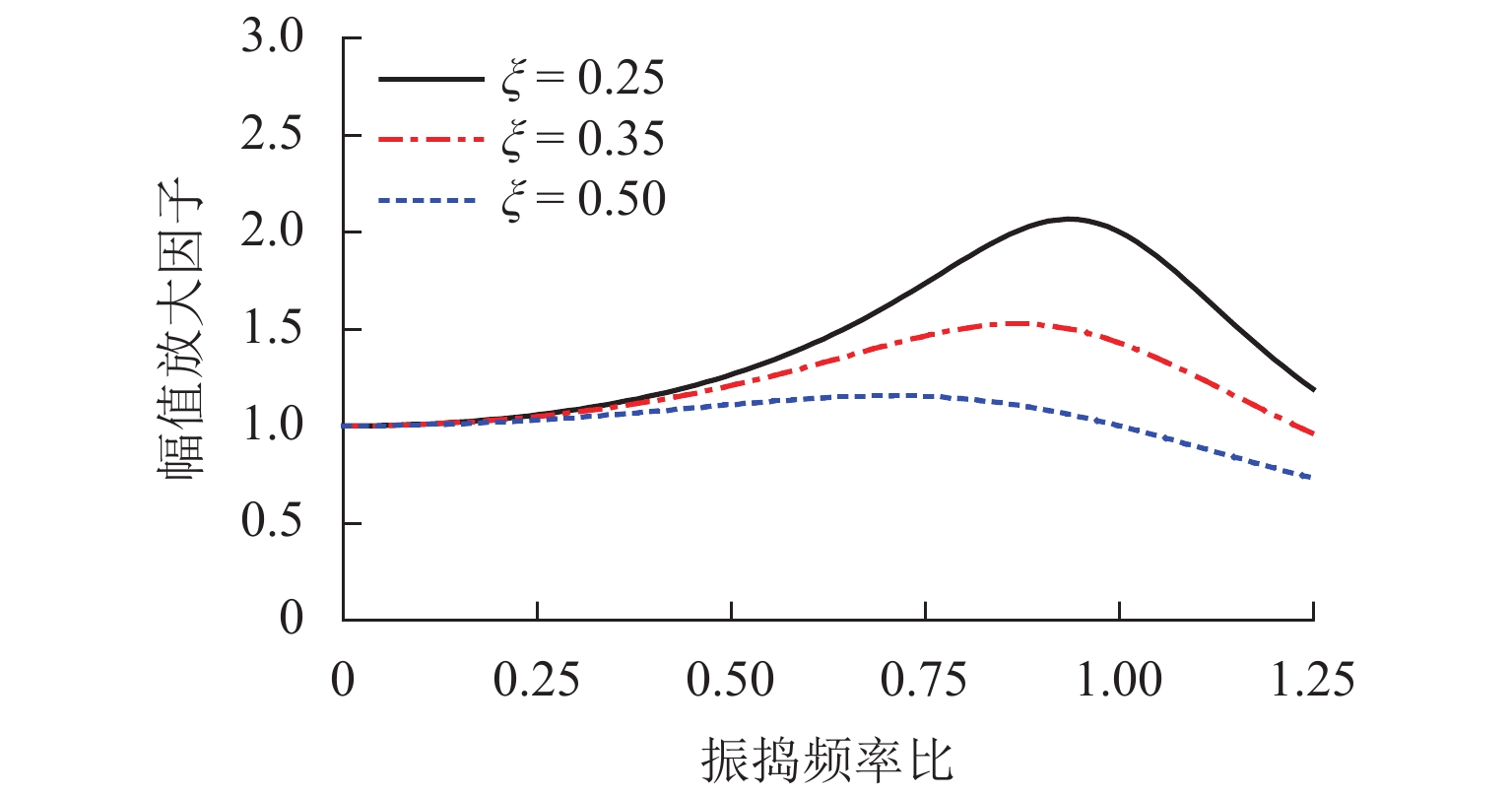
图 6 多级振捣幅值放大因子变化曲线
Figure 6. Amplitude amplification factor curves of multi-series tamper wave
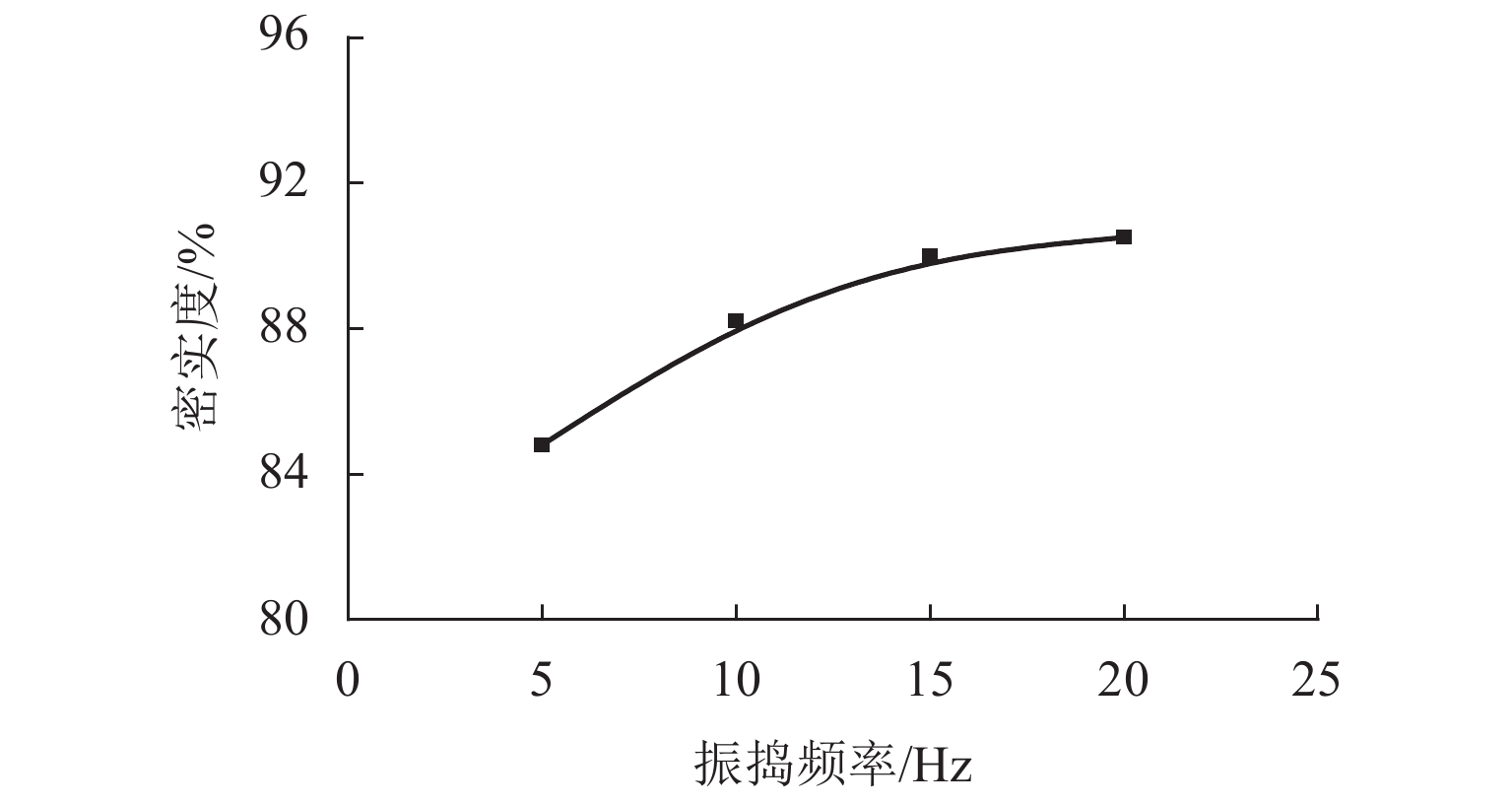
表 1 密实度增长量
Table 1. Density increment
振捣频率/Hz 密实度/% 密实度增量/% 密实度增长系数 5 84.78 2.43 0.489 10 87.96 3.18 0.318 15 89.94 1.02 0.068 20 90.72 0.78 0.039  下载: 导出CSV
下载: 导出CSV
-
[1] WAN Y P, JIA J. Nonlinear dynamics of asphalt-screed interaction during compaction: application to improving paving density[J]. Construction and Building Materials, 2019, 202: 363-373. doi: 10.1016/j.conbuildmat.2018.12.205 [2] BEAINY F, COMMURI S, ZAMAN M. Quality assurance of hot mix asphalt pavements using the intelligent asphalt compaction analyzer[J]. Journal of Construction Engineering and Management, 2012, 138(2): 178-187. doi: 10.1061/(ASCE)CO.1943-7862.0000420 [3] 殷超,张建润,孙志刚,等. 摊铺机熨平板动态特性分析与测试[J]. 东南大学学报(自然科学版),2016,46(6): 1179-1185. doi: 10.3969/j.issn.1001-0505.2016.06.012YIN Chao, ZHANG Jianrun, SUN Zhigang, et al. Dynamic characteristics analysis and test of paver screed[J]. Journal of Southeast University (Natural Science Edition), 2016, 46(6): 1179-1185. doi: 10.3969/j.issn.1001-0505.2016.06.012 [4] WANG Y H, CHONG D, WEN Y. Quality verification of polymer-modified asphalt binder used in hot-mix asphalt pavement construction[J]. Construction and Building Materials, 2017, 150: 157-166. doi: 10.1016/j.conbuildmat.2017.05.196 [5] PLATI C, GEORGIOU P, LOIZOS A. Influence of different roller compaction modes on asphalt mix performance[J]. International Journal of Pavement Engineering, 2016, 17(1): 64-70. doi: 10.1080/10298436.2014.925552 [6] 孙健. 摊铺机振捣器动力学特性分析[J]. 机械设计,2015,32(12): 83-86. doi: 10.13841/j.cnki.jxsj.2015.12.019SUN Jian. Dynamic characteristics analysis of tamper mechanism for paver[J]. Journal of Machine Design, 2015, 32(12): 83-86. doi: 10.13841/j.cnki.jxsj.2015.12.019 [7] 刘东海,高雷,林敏,等. 公路沥青层振动压实质量实时监控与评估[J]. 河海大学学报(自然科学版),2018,46(4): 307-313.LIU Donghai, GAO Lei, LIN Min, et al. Real-time monitoring and assessment of compaction quality for highway asphalt pavements.[J]. Journal of Hohai University (Natural Sciences), 2018, 46(4): 307-313. [8] 金书滨,张长胜,刘政,等. 大吨位压路机碾压大粒径填石路基的动力响应[J]. 铁道科学与工程学报,2016,13(9): 1743-1748. doi: 10.3969/j.issn.1672-7029.2016.09.012JIN Shubin, ZHANG Changsheng, LIU Zheng, et al. The dynamic response of large diameter fill subgrade by large tonnage rollers[J]. Journal of Railway Science and Engineering, 2016, 13(9): 1743-1748. doi: 10.3969/j.issn.1672-7029.2016.09.012 [9] 罗丹,冯忠绪,王晓云. 基于刚柔耦合的摊铺机熨平板横向振幅不均匀性研究[J]. 机械科学与技术,2012,31(8): 1290-1294. doi: 10.13433/j.cnki.1003-8728.2012.08.035LUO Dan, FENG Zhongxu, WANG Xiaoyun. Study on the non-uniformity of lateral vibration of asphalt paver screed based on coupled rigid and flexible model[J]. Mechanical Science and Technology for Aerospace Engineering, 2012, 31(8): 1290-1294. doi: 10.13433/j.cnki.1003-8728.2012.08.035 [10] 刘洪海,贾洁,马朝鲜,等. 摊铺机熨平板对混合料振实特性的影响研究[J]. 中国公路学报,2016,29(7): 152-158. doi: 10.3969/j.issn.1001-7372.2016.07.019LIU Honghai, JIA Jie, MA Chaoxian, et al. Investigation of paver screed on compaction characteristics of mixture[J]. China Journal of Highway and Transport, 2016, 29(7): 152-158. doi: 10.3969/j.issn.1001-7372.2016.07.019 [11] JIA J, LIU H H, WAN Y P, et al. Impact of vibration compaction on the paving density and transverse uniformity of hot paving layer[J]. International Journal of Pavement Engineering, 2020, 21(3): 289-303. doi: 10.1080/10298436.2018.1464656 [12] 殷超,张建润,石统蒙,等. 摊铺机振捣机构多重相位对动力学特性影响[J]. 振动与冲击,2018,37(8): 167-171. doi: 10.13465/j.cnki.jvs.2018.08.026YIN Chao, ZHANG Jianrun, SHI Tongmeng, et al. Effects of multiple phases on dynamic characteristics of paver tamper mechanism[J]. Journal of Vibration and Shock, 2018, 37(8): 167-171. doi: 10.13465/j.cnki.jvs.2018.08.026 [13] 卫星,张靖,魏欢博,等. 基于振动响应的高铁声屏障结构体系研究[J]. 西南交通大学学报,2022,57(2): 353-359,409.WEI Xing, ZHANG Jing, WEI Huanbo, et al. Structural effect on mechanical behavior of high-speed railway sound barriers based on vibration response[J]. Journal of Southwest Jiaotong University, 2022, 57(2): 353-359,409. [14] 贾洁,刘洪海,辛强,等. 基于正交试验的摊铺机振捣压实性能影响因素分析[J]. 铁道科学与工程学报,2018,15(5): 1310-1317. doi: 10.3969/j.issn.1672-7029.2018.05.029JIA Jie, LIU Honghai, XIN Qiang, et al. Study on the influence factors of compacting performance of tamper based on orthogonal test[J]. Journal of Railway Science and Engineering, 2018, 15(5): 1310-1317. doi: 10.3969/j.issn.1672-7029.2018.05.029 [15] JIA J, LIU H H, WAN Y P. Dynamic characteristics modelling of the tamper–asphalt mixture interaction: application to predict asphalt mat density[J]. International Journal of Pavement Engineering, 2019, 20(5): 530-543. doi: 10.1080/10298436.2017.1316642 [16] 罗勋, 杨杰, 田红涛, 等. 岩爆隧道冲击荷载作用特征及其计算方法研究[J/OL]. 西南交通大学学报, 2022: 1-9[2022-09-27]. http://kns.cnki.net/kcms/detail/51.1277.u.20220919.1353.004.htmlLUO Xun, YANG Jie, TIAN Hongtao, et al. Research on the characteristics and calculation method of impact load of rockburst tunnel [J/OL]. Journal of Southwest Jiaotong University, 2022: 1-9[2022-09-27]. http://kns.cnki.net/kcms/detail/51.1277.u.20220919.1353.004.html -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 713
- HTML全文浏览量: 358
- PDF下载量: 20
- 被引次数: 0