

Oxygen Supply Concentration and Labor Intensity of High Altitude Tunnel Based on MEC-BP
-
摘要:
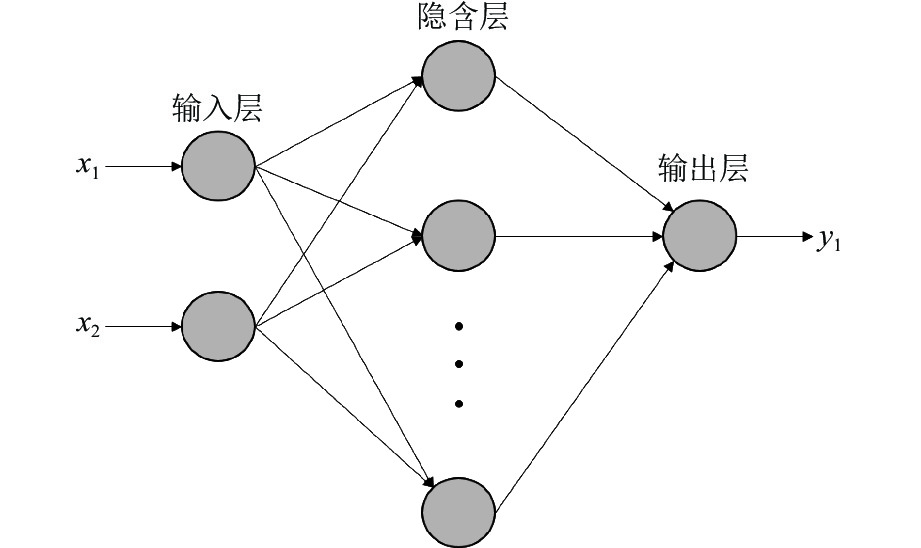
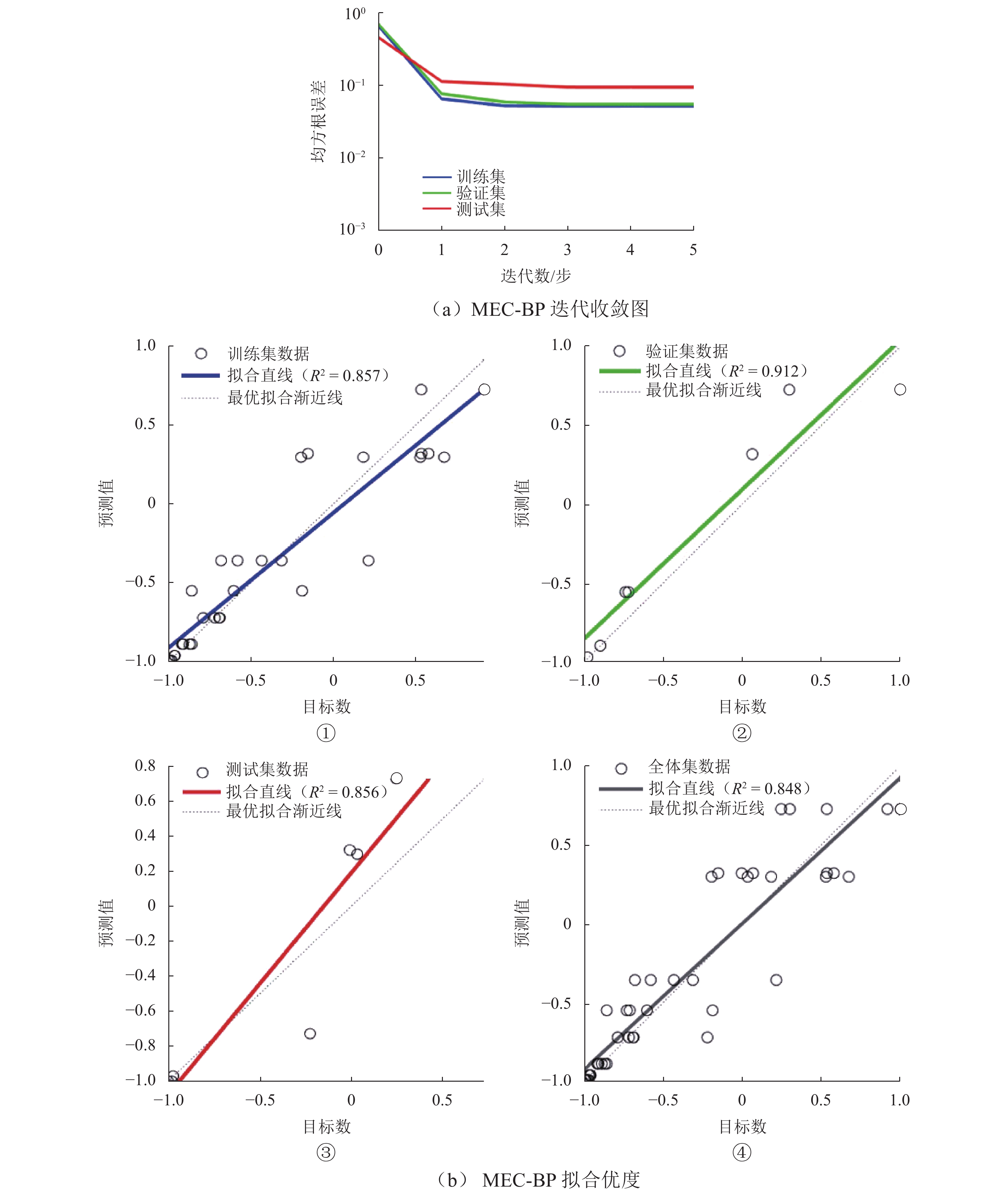
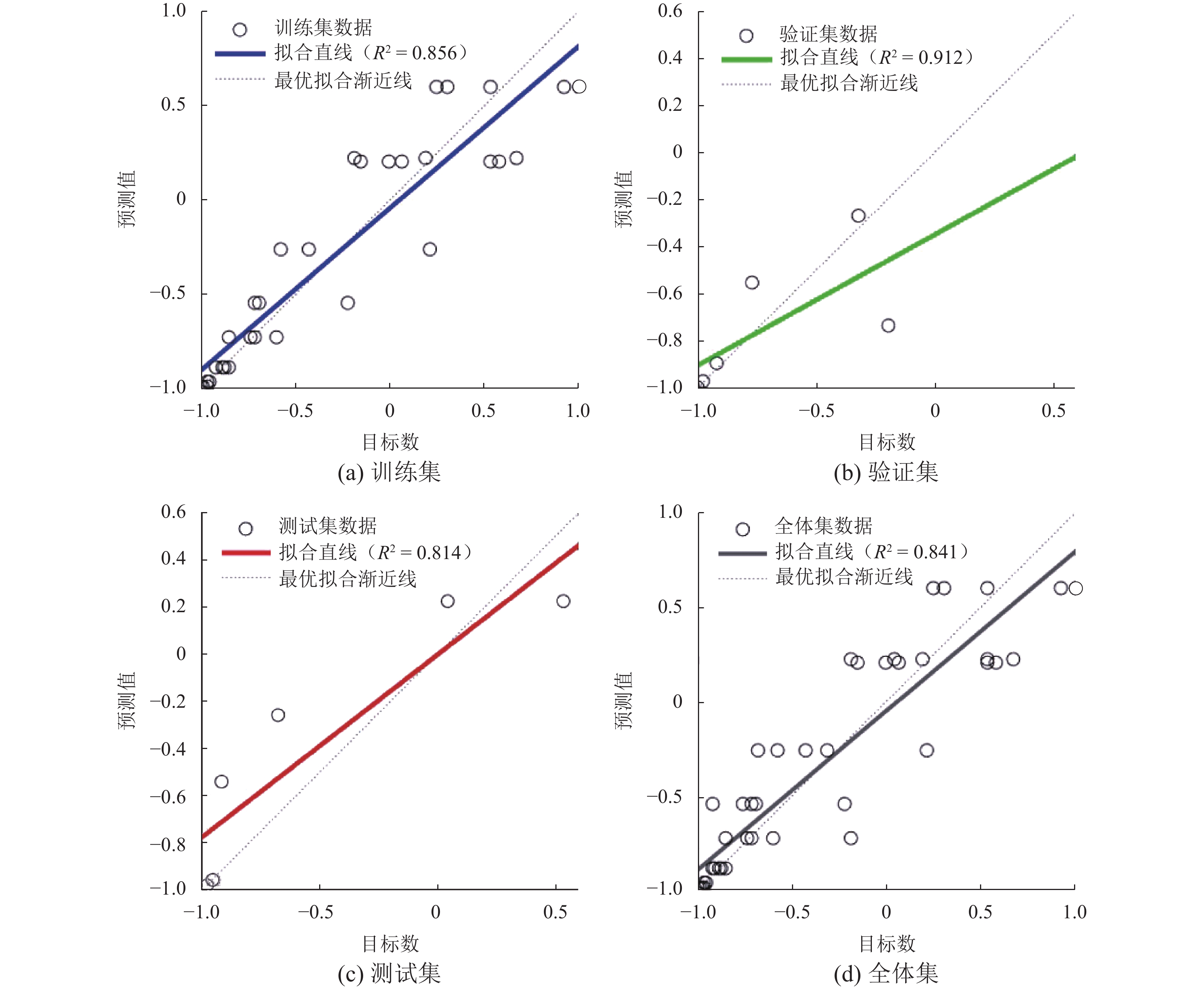
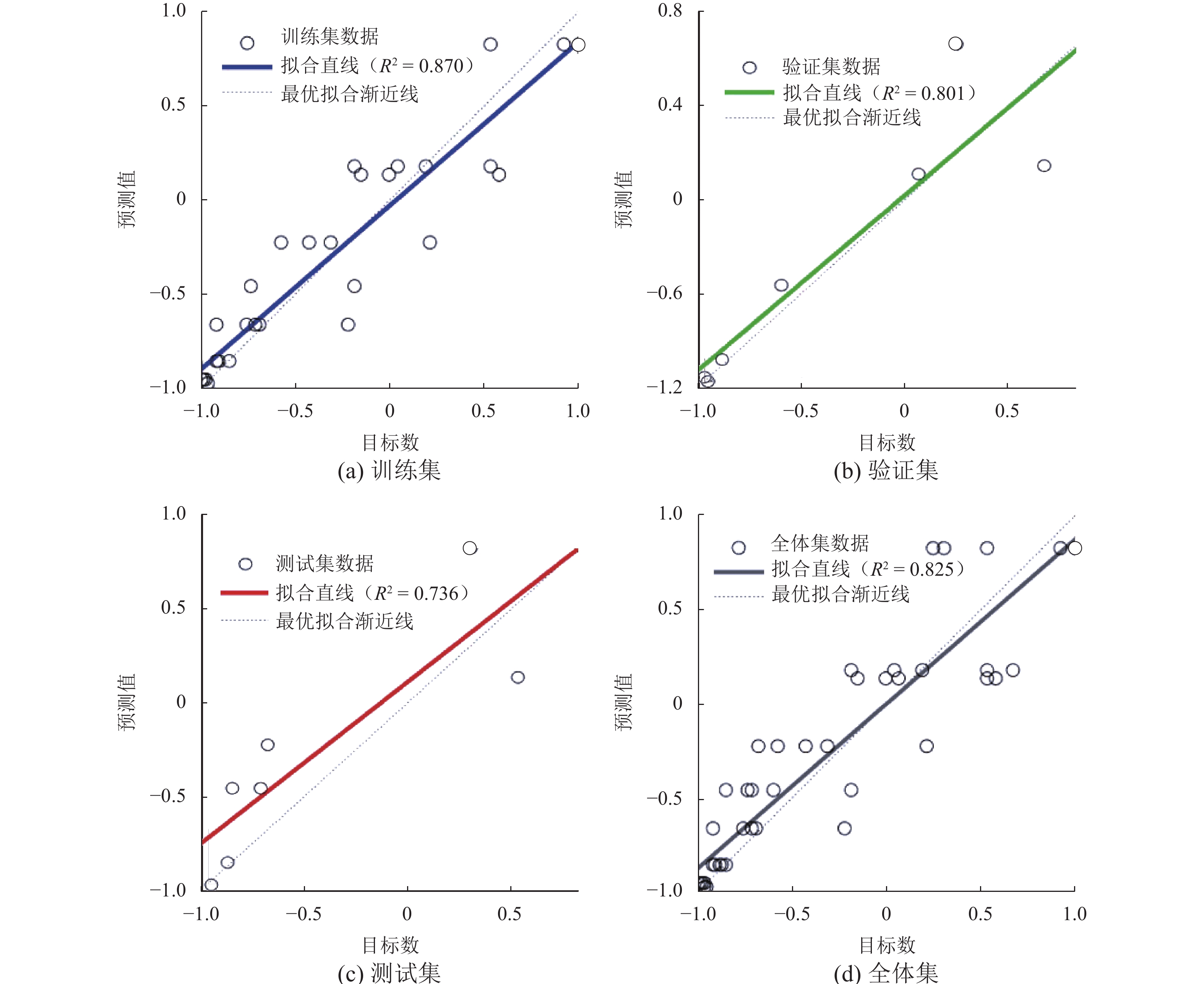
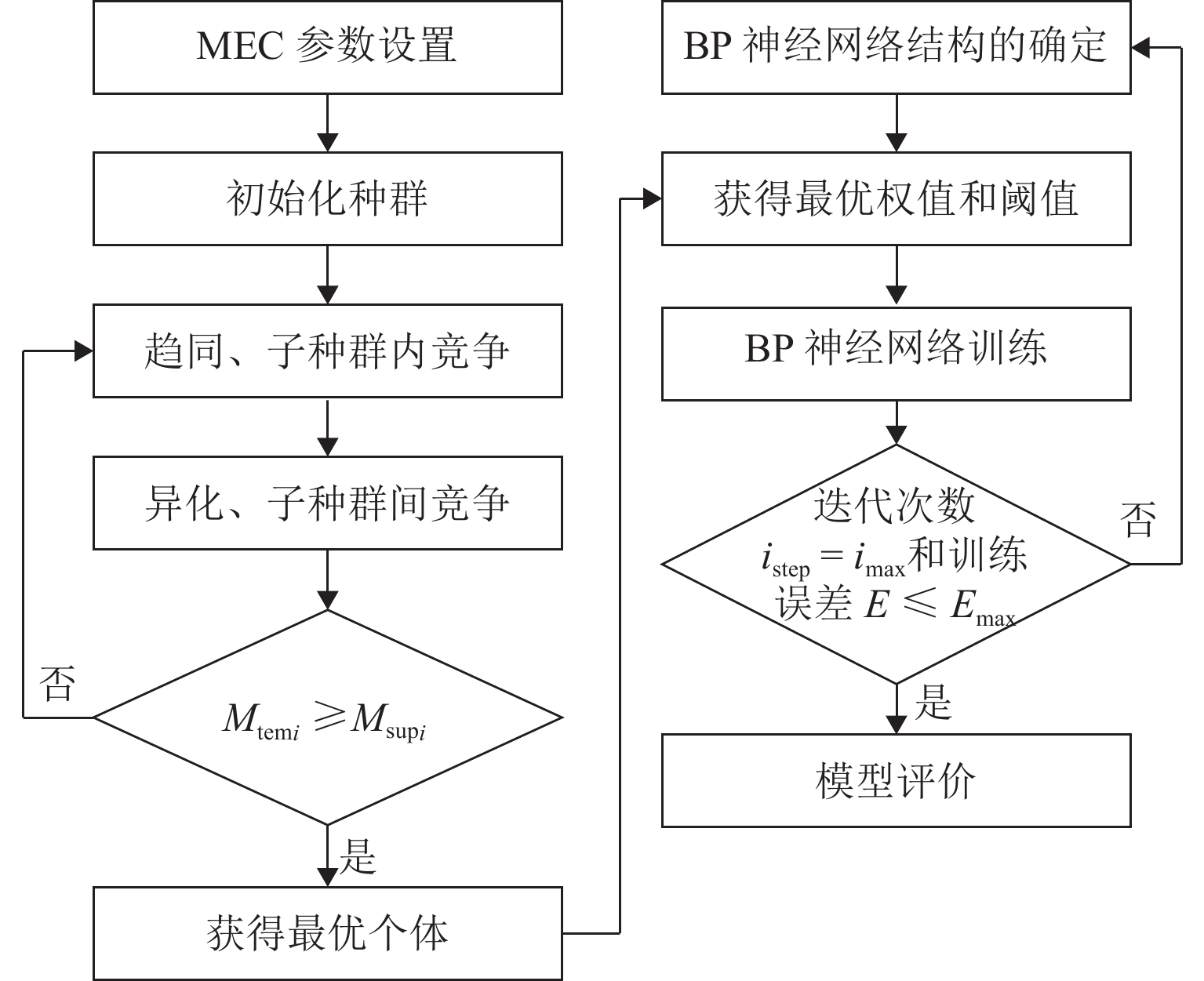
为解决高海拔隧道施工供氧关键技术,开展高海拔隧道供氧浓度及劳动功率对劳动强度的影响研究. 通过在西藏拉萨达孜区的圭嘎拉隧道进行现场实测,以平均能量代谢率作为衡量劳动强度指标,采用肺通气量仪搜集6名测试人员在不同劳动强度(50、75 W和100 W劳动功率)和供氧浓度(20.9%、25.0%和29.0%)下的肺通量数据,并转化为劳动强度指标,运用基于思维进化算法的前馈神经网络(mind evolutionary computation back-propagation, MEC-BP)对劳动强度指标进行拟合. 研究结果表明:MEC-BP神经网络拟合数据的拟合优度略高于GA-BP 和BP 神经网络的拟合优度;50 W低劳动功率下,施工人员平均能量代谢率对氧浓度的变化较小,最大约0.1 kJ/(min•m2);在100 W较高劳动功率下,25%供氧浓度可作为4 200 m高原供氧浓度参考值.
Abstract:In order to solve the key technology of oxygen supply in high-altitude tunnel construction, the influence of oxygen supply concentration and labor power on labor intensity in a high-altitude tunnel is studied. Through field measurement in Guigala Tunnel in Dazi District, Lhasa, Tibet, the average energy metabolic rate is used as the indicator to measure labor intensity. The lung flux data of six testers under different labor intensities (labor power of 50, 75, and 100 W) and oxygen supply concentrations (20.9%, 25.0%, and 29.0%) are collected by using the lung ventilation meter, and the data are then converted into the indicator of labor intensity. The mind evolutionary computation back-propagation (MEC-BP) neural network is used to fit the labor intensity indicator. The results show that the goodness of fit of the MEC-BP neural network is slightly higher than that of GA-BP and BP neural networks. Experimental tests and MEC-BP neural network fitting data show that under low labor power of 50 W, the average energy metabolic rate of construction personnel changes slightly with oxygen concentration, with a maximum value of about 0.1 kJ/(min•m2). Under high labor power of 100 W, an oxygen supply concentration of 25% can be used as the reference value of oxygen supply concentration at the plateau of 4 200 m.
-
Key words:
- tunnel /
- oxygen supply /
- neural networks /
- fitting /
- average energy metabolic rate
-
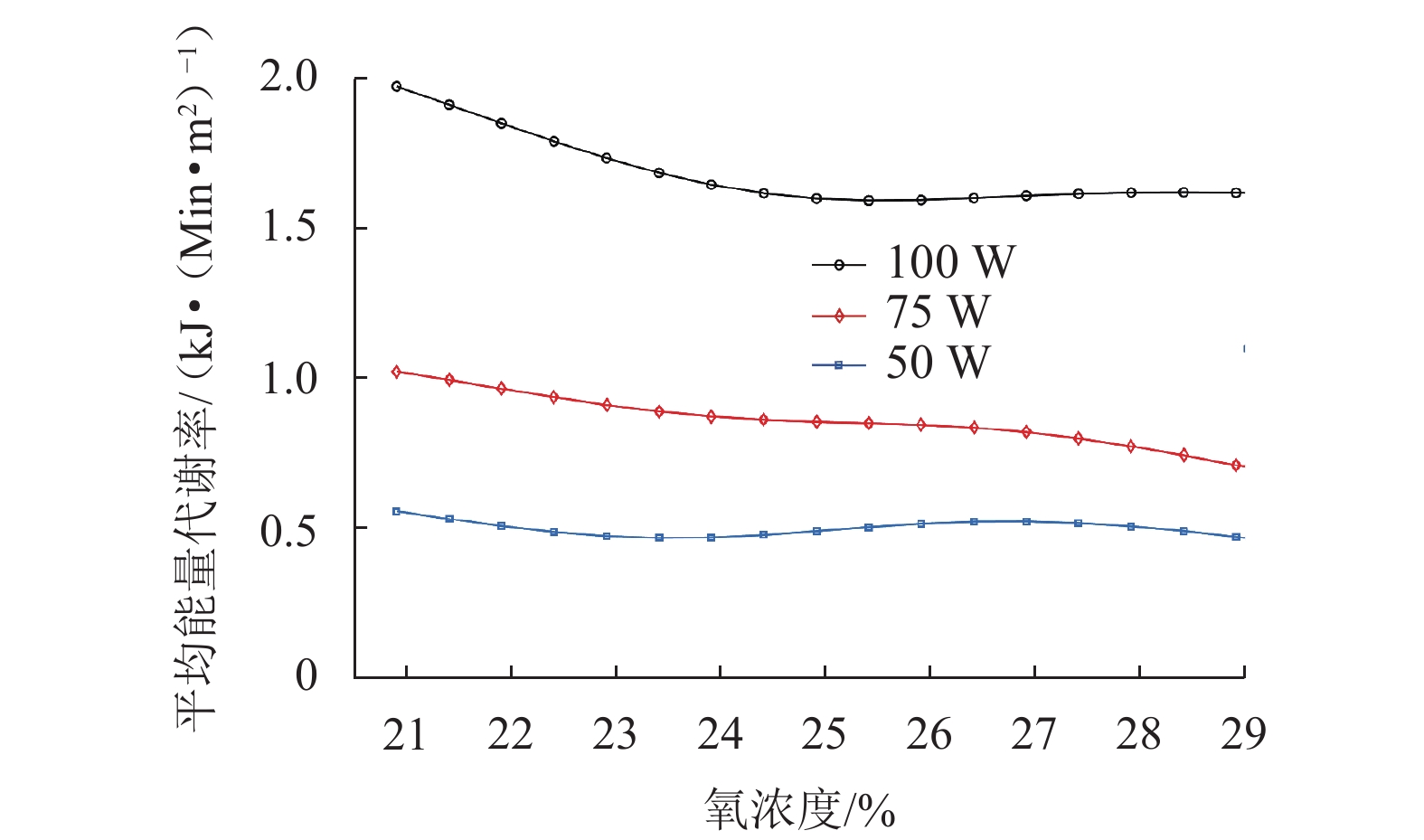
图 7 MEC-BP拟合平均能量代谢率变化
Figure 7. MEC-BP fitting average energy metabolic rate change chart
表 1 现场测试及计算数据
Table 1. Field test and calculation data
测试人员
编号氧浓度/% 功率/W 肺通量/(L·min−1) A/m2 测试环境温度/K 标准肺通气量/
(L·min−1)平均能量代谢率/
(kJ·(min·m2)−1)1 号 20.9 50 10.52 1.86 298.15 5.78 0.57 25.0 50 7.88 1.86 286.15 4.51 0.50 29.0 50 7.29 1.86 284.15 4.20 0.48 20.9 75 20.03 1.86 296.15 11.08 0.96 25.0 75 17.07 1.86 288.15 9.71 0.69 29.0 75 17.02 1.86 290.15 9.61 0.67 20.9 100 32.75 1.86 298.15 18.00 2.21 25.0 100 27.88 1.86 292.15 15.64 1.80 29.0 100 27.94 1.86 292.15 15.67 1.80 2 号 20.9 50 9.75 1.80 299.15 5.34 0.56 25.0 50 7.52 1.80 292.15 4.22 0.49 29.0 50 6.73 1.80 284.15 3.88 0.47 20.9 75 20.45 1.80 298.15 11.24 1.06 25.0 75 18.12 1.80 298.15 9.96 0.81 29.0 75 16.41 1.80 284.15 9.46 0.71 20.9 100 27.54 1.80 298.15 15.13 1.80 25.0 100 23.89 1.80 290.15 13.49 1.50 29.0 100 22.87 1.80 289.15 12.96 1.39 3 号 20.9 50 8.64 1.72 298.15 4.75 0.53 25.0 50 7.39 1.72 291.15 4.16 0.50 29.0 50 6.91 1.72 283.15 4.00 0.49 20.9 75 23.56 1.72 297.15 12.99 1.52 25.0 75 20.45 1.72 298.15 11.24 1.17 29.0 75 19.31 1.72 285.15 11.10 1.14 20.9 100 29.44 1.72 298.15 16.18 2.14 25.0 100 26.56 1.72 289.15 15.05 1.92 29.0 100 25.44 1.72 285.15 14.62 1.84 4 号 20.9 50 10.74 1.85 298.15 5.90 0.59 25.0 50 7.86 1.85 291.15 4.42 0.49 29.0 50 6.66 1.85 282.15 3.87 0.46 20.9 75 18.64 1.85 295.15 10.35 0.83 25.0 75 16.24 1.85 292.15 9.11 0.59 29.0 75 13.52 1.85 284.15 7.80 0.53 20.9 100 25.79 1.85 298.15 14.17 1.55 25.0 100 22.17 1.85 300.15 12.10 1.17 29.0 100 21.25 1.85 283.15 12.30 1.20 5 号 20.9 50 10.22 1.99 298.15 5.62 0.54 25.0 50 8.54 1.99 292.15 4.79 0.49 29.0 50 7.47 1.99 282.15 4.34 0.47 20.9 75 19.39 1.99 298.15 10.66 0.74 25.0 75 18.72 1.99 292.15 10.50 0.71 29.0 75 18.35 1.99 283.15 10.62 0.73 20.9 100 28.27 1.99 298.15 15.54 1.60 25.0 100 25.88 1.99 299.15 14.17 1.37 29.0 100 24.33 1.99 285.15 13.98 1.33 6 号 20.9 50 9.99 1.85 298.15 5.49 0.56 25.0 50 7.35 1.85 291.15 4.14 0.48 29.0 50 6.19 1.85 282.15 3.59 0.45 20.9 75 19.31 1.85 298.15 10.61 0.88 25.0 75 19.17 1.85 294.15 10.68 0.89 29.0 75 18.84 1.85 292.15 10.57 0.87 20.9 100 27.5 1.85 300.15 15.01 1.70 25.0 100 26.09 1.85 299.15 14.29 1.57 29.0 100 25.13 1.85 289.15 14.24 1.56  下载: 导出CSV
下载: 导出CSV
-
[1] GUO C, XU J F, WANG M N, et al. Study on oxygen supply standard for physical health of construction personnel of high-altitude tunnels[J]. International Journal of Environmental Research and Public Health, 2016, 13(1): 64. [2] 郭春,陈小峰,郑鑫,等. 西藏S5线拉萨至泽当快速路圭嘎拉隧道施工供氧方案研究[J]. 现代隧道技术,2018,55(增2): 331-336.GUO Chun, CHEN Xiaofeng, ZHENG Xin, et al. Oxygen supply scheme for the construction of Guigala tunnel from Tibet S5 line Lhasa to Zedang expressway[J]. Modern Tunnelling Technology, 2018, 55(S2): 331-336. [3] 孙志涛. 基于肺泡氧分压的高海拔隧道施工供氧技术研究[D]. 成都: 西南交通大学, 2016. [4] 王明年,李琦,于丽,等. 高海拔隧道通风、供氧、防灾与节能技术的发展[J]. 隧道建设,2017,37(10): 1209-1216.WANG Mingnian, LI Qi, YU Li, et al. Development of new technologies for ventilation, oxygen supply, disaster prevention and energy saving for high-altitude tunnels[J]. Tunnel Construction, 2017, 37(10): 1209-1216. [5] WANG M N, YAN G F, YU L, et al. Effects of different artificial oxygen-supply systems on migrants’ physical and psychological reactions in high-altitude tunnel construction[J]. Building and Environment, 2019, 149: 458-467. doi: 10.1016/j.buildenv.2018.12.032 [6] 谢文强. 巴朗山高海拔隧道施工期供氧标准及设计方法研究[D]. 成都: 西南交通大学, 2015. [7] 严涛, 王明年, 郭春, 等. 高海拔特长公路隧道弥散式供氧关键技术研究[J]. 现代隧道技术, 2015, 52(2): 180-185, 204.YAN Tao, WANG Mingnian, GUO Chun, et al. Key techniques for the diffused oxygen supply of an extra-long highway tunnel in a high-altitude area[J]. Modern Tunnelling Technology, 2015, 52(2): 180-185, 204. [8] 刘亚丽,李英娜,李川. 基于遗传算法优化BP神经网络的线损计算研究[J]. 计算机应用与软件,2019,36(3): 72-75.LIU Yali, LI Yingna, LI Chuan. Line loss calculation of optimized BP neural network based on genetic algorithm[J]. Computer Applications and Software, 2019, 36(3): 72-75. [9] 任谢楠. 基于遗传算法的BP神经网络的优化研究及MATLAB仿真[D]. 天津: 天津师范大学, 2014. [10] 刘春艳,凌建春,寇林元,等. GA-BP神经网络与BP神经网络性能比较[J]. 中国卫生统计,2013,30(2): 173-176,181.LIU Chunyan, LING Jianchun, KOU Linyuan, et al. Performance comparison between GA-BP neural network and BP neural network[J]. Chinese Journal of Health Statistics, 2013, 30(2): 173-176,181. [11] WANG X D, MIAO C Q, WANG X M. Prediction analysis of deflection in the construction of composite box-girder bridge with corrugated steel webs based on MEC-BP neural networks[J]. Structures, 2021, 32: 691-700. doi: 10.1016/j.istruc.2021.03.011 [12] 李步遥,司马军. 基于MEC-BP神经网络的基坑水平位移反演分析[J]. 铁道科学与工程学报,2021,18(7): 1764-1772.LI Buyao, SIMA Jun. Horizontal displacement back-analysis for deep excavation using MEC-BP neural network[J]. Journal of Railway Science and Engineering, 2021, 18(7): 1764-1772. [13] 王春晓,陈志坚. 基于MEC-BP神经网络的群桩轴力预测[J]. 中国煤炭地质,2017,29(3): 53-57. doi: 10.3969/j.issn.1674-1803.2017.03.11WANG Chunxiao, CHEN Zhijian. Pile group axial force prediction based on MEC-BP neural network[J]. Coal Geology of China, 2017, 29(3): 53-57. doi: 10.3969/j.issn.1674-1803.2017.03.11 [14] 刘应书, 祝显强, 杨雄, 等. 高原低气压环境富氧防火安全研究[C]//青藏铁路运营十周年学术研讨会论文集. 北京: 中国铁道出版社, 2016: 140-146. [15] 王万梁. 单项体力劳动强度分级研究[D]. 济南: 山东大学, 2007. [16] 中华人民共和国卫生部. 工作场所物理因素测量 第10部分: 体力劳动强度分级: GBZ/T 189.10—2007[S]. 北京: 人民出版社, 2007. -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 537
- HTML全文浏览量: 277
- PDF下载量: 29
- 被引次数: 0