

Safety Design of Level Crossing Control System Based on Formal Method
-
摘要:
铁路平交道口控制系统是一种典型的安全苛求系统,为提高铁路平交道口的安全性,提出一个能适应双线双向接车的自动控制系统. 首先,分析现有铁路平交道口的作业流程,利用新的控制系统解决现有系统中常见的三个问题,即出清检查、制动距离限制、连续接车中防护门短时间开放问题;其次,基于Event-B语言以及精化策略对设计的自动控制系统建立形式化模型;最后,检查证明义务以验证需求属性是否被满足,并应用动画器Animation展示系统功能的正确性. 结果显示:相比传统的道口管理系统,本文提出的自动控制系统增加了双线连续接车功能,且使用形式化建模和验证,避免系统设计中存在的二义性,对平交道口安全管理有一定的参考意义.
Abstract:Railway level crossing (RLC) control system is a typical safety-critical system. A novel automatic control system (ACS) that responds to a two-track bi-direction operation is proposed to improve the safety of RLC. Firstly, the operational processes at traditional railway level crossings is analyzed, and the corresponding solutions are proposed in the ACS for three general problems, i.e., clearing inspection, braking distance limitation, and short-time opening of the barriers during continuous work. Secondly, a formal model based on the Event-B language and refinement strategy are developed for the proposed ACS. Finally, proof obligations are checked to verify that the required properties are satisfied, and the Animation is applied to demonstrate the correctness of the system functionality. The results reveal that, compared with the traditional level-crossing management system, the proposed ACS adds the function of two tracks of continuous work, and the use of formal modeling and verification avoids the ambiguity in the system design, all of which have reference significance for RLC safety management.
-
Key words:
- level crossing /
- control system /
- requirement specification /
- safety-critical system /
- formal method
-
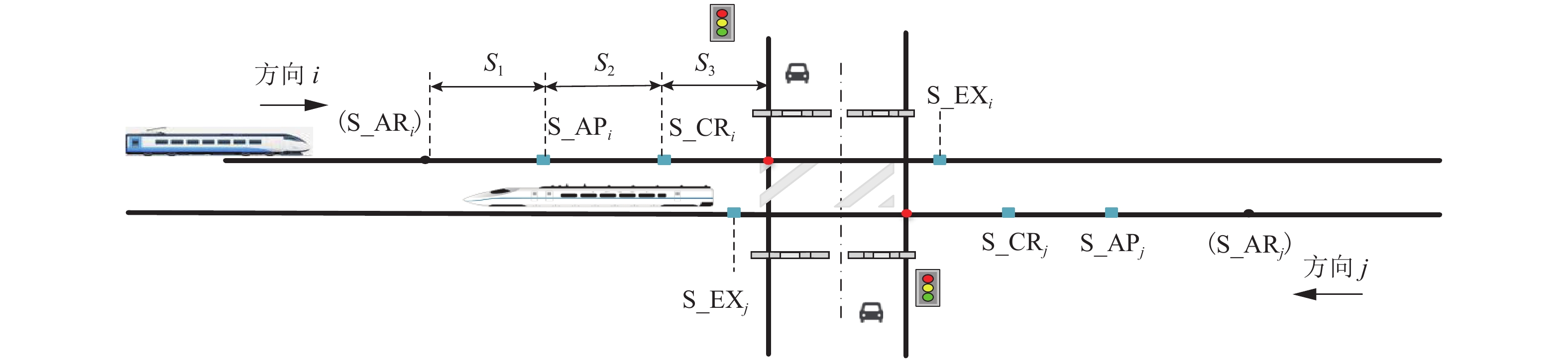
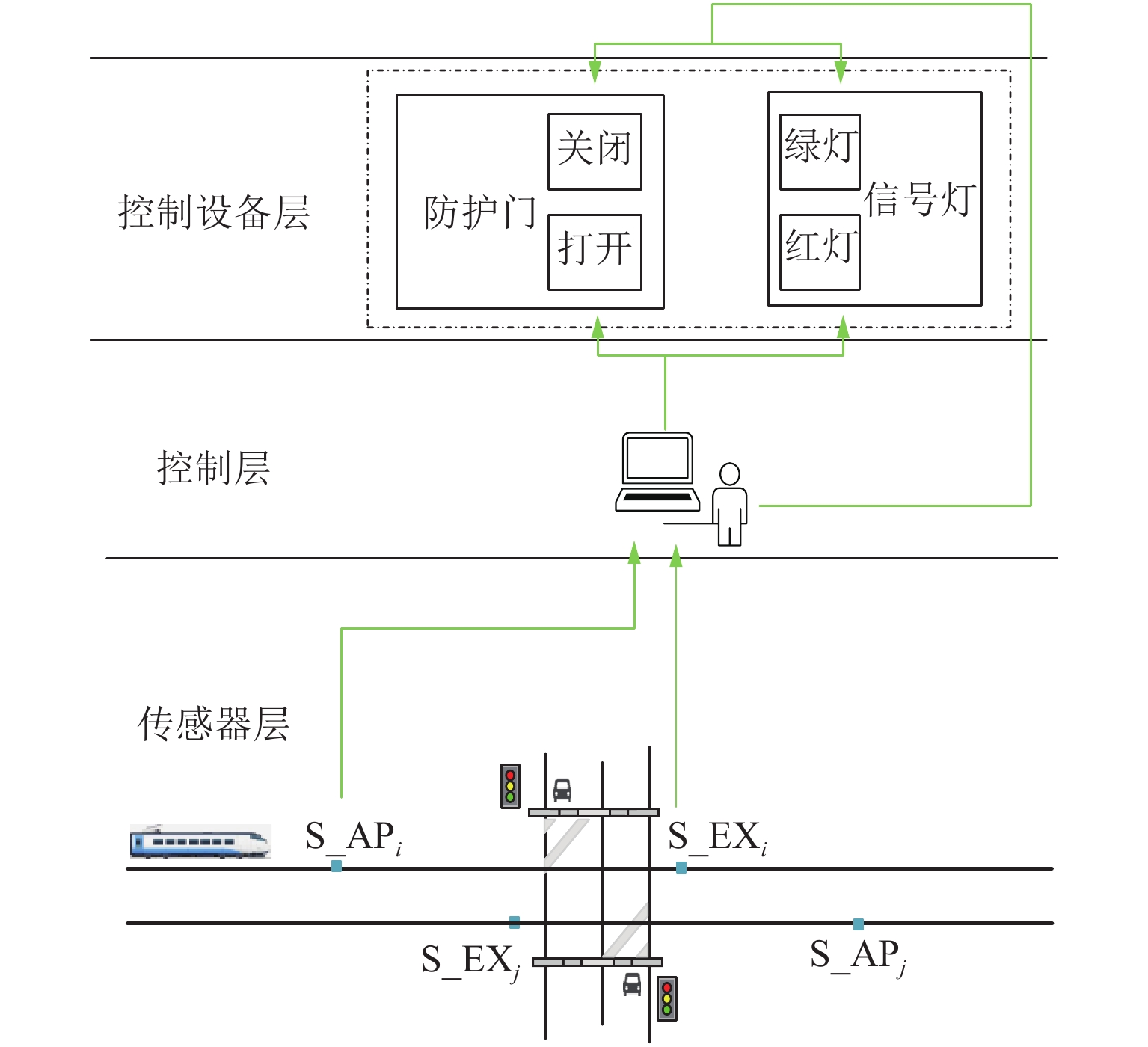
图 3 双线双向道口传感器设置示意
Figure 3. Schematic of sensor setting for double track bi-direction RLC
-
[1] LIU B S, GHAZEL M, TOGUYÉNI A. Model-based diagnosis of multi-track level crossing plants[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(2): 546-556. doi: 10.1109/TITS.2015.2478910 [2] JONSSON L, BJÖRKLUND G, ISACSSON G. Marginal costs for railway level crossing accidents in Sweden[J]. Transport Policy, 2019, 83: 68-79. doi: 10.1016/j.tranpol.2019.09.004 [3] GHAZEL M, EL-KOURSI E M. Two-half-barrier level crossings versus four-half-barrier level crossings: a comparative risk analysis study[J]. IEEE Transactions on Intelligent Transportation Systems, 2014, 15(3): 1123-1133. doi: 10.1109/TITS.2013.2294874 [4] 曹源,唐涛,罗丹,等. 列车运行控制系统设计正确性的验证方法[J]. 西南交通大学学报,2010,45(4): 86-91. doi: 10.3969/j.issn.0258-2724.2010.04.015CAO Yuan, TANG Tao, LUO Dan, et al. Method for verifying the correctness of train control system design[J]. Journal of Southwest Jiaotong University, 2010, 45(4): 86-91. doi: 10.3969/j.issn.0258-2724.2010.04.015 [5] MEKKI A, GHAZEL M, TOGUYENI A. Validation of a new functional design of automatic protection systems at level crossings with model-checking techniques[J]. IEEE Transactions on Intelligent Transportation Systems, 2012, 13(2): 714-723. doi: 10.1109/TITS.2011.2178238 [6] 王恪铭,王峥. 基于形式化方法的道口控制系统规范建模与验证[J]. 西南交通大学学报,2019,54(3): 573-578,603.WANG Keming, WANG Zheng. Modeling and verification of control system specification for railway level crossings based on formal method[J]. Journal of Southwest Jiaotong University, 2019, 54(3): 573-578,603. [7] 王霞,刘宁,王恪铭. 道口管理系统多参数的形式化建模与验证[J]. 综合运输,2019,41(2): 65-72.WANG Xia, LIU Ning, WANG Keming. Formal modeling and verification of multi-parameter model of level crossing management system[J]. China Transportation Review, 2019, 41(2): 65-72. [8] ABRIAL J R. Modeling in Event-B: system and software engineering [M]. Cambridge: Cambridge University Press, 2010 [9] 王恪铭,王霞,程鹏,等. 车站联锁系统行为验证与数据确认的形式化方法[J]. 西南交通大学学报,2021,56(3): 587-593,613.WANG Keming, WANG Xia, CHENG Peng, et al. Formal method for behavior verification and data validation of station interlocking system[J]. Journal of Southwest Jiaotong University, 2021, 56(3): 587-593,613. [10] 柏卓彤,柏赟,李佳杰,等. 基于制动距离表的高速铁路ATP常用制动曲线研究[J]. 铁道标准设计,2018,62(11): 139-143,149. doi: 10.13238/j.issn.1004-2954.201712310002BAI Zhuotong, BAI Yun, LI Jiajie, et al. The research on automatic train protection service braking curve based on braking distance table[J]. Railway Standard Design, 2018, 62(11): 139-143,149. doi: 10.13238/j.issn.1004-2954.201712310002 [11] BÖRGER E. The ASM refinement method[J]. Formal Aspects of Computing, 2003, 15(2/3): 237-257. -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 749
- HTML全文浏览量: 446
- PDF下载量: 38
- 被引次数: 0