

Mechanical Characteristics of Super-Long-Span Cable-Stayed Bridge with Transverse Asymmetrical Load
-
摘要:
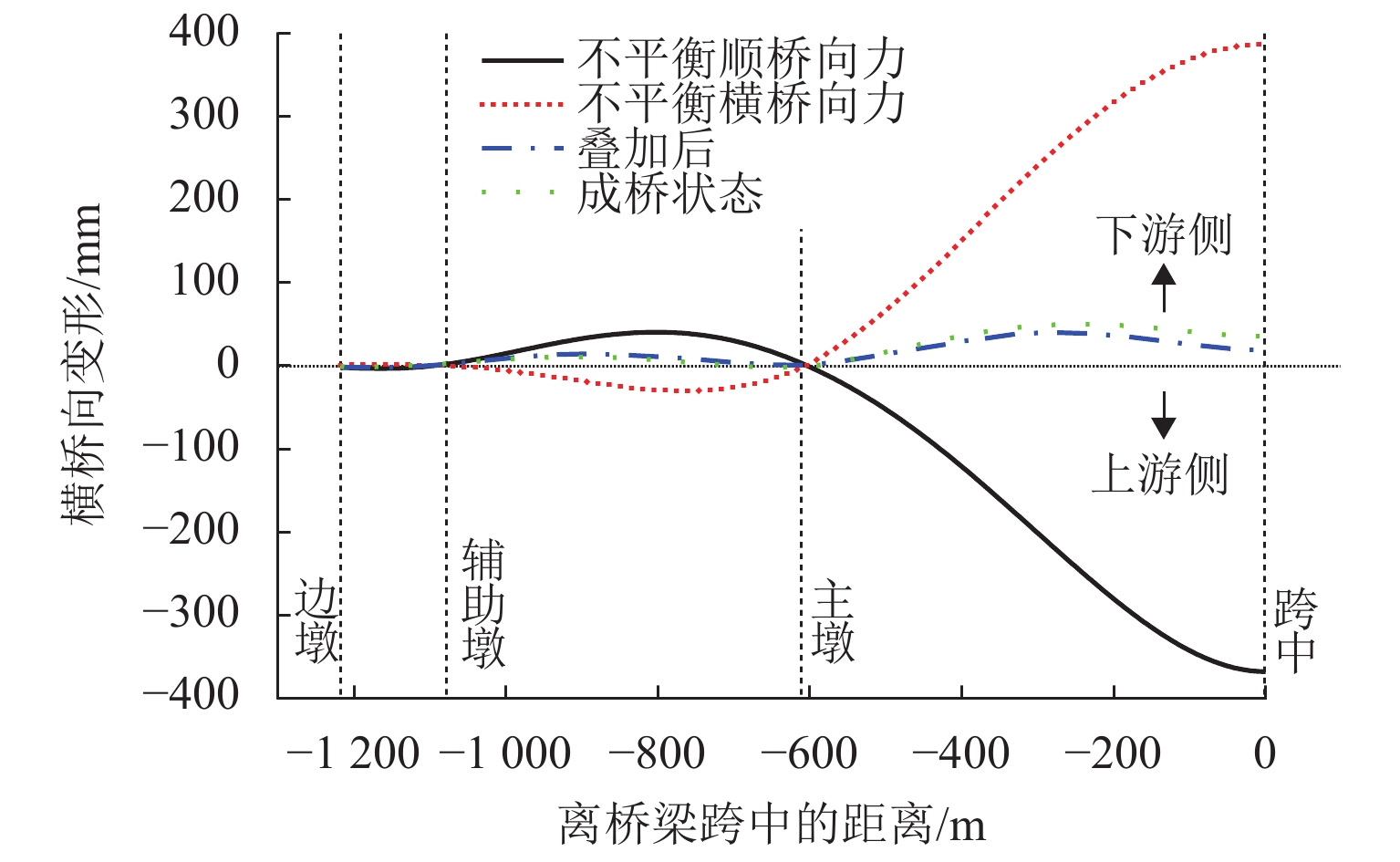
为研究横桥向非对称恒载对大跨度斜拉桥受力行为的影响,以常泰长江大桥为工程背景,对横桥向非对称恒载桥梁结构的力学行为进行分析,并提出了合理的控制措施以实现理想的成桥状态. 提出了一种索力快速优化的方法,采用上下游索力不对称和降低铁路二期恒载的措施解决横桥向不对称恒载引起的主梁扭转、主塔偏位问题,实现了合理的成桥状态. 结果表明:通过上下游索力不对称可以有效地控制主梁扭转,斜拉索顺桥向不平衡分力和横桥向不平衡分力产生的横桥向弯曲变形大小基本一致,方向相反,有利于降低主梁横桥向弯曲变形;通过减小横桥向不对称恒载的差值可以有效地控制主塔横桥向偏位.
Abstract:In order to study the influence of transverse asymmetrical load on the mechanical characteristics of long-span cable-stayed bridges, this paper takes the Changtai Yangtze River Bridge as the engineering background and analyzes the mechanical characteristics of the bridge with a transverse asymmetrical load. In addition, reasonable control measures are put forward to realize the ideal state of the final bridge. Firstly, a fast optimization method of the cable force is proposed for the cable-stayed bridge with a transverse asymmetrical load. Secondly, asymmetrical upstream and downstream cable forces are used to control the main girder torsion caused by the transverse asymmetrical load. The influences of the unbalanced components along the cable-stayed bridge and the transverse direction of the bridge on the alignment of the main girder and the deviation of the main tower are analyzed. Finally, the method of reducing the secondary dead load of the railway is used to control the deviation of the main tower caused by the transverse asymmetrical load. The results show that the main girder torsion can be effectively controlled by the asymmetrical upstream and downstream cable forces. The transverse bending deformations generated by the unbalanced components along the cable-stayed bridge and the transverse direction of the bridge are basically consistent but opposite in direction, which is beneficial to reduce the transverse bending deformations of the main girder. The transverse deviation of the main tower can be effectively controlled by reducing the difference of the transverse asymmetrical load.
-

图 2 主梁横桥向布置方案(单位:cm)
Figure 2. Configuration schemes of main girder cross section (unit:cm)
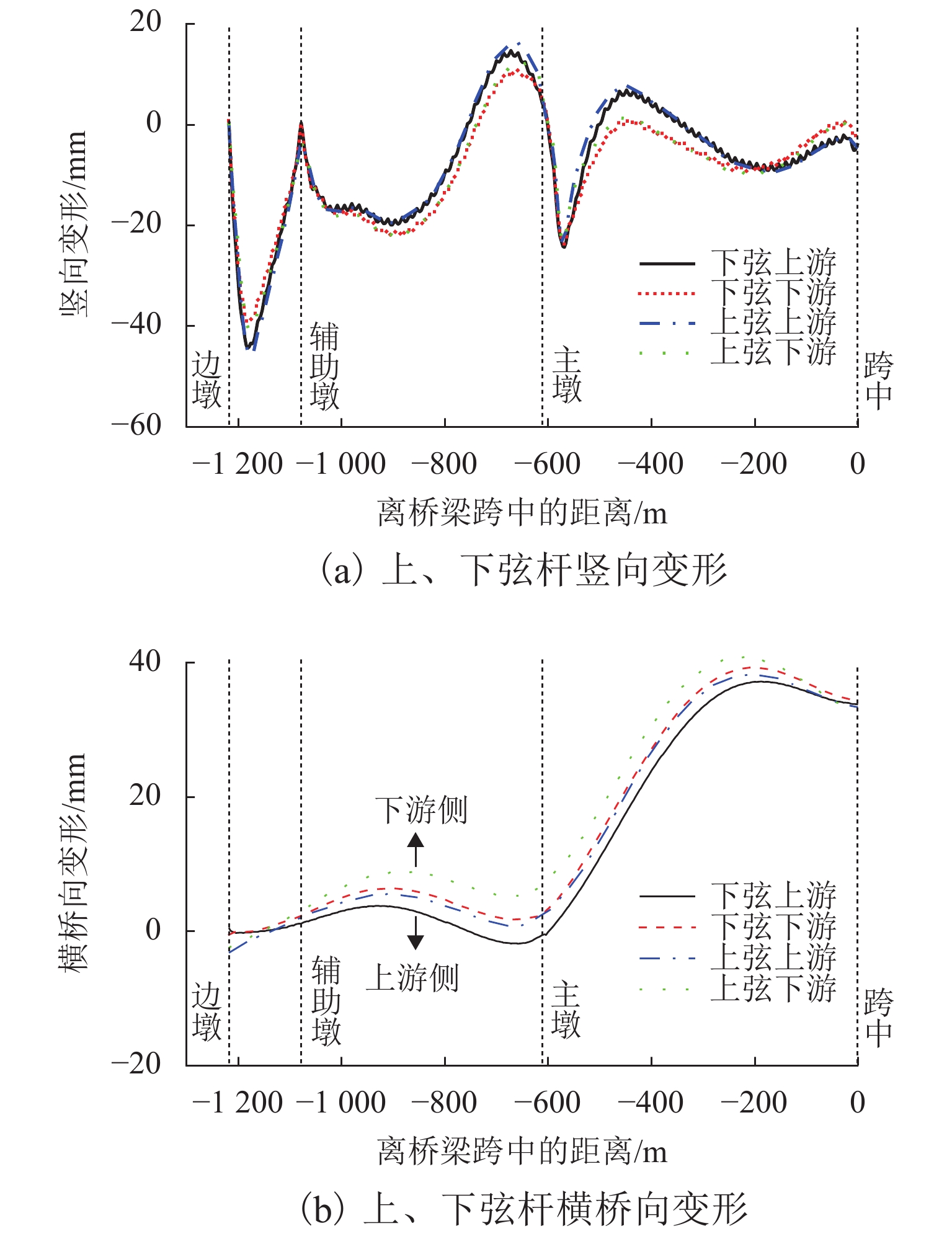
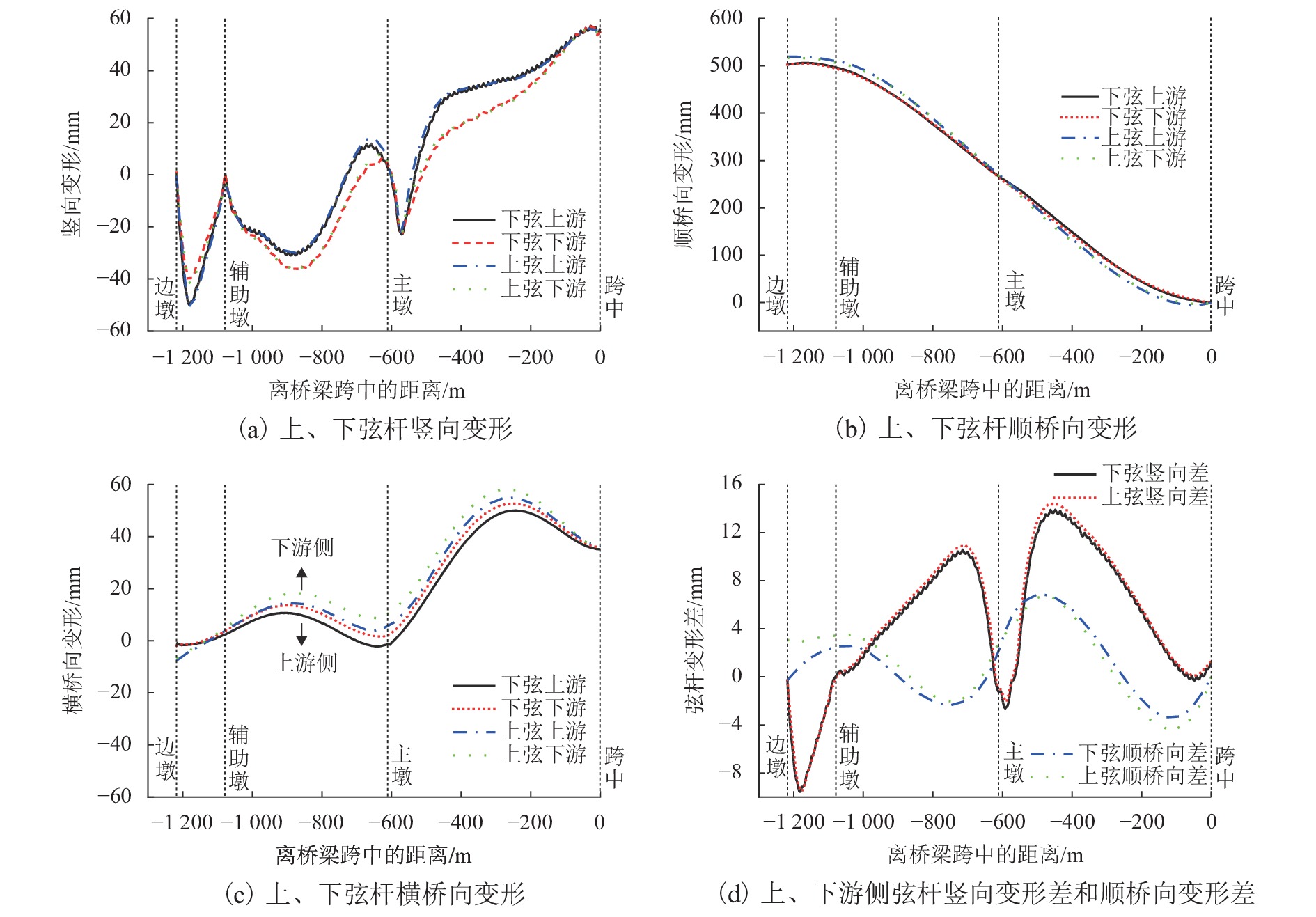
图 9 优化后成桥状态主梁弦杆变形
Figure 9. Deformations of main girder chords in bridge state after optimization
表 1 主塔塔顶变形
Table 1. Deformations of the top of the main tower
mm 不计入收缩徐变效应 计入收缩徐变效应 顺桥向变形 横桥向变形 顺桥向变形 横桥向变形 −104.6 −88.1 −100.9 −125.2  下载: 导出CSV
下载: 导出CSV
表 2 降低铁路侧恒载措施
Table 2. Measures to reduce secondary dead load of the railway
措施 优化前 优化后 降低铺砟厚度 35 cm 厚普通
道床25 cm 厚聚氨酯固化道床 压缩道床宽度 9 m 8.2 m 调整铁路防水面板结构 6 cm 厚高性能混凝土铺装 3 mm 不锈钢与基材形成复合钢板 斜拉索 不同规格、相同
强度同种规格、不同
强度
下载: 导出CSV
-
[1] 秦顺全. 武汉天兴洲公铁两用长江大桥关键技术研究[J]. 工程力学,2008,25(增2): 99-105.QIN Shunquan. Key technology of Tianxingzhou Yangtze River Bridge[J]. Engineering Mechanics, 2008, 25(S2): 99-105. [2] 高宗余. 沪通长江大桥主桥技术特点[J]. 桥梁建设,2014,44(2): 1-5.GAO Zongyu. Technical characteristics of main bridge of Hutong Changjiang River Bridge[J]. Bridge Construction, 2014, 44(2): 1-5. [3] 秦顺全,徐伟,陆勤丰,等. 常泰长江大桥主航道桥总体设计与方案构思[J]. 桥梁建设,2020,50(3): 1-10. doi: 10.3969/j.issn.1003-4722.2020.03.001QIN Shunquan, XU Wei, LU Qinfeng, et al. Overall design and concept development for main navigational channel bridge of Changtai Changjiang River Bridge[J]. Bridge Construction, 2020, 50(3): 1-10. doi: 10.3969/j.issn.1003-4722.2020.03.001 [4] 秦顺全. 分阶段成形结构过程控制的无应力状态控制法[J]. 中国工程科学,2009,11(10): 72-78. doi: 10.3969/j.issn.1009-1742.2009.10.011QIN Shunquan. Unstressed state control method for process control of structure formed by stages[J]. Strategic Study of CAE, 2009, 11(10): 72-78. doi: 10.3969/j.issn.1009-1742.2009.10.011 [5] QIN S Q, WEI K, QIN J X, et al. Stress-free-state based structural analysis and construction control theory for staged construction bridges[J]. Advances in Bridge Engineering, 2020, 1(1): 1-16. doi: 10.1186/s43251-020-00001-y [6] QIN S Q, QIN J X, ZHANG D. Equilibrium equation for spatial frame structure constructed in stages and its applications[C]//IABSE Symposium Report. [S.L.]: International Association for Bridge and Structural Engineering, 2013: 1-8. [7] 但启联,秦顺全,魏凯,等. 基于平面梁单元的分阶段成形结构线形控制方程[J]. 桥梁建设,2017,47(4): 42-47. doi: 10.3969/j.issn.1003-4722.2017.04.008DAN Qilian, QIN Shunquan, WEI Kai, et al. Equation for geometric shape control of structure formed in stages based on plane beam elements[J]. Bridge Construction, 2017, 47(4): 42-47. doi: 10.3969/j.issn.1003-4722.2017.04.008 [8] 许磊平,秦顺全,马润平. 基于平面壳单元的分阶段成形结构平衡方程[J]. 西南交通大学学报,2013,48(5): 857-862. doi: 10.3969/j.issn.0258-2724.2013.05.012XU Leiping, QIN Shunquan, MA Runping. Equilibrium equation derivation of structures formed by stages based on plane shell element[J]. Journal of Southwest Jiaotong University, 2013, 48(5): 857-862. doi: 10.3969/j.issn.0258-2724.2013.05.012 [9] 许磊平,秦顺全,苑仁安. 基于Timoshenko梁的分阶段成形结构平衡方程[J]. 桥梁建设,2015,45(5): 24-29.XU Leiping, QIN Shunquan, YUAN Renan. Equilibrium equation for structure formed in stages based on Timoshenko beam[J]. Bridge Construction, 2015, 45(5): 24-29. [10] 苑仁安,秦顺全,王帆. 分阶段成形杆系结构几何非线性平衡方程[J]. 桥梁建设,2014,44(2): 50-55.YUAN Renan, QIN Shunquan, WANG Fan. Equilibrium equation for geometric nonlinearity of frame structure formed in stages[J]. Bridge Construction, 2014, 44(2): 50-55. [11] 苑仁安,秦顺全,王帆,等. 基于平面梁单元的几何非线性分阶段成形平衡方程[J]. 桥梁建设,2014,44(4): 45-49.YUAN Ren’an, QIN Shunquan, WANG Fan, et al. Equilibrium equation for geometric nonlinearity of structure formed in stages based on plane beam elements[J]. Bridge Construction, 2014, 44(4): 45-49. [12] 苑仁安,秦顺全,肖海珠. 一种斜拉桥目标状态索力快速精准确定的方法[J]. 桥梁建设,2020,50(2): 25-30. doi: 10.3969/j.issn.1003-4722.2020.02.005YUAN Renan, QIN Shunquan, XIAO Haizhu. A method to rapidly and accurately determine target cable forces for cable-stayed bridge[J]. Bridge Construction, 2020, 50(2): 25-30. doi: 10.3969/j.issn.1003-4722.2020.02.005 [13] 张清华,黄灿,卜一之,等. 大跨度钢斜拉桥制造误差的传播及其效应特性[J]. 西南交通大学学报,2015,50(5): 830-837. doi: 10.3969/j.issn.0258-2724.2015.05.010ZHANG Qinghua, HUANG Can, BU Yizhi, et al. Fabrication error propagation properties of key components of large-span cable-stayed bridges with steel box girder[J]. Journal of Southwest Jiaotong University, 2015, 50(5): 830-837. doi: 10.3969/j.issn.0258-2724.2015.05.010 [14] 谢明志,杨永清,卜一之,等. 千米级混合梁斜拉桥双目标控制施工监控体系[J]. 西南交通大学学报,2018,53(2): 244-252,321. doi: 10.3969/j.issn.0258-2724.2018.02.004XIE Mingzhi, YANG Yongqing, BU Yizhi, et al. Construction control system for thousand-meter-scale hybrid girder cable-stayed bridge based on double target control[J]. Journal of Southwest Jiaotong University, 2018, 53(2): 244-252,321. doi: 10.3969/j.issn.0258-2724.2018.02.004 -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 689
- HTML全文浏览量: 325
- PDF下载量: 58
- 被引次数: 0