

Digital Twin Evolution Model and Its Applications in Intelligent Manufacturing
-
摘要:
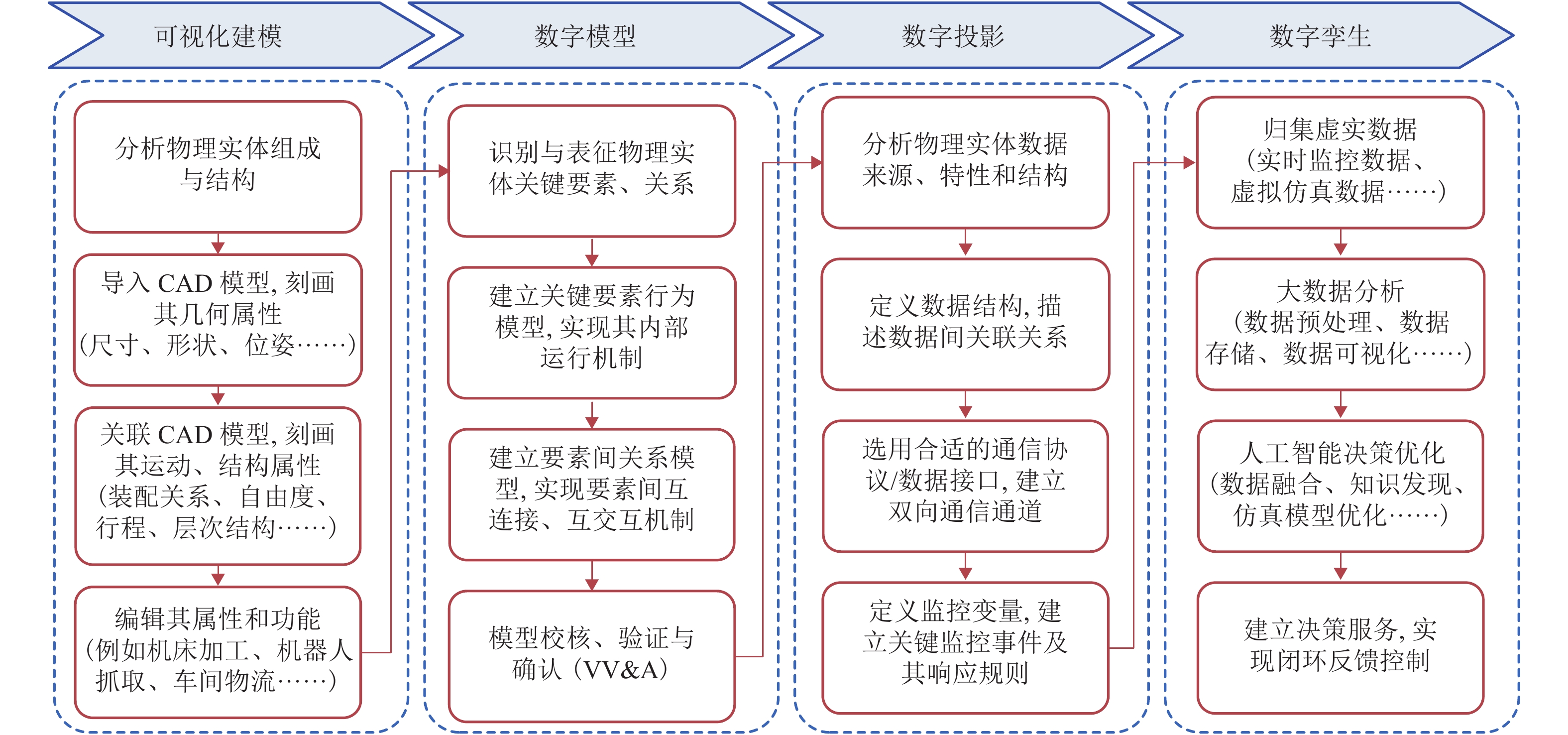
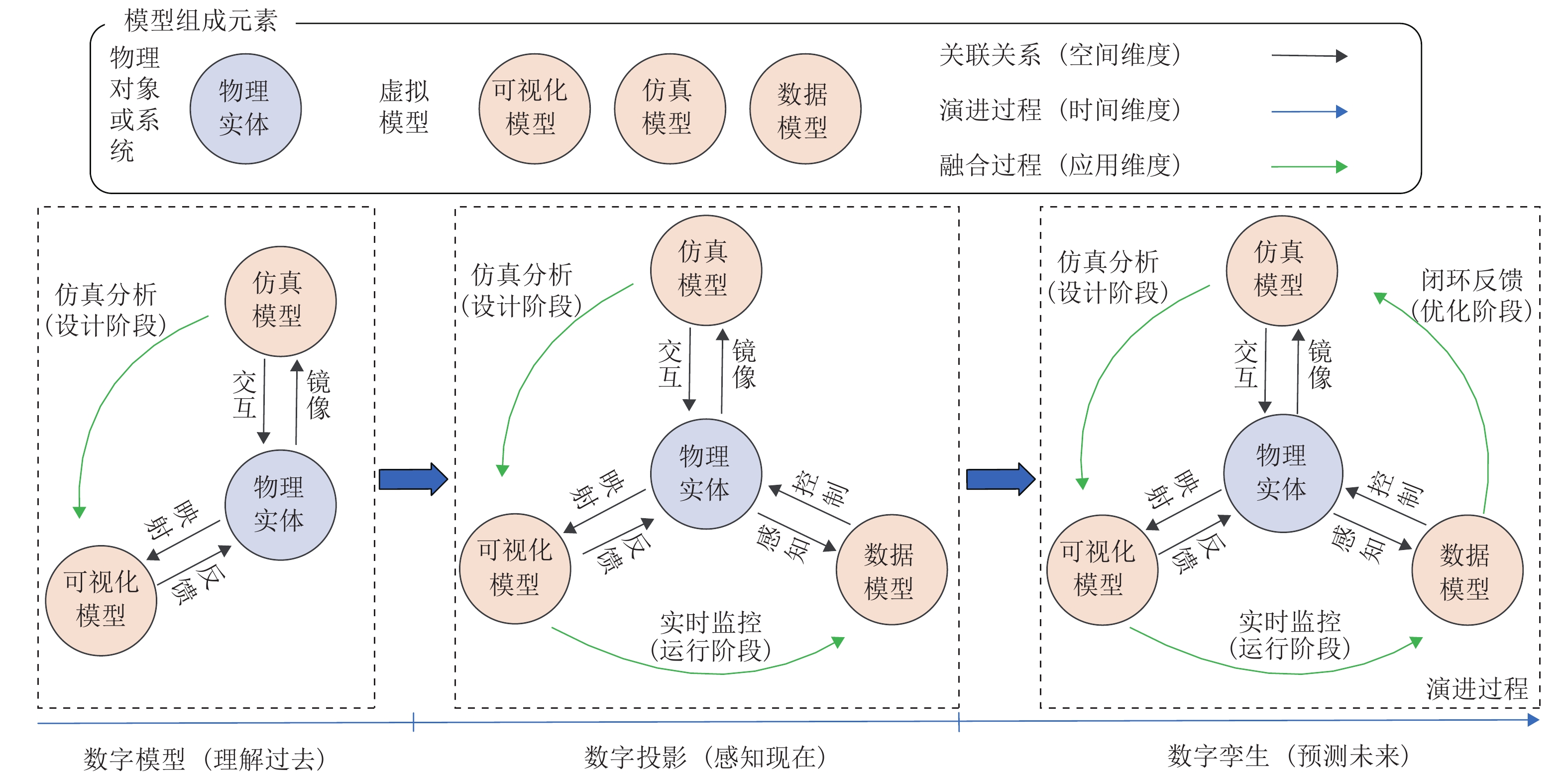
数字孪生作为实现智能制造信息物理融合的关键使能技术受到广泛关注,而如何构建数字孪生模型成为当前研究的热点. 目前,数字孪生模型多聚焦于概念抽象或具体工程应用,而较少从构建方法和过程的角度考虑如何分阶段、有步骤地构建和应用数字孪生模型. 因此,本文提出数字孪生演进模型的概念,将数字孪生构建与应用过程分为数字模型、数字投影以及数字孪生3个演进阶段,给出各演进阶段的应用方法、关键技术与工具平台,并探讨数字孪生演进模型在智能装备、智能生产、智能运维方面的典型应用. 研究结果表明:所提模型为数字孪生在智能制造中的分步实施提供了可行的技术路线与有益的应用参考.
Abstract:As a key enabling technology for the cyber-physical fusion of intelligent manufacturing, the digital twin has drawn extensive concern. And how to build a digital twin model has become a current research hotspot. At present, digital twin models are mostly focused on conceptual abstraction or specific engineering applications, and seldom consider how to construct and apply digital twin models step by step from the perspective of construction methods and processes. Therefore, this paper proposed the digital twin evolution model (DTEM), which divides the construction and application process of the digital twin into three evolution stages, namely digital model, digital shadow, and digital twin. Then, the application methods, key technologies and tool platforms of each evolution stage were discussed. And the typical applications of DTEM were explored, including intelligent equipment, intelligent production, and intelligent operation and maintenance. The applications show that the proposed model provides a feasible technical route and useful application reference for the step-by-step implementation of digital twins in intelligent manufacturing.
-
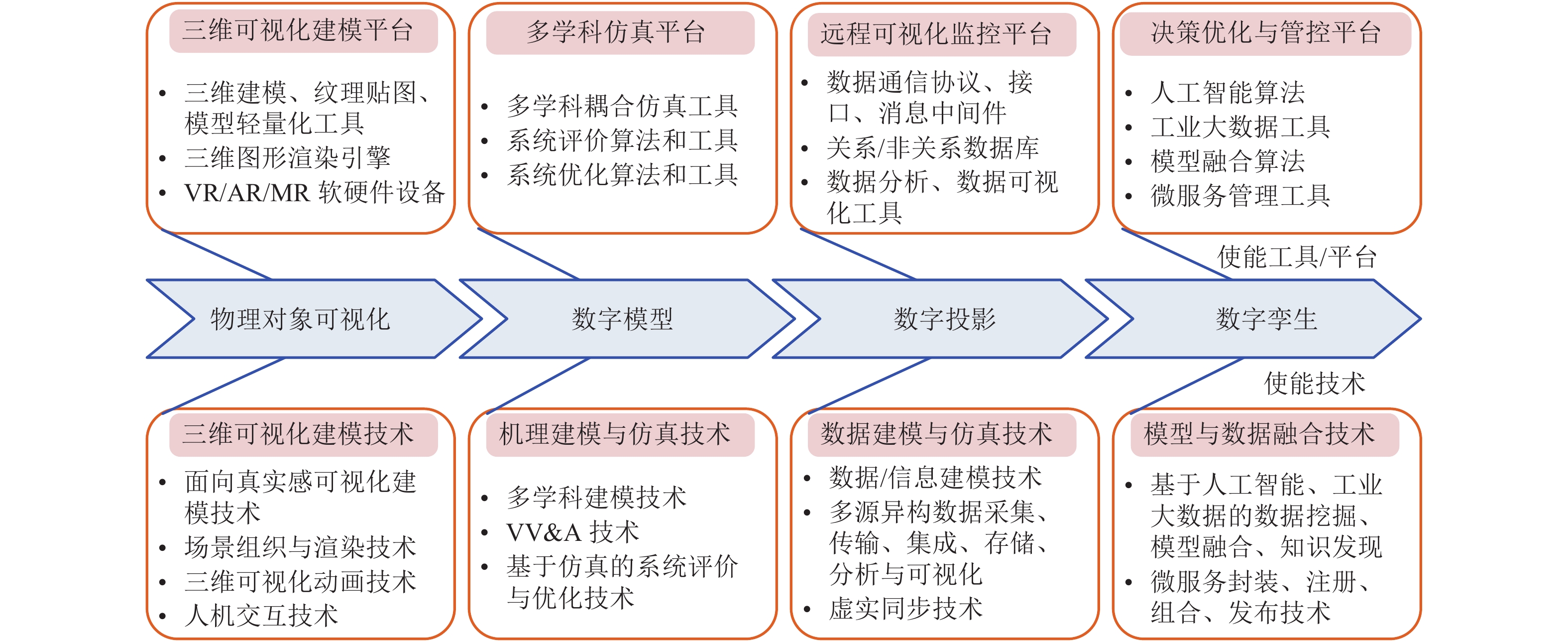
图 3 数字孪生不同应用阶段使能技术与工具/平台
Figure 3. Enabling technologies and tools/platforms for digital twin at different stages of application
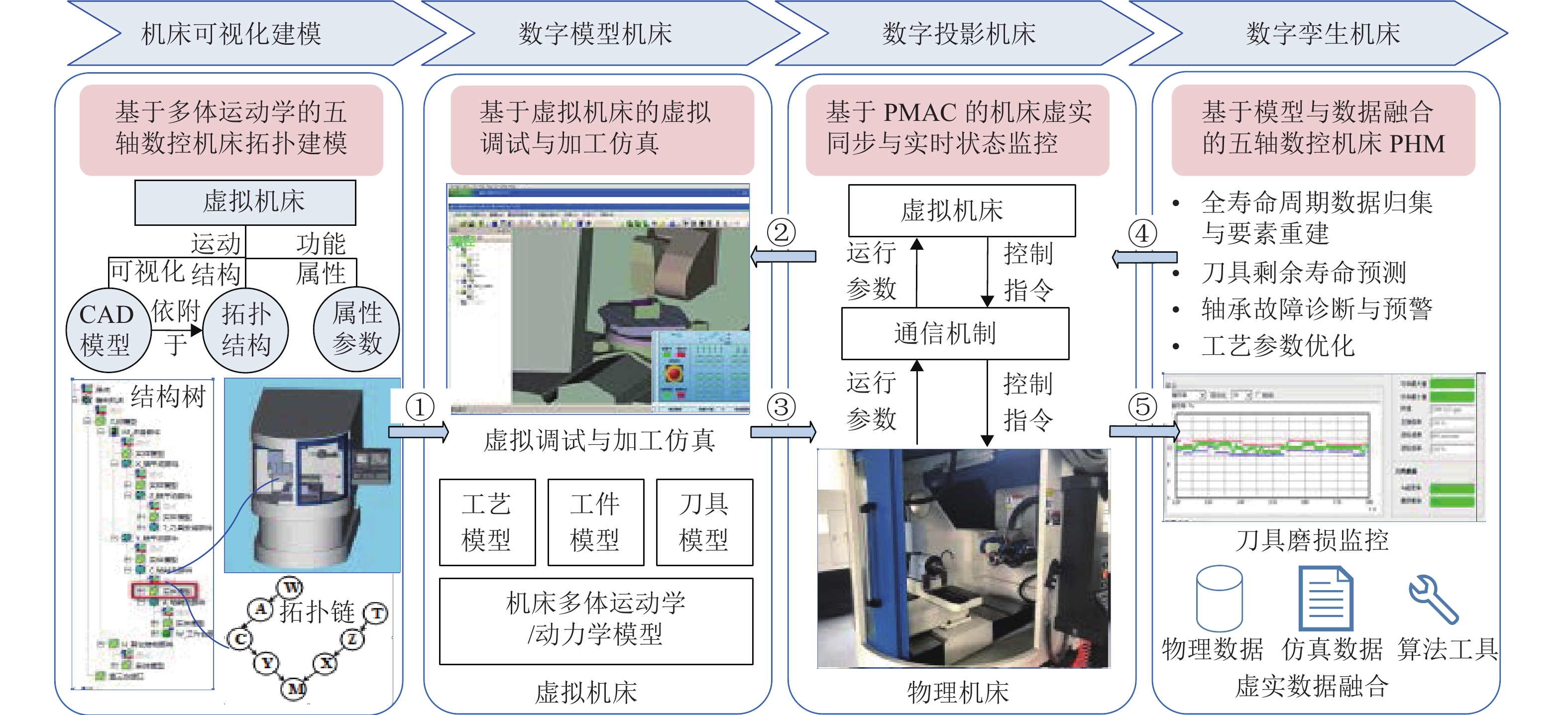
图 4 数字孪生演进模型在智能设备中的应用
①:虚拟机床;②: 控制指令和数控程序;③: 验证和优化后的控制指令和数控程序;④:实时数据、仿真数据归集形成历史数据集;⑤ :数据决策与控制.
Figure 4. Application of digital twin evolution model in smart devices

图 5 数字孪生演进模型在智能生产中的应用
SCADA:数据采集与监视控制系统;HDFC:hadoop分布式文件系统;ERP:企业资源计划;MES:制造执行系统;①: 虚拟车间;②: 生产指令和生产计划/调度方案;③: 验证和优化后的生产指令和生产计划/调度方案;④: 实时数据、仿真数据归集形成历史数据集;⑤:数据决策与控制.
Figure 5. Application of digital twin evolution model in smart production
-
[1] TAO F, ZHANG M. Digital twin shop-floor: a new shop-floor paradigm towards smart manufacturing[J]. IEEE Access, 2017, 5: 20418-20427. doi: 10.1109/ACCESS.2017.2756069 [2] DING K, CHAN F T S, ZHANG X D, et al. Defining a digital twin-based cyber-physical production system for autonomous manufacturing in smart shop floors[J]. International Journal of Production Research, 2019, 57(20): 6315-6334. doi: 10.1080/00207543.2019.1566661 [3] TAO F, ZHANG M, LIU Y S, et al. Digital twin driven prognostics and health management for complex equipment[J]. CIRP Annals, 2018, 67(1): 169-172. doi: 10.1016/j.cirp.2018.04.055 [4] 陶飞,刘蔚然,张萌,等. 数字孪生五维模型及十大领域应用[J]. 计算机集成制造系统,2019,25(1): 1-18.TAO Fei, LIU Weiran, ZHANG Meng, et al. Five-dimension digital twin model and its ten applications[J]. Computer Integrated Manufacturing Systems, 2019, 25(1): 1-18. [5] BAO J S, GUO D S, LI J, et al. The modelling and operations for the digital twin in the context of manufacturing[J]. Enterprise Information Systems, 2019, 13(4): 534-556. doi: 10.1080/17517575.2018.1526324 [6] CECIL J, ALBUHAMOOD S, CECIL-XAVIER A, et al. An advanced cyber physical framework for micro devices assembly[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2019, 49(1): 92-106. doi: 10.1109/TSMC.2017.2733542 [7] JIANG H F, QIN S F, FU J L, et al. How to model and implement connections between physical and virtual models for digital twin application[J]. Journal of Manufacturing Systems, 2021, 58: 36-51. doi: 10.1016/j.jmsy.2020.05.012 [8] KRITZINGER W, KARNER M, TRAAR G, et al. Digital twin in manufacturing: a categorical literature review and classification[J]. IFAC-PapersOnLine, 2018, 51(11): 1016-1022. doi: 10.1016/j.ifacol.2018.08.474 [9] 江海凡,丁国富,张剑. 数字孪生车间演化机理及运行机制[J]. 中国机械工程,2020,31(7): 824-832, 841. doi: 10.3969/j.issn.1004-132X.2020.07.008JIANG Haifan, DING Guofu, ZHANG Jian. Evolution and operation mechanism of digital twin shopfloors[J]. China Mechanical Engineering, 2020, 31(7): 824-832, 841. doi: 10.3969/j.issn.1004-132X.2020.07.008 [10] QI Q L, TAO F, ZUO Y, et al. Digital twin service towards smart manufacturing[J]. Procedia CIRP, 2018, 72: 237-242. doi: 10.1016/j.procir.2018.03.103 [11] 赵颖,侯俊杰,于成龙,等. 面向生产管控的工业大数据研究及应用[J]. 计算机科学,2019,46(增1): 45-51.ZHAO Ying, HOU Junjie, YU Chenglong, et al. Study and application of industrial big data in production management and control[J]. Computer Science, 2019, 46(S1): 45-51. [12] 陈建. 通用五轴数控加工仿真系统研发[D]. 成都: 西南交通大学, 2014. [13] 肖通,江海凡,丁国富,等. 五轴磨床数字孪生建模与监控研究[J]. 系统仿真学报,2021,33(12): 2880-2890.XIAO Tong, JIANG Haifan, DING Guofu, et al. Research on digital twin-based modeling and monitoring of five-axis grinder[J]. Journal of System Simulation, 2021, 33(12): 2880-2890. [14] 骆伟超. 基于Digital Twin的数控机床预测性维护关键技术研究[D]. 济南: 山东大学, 2020. [15] 丁国富, 江海凡, 罗樟圳, 等. 一种任务车间生产计划验证方法: CN110989527A[P]. 2020-04-10. [16] 罗樟圳,江海凡,付建林,等. 基于组合赋权的离散车间生产计划综合评价[J]. 系统仿真学报,2021,33(8): 1856-1865.LUO Zhangzhen, JIANG Haifan, FU Jianlin, et al. Combination weighting-based comprehensive evaluation for discrete workshop production plan[J]. Journal of System Simulation, 2021, 33(8): 1856-1865. -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 1494
- HTML全文浏览量: 1574
- PDF下载量: 252
- 被引次数: 0