

Automatic Search Method for Trestle Position of Freight Cableways
-
摘要:
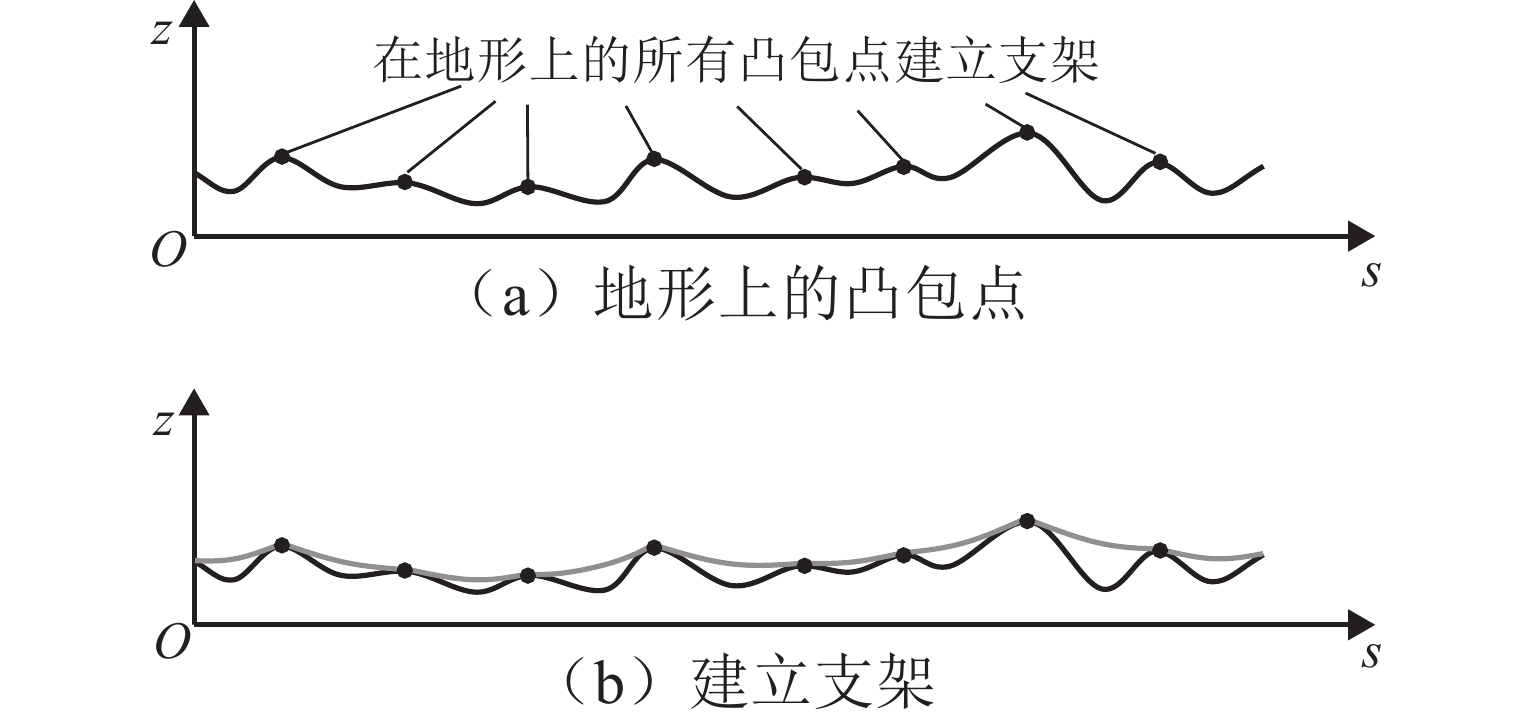
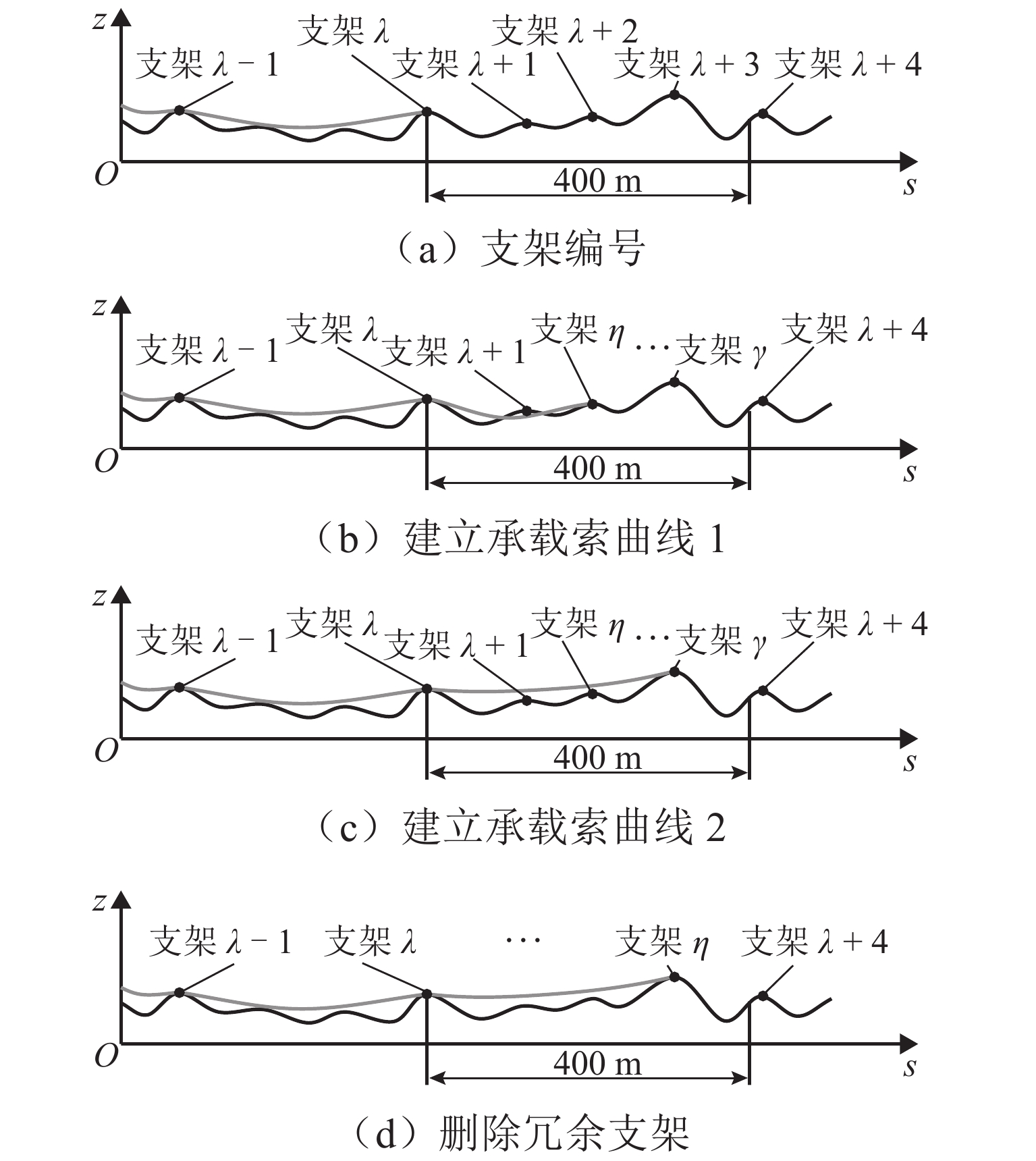
针对货运索道支架位置自动搜索方法缺失的问题,提出了凸包点遍历法、地形自适应法和干涉点搜索法等3种索道支架位置自动搜索方法,均能够实现二维地形剖面上的索道支架位置自动搜索. 其中:凸包点遍历法在地形凸包点建立支架,通过冗余支架筛除获得支架位置;地形自适应法通过判断索道承载索曲线在下降过程中与地形的干涉条件确定支架位置;干涉点搜索法采用在承载索曲线与地形的最大干涉位置添加中间支架的方法实现支架位置搜索. 3种方法的支架位置搜索成功率差别不大,分别为9.12%、8.38%和8.26%,但干涉点搜索法的计算速度分别是凸包点遍历法和地形自适应法的5.8倍和3.5倍. 因此,在实际工程应用中,建议使用速度最快的干涉点搜索法进行输电线路货运索道支架位置自动搜索.
Abstract:As there is a lack of automatic search method for trestle positions of freight cableways, three methods, namely convex-point traversal method, terrain adaption method, and interference-point search method, are proposed, all of which can search trestle positions automatically on two-dimensional terrain profile. Of them, the convex-point traversal method treats all the convex points on the profile as potential trestle position, and obtains the trestle position by screening the redundant trestle. The terrain adaption method determines the trestle position by the interference condition between the carrying rope curve of the cableway and the terrain during the descent of the carrying rope. In the interference-point search method, the trestle positions are picked by adding intermediate trestle at the maximum interference position between the carrying rope curve and the terrain. The success rate of these methods are 9.12%, 8.38% and 8.26%, respectively, which show little difference. However, the search speed of the interference-point search method is 5.8 times and 3.5 times the convex-point traversal method and the terrain adaption method, respectively. Therefore, in field applications, it is suggested to use the fastest interference-point search method to search the trestle position for the freight cableway of transmission lines automatically.
-
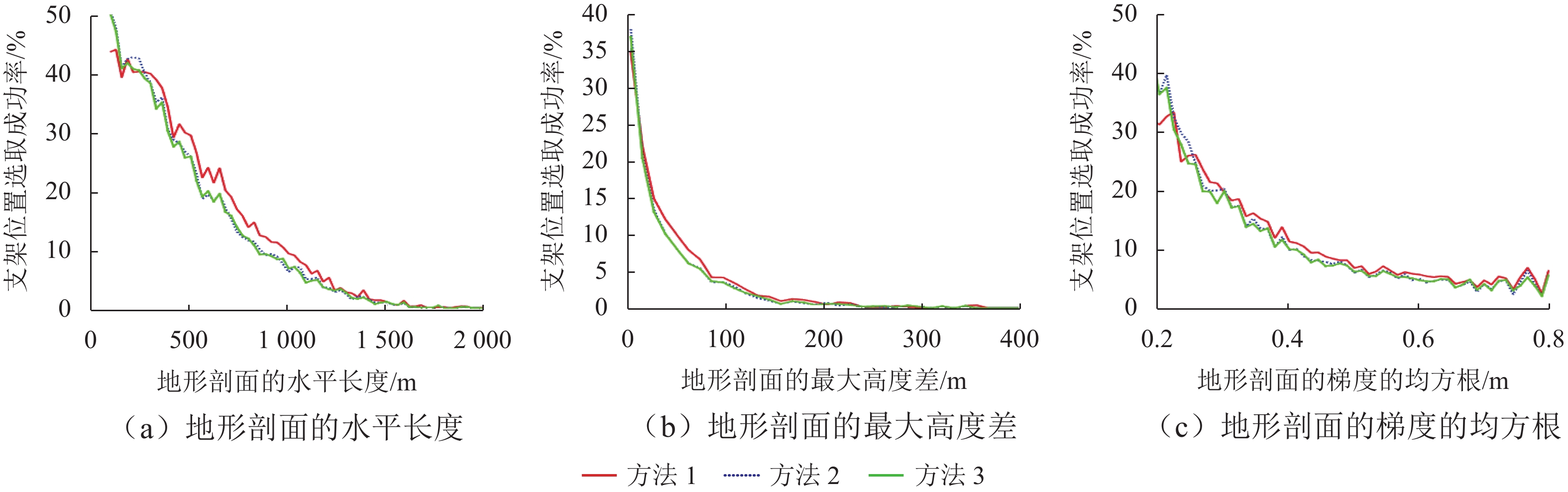
图 9 各因素对支架位置搜索成功率的影响
Figure 9. Influence of various factors on success rate of trestle position search
表 1 本文提出的3种方法的计算结果对比
Table 1. Comparison of results obtained by three proposed methods
项目 方法 1 (凸包点遍历) 方法 2 (地形自适应) 方法 3 (干涉点搜索) 二维地形
剖面数/万个10 10 10 单个地形剖面平均计算时间/ms 6.07 3.59 1.04 成功搜索支架位置的索道数/条 9122 8383 8255 二维地形剖面支架位置搜索成功率/% 9.12 8.38 8.26  下载: 导出CSV
下载: 导出CSV
-
[1] SZLOSAREK R, YAN C G, KRÖGER M, et al. Energy efficiency of ropeways:a model-based analysis[J]. Public Transport, 2019, 11(3): 617-635. doi: 10.1007/s12469-019-00212-1 [2] 叶建云,王成波,郑力维,等. 带转角货运索道研究及应用[J]. 工程与建设,2015,29(5): 701-703,706. doi: 10.3969/j.issn.1673-5781.2015.05.041 [3] 缪谦. 我国电网建设工程施工货运索道运输方式的研究[J]. 华北电力技术,2010(12): 12-15. doi: 10.3969/j.issn.1003-9171.2010.12.003MIAO Qian. Research of transportation way by cargo cableway in construction of power grid[J]. North China Electric Power, 2010(12): 12-15. doi: 10.3969/j.issn.1003-9171.2010.12.003 [4] 缪谦,白雪松. 货运索道运输技术与设备研究[J]. 电力建设,2009,30(12): 93-96. doi: 10.3969/j.issn.1000-7229.2009.12.025MIAO Qian, BAI Xuesong. Study on transportation technology and equipment in freight cableway system[J]. Electric Power Construction, 2009, 30(12): 93-96. doi: 10.3969/j.issn.1000-7229.2009.12.025 [5] 李靖. 货运索道自动化关键技术研究与应用[D]. 成都: 西南交通大学, 2014. [6] 江明. 考虑索间耦合效应的双索货运索道系统设计[J]. 机械设计与制造,2020(9): 80-84. doi: 10.3969/j.issn.1001-3997.2020.09.020JIANG Ming. Design of double cable freight ropeway system considering coupling effect between cables[J]. Machinery Design & Manufacture, 2020(9): 80-84. doi: 10.3969/j.issn.1001-3997.2020.09.020 [7] 秦剑,乔良,江明,等. 多承载索货运索道计算方法及张力不平衡效应分析[J]. 中国安全生产科学技术,2019,15(9): 44-49. doi: 10.11731/j.issn.1673-193x.2019.09.007QIN Jian, QIAO Liang, JIANG Ming, et al. Calculation method of material ropeway with multiple carrying ropes and analysis of tension unbalance effect[J]. Journal of Safety Science and Technology, 2019, 15(9): 44-49. doi: 10.11731/j.issn.1673-193x.2019.09.007 [8] 秦剑,乔良,李其莹,等. 多索索道承载索耦合计算方法及安全性评估[J]. 安全与环境学报,2020,20(2): 433-440. doi: 10.13637/j.issn.1009-6094.2019.0033QIN Jian, QIAO Liang, LI Qiying, et al. Calculation method of the coupled loading-cables and safety assessment for the multi-cable cableway[J]. Journal of Safety and Environment, 2020, 20(2): 433-440. doi: 10.13637/j.issn.1009-6094.2019.0033 [9] 秦剑,乔良,张映晖,等. 多档货运索道动力计算方法及结构冲击影响研究[J]. 动力学与控制学报,2020,18(2): 59-68.QIN Jian, QIAO Liang, ZHANG Yinghui, et al. Calculation method for dynamics of multi-span freight cableway and influence of structure impact[J]. Journal of Dynamics and Control, 2020, 18(2): 59-68. [10] 张卫东,秦剑,陈迪,等. 工作索耦合作用下多档多载荷货运索道的分析与计算方法[J]. 工程设计学报,2020,27(3): 293-300. doi: 10.3785/j.issn.1006-754X.2020.00.032ZHANG Weidong, QIN Jian, CHEN Di, et al. Analysis and calculation method of multi-span and multi-load freight ropeway under working-cable coupling action[J]. Chinese Journal of Engineering Design, 2020, 27(3): 293-300. doi: 10.3785/j.issn.1006-754X.2020.00.032 [11] 白雪松,缪谦,王立军,等. 货运施工索道工作索计算软件开发与应用[J]. 电力建设,2009,30(2): 41-44. doi: 10.3969/j.issn.1000-7229.2009.02.010BAI Xuesong, MIAO Qian, WANG Lijun, et al. Development and application of working cable computation software for construction cargo cableway[J]. Electric Power Construction, 2009, 30(2): 41-44. doi: 10.3969/j.issn.1000-7229.2009.02.010 [12] 李洋,李爱华,刘岭梅,等. 辅助索道方案优化设计平台的设计与应用[J]. 地理空间信息,2018,16(1): 115-118,9. doi: 10.3969/j.issn.1672-4623.2018.01.035LI Yang, LI Aihua, LIU Lingmei, et al. Design and application of the auxiliary ropeway scheme optimization and design platform[J]. Geospatial Information, 2018, 16(1): 115-118,9. doi: 10.3969/j.issn.1672-4623.2018.01.035 [13] 王刚, 李志斌. 基于GIS的输电线路路径智能选线研究[C]//第九届京港澳测绘地理信息技术交流会. 北京: [出版者不详], 2015: 157-162. [14] 刘亮亮. 智能式GIS在超特高压输电路径规划中的优选与应用[D]. 昆明: 云南大学, 2017. [15] 谢景海,苏东禹,卢诗华,等. 基于改进蚁群算法的输电线路路径规划关键技术[J]. 电测与仪表,2020,57(4): 122-128. doi: 10.19753/j.issn1001-1390.2020.04.019XIE Jinghai, SU Dongyu, LU Shihua, et al. Key technology of transmission line path planning based on improved ant[J]. Electrical Measurement & Instrumentation, 2020, 57(4): 122-128. doi: 10.19753/j.issn1001-1390.2020.04.019 [16] 李攀,李志斌,谢芳毅,等. 三维GIS辅助山区输电线路货运索道选线系统设计[J]. 数字技术与应用,2016(5): 173-174. doi: 10.19695/j.cnki.cn12-1369.2016.05.120 [17] 贾乃文. 非线性空间结构力学[M]. 北京: 科学出版社, 2002. -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 400
- HTML全文浏览量: 257
- PDF下载量: 16
- 被引次数: 0