

Using Smartphone to Detect Vehicle Running Quality and Its Coordinate Alignment
-
摘要:
因车体坐标系统和手机坐标系统存在角度偏差,为使手机检测数据真实反映车体振动加速度,提出针对手机姿态误差的系统性矫正方法. 该方法以重力方向为基准矫正手机垂向加速度,借助车体横、纵向加速度的正交性矫正手机水平向加速度,并基于极大似然估计原理评估角度偏差,保证手机姿态矫正的可靠性. 结合现场测试结果表明:两部智能手机检测数据经姿态误差矫正得到以重力方向为基准的垂向角度修正值分别为0.008° 和0.007°,两者水平夹角为29.75°,与试验放置夹角30.00° 偏差0.25°;智能手机与高精度传感器检测的车体加速度在时域和频域的幅值、主频均一致.
Abstract:As there is angle deviation between the car body coordinate system and smarphone coordinate system, a systematic correction method for the smartphone coordinate alignment is proposed to make smartphone sensor data truly reflect the vibration acceleration of the vehicle body. This method corrects the smartphone vertical acceleration according to gravity direction, and the smartphone horizontal acceleration by means of the orthogonality of the lateral and longitudinal acceleration of the vehicle body. The maximum likelihood principle is used in the estimation of angular deviation to ensure the reliability of smartphone angle correction. Field test results indicate that the detection data of two smartphones obtained a vertical angle deviation of 0.008° and 0.007° relative to gravity direction, the horizontal angle between both smartphones is 29.75°, and the deviation from the test placement angle 30.00° is 0.25°. The amplitude and main frequency of the vehicle body acceleration respectively detected by the smartphone and the high-precision sensor are consistent in time domain and frequency domain.
-
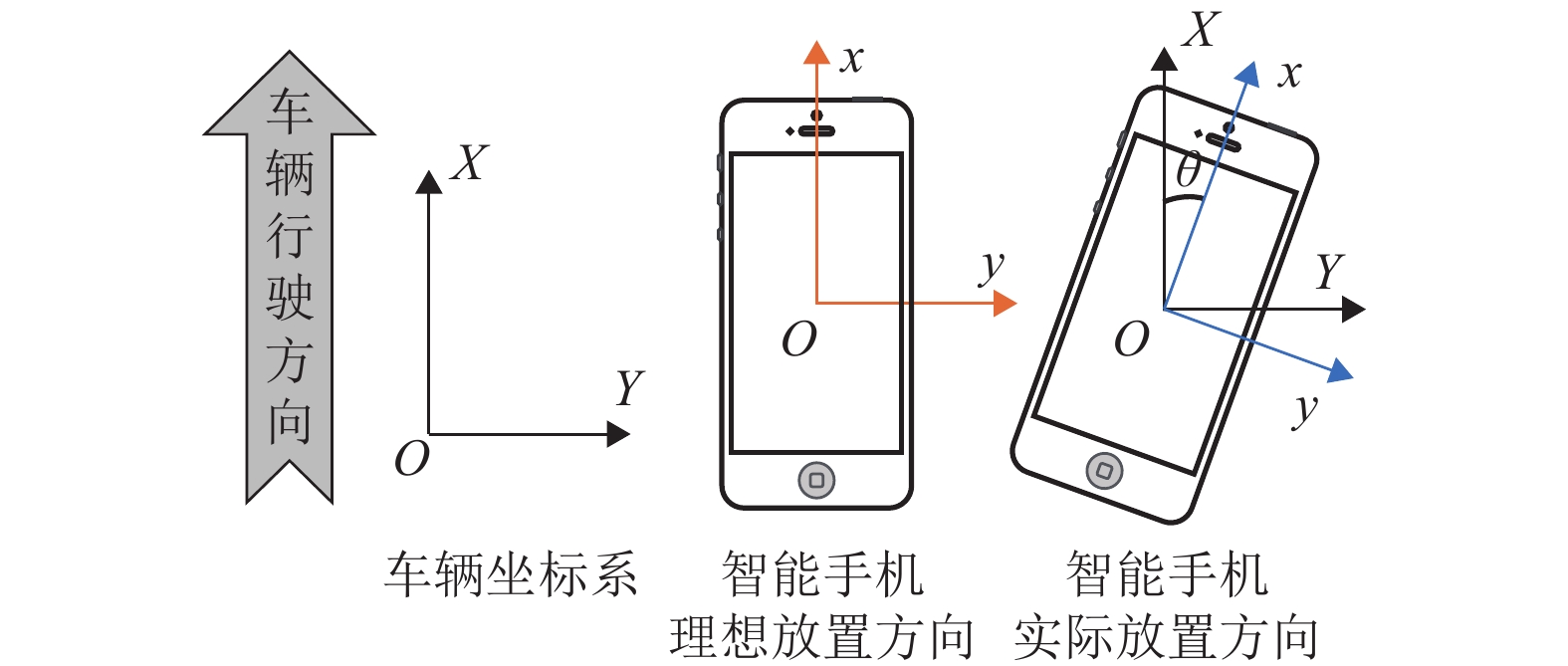
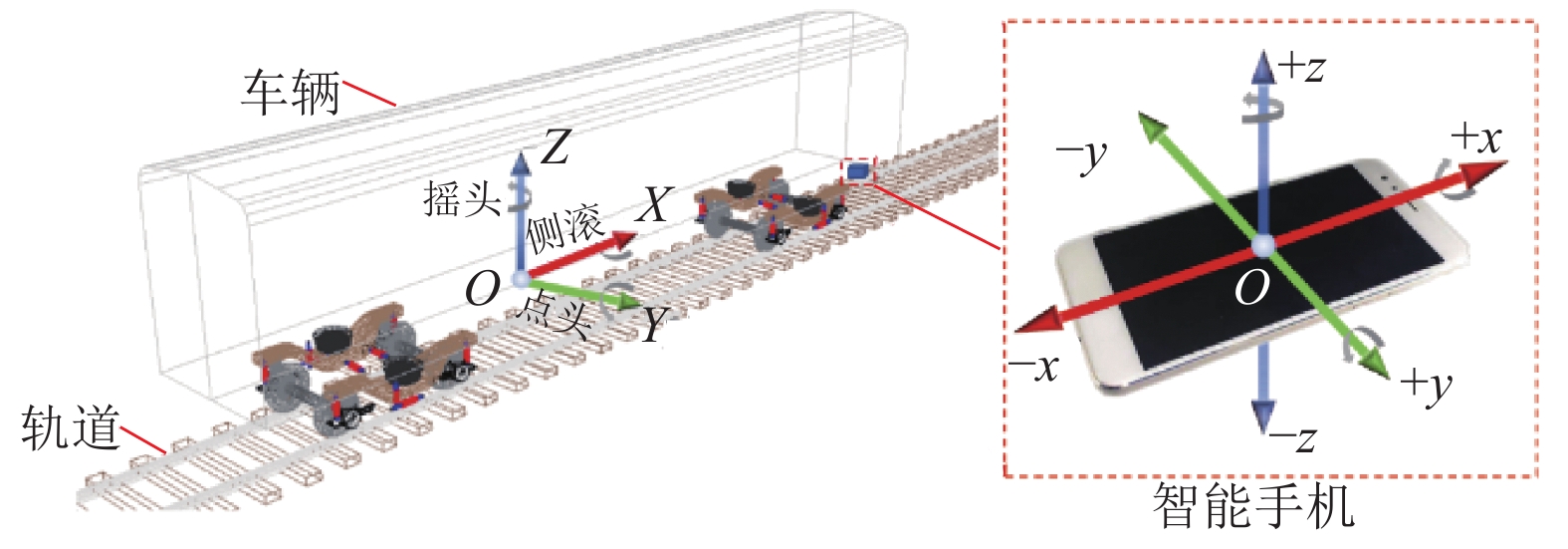
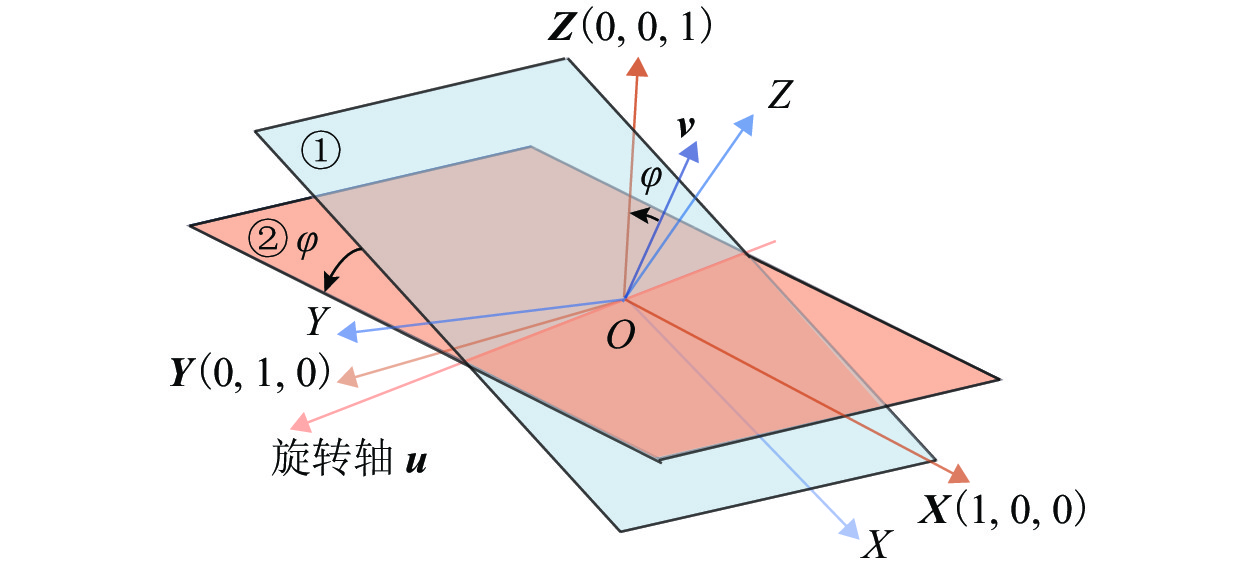
图 4 手机坐标系与车体坐标系角度偏差示意
Figure 4. Angle deviation between smartphone and car body coordinate systems
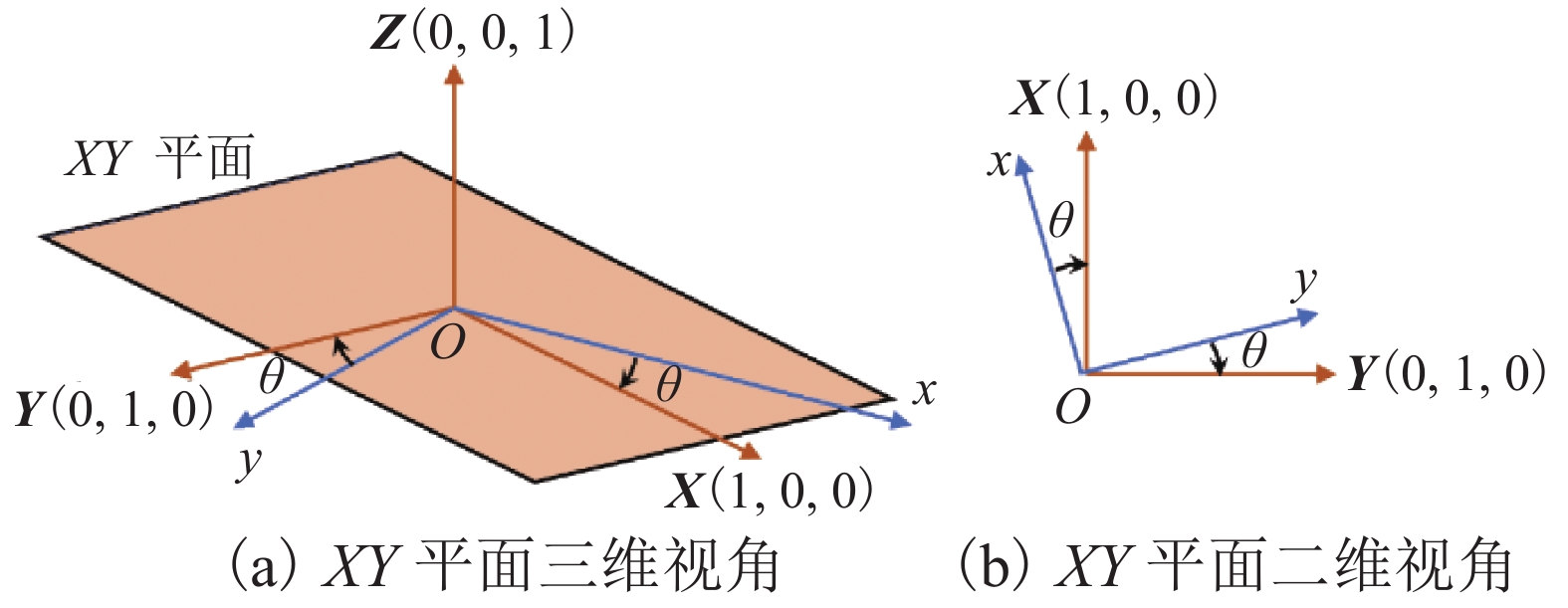
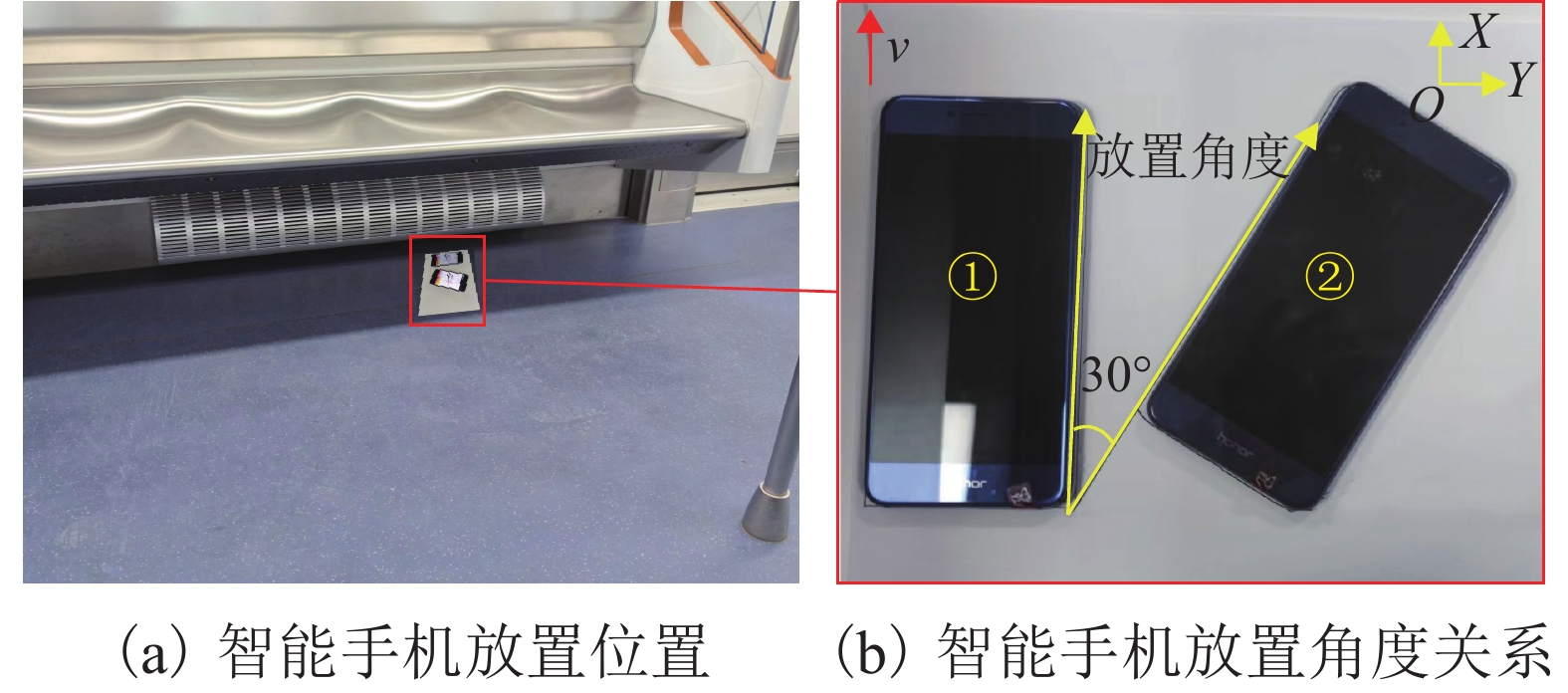
图 5 车体坐标系与手机坐标系的偏差
Figure 5. Deviation between smartphone and car body coordinate systems
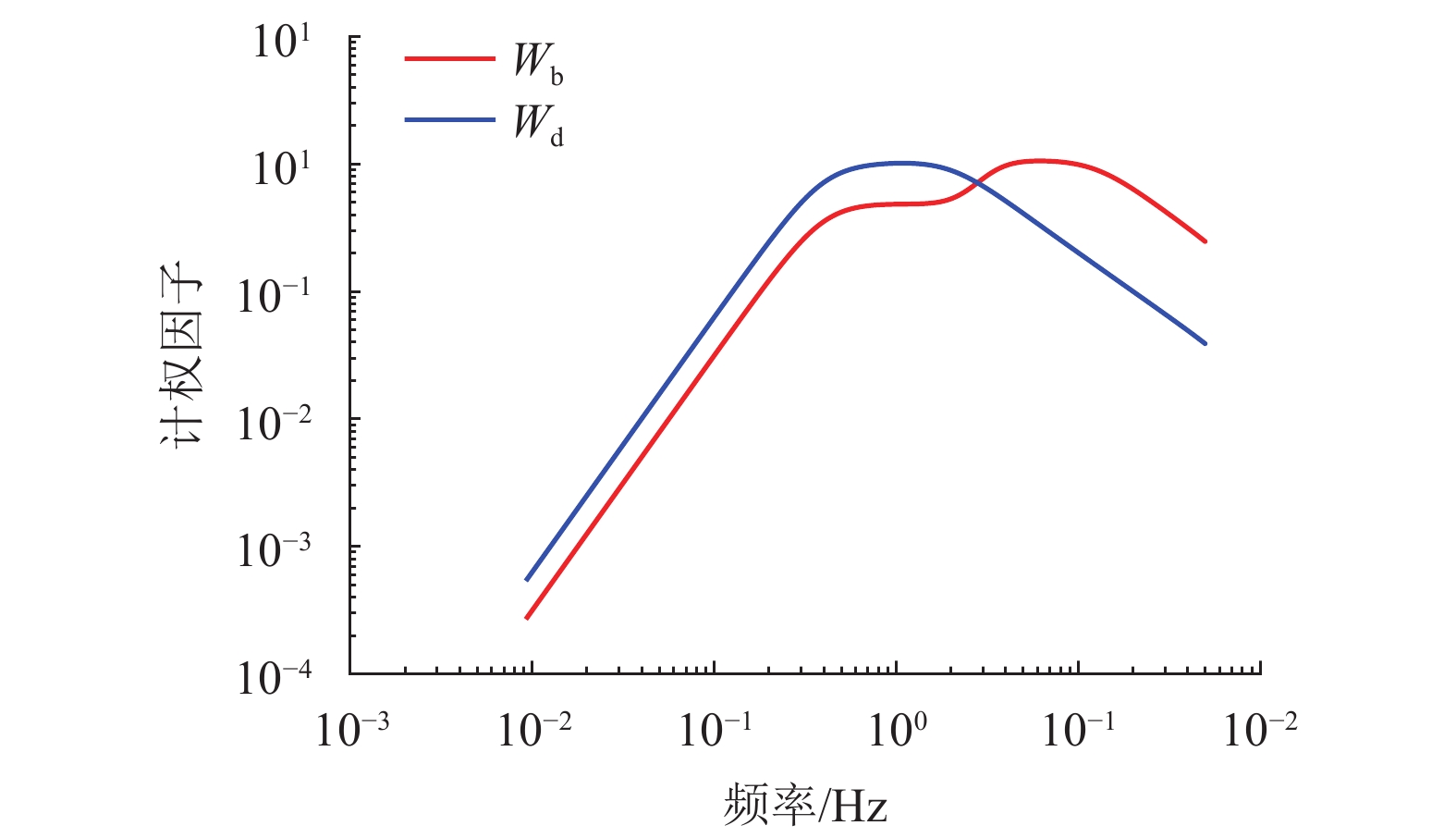
图 6
${W}_{{\rm{d}}}\mathrm{、}{W}_{{\rm{b}}}$ 频率计权曲线Figure 6.
${W}_{{\rm{d}}}$ and${W}_{{\rm{b}}}$ frequency weighting curve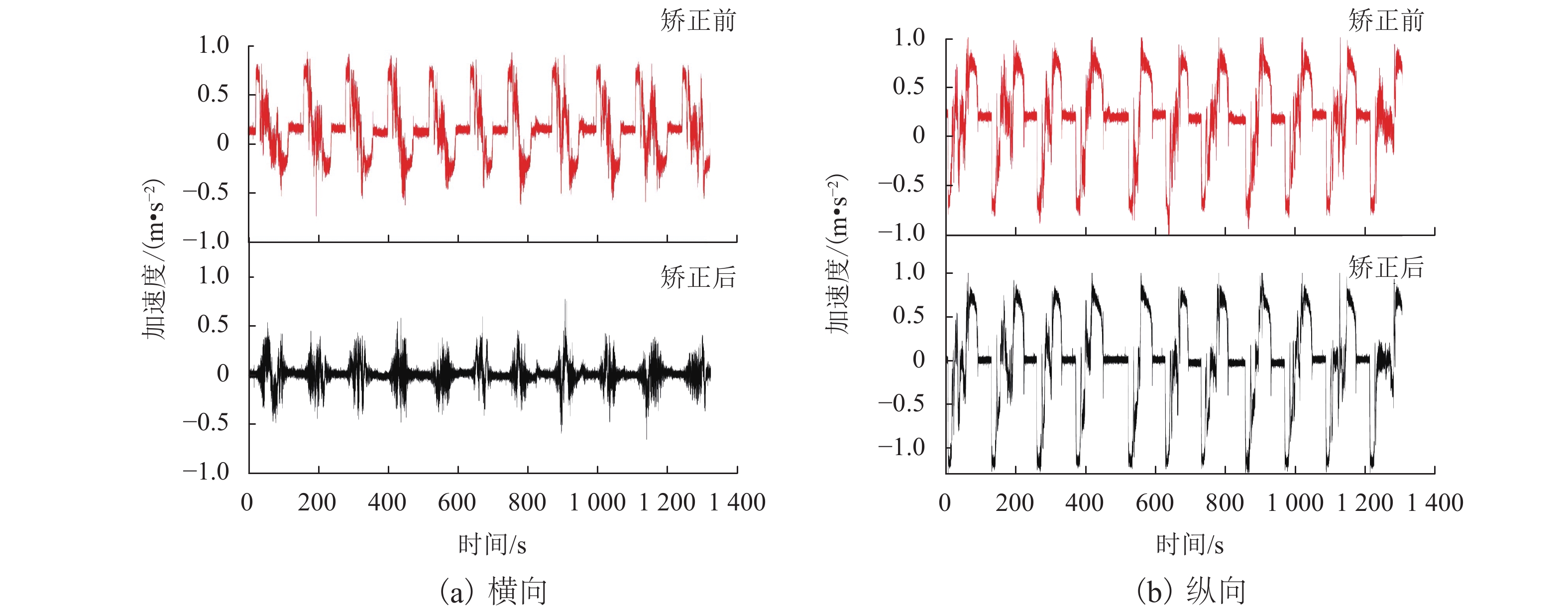
图 12 车体横向、纵向加速度矫正前、后对比
Figure 12. Lateral and longitudinal accelerations before and after coordinate alignment
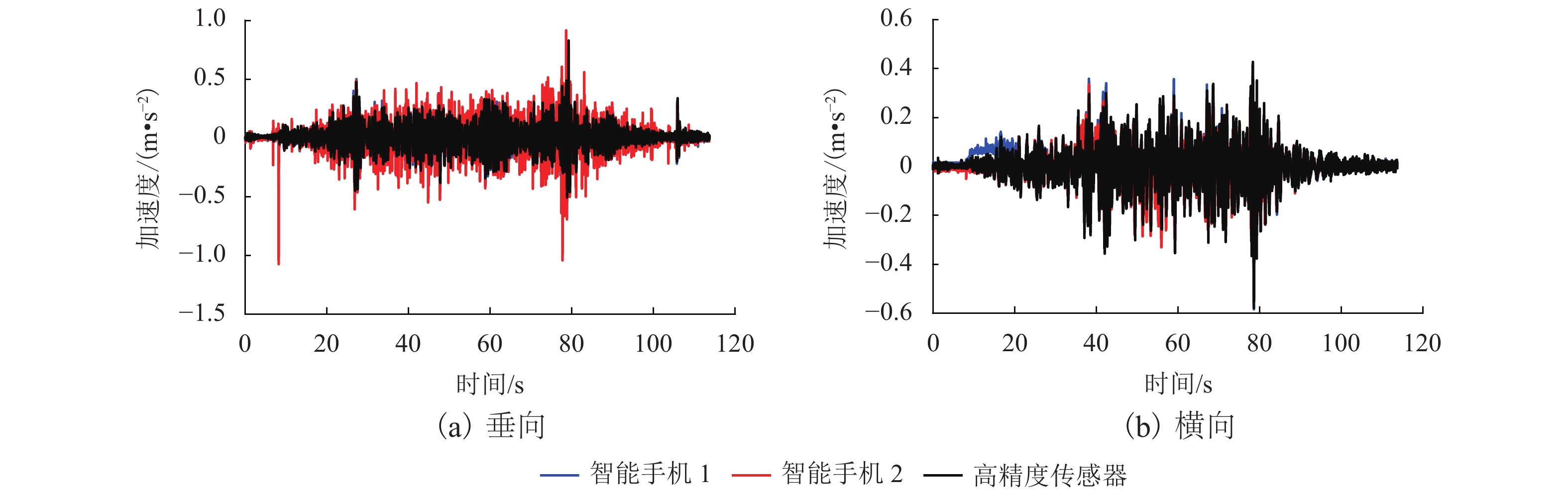
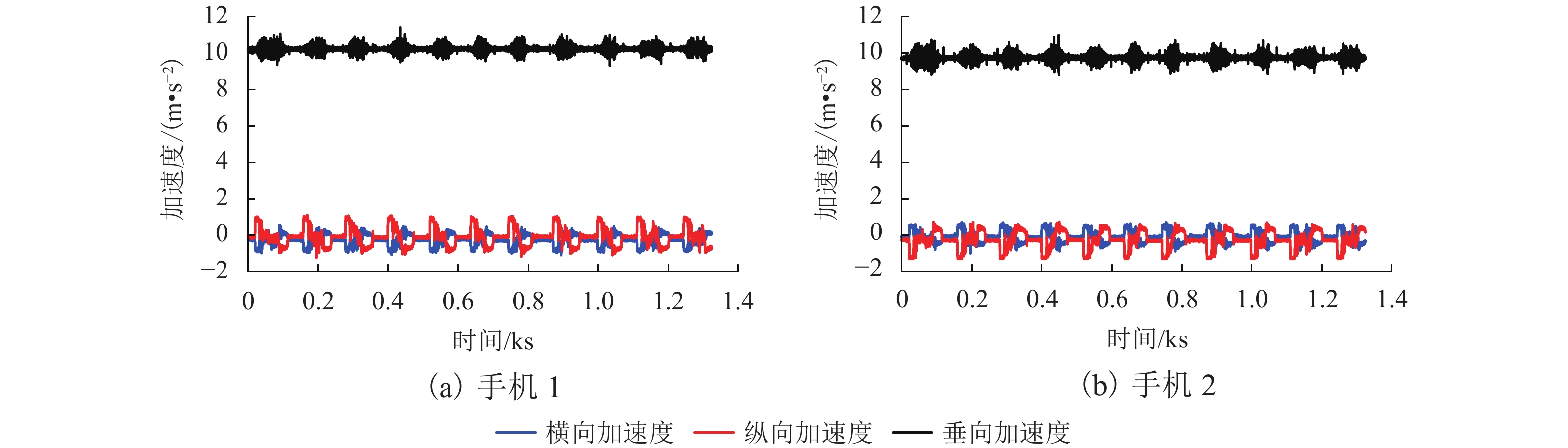
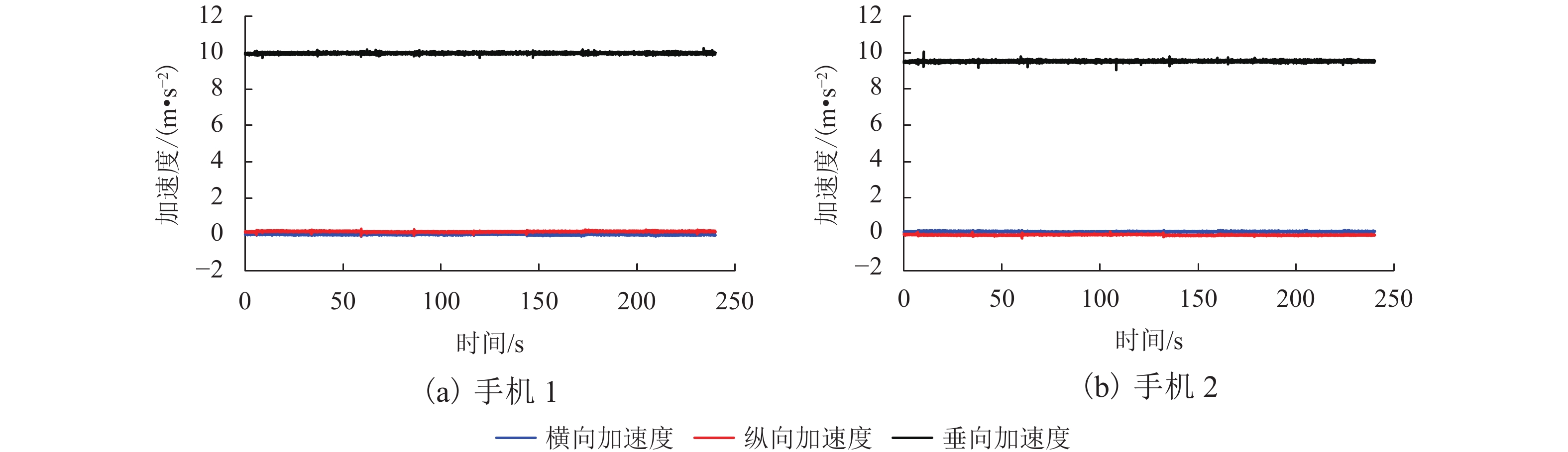
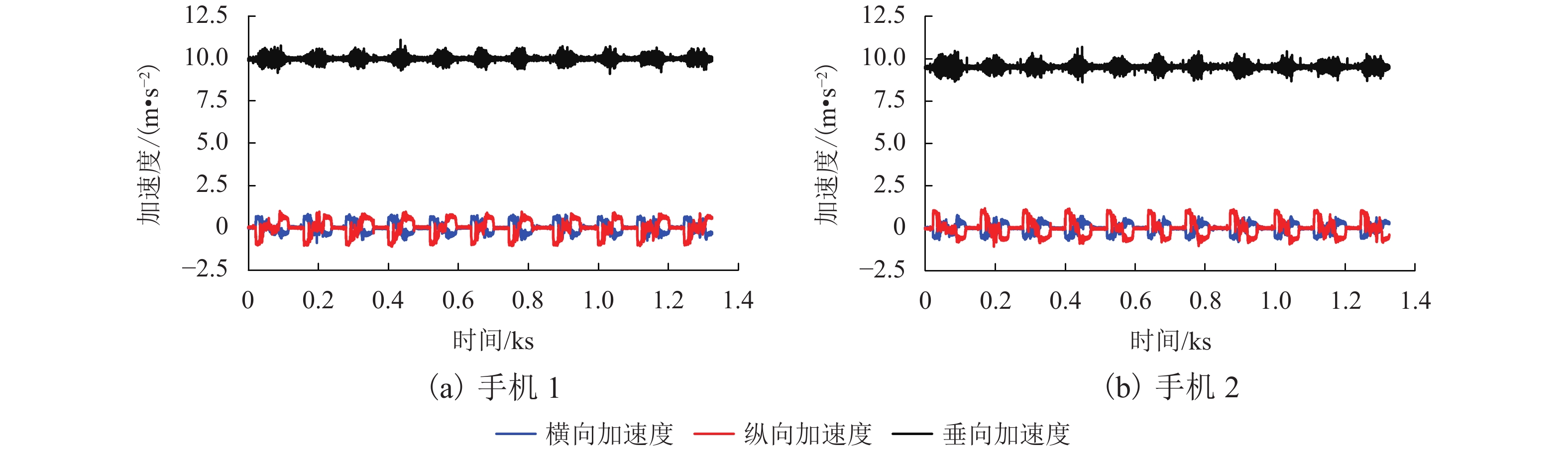
图 14 智能手机与高精度传感器测试数据
Figure 14. Detection data of smartphone and high-precision sensor
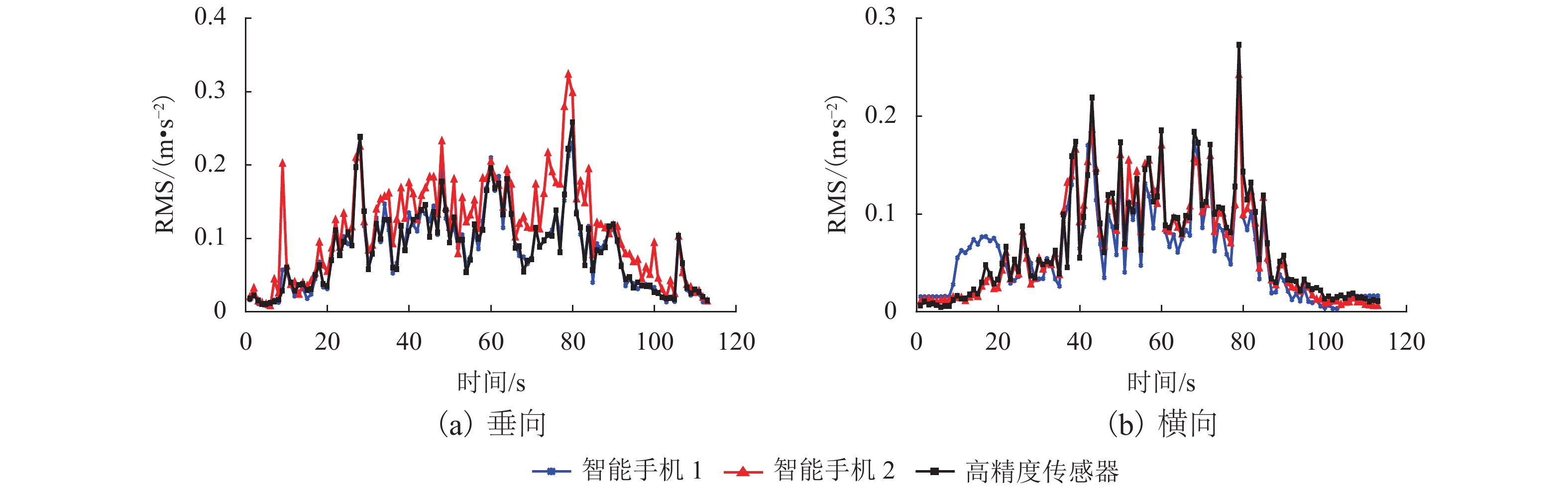
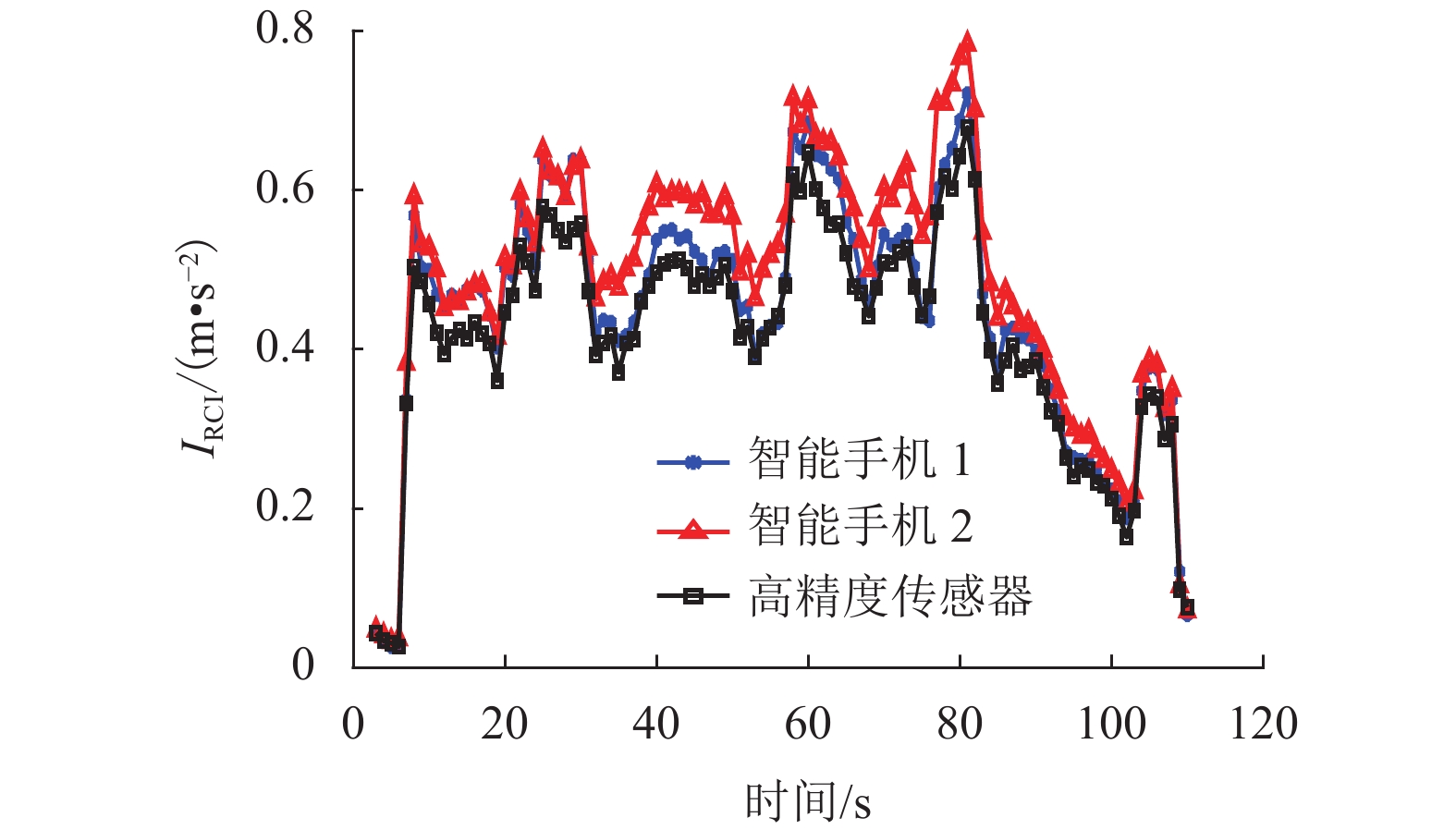
图 15 智能手机与高精度传感器检测数据有效均方根值
Figure 15. Root mean square of detection data from smartphone and high-precision sensor
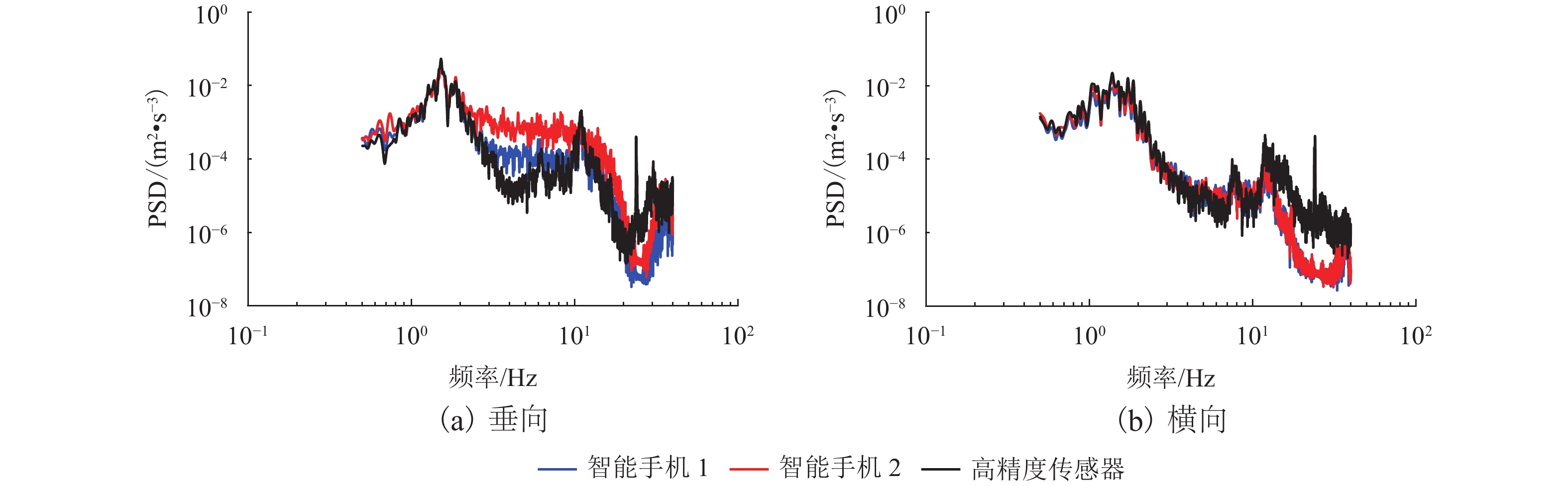
图 16 智能手机与高精度传感器检测数据功率谱密度
Figure 16. Power spectral density of detection data from smartphone and high-precision sensor
表 1 UIC513舒适度等级划分
Table 1. UIC513 comfort level classification
舒适度划分等级 指标取值 评定结果 一级 $I_{\mathrm{R}\mathrm{C}\mathrm{I}} < 1.0$ 非常舒适 二级 $1.0 \leqslant I_{\mathrm{R}\mathrm{C}\mathrm{I} } < 2.0$ 舒适 三级 $2.0 \leqslant I_{\mathrm{R}\mathrm{C}\mathrm{I} } < 4.0$ 还算舒适 四级 $4.0 \leqslant I_{\mathrm{R}\mathrm{C}\mathrm{I} } < 5.0$ 不舒适 五级 $I_{\mathrm{R}\mathrm{C}\mathrm{I} }\geqslant5.0$ 非常不舒适  下载: 导出CSV
下载: 导出CSV
表 2 手机姿态修正角度
Table 2. Smartphone cooridinate alignment angle
手机编号 垂向修正角/(o) 水平向修正角/(o) 1 0.008 −29.750 2 0.007 30.500
下载: 导出CSV
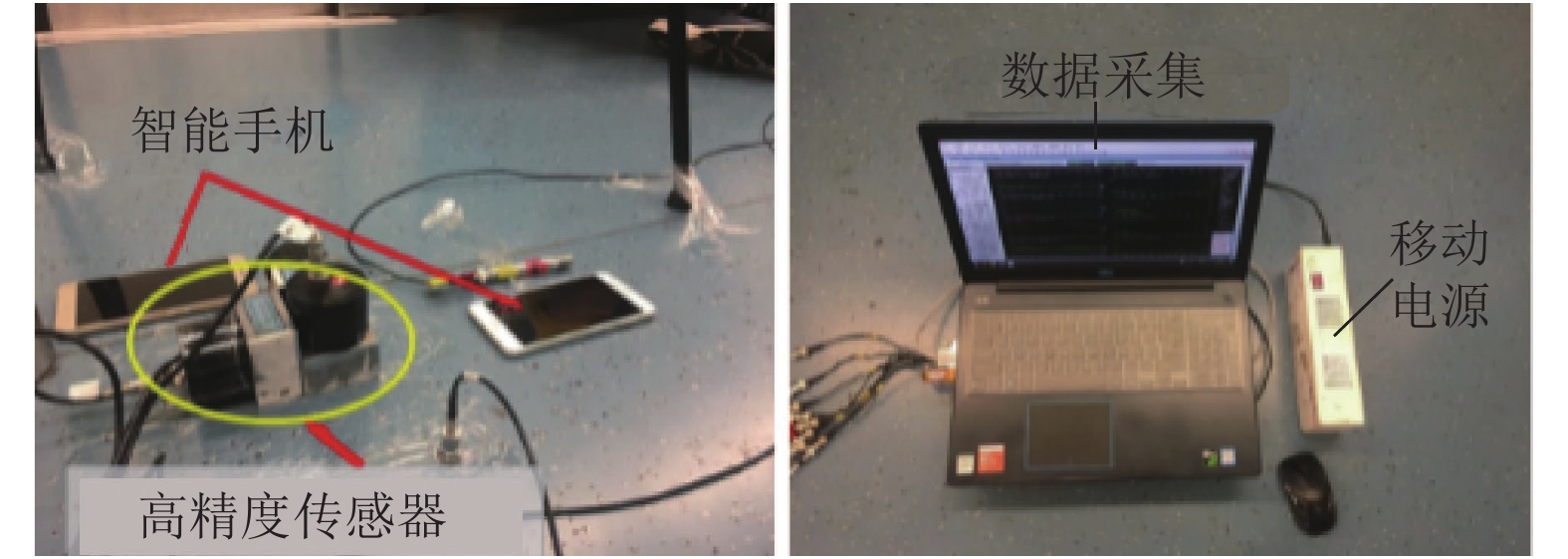
表 3 智能手机与高精度传感器重要参数
Table 3. Main parameters of smartphone and high-precision sensor
精密传感器 智能手机 项目 参数或型号 项目 参数或型号 型号 891-Ⅱ型拾振器 操作系统 Android 4.4 数据采集
设备东方所
Coinv DASP V11芯片 Qualcomm MSM8274AB Snapdragon 800 电源 12 V 移动电源 CPU
GPUTegra4 1.8 GHz
Adreno 330采样频率 100 Hz 采样频率 100 Hz 其他 桥盒及连接线 内存 2 GB RAM
下载: 导出CSV
-
[1] WANG Y, CONG J L, WANG P, et al. A data-fusion approach for speed estimation and location calibration of a metro train based on low-cost sensors in smartphones[J]. IEEE Sensors Journal, 2019, 19(22): 10744-10752. [2] WANG P, WANG Y, WANG L, et al. Measurement of carbody vibration in urban rail tril transtit using smartphones[C]//Transportation Research Board 96th Annual Meeting. Washington D C: [s.n.], 2017: 1-15 [3] JOHANNING E, FISCHER S, CHRIST E, et al. Whole-body vibration exposure study in US railroad locomotives—an ergonomic risk assessment[J]. AIHA Journal, 2002, 63(4): 439-446. doi: 10.1080/15428110208984732 [4] LEE J S, CHOI S, KIM S S, et al. A mixed filtering approach for track condition monitoring using accelerometers on the axle box and bogie[J]. IEEE Transactions on Instrumentation and Measurement, 2012, 61(3): 749-758. doi: 10.1109/TIM.2011.2170377 [5] WANG Y T, QIN Y, WEI X K. Track irregularities estimation based on acceleration measurements[C]//Proceedings of 2012 International Conference on Measurement, Information and Control. Harbin: IEEE, 2012: 83-87. [6] TSUNASHIMA H, KOJIMA T, MARUMO Y, et al. Condition monitoring of railway track and driver using in-service vehicle[C]//4th IET International Conference on Railway Condition Monitoring. Derby: IEE, 2008: 1-6 [7] LEDERMAN G, CHEN S H, GARRETT J H, et al. Track monitoring from the dynamic response of a passing train:a sparse approach[J]. Mechanical Systems and Signal Processing, 2017, 90: 141-153. doi: 10.1016/j.ymssp.2016.12.009 [8] GAO M Y, CONG J L, XIAO J L, et al. Dynamic modeling and experimental investigation of self-powered sensor nodes for freight rail transport[J]. Applied Energy, 2020, 257: 113969.1-113969.19. [9] GAO M Y, SU C G, CONG J L, et al. Harvesting thermoelectric energy from railway track[J]. Energy, 2019, 180: 315-329. doi: 10.1016/j.energy.2019.05.087 [10] WANG Y, WANG P, WANG X, et al. Position synchronization for track geometry inspection data via big-data fusion and incremental learning[J]. Transportation Research Part C:Emerging Technologies, 2018, 93: 544-565. doi: 10.1016/j.trc.2018.06.018 [11] SONG C, WU J, LIU M, et al. RESen: sensing and evaluating the riding experience based on crowdsourcing by smartphones[C]//2012 8th International Conference on Mobile Ad-hoc and Sensor Networks. Chengdu: IEEE, 2012: 147-152. [12] HERRERA J C, WORK D B, HERRING R, et al. Evaluation of traffic data obtained via GPS-nabled mobile phones:the Mobile Century field experi-ment[J]. Transportation Research Part C:Emerging Technologies, 2010, 18(4): 568-583. doi: 10.1016/j.trc.2009.10.006 [13] WANG Y, CHEN Y J, YANG J, et al. Determining driver phone use by exploiting smartphone integrated sensors[J]. IEEE Transactions on Mobile Computing, 2016, 15(8): 1965-1981. doi: 10.1109/TMC.2015.2483501 [14] 从建力,王源,杨翠平,等. 智能手机检测车辆振动加速度数据预处理方法[J]. 数据采集与处理,2019,34(2): 349-357.CONG Jianli, WANG Yuan, YANG Cuiping, et al. Data preprocessing method of vehicle vibration acceleration by smartphone[J]. Journal of Data Acquisition and Processing, 2019, 34(2): 349-357. [15] 罗林, 张格明, 吴旺青, 等. 轮轨系统轨道平顺状态的控制[M]. 北京: 中国铁道出版社, 2006. [16] KIM Y G, KWON H B, KIM S W, et al. Correlation of ride comfort evaluation methods for railway vehicles[J]. Proceedings of the Institution of Mechanical Engineers,Part F:Journal of Rail and Rapid Transit, 2003, 217(2): 73-88. doi: 10.1243/095440903765762823 [17] 铁道部科学研究院机车车辆研究所. 高速试验列车动力车强度及动力学性能规范: 95J01-L[S]. 北京: 铁道出版社, 2019 -

 下载:
下载:





 点击查看大图
点击查看大图
计量
- 文章访问数: 691
- HTML全文浏览量: 321
- PDF下载量: 41
- 被引次数: 0